具有预设性能的鲁棒仿射编队机动控制
2023-03-11马戥军李孟委牛兴龙
马戥军,李孟委,张 鹏,牛兴龙
(中北大学,a.仪器与电子学院; b.仪器科学与动态测试教育部重点实验室; c.电气与控制工程学院,太原 030000)
0 引言
近些年,编队控制作为多智能体协同控制的一个重要研究课题,广泛应用于作战模拟、军事训练、后勤管理和装备保障等方面,并取得了很好的效果。多智能体系统的编队控制任务主要分为编队生成控制和编队机动控制两类。编队生成控制的目的是引导某些智能体形成特定的几何形状。编队机动控制旨在驱动智能体形成指定的几何形状,还要求控制整个编队,以便实现平移、缩放、旋转和其他运动。目前基于位移、距离、方位的3种常规编队控制方法很难实现跟踪时变速度、比例和方向的目标编队[1]。
为了解决多智能体编队机动控制问题,人们提出了许多控制策略。文献[2]中提出了一种多重信息网络编队算法,实现了编队大小和方向的控制;文献[3]中提出了一种基于仿射变换性质的仿射编队方法,领导者可以决定整个编队形状;文献[4]研究了具有给定收敛时间的多智能体系统的仿射编队算法控制问题,通过使用时间标度函数,设计了一种分布式连续控制算法,解决了算法有限时间收敛问题。以上的编队算法解决了编队机动控制问题,但是无法处理外界扰动对编队形状的影响。
为了增强编队控制算法的鲁棒性,文献[5]中将自适应径向基函数神经网络与确定性等效控制技术相结合,解决了外界干扰以及建模误差的不确定性;文献[6]提出了一种基于三重积分器的智能体一致性协议,将积分作用纳入具有双积分车辆的编队跟踪控制器中,并给出了收敛的充分必要条件。以上算法虽然很好地解决了外界干扰问题,但是增加了算法复杂度,且积分项在实际试验中很难实现;文献[7]提出一种固定时间滑模的跟踪控制策略,并设计固定时间扰动观测器,解决了外部未知干扰的影响;文献[8]提出一种具有预设性能的编队算法,以分布式方式实现基于相对位置的多智能体系统编队控制问题,并研究了一阶和二阶动力学情况;文献[9]提出了一种基于距离的鲁棒编队控制算法,同时处理了相邻智能体之间的连通性保持与防碰撞问题。虽然上述文献中的算法都具有很强的鲁棒性,但是无法实现编队机动控制。
文献[10]设计了一个估计器来补偿系统的不确定性,并提出了一个类PI仿射编队控制律来保证追随者实现目标编队;文献[11]通过设计扩张状态观测器估计系统的外部扰动,从而解决外部扰动下的二阶多智能体系统时变跟踪问题;文献[12]设计了一种自适应律以及自适应干扰观测器,能够补偿参数摄动和误差模型对无人机编队飞行的影响;文献[13]采用滑模变结构控制方法设计了多无人机队形保持控制器,解决了无人机跟踪机动飞行的问题。虽然上述文献中的控制律鲁棒性较强,但是需要对误差进行估计,控制律复杂,不易实现。
本文提出了一种具有鲁棒性能的仿射机动编队控制算法,使多智能体系统在受到外界时变干扰的情况下能够快速收敛,在不需要对误差进行估计的情况下达成编队机动控制的目的;利用输入到状态稳定(Input-to-State Stability,ISS)和李雅普诺夫稳定性定理证明了所提算法的渐近稳定性。
1 图论及算法基础
1.1 有向图论
然后,引入有向图的符号拉普拉斯算子的概念。符号拉普拉斯矩阵是指与具有正和负实非对角项的图相关联的拉普拉斯矩阵。矩阵Ls定义为
(1)
式中:ω∈R,是边(j,i)上的正或负实数权重;Ls通常是非对称矩阵。
1.2 仿射可定位

A(r)={p∈Rmn:p=[In⊗X(t)]r+1n⊗Y(t),
∀X∈Rm×m,∀Y∈Rm}
(2)
式中,(X,Y)记作仿射变换。
定义1一个标称编队(,r)如若能够实现仿射定位,需要同时满足如下两个条件:

在该定义中,第一个条件是关于领航者的选择,而第二个条件则是有向图的条件。然后提出如下假设。
假设1 假设n个智能体的标称编队(,r),满足具有m维仿射张成,pf能够由p唯一确定。

定理1假设2成立,给定一个在Rm空间内由n个智能体组成的标称编队(,r),当且仅当中的领航者集合拥有m+1个领航者且跟随者集合f中的每一个跟随者均是m+1可达的,则该(,r)是能够仿射定位的。
由定理1,式(1)可以重写为
(3)
(4)

1.3 问题描述
单积分智能体的动力学模型为

(5)

将时变期望编队定义为
p*(t)=[Im⊗X(t)]r+1m⊗Y(t)
(6)
式中,X(t)∈Rm×m,Y(t)∈Rm是关于时间t连续且时变的,在任意时刻t均在仿射映射A(r)中。

定义跟随者的跟踪误差为
(7)
为简便起见,下文ef简写为e。
2 控制律设计及稳定性证明
通过使用预设性能控制对上述跟踪误差设定性能包络,以实现多智能体系统的鲁棒仿射编队机动控制。
通常应用一组不等式对系统跟踪误差进行上下界限制,即预设性能约束函数
(8)
由式(5)和式(7)可得距离误差动力学
(9)
ρ(t)=(ρ0-ρ∞)exp(-ait)+ρ∞。
(10)
为了处理式(8)中的时变约束,使用误差变换技术将具有约束的系统式(8)转换为新的等效无约束系统。
首先定义调制误差为
(11)
式中,ρ(t)≠0。由式(11)可得
(12)

注1:此处初始误差可以扩展为任意正数,且可以对跟随者设定不同的初始误差,只需要对这些误差设定合适的初始误差界即可。
然后引入误差转换函数
(13)
Ti(·):(-1,1)→(-∞,+∞)是一个光滑的严格递增双射映射,满足Ti(0)=0。可以看出,当且仅当ηi→0时,σi→0。
接下来求σi对时间的导数
(14)
式中
(15)

(16)
综上所述,考虑在多维空间(m∈2,3)中具有动力学式(5)的n个智能体,标称编队为(,r)。且假设3成立的条件下,则设计控制律如下
(17)

(18)


由式(11)和式(9)可得
(19)

1) 第一阶段。由假设3以及式(13)保证Ωη是非空且开放的,且η(0)∈Ωη。此外,hη在t上是连续的,并且在集合Ωη上的是局部利普希茨(Lipschitz)的。因此,由文献[14]中的定理54,在[0,τmax)的时间间隔内,式(18)的最大解η(t)的存在唯一性使得
ηi(t)∈Ωη∀t∈[0,τmax)
(20)

(21)

(22)
式中,λ=0.25λmax(ξ2)λmax(K2)。

(23)

证毕。
3 仿真结果
3.1 零速度领航者
7个智能体的标称编队如图1所示。

图1 7个智能体的标称编队Fig.1 Nominal formation of 7 agents
(24)
且满足其秩为4。假设初始位置p(0)=[4,0,2,2,2,-2,-0.6,1.8,0.5,-2.6,-1.6,2.6,-2.3,-2.6]T,控制增益ki=0.2,在不失一般性的前提下假设外界干扰为δ1=[0.3sin(0.6πt),0]T,δ2=[0.3sin(0.6πt),0.6sin(0.3πt)-0.3cos(0.6πt)]T,δ3=[0,0]T,δ4=[0.6sin(0.3πt),0.3sin(0.6πt)]T。
考虑动力学方程式(5),当领航者速度为0 m/s且外界干扰为δ(t)时,智能体的轨迹如图2所示,可看出在干扰为δ(t)的影响下,控制律式(18)可实现编队。
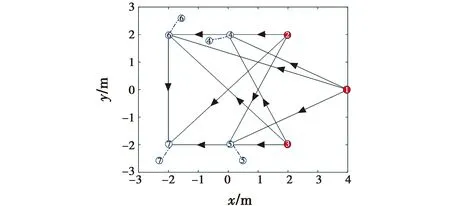
图2 当领航者的速度为0 m/s时智能体的轨迹Fig.2 Trajectory of the agents when the leader speed is 0 m/s
跟踪误差如图3所示,红色虚线表示设定的性能边界,实线表示跟随者的误差变化曲线。仿真结果表明,所提出的控制律式(18)在未知干扰影响的情况下可形成编队且误差始终处于性能边界之内。
3.2 时变速度领航者
时变速度领航者编队智能体速度变化曲线如图4所示。图中,红线所示为领航者的时变速度,蓝线表示控制律式(18)在干扰δ(t)影响下的跟随者的速度变化曲线。另进行一个对比仿真,在相同动力学方程式(5)的前提下,初始位置设为p(0),外界扰动为δ(t),控制增益ki=0.2,Ls如式(24)所示。应注意在没有外界干扰的情况下,文献[3]提出的常规仿射编队控制律
(25)
可以建立理想的编队。式中,vj表示智能体j的速度输入。

图4 速度变化曲线Fig.4 Velocities of the agents
图5所示为控制律式(25)在干扰δ(t)下的误差变化,可以明显看出控制律式(25)并不能处理干扰对编队形状的影响,而图6为控制律式(18)在干扰δ(t)下的跟踪误差,可以看出误差完全收敛于预设性能边界之内。

图5 控制律式(25)的跟踪误差Fig.5 Tracking error when using control law (25)

图6 控制律式(18)的跟踪误差Fig.6 Tracking error when using control law (18)
图7所示为控制律式(18)在外界干扰δ(t)下的轨迹。仿真结果表明,本文提出的控制律能够在外界干扰δ(t)的影响下实现仿射编队机动控制。
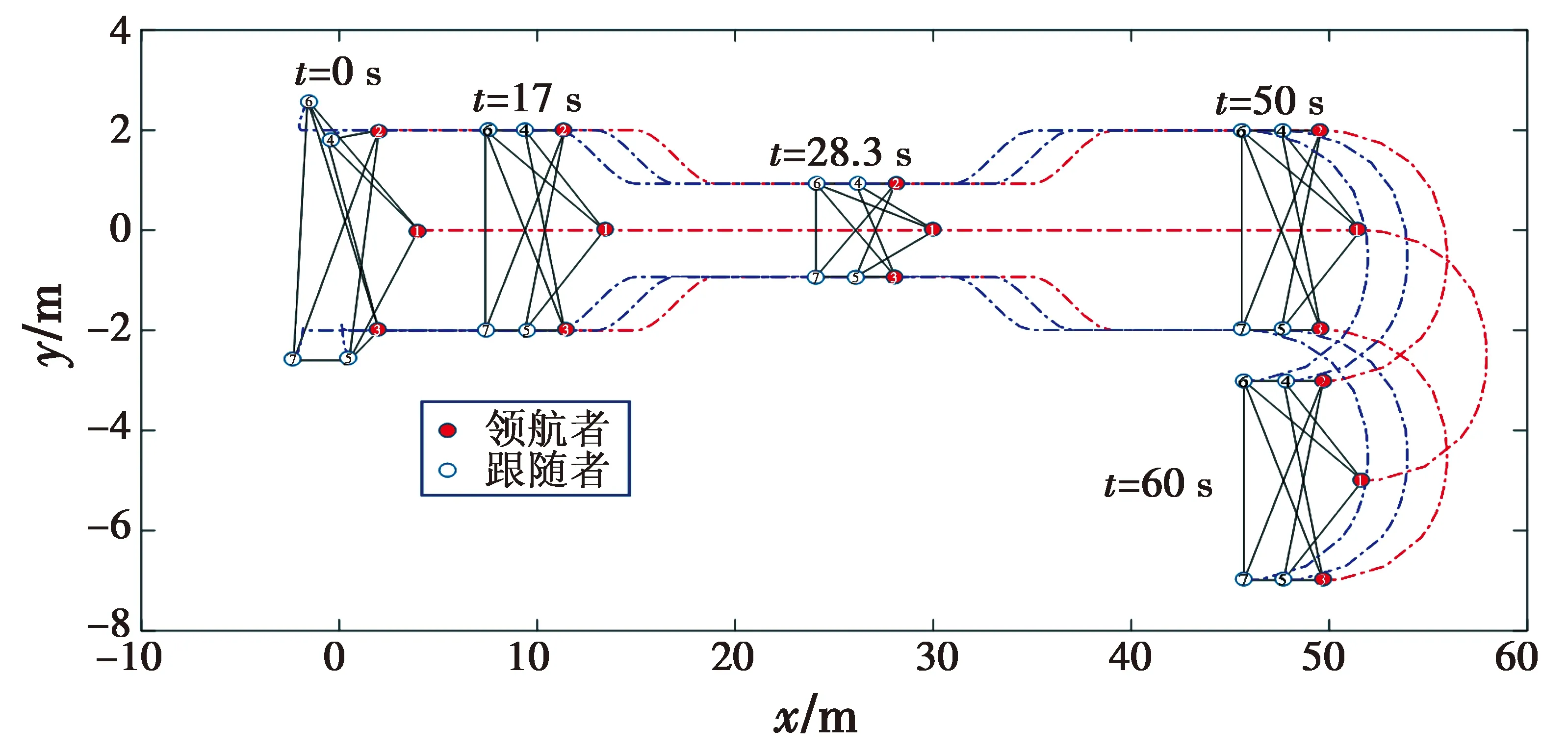
图7 控制律式(18)的轨迹Fig.7 Trajectory when using control law (18)
4 结论
本文解决了一个多智能体仿射编队机动控制的鲁棒性问题。本文通过适当地设定性能边界来约束智能体与期望位置之间的距离误差,提高智能体的收敛速度,保证控制系统的暂态和稳态性能,其中连接图中的每个智能体通过符号拉普拉斯算子更新自己的状态。根据设计的控制协议,合理规划领航者的状态,可以实现平移、缩放、剪切和旋转等时变编队形状且不受外界干扰,跟踪的性能是准确和连续的。在未来,需要研究和解决多智能体在时变时延下的鲁棒仿射编队形成问题。
