非正态响应稳健参数设计的贝叶斯建模与优化
2023-03-09汪建均冯泽彪
马 妍, 汪建均,*, 冯泽彪
(1. 南京理工大学经济管理学院, 江苏 南京 210094; 2. 南京邮电大学管理学院, 江苏 南京 210003)
0 引 言
20世纪70年代,日本著名的质量工程专家田口玄一(Genichi Taguchi)博士以正交试验设计和信噪比为基础提出了稳健参数设计方法。稳健参数设计旨在通过选择可控因子的最佳设置,以减少或控制噪声因子对产品或过程波动的影响,从而设计出对噪声因子变化不敏感的产品或过程。现代质量工程的主流观点认为:波动是导致质量问题产生的根本原因。尽管人们无法完全消除由噪声因素所导致的波动,但是可以对其进行减小或控制[1]。通常情况下,噪声因子可以在试验过程中被控制,但不能在工艺操作或产品使用过程中被控制。噪声因子就是在正常生产过程或使用条件下难以被控制的因子[2-3]。噪声因子包括很多类型,常见的表现形式有:① 工艺参数的变化。例如,反应罐中的温度很重要,如果要考虑由其变化所产生的影响,通常将其视为可控因子。但是,温度在实际生产中会产生波动,因此通常要将温度这个参数的波动看成噪声因子。② 原材料参数的变化。在制造过程中,零部件的实际值与名义值总会有偏离。由于原材料参数通常被视为可控因子,此类误差所形成的噪声因子也被称为“内噪声”。③ 环境的变化。环境条件对响应变量也会有直接的影响,而通常又未被纳入可控因子的范围内。例如,温度、湿度、输入电压等环境的变化可能会直接影响输出响应的波动。上述随着使用条件和环境变化的波动通常被视为外干扰,也称为“外噪声”。此外,产品所承受的外部载荷、元器件的耗损降级等噪声因素也可能会引起输出响应的波动。
在产品生产过程或用户使用过程中,噪声因子时刻影响产品或过程的稳健性能。如何有效地减小或控制噪声因子对产品或过程输出响应的波动,构成了稳健参数设计的核心内容。尽管Taguchi的质量哲学思想已被学术界所普遍接受,但其方法在稳健参数设计的实现技术[4]存在相当大的争议[5],如信噪比效率低下、设计变量缺乏灵活性、正交试验无法考虑因子之间的交互效应、试验设计计划缺乏经济性等。为此,一些统计学家提出了响应曲面方法(response surface methodology, RSM)。RSM[6]是由响应曲面设计、经验模型构建和数值优化技术所组成的系统科学方法。RSM已被广泛地应用于各种产品或过程的质量设计,在连续质量改进活动中提供。著名的统计学家Myers等[7]指出,从更为广泛的意义上看,RSM已成为工业试验的核心。因此,一些统计学家使用RSM来实现产品或过程的稳健参数设计。例如,著名的质量专家Myers[8]曾在质量领域的国际期刊《Journal of Quality Technology》上发表了一篇非常有影响力的综述性论文。在这篇代表性的综述论文中,Myers[8]指出,在过去的20多年内,RSM在稳健参数设计研究中作为方差缩减和过程改进的替代方法备受关注。RSM正转向广义线性模型(generalized linear model, GLM)的使用,包括以logistic和泊松回归为例的应用研究。此外,其他的RSM还包括多响应优化方法、非参数方法和半参数方法。随着计算机模拟技术的发展,以RSM为基础的模拟建模与优化方法也引起了相关学者的广泛关注。例如,著名学者Kleijnen[9]曾围绕上述的研究问题,从模拟优化的视角展开了深入的分析与总结,在国际期刊《European Journal of Operational Research》发表了有代表性的综述论文。
在工业试验的数据分析中,RSM作为传统Taguchi方法的替代方法,有效地弥补了Taguchi方法的不足之处。例如,Myers等[10]借鉴了Taguchi所提出的稳健参数设计基本思想,提出了一种非常具有吸引力的替代方法——RSM方法。首先,假设噪声因子在某种已知分布的范围内变化。然后,通过响应曲面设计所获得的试验数据,分别拟合输出响应与可控因子、噪声因子之间的均值模型和方差模型,即双响应曲面模型[11]。最后,借鉴Taguchi稳健设计思想对其进行最优化(即在最小化响应均值与设计目标值之间的偏差的同时,最大限度地减小响应方差),以获得理想的可控因子设计值。上述的双响应曲面建模方法非常巧妙地回避了Taguchi方法在实现稳健参数设计时所面临的一些有争议性的技术问题。需要指出的是,传统的方法(如RSM方法、Taguchi方法等)通常假定响应数据满足正态或同方差。然而,在实际的质量设计中,分析人员经常会遇到非正态响应的质量设计问题[12]。GLM方法可以看成是一般RSM方法的一种扩展,通常被视为涉及非正态响应的RSM。例如,针对非正态响应,Myers等[13]曾利用GLM来构建输出响应与可控因子、噪声因子之间的函数关系,从而实现了在GLM建模框架下非正态响应的稳健参数设计。
在实际生产或制造过程中,除了噪声因素的影响,模型参数、模型结构、预测误差等不确定性因素将在相当大的程度上影响响应曲面的建模精度与分析结果。例如,Kleijnen[9]指出,在当今的不确定性世界中,稳健优化是极其重要的,在不可控制的环境中,若忽视不确定性的影响,运用RSM或者Kriging模型所得的最优结果可能是难以令人满意的。然而,在传统的响应曲面设计与建模优化中,质量工程师或研究人员往往忽视了模型不确定性对试验结果的影响[14]。
近年来,在复杂产品或先进制造过程的质量设计研究中,考虑不确定性质量设计的建模方法引发了众多学者的研究兴趣。当前,国内外学者主要运用不确定性分析方法(如置信区间[7,15-16]、模糊数学[17]、贝叶斯统计[18-23]以及组合建模[24]等)分析模型参数或模型结构的不确定性对优化结果的影响。贝叶斯方法不仅在建模过程中能够有效地考虑以往的先验知识和经验信息,而且能够在数据分析中对以往的先验信息不断地进行更新和修正。因此,利用贝叶斯方法开展不确定性的质量设计研究已经引起了国内外相关学者的广泛关注和重视。例如,针对多响应优化设计问题,Peterson[25]在多变量回归模型框架下考虑了试验数据的相关性、模型参数的不确定性以及输出响应的波动,通过优化输出响应落入对应规格限的概率来获得最优的参数设计值。Miro-Quesada等[26]扩展了Peterson的研究工作,在贝叶斯响应曲面构建中考虑了噪声因子波动的影响,有效地刻画了模型参数以及噪声因子等不确定性因素对产品或过程的影响。针对多响应优化设计问题,文献[27]在贝叶斯响应曲面建模的框架下,结合质量损失函数和后验概率方法提出了一种新的贝叶斯优化设计方法。该方法运用贝叶斯抽样技术获取多响应的贝叶斯后验样本,并利用输出响应的抽样值构建了质量损失和符合性概率两种优化度量指标,充分地考虑了模型参数不确定性以及响应波动对优化结果的影响。Ouyang等[28]基于似不相关回归模型提出了一种贝叶斯分层建模的优化方法,同时考虑操作人员的偏好信息,提出了一种两阶段的优化策略。在此基础上,Ouyang等[29]进一步拓展了此前的工作,在贝叶斯建模框架下考虑了变量之间的高相关性、非正态性和变量选择问题,提出了一种基于似不相关回归模型的马尔可夫链蒙特卡罗(Markov chain Monte Carlo, MCMC)抽样算法。该抽样算法可以从完整的联合后验分布中产生后验样本,从而能够获得稳健的贝叶斯估计。此外,Yanikoglui等[30]结合模拟的试验数据构建了同时包含可控因子和噪声因子(或环境输入变量)的均值和方差的双响应曲面的元模型(或替代模型),并在此基础上提出了一种可调节的稳健优化方法。针对噪声因子,假设可以根据历史数据获得其均值、方差或协方差的信息,然后利用所观测的噪声因子信息来获得可控因子的最佳设计值。结合噪声因子的在线测量结果,Zhou等[31]提出了一种序贯的支持向量机方法,并利用该方法将前一阶段的最优可控因子设置进行更新,不断地进行迭代,从而获得最佳的参数设计值。Jiang等[32]通过使用高保真模拟器来考虑噪声因子的影响,提出了一种结合质量损失对数正态过程模型和高斯过程模型的新方法,来预测期望质量损失。针对可观测的噪声因子,Yang等[33]结合时间序列模型与贝叶斯方法,提出了一种在线稳健参数设计方法,利用该方法对期望损失函数进行实时调整,从而获得了可控因子的最佳设计值。然而,以往的研究通常假设输出响应服从正态分布,然后利用多项式模型或似不相关回归模型来构建输出响应与可控因子、噪声因子之间的响应曲面模型。此外,如何在贝叶斯模型的框架下考虑参数不确定性以及响应的波动对优化结果的影响,如何有效地度量噪声因子对优化结果的影响,也是稳健参数设计研究领域中非常值得关注的科学问题。
针对非正态响应的稳健参数设计问题,本文首先利用试验数据拟合可控因子、噪声因子以及输出响应之间的响应曲面模型,然后结合经验贝叶斯先验信息获取模型参数的抽样值。其次,假设噪声因子服从已知分布,并利用所估计的参数抽样值获取输出响应的后验抽样值。最后,利用所获的响应后验抽样值来构建符合性概率,并采用遗传算法对所构建的符合性概率函数进行参数优化设计。
1 GLM的贝叶斯分析
1.1 GLM
1972年,Nelder等[34]首次提出了GLM。GLM提供了一组能够广泛应用于回归分析的统一模型,不仅适用于正态响应,也适用于一些常见的非正态响应。在处理非正态响应的试验数据时,常见的方法是利用数据转换方法先将非正态响应转化为正态响应。然而,数据转换方法可能会引起多目标冲突,即要求同时满足正态性、方差齐性和线性可加性可能导致的冲突。GLM利用联系函数灵活地建立起响应方差与响应均值之间的函数关系,从而能够适用于广泛的指数族分布类型。因此,无论是连续性或是离散性的响应变量yi,均能表示为指数族的概率分布形式,其基本的表达形式如下:
f(yi|θi)=exp{a-1(φi){yiθi-φ(θi)}+c(yi;φi)}
(1)
GLM的经典估计方法是极大似然方法。为了简化起见,通常假设φi为已知的,且XT=(x1,x2,…,xn)。在上述假设下,似然函数可以表示为
(2)
与式(2)对应的得分向量为
(3)
与式(2)对应的Fisher信息矩阵为
(4)

1.2 基于GLM的贝叶斯分析
在GLM的贝叶斯分析中,首先需要对模型参数给出合适的先验分布。在式(2)中通常假设模型参数b服从N(b0,Σ),其中假设b0和Σ可以通过已知的信息获得。在给定的试验数据(xi,yi)下,其模型参数b的后验分布为
(5)
通常情况下,上述参数的后验估计难以处理[35]。事实上,在GLM框架下,上述模型参数的后验分布往往不存在任何封闭的表达式。因此,即使是针对中等规模的模型参数,试图通过数值积分方法来获得模型参数的后验均值和方差等统计量都将难以实现。针对上述问题,最为方便的方法是采用MCMC对GLM进行模拟抽样,进而利用所获得的后验抽样值进行后续的统计推断。上述过程通常可以使用Metropolis-Hastings算法实现,但如果后验是对数凹的,则也可以使用Gilks等[36]提出的自适应拒绝采样(adaptive rejection sampling, ARS)方法来实现。
2 非正态响应曲面的贝叶斯建模与参数优化设计
2.1 结合因子效应原则的贝叶斯变量选择
针对非正态响应的质量设计问题,需要考虑的首要问题是如何识别出显著性的因子及其交互效应,即解决变量选择问题。然而,与通常传统回归分析的变量选择不同的是,在试验设计中的变量选择需要考虑试验设计的因子效应原则[28](如效应稀疏、效应排序、效应遗传)。为此,结合以往的研究经验[10,19],在GLM的贝叶斯建模框架下,将试验设计的因子效应原则以贝叶斯先验信息的形式加以考虑。在此,将一个变量指示器γj纳入到GLM的线性预报器ηi中,其表达式为
(6)
式中:γj为二元变量指示器;xij为输入因子;βj为输入因子对应的回归系数。若变量指示器γj=1,则对应的变量包含在模型中;若变量指示器γj=0,则将对应的变量从模型中剔除出去。针对上述的二元变量指示器γj,通常假设其满足相互独立且概率为p的贝努利(Bernouli)分布,即
(7)
式中:pj代表变量指示器γj=1的概率,即pj=Prob(γj=1)。在缺乏先验信息时,通常假设各变量的显著性为等概率,即此时pj=0.5。在此,将结合试验设计的因子效应原则来设置合理的变量显著性概率。例如,在筛选试验中,当主效应相对较多时,通常会根据效应稀疏原则(显著性的因子通常是少数的,即试验设计中的帕累托原则)将变量指示器的先验概率pj设置为0.2。然而,Bergquist等[38]建议当主效应数目较少时,可以将变量指示器的先验概率pj设置为0.5。变量指示器的独立性先验表明:一个主效应的显著性不依赖于另外一个主效应是否显著。然而,因子效应排序原则表明:与高阶效应相比,低阶效应更可能是显著的;同阶效应具有同等程度的显著性。因此,在筛选试验的分析过程中,通常优先考虑因子的主效应以及二阶交互效应,很少考虑三阶及三阶以上的交互效应。此外,在考虑因子交互效应的显著性时,需要结合因子效应遗传原则。若因子交互项AB是显著的,那么其亲本因子A和B中至少有一个是显著的。在筛选试验的数据分析中,若模型仅包含交互效应而未包含所对应的亲本因子,则该模型违反了试验设计的遗传效应原则,应该将其剔除。因此,本文将在贝叶斯建模框架中结合变量指示器的先验概率,进一步考虑因子效应原则,从而更好地识别出显著性因子,建立更加符合实际、更为精确的响应曲面模型。以交互效应AB为例,结合上述的因子效应原则,其交互效应AB的变量指示器的先验概率p可以假设为
(8)
式中:(γA,γB)=(0,0)代表主效应A和主效应B都是不显著的。在这种情况下,其交互效应所对应变量指示器的先验概率p00通常是非常小的(如0.01)。(γA,γB)=(1,0)代表主效应A是显著的,而主效应B是不显著的,其交互效应所对应的变量指示器的先验概率p10通常可以假设为比较小的数(如0.1)。(γA,γB)=(1,1)代表主效应A和主效应B都是显著的。此时,其交互效应所对应的变量指示器的先验概率p11可以假设为比较大的数(如0.3)。若假设所有的模型参数βj之间是相互独立的,则针对模型参数βj,可以采用Ntzoufras[39]所提出的经验贝叶斯先验,其表达式为
(9)

(10)
式中:T和B分别代表变量指示器后验样本γ(t)的总数和燃烧期(即舍弃收敛前的抽样值)。如果变量指示器γ(t)=1,则其二元指示器I(·)=1,反之亦然。通过式(10),能够对所考虑的变量进行显著性排序,并根据研究的需要筛选出合适的显著性因子或效应,以开展后续的响应曲面建模与参数优化设计。
2.2 考虑噪声因子的贝叶斯响应曲面建模
在实验室的环境下,某些噪声因素(如温度等)是可以测量和控制的。在这种情形下,研究人员通常希望能够在试验过程中将这些噪声因子纳入到实验设计中,考虑利用可控因子、噪声因子以及噪声因子与可控因子之间的交互效应来构建响应模型,从而能够通过选择可控因子的最佳参数设计以减小或控制噪声因子对产品或过程波动的影响,从而实现产品/过程的稳健参数设计。为此,结合第2.1节的因子筛选结果,将所筛选的显著性因子划分为可控因子x和噪声因子z,则式(6)中GLM的线性预报器η将变为
ηi=xiβc+ziβn+xiziβcn,i=1,2,…,n
(11)
式中:xi,zi分别代表可控因子和噪声因子的主效应;xizi代表可控因子和噪声因子的交互效应;βc代表可控因子的估计系数;βn代表噪声因子的估计系数;βcn代表可控因子和噪声因子交互效应的估计系数。在此,进一步简化式(9)的经验贝叶斯先验,针对式(11)中的模型参数β赋予如下的先验形式:
(12)

(13)
(14)


(15)
(16)
2.3 结合最小均方误差与贝叶斯后验概率的稳健参数优化
当第2.2节中所获得的模拟响应抽样值达到其稳态分布时,其响应抽样值ynew能够进一步被用来建立其后续的优化指标函数。在给定的试验数据data下,假设输出响应的规格限为A,其模拟输出响应ynew(x)落在其对应规格限A的贝叶斯后验概率函数为
(17)

(18)
上述的最小均方误差函数更多关注输出响应与目标值之间的偏差,以及输出响应的波动,即更多关注的是产品/过程的稳健性。在实际应用中,研究人员需要在最大化符合性概率与最小化均方误差之间进行权衡。为此,本文提出了一种行之有效的优化策略,其具体的优化模型如下:
(19)
式中:p0代表所期望满足的符合性概率,即产品或过程的合格率;L和U分别代表可控因子在试验区域内的上界和下界。在满足所期望的符合性概率的条件下,通过最小化均方误差函数来实现产品或过程的稳健性,从而实现产品/过程的稳健参数设计。上述的目标函数和约束函数都是在输出响应后验样本基础之上构建获得,因此其目标函数和约束函数均表现为高度复杂的非线性特征,传统的优化方法(如线性规划等)将难以获得理想的优化结果。为此,本文将借鉴以往的研究经验,利用混合遗传算法对上述优化模型,即式(19),进行参数优化。
2.4 本文所提方法的实施步骤
针对非正态响应的稳健参数设计问题,本文提出了一种考虑噪声因子的贝叶斯建模与稳健参数优化方法,其具体的实施步骤如下。
步骤 1在GLM框架下结合贝叶斯先验信息考虑试验设计的因子效应原则(如效应稀疏、效应排序、效应遗传),从而筛选出显著性因子效应。
步骤 2将所识别出的显著性因子划分为可控因子和噪声因子,对所构建的贝叶斯响应曲面模型的参数赋予经验贝叶斯先验信息,从而利用Gibbs抽样方法获得模型参数的抽样值。
步骤 3考虑产品制造或使用过程的实际情况,并根据历史数据或经验信息来确定噪声因子的分布信息。在此基础上进一步结合上述参数的迭代抽样值,来更新GLM的均值函数,从而获得考虑噪声因子情形下的输出响应模拟抽样值。
步骤 4利用所获得的输出响应模拟抽样值分别构建最小均方误差函数和贝叶斯后验概率函数,并将二者进行有机的结合,构建一种新的优化模型,即在满足贝叶斯后验概率大于预先设定的期望概率的情况下,最小化均方误差。上述的优化策略不仅能够关注产品或过程的符合性概率,也能够有效地实现产品或过程的稳健性。
步骤 5利用混合遗传算法对所构建的优化模型进行参数优化,从而获得理想的参数设计值。在R软件中,需要将式(19)约束优化问题转化为一种考虑惩罚的适应度函数,然后对所构建的适应度函数进行优化,获得最优的参数设计值。
3 实例分析
3.1 电阻率试验
为了进一步验证本文所提方法的有效性和可靠性,本文选择某测试晶片的电阻率实验[41]来加以说明和分析。在该电阻率实验中,影响电阻率y变化的设计因子主要为:离子注入的剂量x1、时间x2、氧化层的厚度x3,以及温度x4。研究人员旨在通过试验设计方法来寻求影响某测试晶片电阻率的最佳参数设计值。为此,研究人员选择全因子设计24开展相关的研究。考虑到在实际的应用中,温度难以被控制,在此将其视为噪声因子z,具体的实验数据如表1所示。
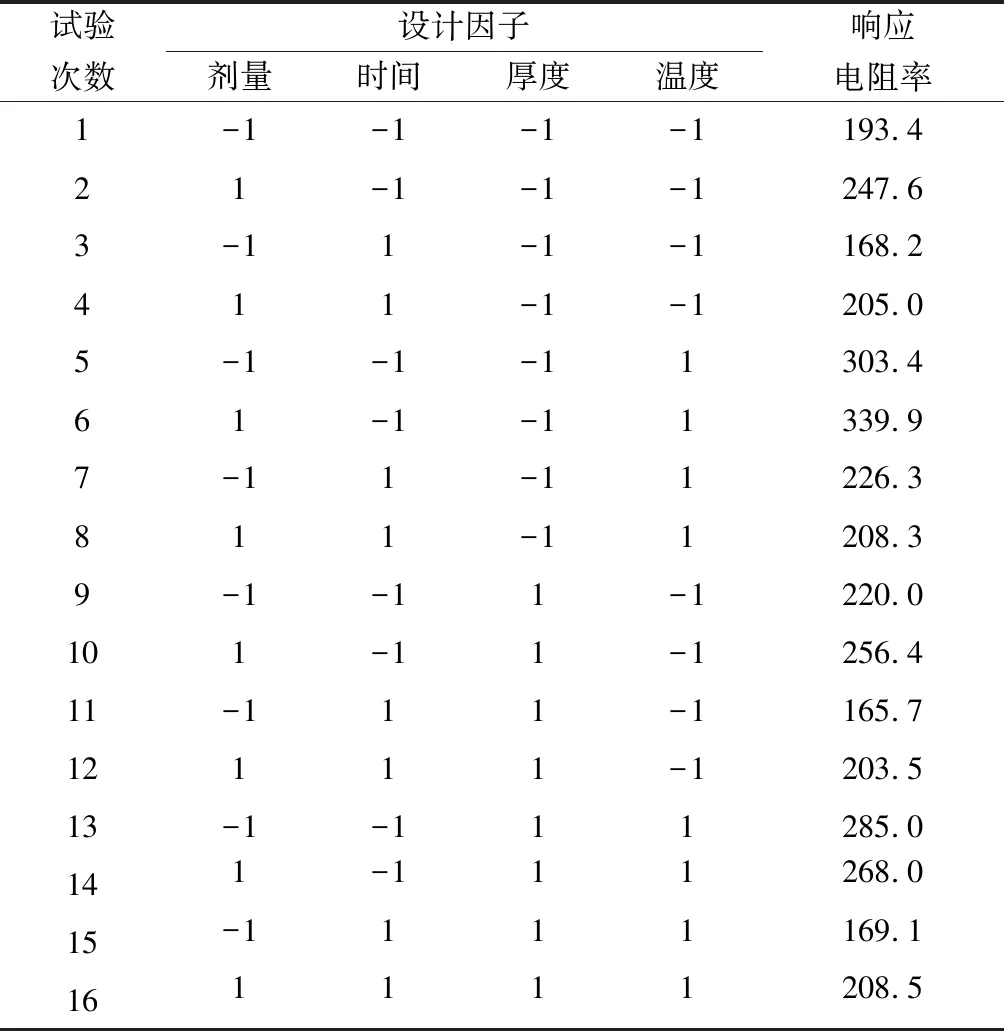
表1 电阻率试验的研究结果
3.2 考虑因子效应原则的变量筛选

然后,由于对模型参数缺乏必要的先验信息,在此假设模型参数的显著性是等概率的,即假设式(7)的pj=0.5。在此基础上,结合式(9)和式(10)计算出各模型参数所对应的变量指示器后验概率值。根据变量指示器后验概率的计算结果可知,因子效应的显著性排序分别为:x2,x4,x1,x3x4,x2x4,x1x4,x3。遗传效应原则是指若交互效应x3x4显著,则所对应的主效应x3或x4至少有一个是显著的。在贝叶斯变量选择中,强遗传效应与弱遗传效应通常通过二阶或高阶交互效应所对应的变量指示器的先验概率加以区分。例如,在强遗传效应下,其二阶交互效应所对应的变量指示器的先验概率如果设置为0.3,则在弱遗传效应原则下其所对应的变量指示器的先验概率需要设置得更低一些,如0.1。需要指出的是,本文在设置变量指示器的先验概率时,不仅考虑了因子效应原则,而且还利用经验贝叶斯先验方法考虑了以往研究方法的参数估计结果。由于本文所选的实际案例所涉及的主效应因子数目较少,且仅考虑了二阶交互效应,因此在考虑因子效应原则时,希望通过强遗传效应对可能显著的交互效应设置较大的先验概率,以保留更多的显著性变量,从而方便与以往的研究方法进行对比和分析。根据因子效应遗传原则和因子效应排序原则,若交互效应x3x4是显著的,其主效应x3、x4往往也可被认为是显著的。为此,需要重新调整一下显著性因子的先验信息,即假设pgamma1→c(1,1,1,1,0,0,0.3,0,0.3,0.3),利用式(10)重新计算可知显著性因子的排序结果更新为:x2,x4,x1,x3,x3x4,x2x4,x1x4。上述的研究结果与以往文献[11]的变量筛选结果存在较小的差别,但更加符合试验设计的基本效应原则。
3.3 响应曲面建模与优化
4 讨 论
4.1 噪声因子波动对优化结果的影响
在产品或过程的稳健参数设计中,研究者始终关注的是如何通过选择可控因子的最佳参数设计值,减少或控制噪声因子对产品或过程波动的影响。因此,探讨噪声因子的波动变化对优化结果的影响,将有助于质量工程师或研究人员更为深刻地理解控制和减少噪声因子的波动对实现产品或过程的稳健参数设计的重要意义。在第3.3节所获得的最佳参数设计值下,通过改变噪声因子的方差以反映噪声因子的波动变化,进而分析了噪声因子方差变化时其输出响应的均方误差和符合性概率的变化情况,其具体的研究结果如表2所示。
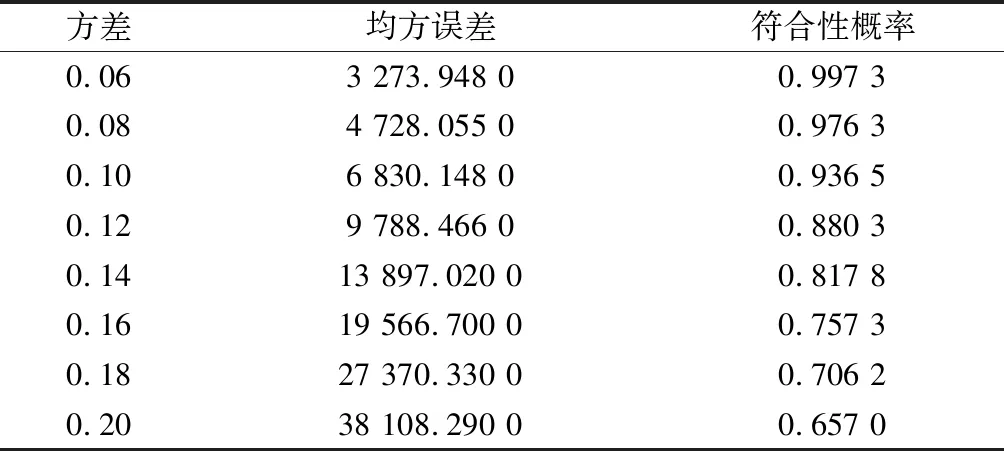
表2 噪声因子方差变化对优化结果的影响
从表2可知,随着噪声因子的方差从0.06逐步增加到0.20,其均方误差也逐步增大,同时其符合性概率则逐步减小。因此,在实现产品或过程的稳健参数设计时,需要收集噪声因子变化的历史数据信息或采用传感器等新兴技术在线获取噪声因子变化的信息,充分利用噪声因子的变化信息以更好地提高产品或过程的稳健性和可靠性,从而提升产品或过程的质量设计水平。
4.2 不同研究方法的比较
在此,进一步考虑了因子遗传效应原则(特别是强遗传效应和弱遗传效应)对优化结果的影响。为了比较在强遗传效应和弱遗传效应原则下所筛选出的显著性变量差异对最终优化结果的影响,根据弱遗传效应和以往研究的经验信息,调整了主效应和交互效应的先验信息,即pgamma1→c(1,1,0.5,1,0.1,0.1,0.3,0.1,0.3,0.1)。此时,利用式(10)重新计算其变量指示器的后验概率,根据其研究结果可知,主效应x3的后验概率将降低到0.062 9,因此在弱遗传效应原则下,可将其视为非显著性主效应,最终筛选出的显著性效应为x1,x2,x4,x1x4,x2x4。在此基础上,根据强、弱遗传效应所识别出的显著性变量的差异,利用本文所提方法对上述两种情形下的优化结果进行比较,其优化结果如表3所示。此外,本文还考虑在满足符合性概率不小于0.9的约束下,假设噪声因子的波动方差为0.1、运用传统的GLM进行非正态响应的稳健参数设计,其优化结果如表3所示。
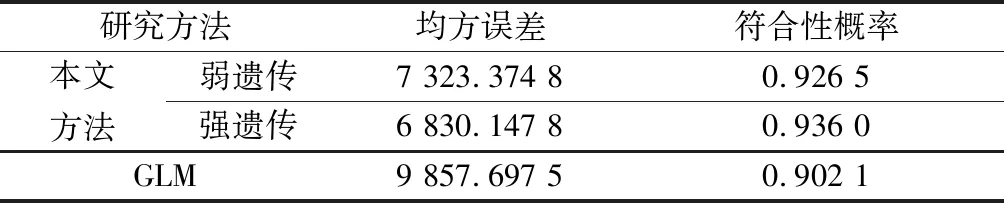
表3 不同研究方法的比较
从表3的研究结果可知,在强遗传效应的作用下,所获得的性能指标(如均方误差和符合性概率)均表现更优。此外,无论是在弱遗传效应或是强遗传效应下,本文所提方法在性能指标上均要比不考虑因子效应原则的传统GLM方法更为优越。需要特别指出的是,本文所提方法是建立在参数模拟抽样基础之上的,在实际应用中要注意对所获取的参数抽样值进行收敛性诊断,以确保根据其抽样值所构建的优化指标的稳健性和可靠性。
5 结束语
针对非正态响应稳健参数设计问题,本文利用贝叶斯建模与抽样技术构建了均方误差函数和符合性概率函数,提出了一种考虑噪声因子的稳健参数设计方法。案例研究结果也表明,噪声因子的波动变化对优化结果具有非常显著的影响,当噪声因子的方差变大时,输出响应的均方误差会随之变大,同时其符合性概率会随之逐步变小。因此,在实际产品或过程的质量设计中,全面地了解和掌握噪声因子的变化信息对提高产品或过程的质量设计水平是至关重要的。与以往方法比较而言,本文所提方法是在GLM的贝叶斯建模与优化框架下开展的相关研究工作,因此本文所提方法不仅适用于正态响应,也适用于更为广泛的指数族分布类型,如常见的Gamma分布、泊松分布等响应类型。此外,本文所提方法不仅考虑了噪声因子的波动变化对稳健参数设计优化结果的影响,而且还结合贝叶斯方法考虑了模型参数不确定性以及输出响应波动对非正态响应稳健参数设计优化结果的影响。
伴随着物联网、传感器技术的迅猛发展,在复杂产品或高端装备的制造过程中对噪声因子进行实时测量,然后利用统计与人工智能技术对所收集的质量数据进行分析已经成为当前亟待研究的重要课题,因此如何结合统计、大数据分析技术开展产品质量设计将是未来需要进一步深入研究的重要课题。