基于改进NSGA-Ⅱ的汽油机标定优化研究
2023-03-08康顺李自胜肖晓萍陈杰张楷尚伟
康顺,李自胜,肖晓萍,陈杰,张楷,尚伟
(1.西南科技大学制造科学与工程学院,四川 绵阳 621010;2.西南科技大学工程技术中心,四川 绵阳 621010;3.绵阳新晨动力机械有限公司,四川 绵阳 621000;4.西南交通大学机械工程学院,四川 成都 610031)
为使发动机在经济性、动力性及排放性上均处于最佳状态,需要各控制参数在不同工况下做出相应的改变。发动机标定的目的是找到合适的控制参数组合,最大限度地提高发动机性能与降低污染物排放[1]。发动机电控技术的发展极大地提高了发动机的经济性和排放性,但也导致了发动机控制参数的增加及参数间耦合性增强,发动机的标定工作也变得更加困难。传统的人工标定所需周期长,试验量大,已不能满足现代发动机的标定要求。为了提高标定效率,基于模型的标定方法被提出并成为近年来国内外学者研究的课题[2-3]。
基于模型的标定方法需要依据试验设计[4]获得有限数据,建立预测模型,进而优化发动机全工况下控制参数,工况点优化后,将不同工况点的参数组合在一起,同发动机转速和负载一起写入校准图(MAP)中。控制参数的优化可分为局部优化和全局优化。局部优化是通过预测模型对单个工况点进行优化,独立搜索控制参数的最佳组合[5],这是目前运用最广泛的方法。全局优化则全面考虑所有运行工况点,通过施加大量约束条件,并综合考虑不同的量级折中[6],对控制参数进行整体优化。全局优化是最全面的方法,但由于其局限性,并未得到广泛应用。
近年来,国内外学者对发动机预测模型与优化方法进行了研究并取得一系列的成果。Francesco等[7]、Martínez等[8]使用少量数据建立人工神经网络(ANN)模型并完成了发动机标定工作,但所建立的模型存在过拟合的风险。柴志刚等[9]基于克里格法(Kriging)生成模型预测发动机性能、排放等。张文[10]基于高斯过程建立油耗预测模型,并将优化问题转化为约束规划问题,实现了VVT参数的标定,但该研究仅针对油耗进行优化,并未考虑其他指标。Federico等[11]应用遗传算法(Genetic Algorithms,GA)快速有效地获得了更好的标定,但在局部优化后,仍需要人工决策生成校准图。Wong等[12]使用不同机器学习算法,包括极限学习机(Extreme Learning Machine,ELM)、最小二乘支持向量机(Least-Squares Support Vector Machine,LS-SVM)及径向基神经网络(RBFNN)创建数据驱动模型,并分别采用模拟退火(Simulated Annealing,SA)与粒子群算法(Particle Swarm Optimization,PSO)优化生物柴油发动机,试验表明:ELM在模型精度与训练时间上优于LS-SVM和RBFNN;PSO在适应度方面优于SA,但在局部优化中,其目标函数是各性能指标的加权和,各目标加权值的分配带有较大的主观性。张文[13]采用NSGA-Ⅱ对单个工况点进行局部优化,并采用人工插值法完成了VVT参数的标定,但求得的Pareto解分布并不均匀。
相较于人工标定方法,基于模型的标定方法优势明显,但也存在一些缺陷,如模型过拟合,优化目标单一及局部优化后需要人工决策生成校准图等。针对该问题,提出一种局部优化与校准图平滑步骤相结合的方法,建立基于高斯过程回归的发动机性能预测模型,改进NSGA-Ⅱ算法并用于发动机控制参数优化,自动生成平滑校准图获得标定结果。基于某3缸汽油机的台架数据,利用GT-Suite仿真环境验证了该方法的有效性。
1 发动机性能模型与工况点优化
1.1 发动机性能预测模型
1.1.1 高斯过程回归
高斯过程回归[14](Gaussian Process Regression,GPR)是由贝叶斯框架与统计学习方法相结合的非参数模型,它使用极大似然估计进行训练,并且其性质完全由其输入的均值函数m和协方差函数k决定。对于样本集合M={(xi,yi)|i=1,2,…n}(其中xi∈RD为输入向量,yi∈R为输出变量),构建回归模型:
y=f(x)+ε。
(1)

(2)
以及观测值y和预测值f*的联合先验分布:

(3)
式中:K(X,X)为训练集的协方差矩阵;K(x*,X)为预测点x*与训练集X之间的协方差矩阵;K(X,x*)=K(x*,X)T;K(x*,x*)为预测点自身的协方差;In为n维单位矩阵。
根据多元高斯联合分布可计算出预测值f*的后验分布:

(4)
即

(5)
核函数是GPR的核心,本研究选用具有平滑特性的平方指数函数[15](Squared Exponential,SE)作为核函数,其具体形式如下:

(6)
式中:l为方差尺度;σf为信号方差。参数集合θ={l,σf,σn}即为超参数,其中σn为噪声方差,一般采用极大似然法求得。首先建立训练样本条件概率,得负对数似然函数L(θ)=-logp(y|X,θ),并对超参数求偏导;然后采用共轭梯度法对偏导数进行最小化得到超参数得最优解。负对数似然函数及其对超参数的偏导数具体形式如下:
(7)
式中:C=Kn+σnIn;α=(K+σnIn)-1y。
1.1.2 模型变量与数据处理
将燃油消耗率(BSFC)、排放颗粒数量(PN)、NOx、CO及HC排放作为模型的输出,将表征工况的发动机转速、扭矩与控制参数进气VVT、排气VVT及点火角共同作为模型的输入。
在高斯过程回归模型建立过程中,输入参数与输出数值间差异较大,因此使用Z-score标准化方式对数据进行归一化处理,如式(8)。
(8)

1.1.3 模型建立
高斯过程回归预测建模步骤如下。
1)对试验数据进行归一化处理,并将数据集划分为训练集和测试集,其中训练集用于训练模型,测试集用于检验模型最终性能。
2)对GPR模型核函数的超参数进行优化,一般采用极大似然估计方法确定。首先确定训练样本的负对数似然函数,然后采用共轭梯度法对似然函数偏导数进行最小化以得到超参数最优解,具体操作见第1.1.1节。
3)按照如图1所示模型结构,利用高斯过程回归模型对测试样本进行预测。需要注意的是,并非只需要建一个模型,而是需要建5个模型,分别用于燃油消耗率(BSFC)、CO等5个性能及排放参数的预测。

图1 GPR模型结构
1.1.4 评价指标
为了验证模型的预测能力和准确性,引入了3个评价指标[16]。
1)决定系数(R2):
(9)
式中:yi,model为预测值;yi,truth为真实值(试验值);ymean为真实值的平均值。R2越大,模型精度越高。
2)相对平均绝对误差(RAAE):
(10)
RAAE的值越小,模型精度越高。
3)相对绝对最大误差(RMAE):
(11)
RMAE表示局部最大误差,RMAE的值越小,模型精度越高。
1.2 基于约束违反的改进NSGA-Ⅱ算法
发动机标定优化是多目标优化问题,需要在不同的目标之间进行折中。本研究对NSGA-Ⅱ进行改进并应用于发动机标定优化中。
1.2.1 基于高斯过程回归的NSGA-Ⅱ算法
基于精英策略的快速非支配排序遗传算法[17](Non-Dominated Sorting Genetic Algorithm-Ⅱ,NSGA-Ⅱ)是一种多目标优化算法,NSGA-Ⅱ在运行时需要多次评估目标值,自变量会在可行解范围内任意取值,因此需要事先对每个目标函数与约束条件建立预测模型,以模型代替试验台架,在算法运行过程中提供目标值。本研究优化目标是针对单个工况点,使其在其他排放指标(PN、CO及CH排放)的约束条件下尽可能地减少BSFC和NOx排放。将工况参数与需要标定的控制参数转化为适合NSGA-Ⅱ的数据输入,这里采用实数编码,编码长度为5。如图2,每个解都称为染色体(个体),每个控制参数与工况参数是一个基因,其中控制参数为等位基因,可进行交叉变异操作,工况参数为固定基因,不进行任何操作。

图2 以基因表示工况参数与控制参数
NSGA-Ⅱ算法主要环节如下。
1)初始化种群:设置工况参数不变,控制参数在可行范围内生成初始种群,个体如图2所示,种群大小为200。
2)父代种群经过选择、交叉和变异生成子代种群,并将两个种群合并为一个完整种群。
3)计算种群中的个体目标值及约束值,对个体进行非支配排序和拥挤度计算。其中个体目标值和约束值是通过GPR模型预测得到。
4)选择Pareto等级更高且拥挤度更大的个体组成下一代父代种群。
5)重复步骤2至步骤4,直至到达最大迭代数。最大迭代数设置为300。
通过在步骤2交叉操作中改进交叉算子及在步骤3中加入约束违反来对NSGA-Ⅱ进行改进。
1.2.2 改进NSGA-Ⅱ算法
针对NSGA-Ⅱ在发动机标定优化问题上解的分布性和收敛性较差问题,提出一种改进的NSGA-Ⅱ算法,在非支配排序中加入约束违反并引入混合交叉算子。
1)交叉算子的改进
NSGA-Ⅱ算法采用SBX算子,其搜索性能较差。针对这一缺陷,结合正态分布交叉(NDX)算子[18],提出一种混合交叉算子(NDX-SBX),在迭代初期NDX算子占较大权重,从而跳出局部最优解,在算法后期SBX算子占较大权重,能在小范围内搜索。(NDX-SBX)公式如式(12)所示。
(12)

2)添加约束违反
NSGA-Ⅱ在判断解的支配关系时,通常需要比较适应度与拥挤度。在解决多约束问题时,可采用约束违反来影响解的质量,从而保证解的多样性。在判断解X1优于解X2时,需满足以下条件:
(1)解X1为可行解,解X2为不可行解;
(2)解X1与解X2同为不可行解,但解X1约束违反程度小于解X2;
(3)解X1与解X2同为可行解,但解X1支配解X2。
1.3 校准图自动平滑
工况点标定优化后,需要人工决策生成校准图。针对这一缺陷,提出一种平滑校准图自动生成的方法。这里主要针对WLTC循环工况[19],使用基于时间权重的参考点和关键工况点(Key Point,KP)的标定优化结果,生成多张校准图,然后评估这些校准图的性能与平滑度,自动选取一些优秀的校准图。
1.3.1 基于时间权重的工况点计算
使用k-近邻聚类算法计算每个KP的时间权重,如图3所示,图中聚类了20个KP,每一工况点都与最近的KP相关联,每个KP用相应的大符号表示,与之相关联的工况点用相同颜色的小符号表示。使用3个权重最大的KP生成控制参数平面,分别是30 N·m@1 500 r/min,60 N·m@2 000 r/min,90 N·m@2 250 r/min。通过该平面以及剩余的17个KPs生成校准图。
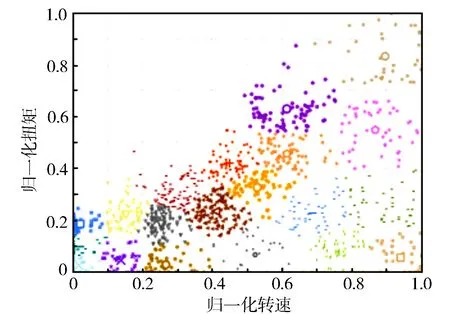
图3 WLTC运行工况聚类点
1.3.2 校准图创建
单个工况点的标定优化结果是一组Pareto解,一组Pareto解中包含多个解。在3个权重最大的KP中,分别选取一个解,并使用三点法生成不同控制参数的平面。不同控制参数的平面即关于发动机转速和扭矩的函数,如式(13):
zi=a×s+b×Tor+c。
(13)
式中:zi为第i个控制参数的值;s为发动机转速;Tor为扭矩;a,b,c为常量。点火角参数示例见图4。
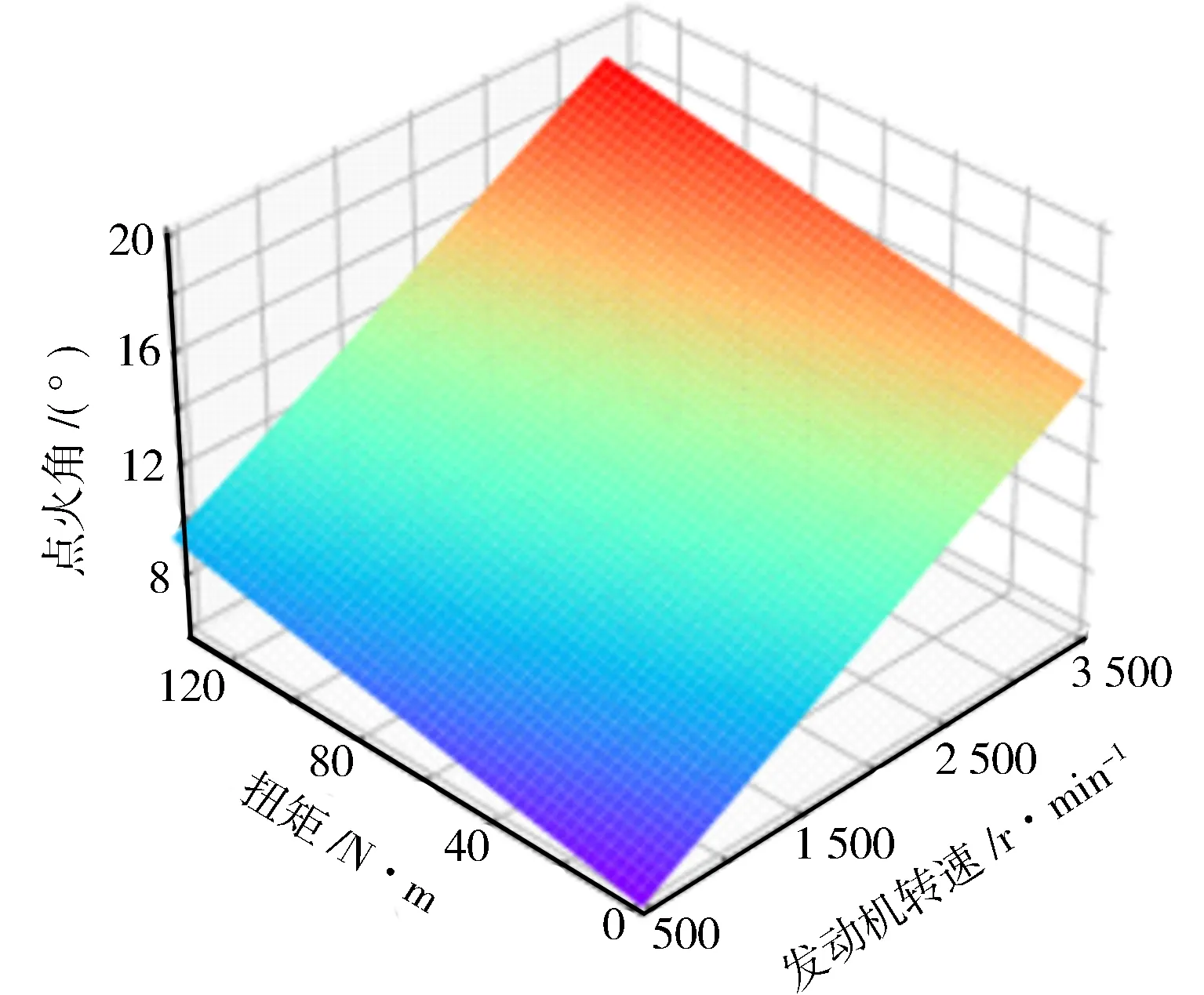
图4 点火角平面
平面确定之后,使用该平面与剩余的17个KP的每一个解,如式(14),选择与该平面映射点最接近的解,使得曲面变形最小。
ξz,i=min|pi-pi,ref|。
(14)
式中:pi为第i个工况点的解;pi,ref为第i个工况点映射到校准平面上的点;ξz,i为第i个工况点的解到映射点的距离。对点火角参数的校准见图5。
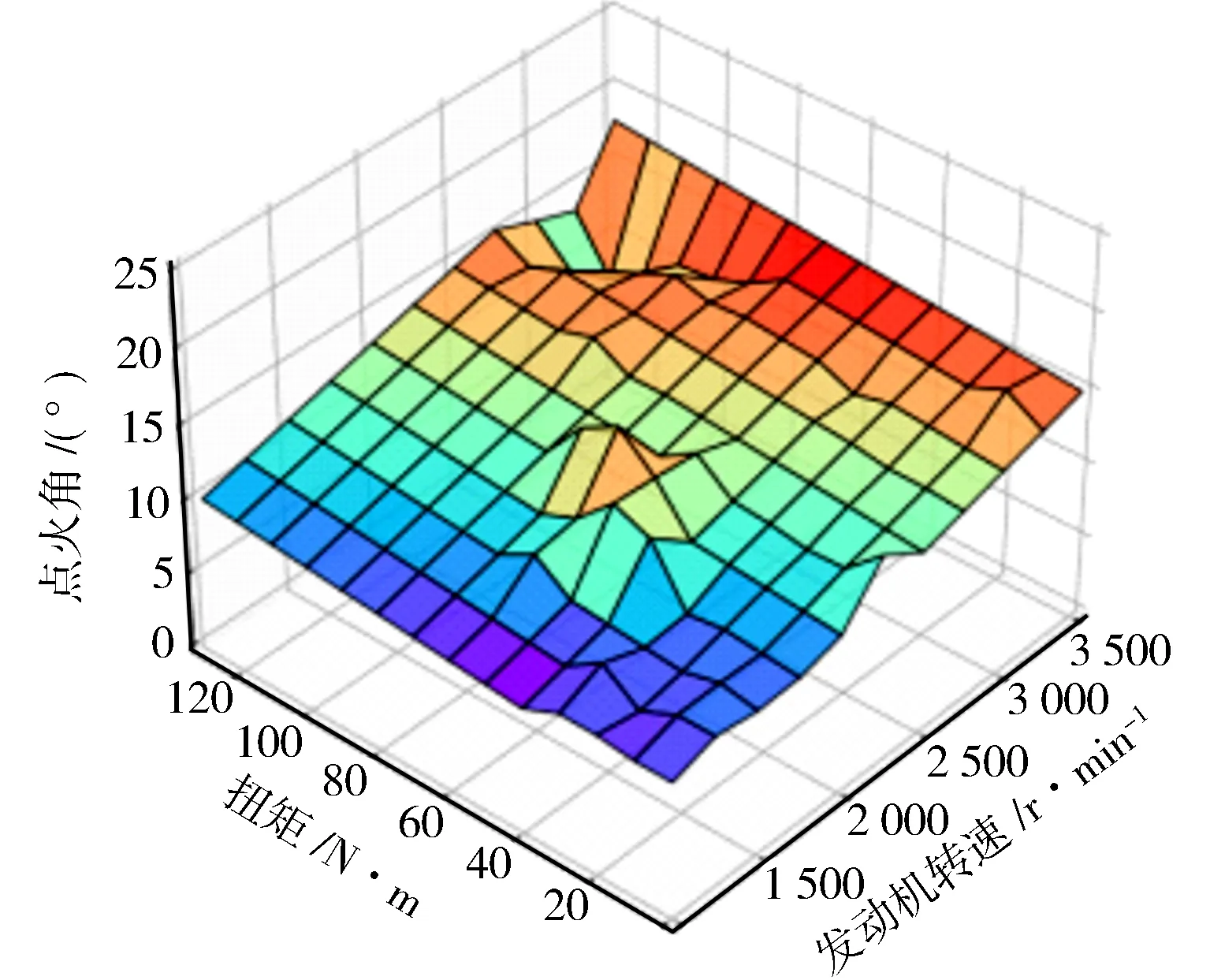
图5 点火角校准图
但发动机标定不只标定点火角参数,需要标定许多控制参数,如果点火角校准图足够平滑,但其他校准图却不平滑,则此次标定是失败的。所以,需要考虑所有控制参数,如式(15)所示:

(15)
式中:wi表示第i个控制参数的权重;nor(ξz,i)表示归一化偏差距离。由于每个控制参数的偏差不一样,所以需要进行归一化处理。对控制参数权重做出以下设置:进气VVT角、排气VVT角及基础点火角的权重分别为0.3,0.3及0.4。
1.3.3 平滑度评价指标
将校准图视作规则曲面,使用高斯曲率评估校准图的平滑度。高斯曲率[20]为曲面主曲率k1,k2的乘积,对于曲面上任意一点(x,y),都有其高斯曲率:

(16)
式中,高斯曲率使用一阶和二阶微分计算曲面的平滑度。校准图的总体平滑度用校准图中网格点的高斯曲率之和来表示,如式(17):
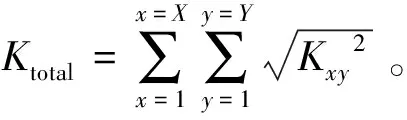
(17)
式中:Kxy为校准图上单个网格点的高斯曲率。
2 试验与分析
为验证所提方法的有效性,对所建预测模型的预测结果进行分析,将改进的NSGA-Ⅱ算法与原NSGA-Ⅱ算法进行比较,并将改进的NSGA-Ⅱ算法与平滑校准图自动生成方法结合,生成标定结果,比较该结果与人工标定结果的性能与平滑度。试验数据来源于某直列3缸汽油机,发动机的基本参数见表1。发动机所用预测模型为所建立的高斯过程回归模型。模型使用600组训练数据进行训练,120组测试数据进行测试。
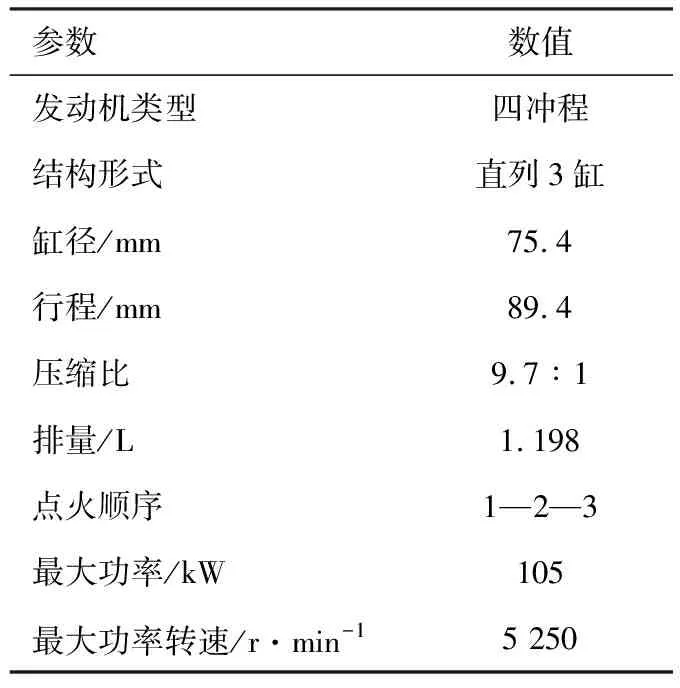
表1 发动机技术参数
2.1 预测模型及预测结果分析
表2列出用于建立性能及排放预测模型的部分原始数据,模型输入为转速、扭矩、进气VVT角、排气VVT角和点火角,输出分别为燃油消耗率、NOx排放、排放颗粒数量(PN)、CO排放及HC排放。表3列出各GPR模型训练完成后的最优超参数。图6示出测试数据在各模型的拟合效果,展示了所有预测点的发动机燃油消耗率、PN排放、NOx排放、CO排放及HC排放试验结果与预测结果的比较。从图6中预测点的分布可以看出,性能与排放参数的预测值与试验值具有很好的相关性。表4示出预测结果的多目标评价。从表4可以看出,GPR模型对5个参数的预测R2均大于0.96,表明这些模型具有良好的预测能力并能够用于后续多目标优化。
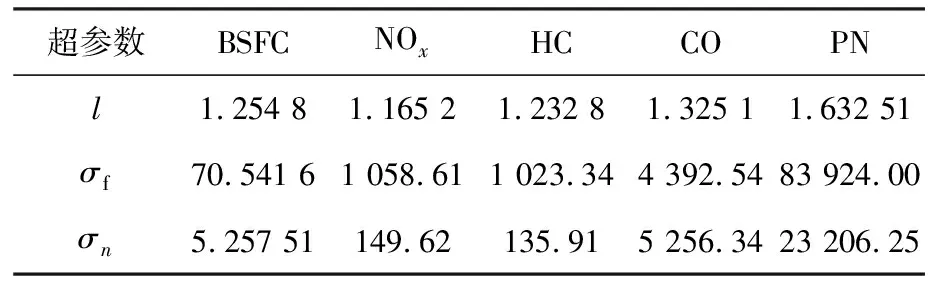
表3 训练完成后各模型超参数

图6 发动机性能与排放预测结果与试验结果比较

表4 模型多指标评价
2.2 改进算法收敛性和稳定性分析
为验证改进算法的有效性,采用两个评价指标来评估算法性能。
1)收敛性评价指标γ,即解集X中每个点到参考集X*的平均最小距离,γ越小,则算法的收敛性越好。
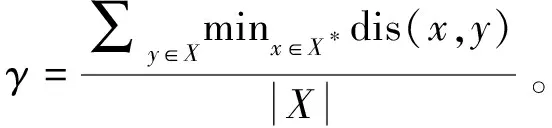
(18)
式中:X为算法获得的解集;X*为参考集;dis(x,y)为解集与参考集中点的距离。
2)多样性评价指标Δ,表示解集分布在前沿面上的均匀程度。

(19)

采用公开测试函数(ZDT1,ZDT2,ZDT3,ZDT4)进行测试,其中种群大小设置为100,最大迭代次数设置为250,其交叉算子γ1和变异算子γ2分别设置为2和5。
对每一基准函数测试20次,对每一指标取平均值(见表5)。两种算法在ZDT1与ZDT4测试函数对比分别如图7与图8所示。从表5可以看出,ENSGA-Ⅱ在保证收敛性的同时能够提高分布性,但在基准函数ZDT3中表现欠佳。总体来看,ENSGA-Ⅱ收敛性和分布性都有所提高。

表5 两种算法基准函数测试结果对比

图7 两种算法对ZDT1函数测试结果对比
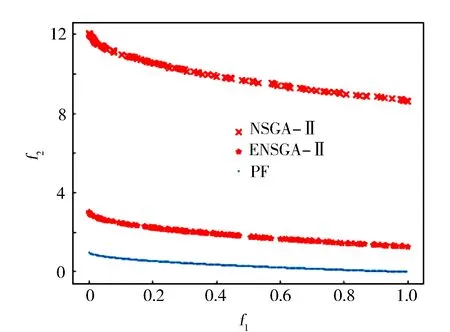
图8 两种算法对ZDT4函数测试结果对比
2.3 发动机标定优化实验与结果分析
在NSGA-Ⅱ算法中,非支配排序和拥挤度计算都是基于目标函数的结果,因此需将GPR模型嵌入到其中,将部分GPR模型作为目标函数,部分GPR模型作为约束条件,进行多目标优化。优化目标是针对单个工况点,使其在其他排放指标的约束条件下尽可能地减少燃油消耗量和NOx。目标函数定义如式(20):

(20)
式中:wnwe为进气VVT参数;wnwa为排气VVT参数;spark为点火角参数。定义约束条件如式(21):
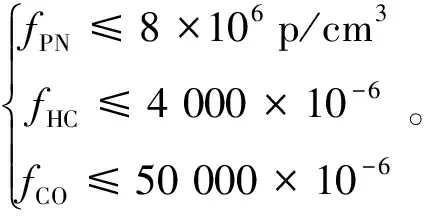
(21)
以90 N·m@2 250 r/min工况点为例,阐述试验步骤:
1)初始化种群。固定工况参数转速和扭矩不变,随机生成如[2 250,90,40,25,20]在可行解范围内个体,个体中5个参数分别代表转速、扭矩、进气VVT、排气VVT及点火角。其中种群数量为200。
2)选择、交叉和变异。选择策略采用二元锦标赛机制;交叉策略采用第1.2.2节中改进的交叉策略,交叉算子γ1=2,变异算子γ2=5。
3)计算种群中的个体目标值及约束值,然后对个体进行非支配排序和拥挤度计算。其目标函数即为BSFC模型(基于高斯过程回归建立BSFC模型)和NOx模型,约束条件为CO模型、HC模型及PN模型。
4)选择Pareto等级更高且拥挤度更大的个体组成下一代父代种群。
5)重复步骤2至步骤4,直至到达最大迭代数。设置最大迭代数为300。
GPR模型联合改进的NSGA-Ⅱ优化算法流程见图9。
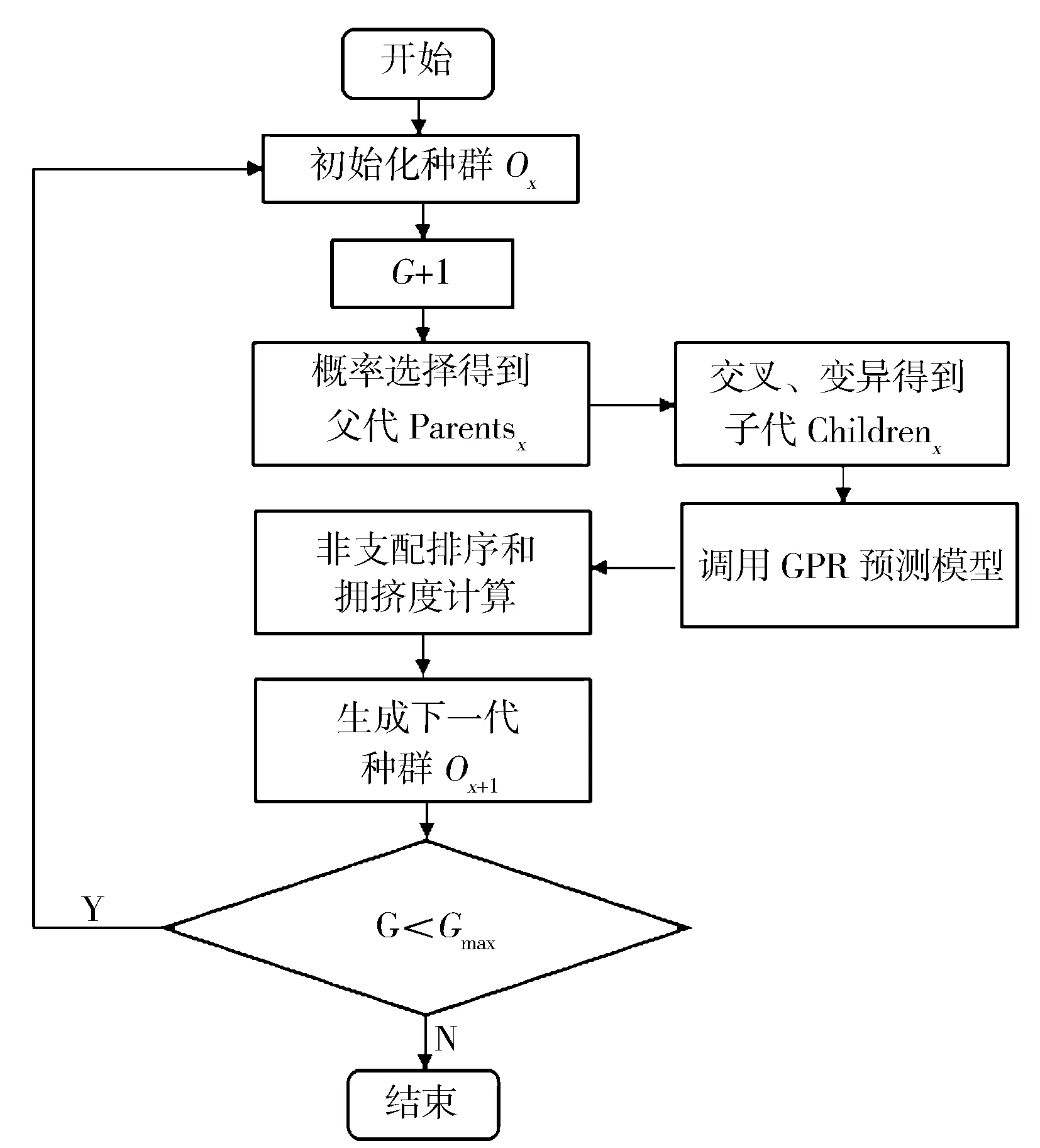
图9 GPR联合ENSGA-Ⅱ算法流程图
在CPU主频为2.9 GHz、内存为8 GB的计算机,Pycharm2022平台上用改进NSGA-Ⅱ进行发动机标定优化,设置种群数量为200,最大迭代次数为300,设置交叉算子γ1=2,变异算子γ2=5,优化一个工况点大概需要30 min。由于工况点数较多,这里仅展示个别工况点优化结果,图10与图11分别示出90 N·m@2 250 r/min与60 N·m@2 000 r/min工况点标定优化结果。从图10与图11中可以看出,Pareto解的分布性较好且生成了多组可行解(发动机控制参数),表明ENSGA-Ⅱ算法在发动机标定优化中具有较好的效果。
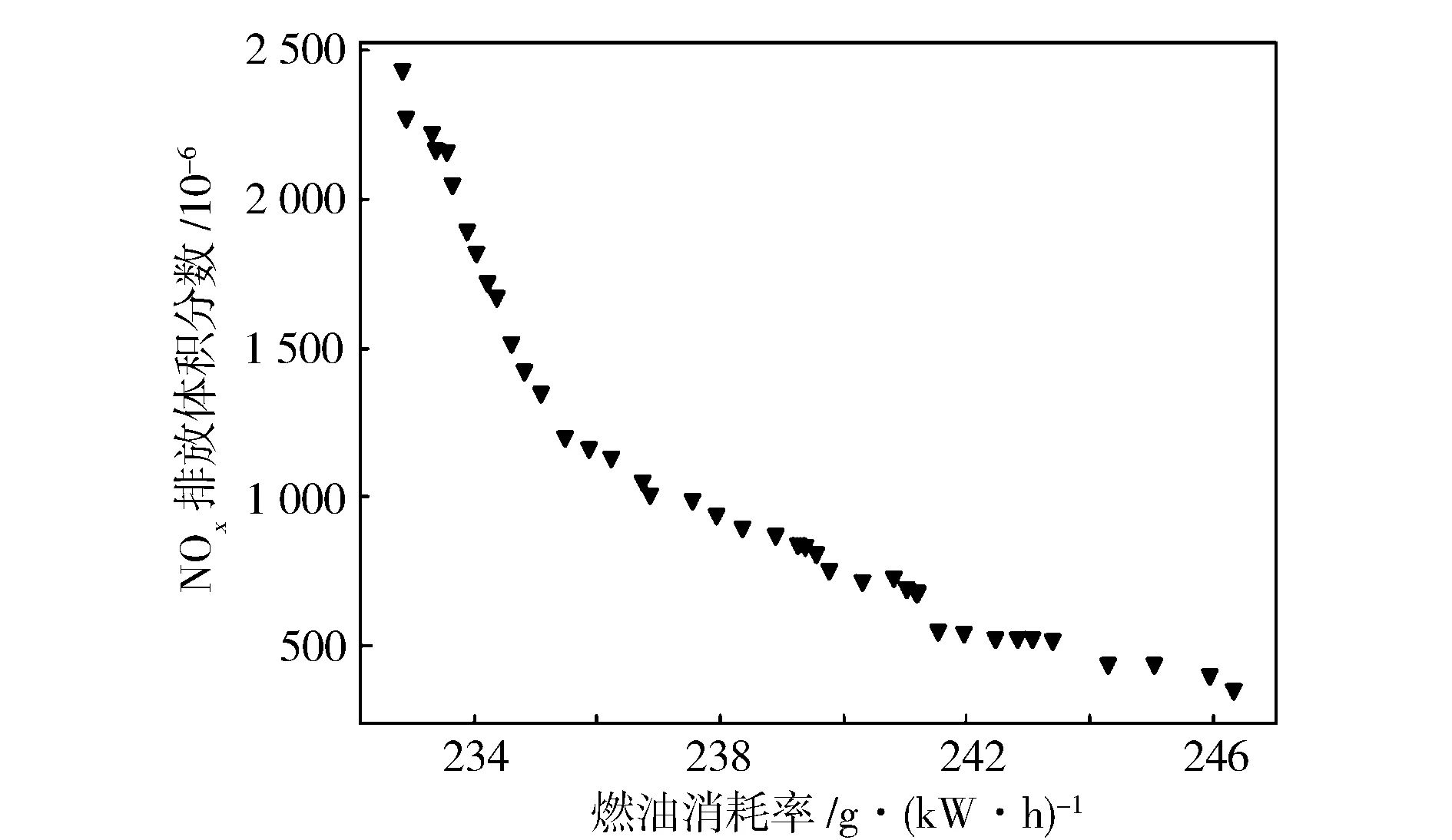
图10 90 N·m@2 250 r/min工况点标定优化结果
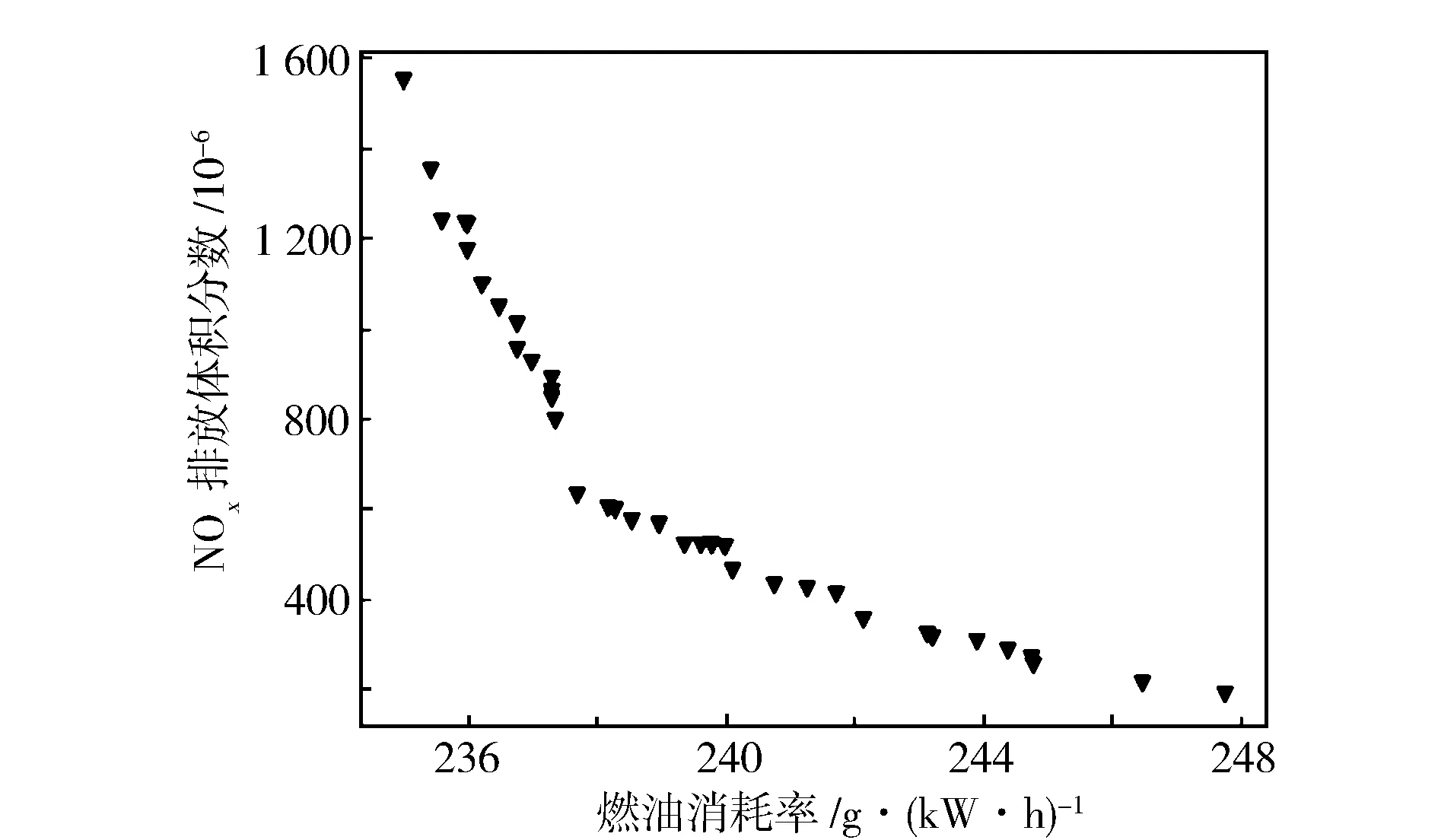
图11 60 N·m@2 000 r/min工况点标定优化结果
2.4 平滑度校准结果与比较
将关键工况点标定优化结果与平滑校准图自动生成的方法结合,标定结果见图12至图14,图12至图14分别为进气VVT角,排气VVT角以及点火角校准图。
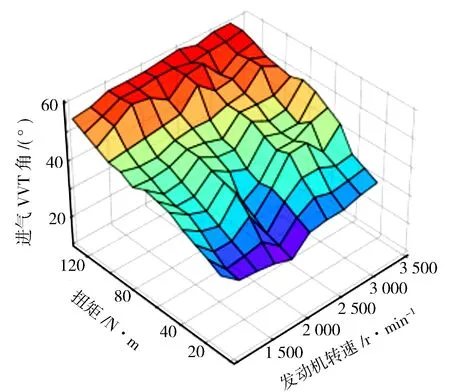
图12 进气VVT角校准图
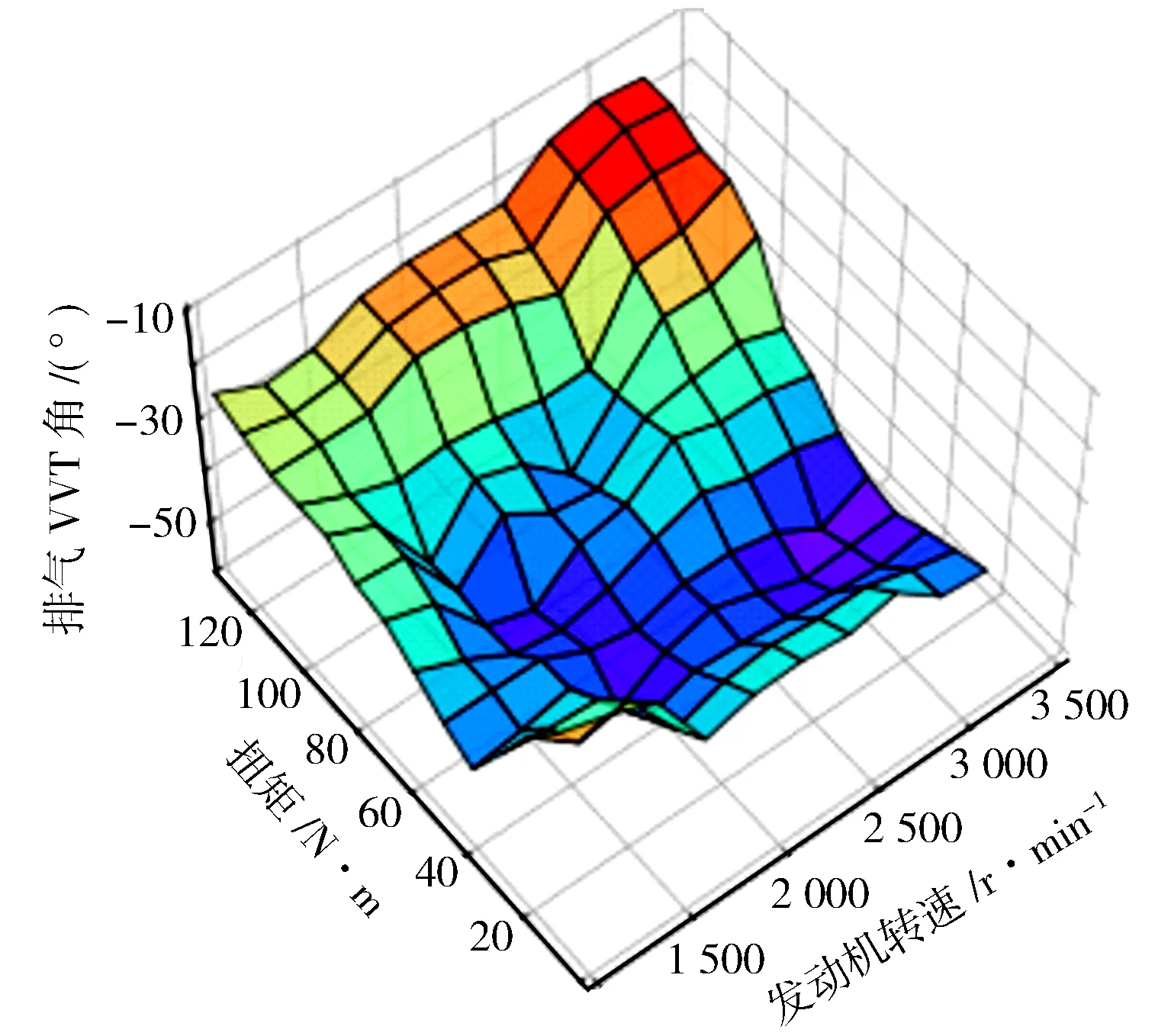
图13 排气VVT角校准图
将平滑度与性能相对均衡的校准图与人工校准图相对比,分析校准图平滑度及其性能。图15示出进气VVT,排气VVT以及基础点火角校准图与人工标定的校准图平滑度之间的比较。
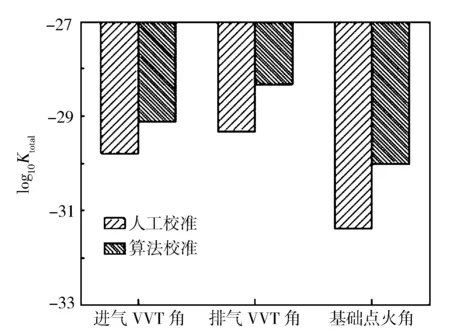
图15 平滑度比较
从图15可以看出,算法校准的校准图比人工校准的校准图更加平滑。为了评估校准图在发动机上的性能,利用建模软件GT-Suite建立车辆模型。传动系模块中的驾驶员模型通过PID控制根据期望和实际车速计算所需扭矩,然后调整制动踏板开度,以匹配模拟行驶车速,其中测试循环设置为WLTC。将人工标定的校准图与算法标定的校准图数据分别写入发动机MAP中。测试表明,在WLTC循环测试工况下,算法标定的校准图与人工标定的校准图相比,燃油消耗率降低1%,氮氧化物NOx排放降低了5%。
3 结束语
建立并使用GPR模型对燃油消耗率、NOx等性能和排放参数进行预测,并将GPR模型作为改进NSGA-Ⅱ算法的目标函数,进而求解发动机局部优化问题。将校准图平滑步骤与发动机局部优化结合在一起,生成多张校准图。通过采集某3缸汽油机的台架试验数据,并使用所提出的方法进行标定,试验结果表明,所建立的GPR模型R2均大于0.96,局部优化后的Pareto解更加均匀,生成的校准图在WLTC循环工况下测试,经济性和排放性比人工标定的更好。该方法可为减少发动机试验工作量提供参考。
