零耦合度部分运动解耦2T1R并联机构拓扑与性能研究
2023-03-07沈惠平朱晨阳
沈惠平 朱晨阳 李 菊 李 涛
(常州大学现代机构学研究中心, 常州 213016)
0 引言
三自由度两平移一转动并联机器人机构因驱动元件少、制造方便,在工业生产中具有较高实用价值[1],可用于空间物品的拾取操作、设备的姿态调整等[2]。国内外机构学研究人员对此类机构已进行广泛深入的研究。HUNT[3]于1983年设计了一种含2T1R及其奇生运动的3-DOF空间机构;KONG等[4]研究了含有球面支链或平行四边形子支链的2T1R空间机构;LIU等[5]提出一组运动学求解和构造均较为简单的2T1R型并联机构;刘艳敏[6]研究机构的综合方法,并优选了部分2T1R新机型。
机构位置求解是并联机构研究中最基础、最重要的问题之一[7],目前,大多数学者应用杆副法[8]、回路法[9],来建立机构输入-输出位置方程,但为得到一般的非线性一元高次方程,其数学推导、消元过程十分复杂。杨廷力[10]提出了机构运动学分析的序单开链法;沈惠平[11]提出了并联机构的拓扑特征运动学建模原理和方法,具有建模方便、计算量大大减少等优势。
动力学分析是保证机构动力学性能的前提。目前,机构的动力学分析方法主要有:虚功原理法[12-13]、拉格朗日法[14-15]、牛顿-欧拉法[16-17]、凯恩法[18-19]、动力学普遍方程[20]、Hamilton正则方程[21]等。拉格朗日法表现形式简单,但其计算量较大;凯恩法有较为简洁的计算方法,但对于力和力矩的分析相对匮乏[22];牛顿-欧拉法对于构件较多的机构受力分析较复杂,但在构建动力学模型时易求出运动副的约束反力[23];虚功原理同拉格朗日法一样,表现形式统一、计算量较大,且无法得到构件的约束反力。
基于虚功原理的序单开链法,以子运动链为基本单元,不仅能求出各驱动副的驱动力,还能求出子运动链(SKC)连接处的支反力,这对机械结构强度设计至关重要[24]。
本文根据基于方位特征(POC)方程并联机构拓扑设计理论[25],提出一种零耦合度、含一条混合支链的空间2T1R并联机构;对该机构进行拓扑特性和运动学分析;基于虚功原理的序单开链法建立该机构的逆向动力学模型,求解机构驱动力及部分运动副支反力;最后,对该机构应用于物流领域输送带之间物料的自动转运、卸料装置的应用场景,进行概念设计。
1 机构设计和分析
1.1 机构设计
1.1.1POC方程
串联、并联机构的POC集计算公式[25]为
(1)
(2)
式中MS——末端构件POC集
Mji——第i个运动副POC集
Mbi——第i条支链末端POC集
MPa——机构动平台POC集
1.1.2机构设计思路
大量研究表明,含有混合支链的并联机构一般具有耦合度低、输入-输出(部分)运动解耦、易得符号式位置正解等优点[11,24],且其运动学、刚度以及动力学综合性能也较好;且含1-DOF、2-DOF混合支链数目越多,机构输入-输出(部分)运动解耦性能越好,其运动学/动力学求解越容易,因为(1~2)-DOF混合支链本身的位姿易求得;另外,两支链并联机构具有结构简单、动平台转动能力强、干涉少等优点[25]。
根据上述思路,一方面,为设计具有“零耦合度且运动解耦”特性的并联机构,可以通过构造约束度为零、含部分驱动副且可独立求出其位置回路的混合支链,以实现设计目标;另一方面,本文设计的2T1R并联机构采用两支链的结构来实现,这意味着两条支链的末端运动输出最少都须包含2个平移(2T)和1个转动(1R)元素。
1.1.3支链设计
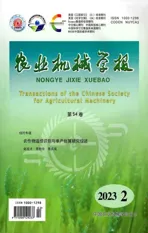
设计一个两滑块两平移空间并联机构,如图1a所示,它由分支1(P11‖R12‖R13‖R14)、分支2(P21⊥R22‖R23)并联而成,其中,两移动副P11和P21为重合共线,该机构简记为:2P-5R,为阐述方便,在静平台0上,建立坐标系OXYZ,Y轴平行于P11(或P21),Z轴平行于静平台0的法线。
图1 3-DOF 2T1R 机构的设计过程
由式(1)可知,分支1、2末端构件的POC集均为
由式(2)可知,输出构件2的POC集为
因此,输出构件2将产生垂直于R22轴线的平面(YOZ)内的两维移动(2T)。
在输出构件2的轴线上,直接串联一个转动副R24,如图1b所示,即转动副R24与R14共轴线(均平行于Y轴),则构成另一条混合支链,它将连接动平台1左端,由式(1)可知
MA=M2∪MR24=

(3)
(4)
使动平台1上转动副R35‖R24,且P31‖P11,从而设计出由混合支链、约束支链连接的2T1R并联机构[26],如图1d所示;由式(2)知,其动平台1的POC集为
因此,设计的并联机构具有沿YOZ平面内的两维移动和绕Y轴的一维转动。
1.2 拓扑分析
1.2.1机构自由度
(1)机构全周自由度计算公式[25]为
(5)

(6)
v=m-n+1
式中F——机构自由度
fi——第i个运动副自由度
m——运动副数
v——独立回路数
n——构件数
ξLj——第j个独立回路独立位移方程数

Mb(j+1)——前j+1条支链末端构件的POC集
第1回路为2P-5R空间机构,由式(6)得其独立位移方程数为
ξL1=dim.{Mb1∪Mb2}=

由式(5)得其自由度为
第2个回路由上述子并联机构、转动副R24及支链构成,由式(6)得其独立位移方程数为
ξL2=dim.{MA∪MB}=


因此,由式(5)得机构自由度
因此,当选取静平台0上移动副P11、P21、P31作为驱动副,该机构动平台1可实现YOZ平面内的两维平移以及绕Y轴的一维转动的输出运动。
1.2.2机构耦合度
由基于序单开链(SOC)的机构组成原理[25]知,机构均可划分为若干(SKC),而SKC又可分解为若干单开链(SOC),第j个SOCj的约束度为
(7)
式中mj——第j个SOCj运动副数
Ij——第j个SOCj驱动副数
则SKC耦合度κ为
(8)
1.2.1节已计算出ξL1=5、ξL2=5,因此,由式(7)可分别求出第1、2回路的单开链约束度为
易知,上述2个回路可分别独自构成子运动链,即SKC1及SKC2,由式(8)可得其耦合度为
因此,SKC1、SKC2可独立求解,从而可使机构求得符号式位置正解[26]。
至此,该机构主要拓扑性能(DOF、κ)已求出,并到达所期望的设计目标,其具有优点:①由低副组成,加工制造容易。②机构为零耦合度,因此具有符号式位置正解。③含两个子运动链且分别含有驱动副,因此具有部分运动解耦特性,从而有利于该机构运动学和动力学的建模与性能求解。
2 并联机构运动学分析
机构运动学模型如图2所示,静平台0上两个导轨之间距离为l8。静坐标系OXYZ的坐标原点O在导轨所在两条直线的中线上,Y轴方向平行于A1A2连线,Z轴平行于导轨所在平面的法线方向,并指向动平台1;动坐标系O′X′Y′Z′的原点位于动平台1的R24几何中心,X′、Y′轴分别重合、垂直于D2D3连线,而X轴、Z′轴方向均由右手定则确定。

图2 机构运动学模型
2.1 位置正解分析
已知点Ai(i=1,2,3)驱动副输入量y1、y2、y3,求解动平台1上点O′的位置(x,y,z)及动平台姿态角α。机构位置正解可由SKC1和SKC2分别求得。
(1)SKC1位置求解
易有A1=(l8/2,y1,0),A2=(l8/2,y2,0),B1=(l8/2,y1,l1),B2=(l8/2,y2,l1),D1=(l8/2,y1,z),C2=(l8/2,y1+2l3,z),D2=O′=(l8/2,y1+l3,z)。
由杆长约束lB2C2=l4得位置约束方程,并求得
(9)
(2)SKC2位置求解
易有:A3=(-l8/2,y3,0),B3=(-l8/2,y3,l1)。因两导轨道间距离为l8,故D2-D3-C4组成的回路在XOZ面上的投影关系如图3所示。
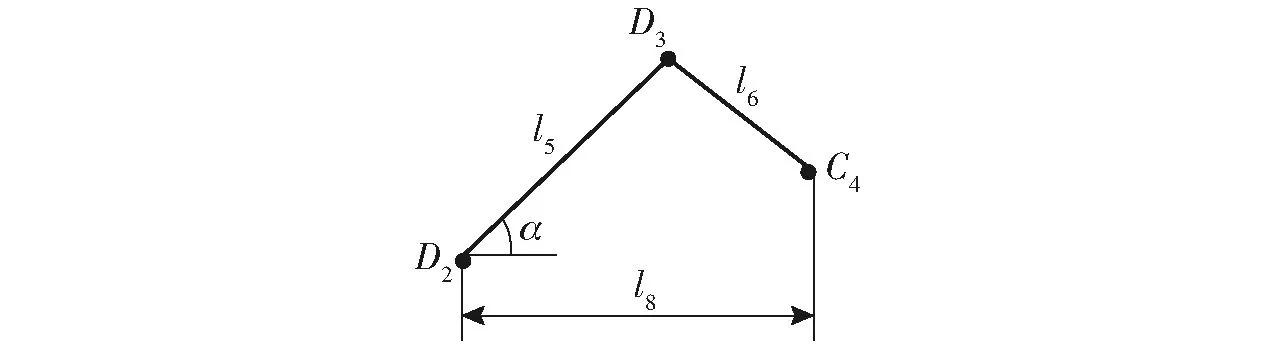
图3 D2-D3-C4在XOZ面上的投影关系
显然,有D3=(l8/2-l5cosα,y1+l3,z+l5sinα),C4=(-l8/2,y1+l3,ZC4),而C3=(-l8/2,y1+l3,ZC4-l7)。
(10)
由杆长约束lC3B3=l6得约束方程并解得
(11)

因此,由式(8)、(11)可得动平台(x,y,z)及姿态角α。
2.2 位置逆解分析
已知动平台1位置(x,y,z)及动平台姿态角α,求驱动副输入量y1、y2、y3。
由几何约束条件lB3C3=l6得到
根据式(9)、(11)可得
(12)

由式(12)可知,驱动副输入量y3、y2各有2组解,因此,此机构可有4组逆解。
2.3 正逆解实例验算
设机构结构参数为l1=100 mm,l2=220 mm,l3=150 mm,l4=440 mm,l5=600 mm,l6=320 mm,l7=80 mm,l8=600 mm。
设3个驱动副输入量y1、y2、y3分别为-340、50、60 mm。通过Matlab计算式(9)、(11)可得到6组位置正解,如表1所示。
将表1中序号1的数据代入式(12),可以求得4组位置逆解。如表2所示,其中序号1的逆解数值与求解正解时给定的3个驱动输入量一致。
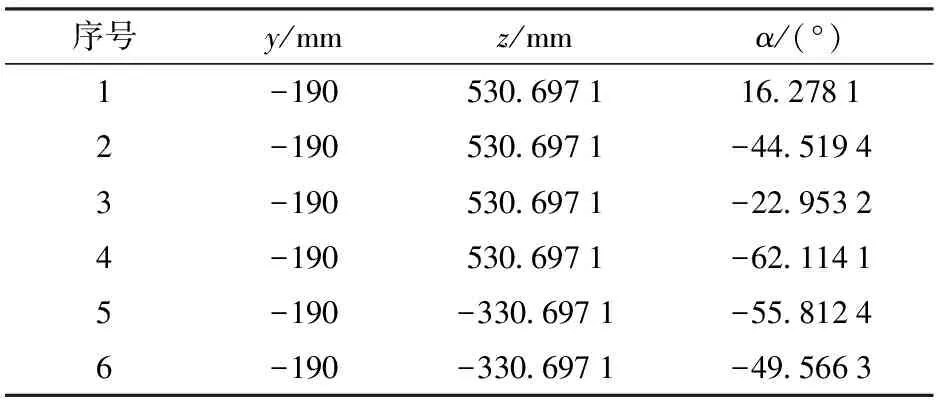
表1 位置正解
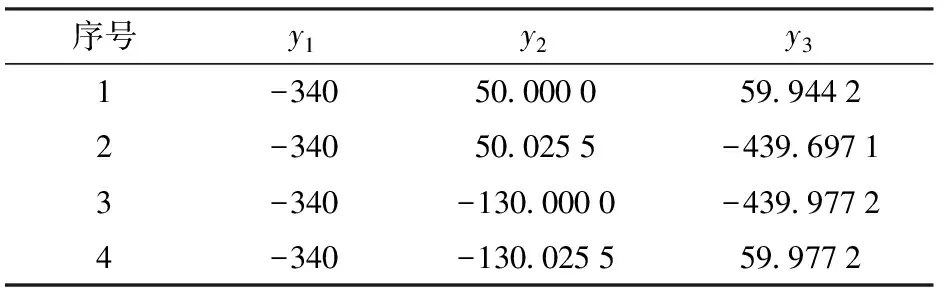
表2 位置逆解
3 工作空间
并联机构可达空间是指在考虑运动副转角范围、杆长不干涉情况下,末端执行器的工作区域,是衡量并联机器人性能的一个重要指标。
传统的工作空间计算是基于位置反解求得的点,由这些点组成的三维图即为该机构工作空间。
而本文机构具有符号式位置正解,因此,直接采用位置正解来计算工作空间,计算量少且工作空间边界计算准确。
为此,确定3个驱动副位置搜索范围为:-430 mm≤y1≤-320 mm,300 mm≤y2≤410 mm,-320 mm≤y3≤320 mm,搜索范围只需大于杆件活动范围即可。通过Matlab软件编程,得到该并联机构动平台质心点的三维工作空间如图4a所示,其XOZ、YOZ截面如图4b、4c所示。
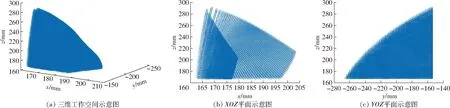
图4 机构动平台质心点工作空间
4 奇异性与速度分析
4.1 机构奇异性分析方法
(13)
其中
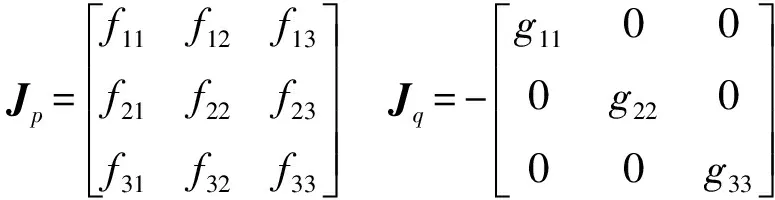
f11=-2(yD1-y)f12=0f13=0
f21=-2(yB2-yC2)f22=2(zB2-zC2)f23=0
f31=-2(yB3-yC3)f32=-2(zB3-zC3)

g11=-2(yD1-y)g22=-2(yC2-yB2)
g33=yC3-yB3
当机构不存在奇异位置时,Jp可逆,得
(14)
式(14)即为动平台基点输出速度。
为方便后续计算,现将动平台速度矩阵分解为移动矩阵和转动矩阵,即
由此,移动、转动矩阵与原矩阵的关系可表示为
其中
这样,动平台基点的移动、转动速度矩阵,与3个输入角之间的关系可分别表示为
将式(13)对时间t求导,得到动平台点O′加速度与输入加速度之间的映射关系为
(15)






4.2 奇异性分析
4.2.1输入奇异
当机构发生输入奇异时,机构的执行构件将失去某个方向的运动能力,此时,至少有1个运动链到达工作空间的边界。
当det(Jq)=0,机构将发生输入奇异,将方程的解集设为A,则A为
A={A1∪A2∪A3}
其中,Ai(i=1,2,3)为机构产生输入奇异时的3种情况:当A1={yD1=y}不满足构型要求,舍去。当A2={yC2=yB2},即点C2与点B2的y轴坐标相等,满足A2的三维构型如图5所示。当A3={yC3=yB3},即点C3与点B3的y轴坐标相等时,机构发生输入奇异,满足A3的三维构型如图6所示。

图5 A2的输入奇异位形
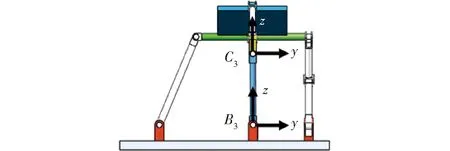
图6 A3的输入奇异位形
4.2.2输出奇异

当det(JP)=0时,机构发生输出奇异。由于Jq为下三角矩阵,故方程的解F={f11∪f22∪f33},其中,f11、f22不满足构型要求,舍去。
当f33=0,机构发生输出奇异,有两种情况:
第1种情况:当机构满足ZC3=ZB3时,如图6所示,即运动副C3和B3在水平方向平行时,机构无法继续运动,此时机构发生输出奇异,如图7所示。

图7 ZC3=ZB3的输出奇异位形
第2种情况:当动平台转动角满足
此时,机构将发生输出奇异。
4.2.3综合奇异
综合奇异即输入奇异与输出奇异同时发生。当det(JP)=det(Jq)时,机构发生综合奇异。此机构不存在综合奇异位置。
4.3 杆件速度与加速度
杆件AiBi速度与加速度关系为
VBi=VAi+ωi×(l1ci)
(16)
式中VAi——驱动副(Pi)线速度
ωi——驱动杆AiBi角速度
ci——杆AiBi单位矢量
因驱动副在机架上且仅为移动驱动,所以ωi=0。对式(16)求导,得点Bi加速度为
aBi=aAi
式中aAi——驱动副Pi1线加速度
于是,杆件AiBi质心速度、加速度分别为
(17)
杆件C1B1速度为
VC1=VB1+ω5×(l2C5)
(18)
两边叉乘C5可得
(19)
式中C5——杆件B1C1单位矢量
将式(18)两边对时间t求导,得
aC1=aB1+l2ε5×C5+l2ω5×(ω5×C5)
(20)
对式(20)两边叉乘C5,得杆件B1C1角加速度为
(21)
由式(18)、(20)得杆件B1C1质心速度、加速度为
(22)
杆件C1D1速度与加速度关系为
VD1=VC1+ω6×(l2C6)
(23)
两边叉乘C6,得
(24)
式中C6——杆件C1D1单位矢量
将式(23)两边对时间t求导,得
aD1=aC1+l2ε6×C6+l2ω6×(ω6×C6)
(25)
对式(25)两边叉乘C6,得杆件C1D1角加速度为
(26)
由式(23)、(25)得杆件C1D1质心速度与加速度为
(27)
杆件D1D2速度与加速度关系为
VD1=VC1aD1=aC1
则杆件D1D2质心速度、加速度为
(28)
杆件C3C4速度与加速度关系为
VC4=VC3
aC4=aC3
则杆件C3C4质心速度、加速度为
(29)
其余构件速度与加速度求法类似,故不再赘述,直接给出结果。
杆件B2C2、B3C3质心速度、加速度分别为
(30)
(31)
(32)
(33)
杆件C2D2、D3C4质心速度、加速度分别为
(34)
(35)
(36)
4.4 算例与仿真
给定3个驱动副的运动规律分别为
由式(14)、(15),通过Matlab计算得到动平台基点的理论速度和加速度,如图8、9所示。
图8 动平台理论速度曲线
图9 动平台理论加速度曲线
通过ADAMS仿真,得到动平台基点的速度与加速度曲线,分别如图10、11所示。
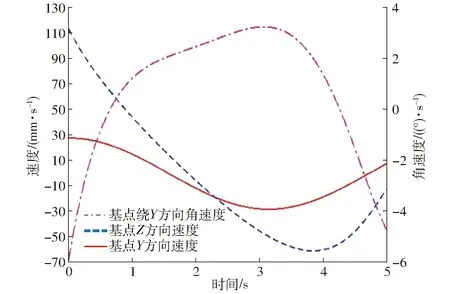
图10 动平台仿真速度曲线
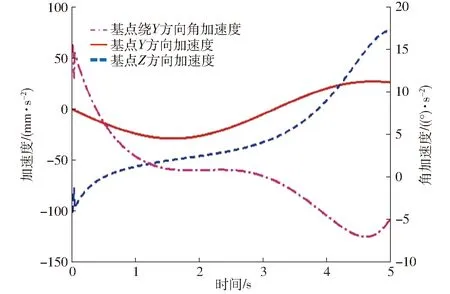
图11 动平台仿真加速度曲线
对比图8和图10,以及图9和图11,可知该机构速度、加速度理论值与仿真值一致,存在微小误差,验证了运动学模型的正确性。
5 动力学分析
5.1 基于虚功原理的序单开链法基本原理

5.2 部分构件雅可比矩阵
由于动平台在Y、Z方向上移动并绕Y方向转动,动平台上另一点D3的速度与O′速度不同,且无法直接表达出动平台质心点处的雅可比矩阵,故采用与第4节相同的方法求解以点D3为基点时动平台的雅可比矩阵。
(37)
式中β——杆件D3D2绕Y轴方向的夹角
由式(37)可得,动平台质心处、D3C4质心处的雅可比矩阵分别为
式中,JC4可由点C4速度直接表达出。
5.3 受力分析
作用于构件质心上的力有重力和惯性力,而力矩仅为惯性力矩。
对于动平台,作用在质心的力和力矩分别为

式中f′、τ——作用在动平台的外力和外力矩
R——在静坐标系{o}中动平台质心处的惯量矩阵,为旋转矩阵
Ip——动平台质心处惯量矩阵
对于各支链,假设重力是唯一的外力,则作用在各构件上的力和力矩分别为
Fi=mig-miamidi
Mi=-oIiεi-ωi×(oIiωi) (i=1,2,…,12)
式中oIi——在静坐标系{o}中各杆件质心处的惯量矩阵
5.4 动力学方程
对于SKC2,解除运动副D2处的约束,于是支反力FD2转换为未知外力,由虚功原理可得
(38)
在静坐标系{o}中,以杆D2D3为研究对象,并将力系向D3处简化,可得
(39)
对于SKC1,将支反力FD2视为未知外力,由虚功原理可得
(40)
由式(38)~(40)可得机构的驱动力F11、F21、F31,以及运动副D2处的支反力FD2。
5.5 数值仿真算例
机构各构件尺寸参数如表3所示。
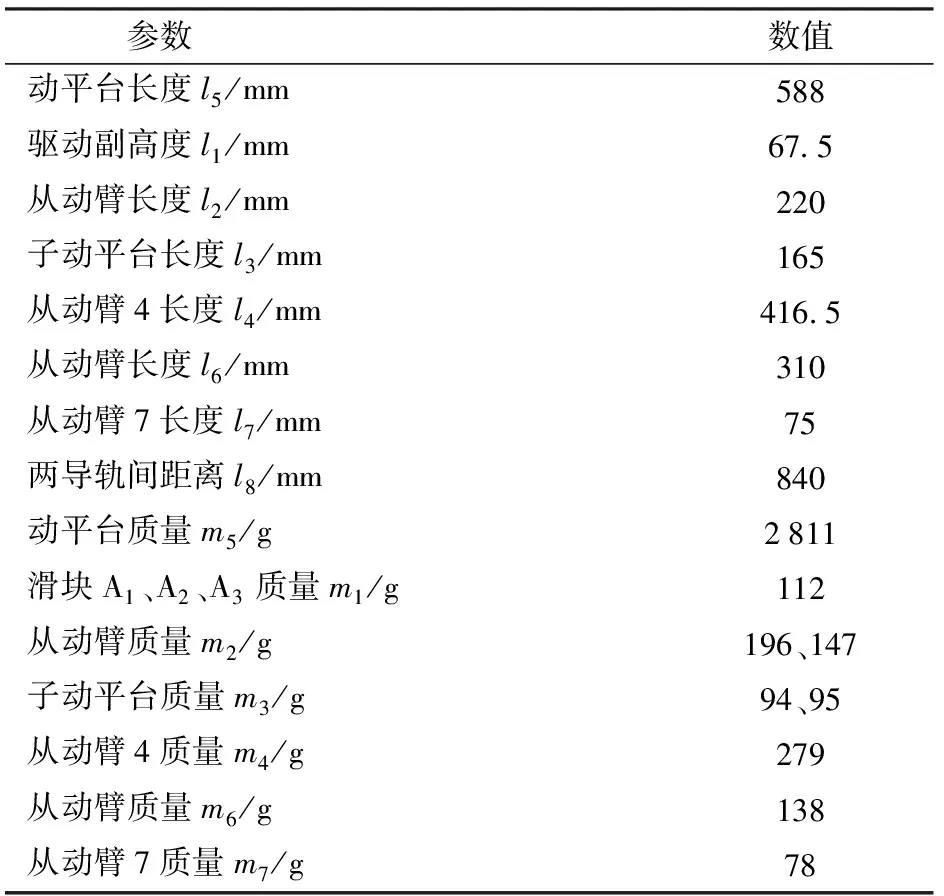
表3 2T1R并联机构尺寸参数
仅考虑动平台受沿Z轴方向的载荷。各构件均为形状规则、质量均匀的刚体,且驱动副采用与4.4节相同的运动规律,通过Matlab编程计算式(38)、(40),得驱动力F关于时间t的曲线,如图12a所示;将虚拟样机导入ADAMS中,并设定各构件的材料属性、运动副的约束类型,施加竖直向下的重力,选取仿真步长0.01 s,仿真时间5 s,动力学仿真曲线如图12b所示。
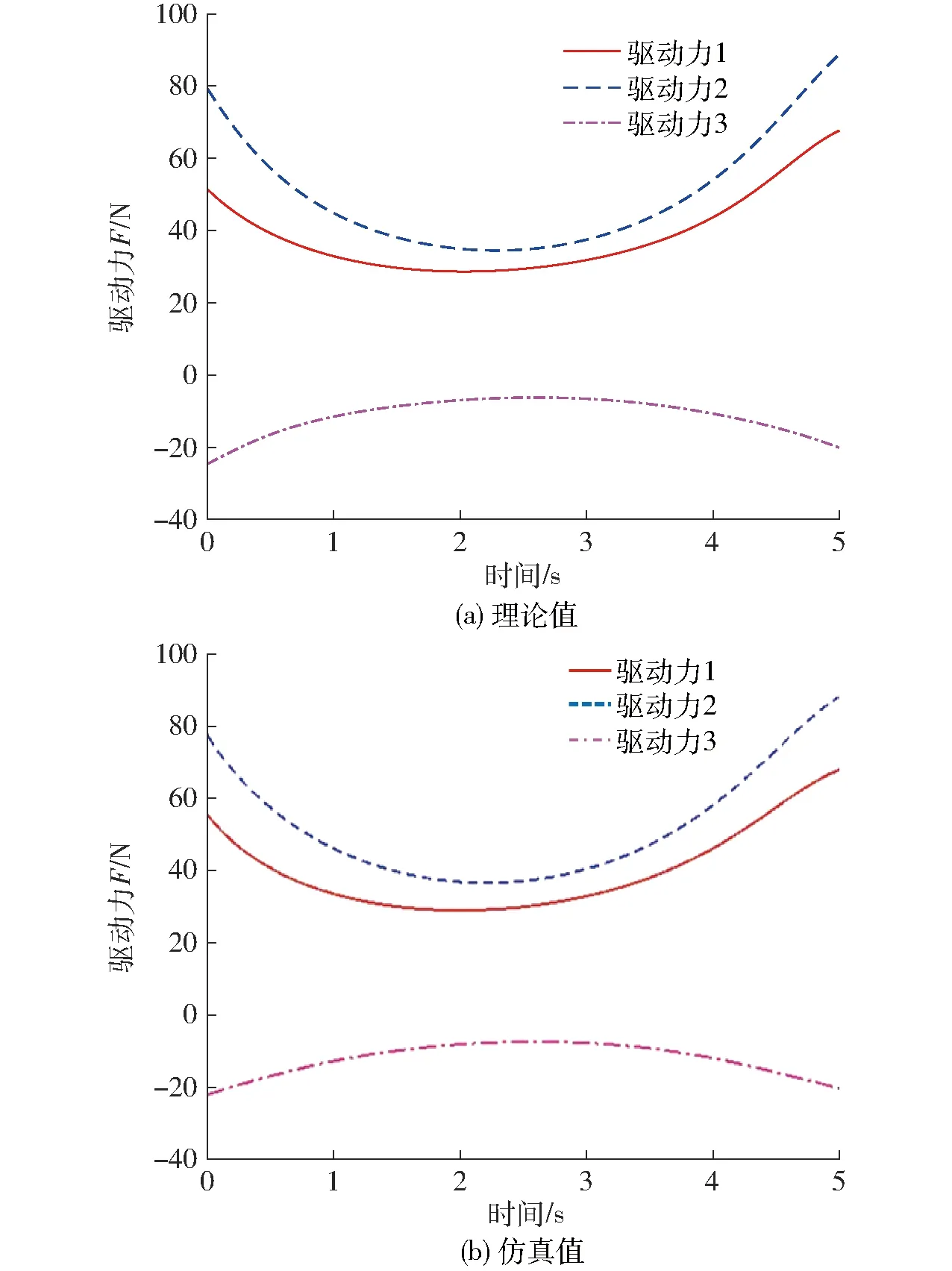
图12 2T1R并联机构驱动力曲线
而点D2支反力的理论值与仿真值如图13所示。
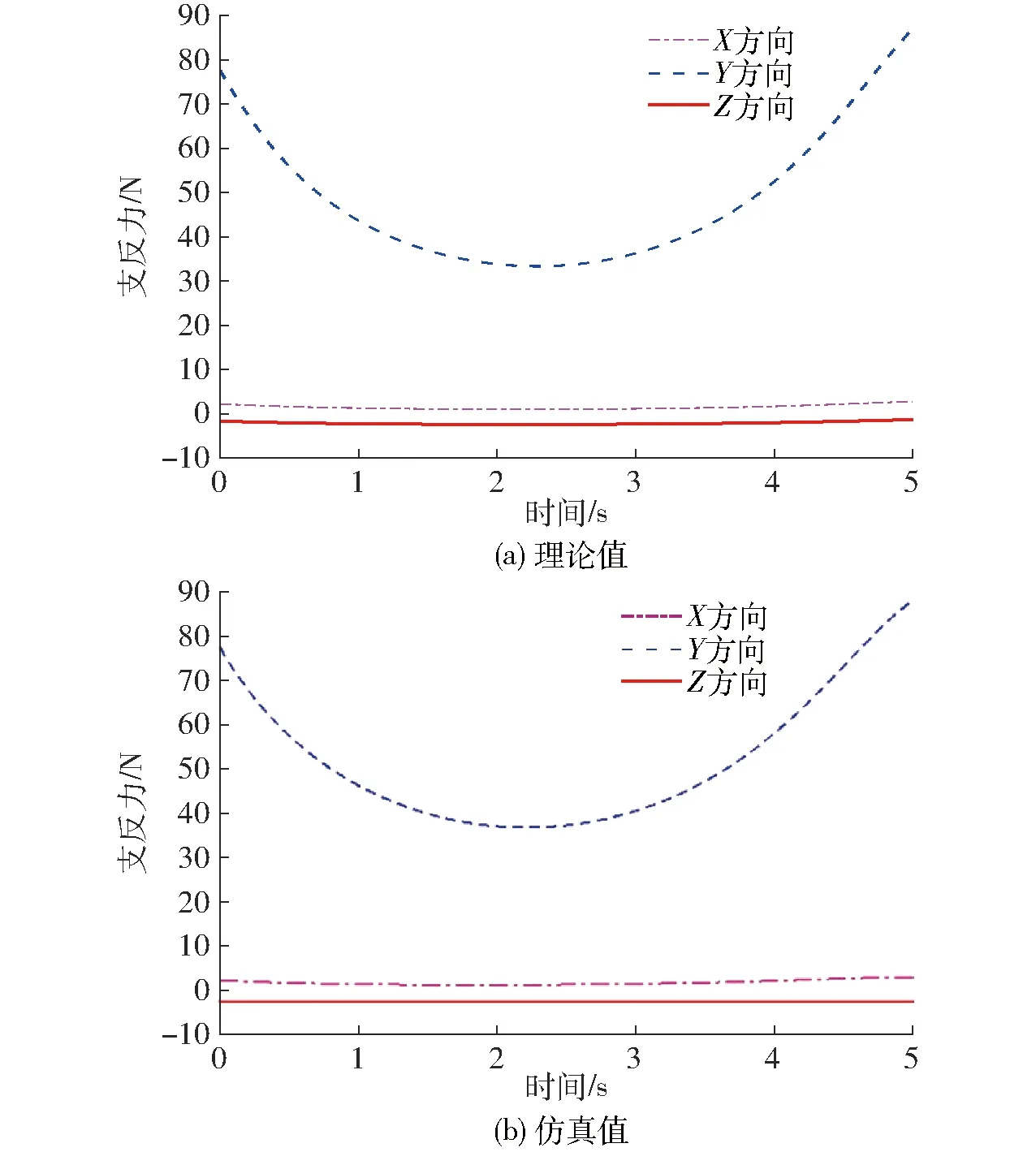
图13 点D2处支反力
由传统虚功原理可知

(i=1,2,…,12)
(41)
由式(41)可知,传统的虚功原理采用的是整体建模思想,而基于虚功原理的序单开链法则按照机构拓扑结构分解的顺序,分别建立各SKC的动力学模型,不仅建模思路清晰,而且使得机构的结构学、运动学以及动力学具有统一性。同时,可以得到不同SKC连接处运动副的支反力,有助于后续机构结构设计。
6 应用场景概念设计
该机构可用于物流领域两条平行布置、相距较远输送带(E、F)之间的物料的自动输送、转运和卸料,其平面示意图如图14a所示;该机构和输送带在空间的位置布置,以及送料、接料方式如图14b所示,图14c为其三维概念设计。
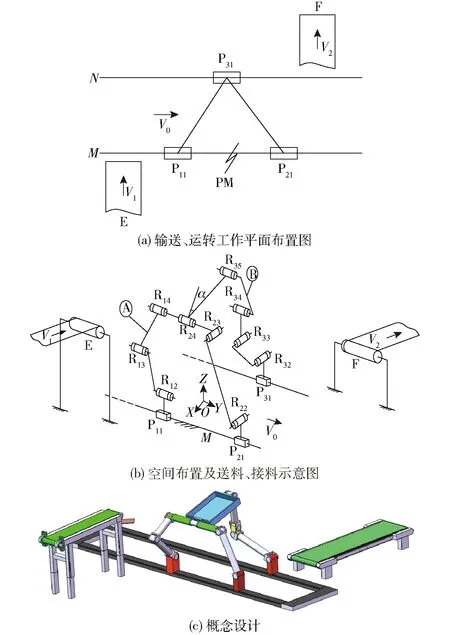
图14 用于物料输送与转运的3-DOF 2T1R并联机构
其工作原理是:当取静平台上的P11、P21和P31为主动副时,动平台1可实现YOZ平面内的两维平移以及绕R24轴线的一维转动,其中,两维平移(2T)能调整并联机构动平台1在Y、Z方向上的位移与输送带(E、F)的高度位置一致,而一维转动(1R)能使动平台1绕转动副R24轴线转动,从而使动平台1能适应自动接收来自输送带E上的物料,或将动平台1上的物料自动倾翻至输送带F上。
7 结论
(1)根据基于POC方程的并联机构拓扑结构设计理论与方法,提出了一种纯低副组成的、制造方便的3-DOF两平移一转动并联机构;拓扑分析表明,该机构由两个零耦合度的SKC组成,具有符号式位置正解,且具有输入-输出运动部分解耦性。
(2)求解了该机构的符号式位置正反解,分析了该机构的工作空间和奇异位置;并由雅可比矩阵推导出该机构动平台基点的加速度曲线,表明其变化连续、平稳。
(3)根据虚功原理的序单开链法,建立了该机构的逆向动力学模型,并求解了机构的驱动力以及SKC连接处运动副的支反力,表明所需驱动力变化平稳。
(4)对该机构应用于物流领域输送带之间物料的自动转运、卸料装置的应用场景,进行了概念设计。