基于面阵成像的末敏弹目标捕获方法研究
2023-03-06罗平李娜武军安杨永亮
罗平李娜,武军安,杨永亮,郭 锐
(南京理工大学智能弹药技术国防重点学科实验室,江苏 南京 210094)
0 引言
灵巧弹药是对地面装甲目标实施打击的有效手段,它通过探测器对视场中的信息进行实时采集与分析,能够自主完成目标探测、目标识别、最佳起爆点计算、引爆战斗部等任务,从而实现对目标的远距离精准打击[1-2]。随着研究的不断深入,弹药智能化技术朝着精度更高、作用距离更远、抗干扰能力更强以及更加智能化的方向发展[3-5],其中成像探测识别无疑是热门趋势。
末敏弹是灵巧弹药中用来打击装甲目标的典型弹种,它在弹道的末端,通过自身携带的探测器感知目标的存在,并引导其战斗部对准目标进行毁伤。一般而言,末敏弹为子母弹,每个母弹包含若干子弹,一次从高空投放,非常适合攻击大规模目标,是目前对付装甲目标集群的最有效武器。从目前国内外装备的末敏弹来看:美国的“SADAM”末敏弹采用8 mm主被动毫米波和13元线阵红外敏感器;德国的“SMART”末敏弹采用3 mm主被动毫米波和5元红外敏感器;法国的“ACED”末敏弹采用双色红外加毫米波辐射计;俄罗斯的“9M55K1”末敏弹选用了点源红外敏感器和毫米波辐射计;我国的末敏弹选用的是毫米波辐射计和双色红外[6-7]。这些探测方式容易受到软对抗手段的干扰[8-10]。随着现代技术发展,有学者对末敏弹线阵扫描探测方式进行了研究,如文献[11-12]对多元红外末敏弹目标识别方式进行了研究,但线元数量较少,难以准确实现目标分类;文献[13-15]则对末敏弹线阵探测成像识别方式进行了研究,但是线阵成像方式需要对数据进行拼接以及预处理,末敏弹扫描角抖动会让图像出现错位情况。同时,得益于成熟的图像目标检测算法[16-17]、高性能嵌入式平计算平台[18-19]以及探测器小型化技术,面阵成像探测是末敏弹后续发展的方向。
1 末敏弹面阵扫描成像原理
末敏弹在离地高度为H时,以扫描角β,转速ω,下落速度vz,对地面进行扫描,面阵探测器扫描过程如图1所示。

图1 末敏弹面阵探测Fig.1 Area array imaging detection of the terminal sensitive projectile
与传统点源探测器不同,面阵探测器扫描时直接形成图像,通过对图像处理来获取目标信息。针对面阵探测器中的红外和可见光两种形式,除了工作波段不同,其他参数选择都是相同的。其涉及参数主要有:水平分辨率M;垂直分辨率N;视场水平视场角ΩH;垂直视场角ΩV;帧率F。
1.1 运动参数
末敏弹下落过程中扫描面积不断减小,为提高扫描到目标的可能性,要求扫描间隔R需小于等于目标最小边长Lmin,对此需满足条件:
(1)
根据文献[1,13]的相关研究,选取扫描角β为30°。
1.2 探测器参数与运动参数
为保证扫描一周时相邻图像的连续性,要求水平视场角应大于等于相邻两帧图像的间隔,即:
(2)
1.3 探测器视场角
为表达出目标的真实形状,水平视场角ΩH和垂直视场角ΩV具有一定的比例关系,即:
(3)
由几何知识可知,面阵探测器在地面的敏感区域为梯形。梯形高为L,由面阵中心光轴与地面交点所在的梯形宽度W近似代替梯形的上下底边之和的一半,梯形面积记为s,即:
(4)
(5)
s=W·L
(6)
1.4 探测器分辨率
探测器的分辨率越高对目标的特征描述就会越精细,对分辨率的选取参考Johnson准则[20],为了保证末敏弹能够可靠的识别目标,需要满足条件:
(7)
式中:n为目标在最大尺寸方向上所占有的像素个数;D为目标的最大尺寸;ΩI为空间分辨率。
面阵探测器的参数选择需要同时满足以上所有条件。首先确定末敏弹扫描角为30°,此时探测器视场角决定了不同高度下的敏感区域大小,敏感区域面积应适中,面积过大会要求高分辨率同时造成资源浪费,面积过小会要求高帧率同时限制末敏弹探测优势,因此选择视场角为8°×6°。确定视场角后,为保证扫描一周时相邻图像的连续性,末敏弹转速越高,对帧率要求越高,根据式(2),末敏弹转速为4 rad/s时,帧率至少为180 Hz,同时考虑到探测器硬件制约,选择帧率为360 Hz。综上,选用视场为8°×6°,帧率为360 Hz的参数进行分析。
2 末敏弹面阵扫描捕获方法
2.1 末敏弹面阵扫描捕获流程
为方便分析,将地面投影的敏感区域由梯形近似为L×W的矩形,敏感区域面积随高度下降而减小,不同高度时敏感区域与目标大小对比如图2所示。
图2 不同高度下敏感区域与目标大小对比图Fig.2 Sensitive area versus target size at different heights
传统点源探测只能通过对目标与地面的辐射差异进行识别,并且无法获取目标的位置和尺寸信息,而面阵扫描则是直接得到图像,通过对图像进行目标识别获得具体的位置信息[13-15],识别能力和定位能力都能得到提高。以末敏弹转速4 rad/s,落速10 m/s为例,扫描间隔R=1.44 m,对于常规的3 m×6 m的装甲目标,从图2中可以看出,扫描时,图2(a),(b),(c)三种情况下尽管探测的图像中含有目标,但并不是可攻击目标,敏感区域不仅包含当前轨迹线,同时包含已经过的轨迹线和将要扫过的轨迹线,高度越高其包含的轨迹线越多,而威力轴只能对准当前轨迹线,不能兼顾作用整个区域,所以以往采用占空比作为捕获判断对系统并不适用,需要另行分析,具体流程如图3所示。
图3 末敏弹面阵扫描捕获流程图Fig.3 Flowchart of area array scanning acquisition method of terminal sensitive projectile
2.2 威力轴与敏感区域的位置关系

图4 面阵扫描简化俯视图Fig.4 Simplified top view of area array scanning
从图4中可以看出,为最大化利用面阵探测器成像的优势,威力轴需在整个敏感区域外,同时根据文献[21]研究,末敏弹滞后角度α不应该大于10°。而且不同于传统点源,目标处于一个较大的区域内,判断目标是否捕获取决于其是否与当前轨迹线有交集,所以末敏弹威力轴要瞄准的目标位置并不是相对固定的,即图中威力轴与目标夹角θ可变,这也意味着威力轴的起爆延时T并不是一个固定值。设获取图像的时间为t1,目标识别及信息处理时间为t2,然后经过距离调整延时t3后起爆战斗部,即理想情况下命中目标,起爆延时T需满足关系式:
(8)
由式(8)可知起爆延时T是随目标夹角θ和转速ω变化的范围值,理想情况下t1和t2都为固定值,t3由目标位置决定,但不可能为负值,这从物理意义上约束威力轴经过t1和t2的运动时间后仍然在原敏感区域外或在原敏感区域边缘,这就给了滞后角度α一个约束,由此可以选出满足条件的滞后角度:
(9)
(10)
理想的引战配合方案是先通过目标相对角度θ计算出总起爆延时T,再减去记录的已消耗的获取图像的时间t1和目标识别及信息处理时间t2,就得到距离调整延时t3,经过延时t3后起爆战斗部。
3 仿真对比及结果分析
对设计的末敏弹面阵扫描探测过程进行仿真,仿真中目标尺寸为3 m×6 m,目标初始位置等概率出现在扫描区域,即目标中心坐标在[-60 m,+60 m]内均匀分布,运动方向在[0,2π]内均匀分布;末敏弹落速为10 m/s,转速为4 rad/s;末敏弹摆动模型参考文献[22],取快频振幅为2°,慢频的振幅为3°。图5是目标运动速度为10 m/s时不同探测器的6次捕获成功情况示例。运动速度为10 m/s、15 m/s、20 m/s和25 m/s的目标各扫描120次,结果如表1所示。

表1 单元和面阵探测器对不同运动速度目标捕获结果Table 1 Capture results of single-element and plane array detector for targets with different motion speeds
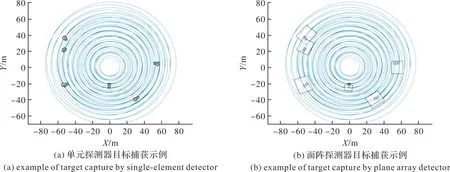
图5 单元和面阵探测器目标捕获示例Fig.5 Example of target capture by single-element and plane array detector
从表1中可以看出,对于10~25 m/s的运动目标,面阵探测器的捕获概率均高于单元探测器,同时面阵探测器的平均定位偏差都小于单元探测器。
4 结论
文中建立有伞末敏弹面阵扫描模型,研究面阵成像参数的匹配策略,提出了一种用于面阵探测对装甲目标捕获方法,最后通过仿真,验证了面阵探测条件下的引战配合策略的可行性和对点源探测器的优势。得到3点结论:
1)对建立的有伞末敏弹面阵扫描模型,分析了分辨率、视场角、帧率等参数相互之间的适配关系;
2)针对面阵探测器特点,设计了一种适用于面阵探测器的装甲目标捕获方法并对引战配合方式进行分析设计,提高了末敏弹捕获和定位能力;
3)仿真结果表明面阵探测器对运动速度在25 m/s及以下的装甲目标的捕获概率达到82%以上,其捕获和定位能力优于点源探测器。
面阵探测器在末敏弹上的应用理论上可行,但系统的实时性要求较高,对计算硬件平台、识别算法和引战配合算法均提出了更高的要求,对此也是下一步的研究重点与方向。
