形状记忆磁性润滑表面的制备及对超顺磁液滴的滑动操控
2023-02-25胡栋栋刘宇艳宋颖斌张东杰樊志敏谢志民成中军
胡栋栋, 来 华, 刘宇艳, 宋颖斌, 罗 欣, 张东杰,樊志敏, 谢志民, 成中军
(1. 哈尔滨工业大学化学化工学院, 城市水资源与环境国家重点实验室,2. 特种环境新型复合材料国家重点实验室, 哈尔滨 150001)
受到自然界中蜘蛛丝和猪笼草表面能够使液滴自发运输现象的启发, 人们开展了大量的关于液滴自发运输领域仿生功能材料的研究, 如今该领域已经成为一个研究热点. 受自然生物体表面梯度结构特征的启发, 基于设计类似的表面微结构梯度[1]、 表面化学组成梯度[2]以及表面电荷梯度[3]等多种手段, 研究人员报道了一系列液滴自运输仿生材料. Ju等[4]制备了具有梯度微结构的铜丝表面, 基于梯度结构表面产生的拉普拉斯压差作用展示了液滴从顶端向底端的自发运输; Sun等[3]制备了具有电荷梯度的超疏水表面, 液滴在表面静电力作用下实现了自发运动. 与常见的疏水、 亲水或者超疏水表面相比[5], 由低表面能液体填充的润滑表面因具有自愈合及低摩擦等优点而备受关注, 并且在很多领域得到了广泛应用, 如抗冰抗雾[6~8]、 自清洁[9,10]、 水滴收集[11~13]、 流体减阻[14]及热量转移[15,16]等. 通过在润滑表面上设计具有梯度特征的表面结构或表面化学来实现液滴自发运输的研究也备受关注[17].Ji等[18]制备了具有梯形梯度结构的铝合金润滑表面, 实现了液滴的定向自运输; Tang等[19]使用具有压电特性的晶体LiNbO3的不同晶面与液滴接触, 利用热弹性-压电相互作用产生了复杂的电势分布, 实现了液滴的自发定向运动; Zhang等[20]报道了一种水凝胶锥形阵列表面, 在锥形阵列毛细力的作用力下实现了液滴从锥形底部自发向上运输. 然而, 在所有这些表面上, 一旦液滴开始运动, 就很难使其停止. 事实上, 除了单向自发输运, 实现对液滴运动过程进行开关式启停调控同样重要, 相关研究也同样吸引了许多研究人员的兴趣[21~23]. Chen等[24]利用电场控制表面温度, 实现了对表面微观结构中的石蜡介于固/液两种相态间的可逆调节, 并且展示了液滴在表面上滑动过程的开关式控制; Guo等[25]制备了一种含磁性颗粒的润滑有机凝胶表面, 通过引入/去除磁场, 实现了对表面粗糙度的可逆控制, 同时也对液滴在表面的滑动过程展现了类似的启停调控; 基于偶氮苯基团的引入, Rao等[26]则报道了一种具有类似功能的紫外光响应润滑表面. 还有一些随温度变化[23,24,27~32]、 机械拉伸[33~35]及挤压变形[36,37]等方式的调控而做出类似功能响应的表面也相继得到了开发. 然而这些研究都只关注了液滴的启停控制问题, 如何将液滴自运输与开关式启停控制相结合, 实现对液滴运输过程更高程度的智能调控还依然少有报道.
磁性液滴在磁场作用下的动态控制因具有可远程操作及快速响应等优点而备受关注[38~41]. 应用超浸润表面可以避免一些诸如质量损失和交叉污染等传统液滴操控方面难以避免的问题, 因此基于超浸润表面对磁性液滴的操控研究引起了越来越多的关注[42~44]. Jiang等[45]利用高黏附聚苯乙烯超疏水膜展现了对磁性液滴的无损传输; Guo等[46]通过调节外加磁场的强度, 展现了对超疏水表面上磁性液滴滑动距离的精确控制; Rigoni等[47]证明了磁性滴液在磁性区域和非磁性区域周期性间隔排列的倾斜超润滑表面上的滑动受到周期性黏滞阻碍的作用. 最近, 本课题组通过外场作用实现了对超顺磁液滴在超疏水表面上滚动状态的原位调控[48]. 可以看出, 虽然相关研究已经取得了许多成果, 但针对磁性液滴自发定向输运的报道还极其少见, 尤其是关于同时兼具开关式启停控制的自发定向运输的报道.
基于形状记忆聚合物的形状记忆效应对表面浸润性的可逆调控研究最近吸引了许多研究人员的关注[49,50], 但目前相关研究往往只基于单一材料的形状记忆效应, 将形状记忆效应与其它材料的特征性能, 如磁性等相结合, 有望产生一些新的功能及应用, 如对磁性液滴运动的智能响应调控, 然而到目前为止, 相关研究报道还极少.
本文将磁性粒子与形状记忆聚合物复合, 通过设计渐变式形状, 设计了具有梯度特征的磁性基底材料, 并与润滑涂层相结合, 制备了一种磁性润滑表面. 在磁性梯度的作用下, 超顺磁液滴在表面上能够自发定向运动. 同时借助于材料形状记忆效应对表面区域形态进行可逆调控, 进一步实现了超顺磁液滴自发定向运动过程中的启停控制.
1 实验部分
1.1 试剂与仪器
环氧树脂(E44), 南通星辰合成材料有限公司; 聚醚胺(D230), 分析纯, 上海麦克林生化科技有限公司; 疏水气相纳米二氧化硅(SiO2)和二甲基硅油, 分析纯, 上海阿拉丁试剂有限公司; 超顺磁液体,杭州吉康新材料有限公司; 光敏树脂, 深圳市纵维立方科技有限公司; 钕铁硼(NdFeB)颗粒, 天津麦格昆磁有限公司.
2000D5型接触角测量仪(contact angle analyzer), 上海中晨数字技术设备有限公司; SU8010型扫描电子显微镜(SEM), 日本Hitachi公司; OLS3000型激光共聚焦显微镜(LSCM), 日本Olympus公司;600D型数码相机, 日本Canon公司; GZ07003620型充磁机, 上海先达电子磁气有限公司; TM8620型高斯计, 长沙天恒测控技术有限公司; Testo 865型红外热成像仪, 德国Testo公司.
1.2 实验过程
首先, 利用3D打印技术制备出具有凹型结构(最大深度H=20 mm、 宽度W=5 mm、 长度L=20 mm,半圆形弧线)的基材(25 mm×10 mm×25 mm), 如Scheme 1所示. 将3 g聚醚胺和5 g环氧树脂搅拌混合,再加入32 g NdFeB颗粒, 搅拌均匀. 然后将混合料填入基体上的凹坑中, 于80 ℃加热3 h; 待环氧树脂固化后, 将基材放入充磁机对NdFeB粒子进行磁化(充磁电压为800 V), 从而获得一个磁性区域深度逐渐变化的基底. 获得磁性梯度基底后, 再在该样品表面旋涂一层环氧预聚体, 于80 ℃保持约20 min, 然后将样品浸于100 mL二氧化硅的乙醇悬浮液中(疏水二氧化硅纳米颗粒约0.2 g), 浸泡20 min后取出. 待溶剂蒸发后, 于80 ℃下加热约3 h, 基材表面将覆盖一层疏水纳米二氧化硅. 二氧化硅粒子形成的纳米结构能够提供毛细作用, 有助于提高表面对润滑硅油的吸附[51,52]. 最后将润滑硅油滴在样品表面上, 并将表面直立放置以沥干多余的硅油, 最终完成样品的制备.
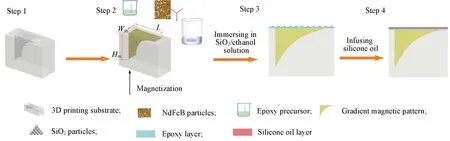
Scheme 1 Schematic illustration of the preparation process of the slippery surface
2 结果与讨论
2.1 润滑表面形貌及液滴滑动性能
图1(A)为NdFeB颗粒的SEM照片, 可以看出其平均尺寸约为3 μm. 将环氧树脂与NdFeB进行混合固化后, NdFeB颗粒和环氧树脂之间结合紧密[图1(B)]. 表面顶层SiO2粒子的分布状态如图1(C)所示, SiO2颗粒尺寸约为40 nm, 粒子间的团聚形成了一些团簇. 表面被硅油浸渍后, 产生了润滑效应.由图2(A)可见, 当将1个体积为8 μL的水滴放在表面上且表面处于一个很低的倾斜状态下(倾斜角大约为4°)时, 水滴在重力作用下可以轻易地沿着表面滑动, 表明所制备的表面与水滴间具有很低的黏附作用. 当表面处于水平状态时, 水滴则保持静止[图2(B)]. 与水滴不同的是, 当将1个超顺磁水滴(磁性Fe3O4粒子浓度为0.02 mol/L, 图S1,见本文支持信息)放置在表面上时, 即使该表面处于水平状态, 液滴依旧可以沿着表面从磁性区域浅的一端向磁性区域深的一端自发滑动[图2(C), Movie S1, 见本文支持信息], 并且没有任何残留(图S2, 见本文支持信息). 说明在所制备的表面上, 磁性液滴可以实现自发无损失定向运输.

Fig.1 Morphologies of NdFeB particles(A), NdFeB/Epoxy(B) and SiO2 layer(C)

Fig.2 A water droplet sliding on the slippery surface with the tilt angle of 4°(A) and 0°(B) and a magnetic droplet self-moving on the slippery surface with the tilt angle of 0°(C)
2.2 磁性形状记忆聚合物复合材料的磁性与形状记忆性能
从图S3(见本文支持信息)可以看出, 基底中NdFeB的分布存在一种梯度变化趋势, 其深度从一端向另一端逐渐增加. NdFeB的这种梯度分布使得表面存在NdFeB的区域两端形成了一个磁场强度差(NdFeB分布区域深的一端的磁场强度值减去NdFeB分布区域浅的一端的磁场强度值, ΔM). 为了获得最大的ΔM, 本文设计了多种不同的NdFeB分布形状, 并利用COMSOL有限元模拟软件, 对NdFeB颗粒组成的磁性区域所产生的磁场进行了模拟分析. 结果表明, 图S3所示弧形分布区域能够提供最大的ΔM(图S4, 见本文支持信息).

Fig.3 Statistic results of ΔM(A), shape fixing rate(B), shape recovey rate(C) of the surface of the samples with different mass fraction of NdFeB particles and statistic of needed time for shape recovery of the sample with NdFeB mass fraction of 80% at different temperature(D)
确定了NdFeB颗粒的分布形态后, 首先考察了形状记忆聚合物复合材料中NdFeB粒子的含量对ΔM的影响. 由图3(A)可见, 随着NdFeB颗粒含量的增加, 表面的ΔM逐渐增大. 当NdFeB质量分数为20%时, ΔM约为12 mT; 当NdFeB质量分数增加到80%时, ΔM则增加到约100 mT. 图3(B)和(C)分别示出了不同NdFeB含量的复合材料的形状固定率(Rf, %)和形状回复率(Rr, %), 可以看出, 随着NdFeB含量的增大, 复合材料的Rf和Rr都略有降低, 但仍然高于90%(形状记忆测试方法见图S5, 见本文支持信息). 较高的ΔM有利于磁性液滴的自发定向输运, 同时优异的形状记忆效应有助于对表面区域形态及液滴启停运动的控制, 因此综合两方面因素, 本文确定了NdFeB颗粒质量分数为80%时为最优, 所制备的梯度磁性区域可以提供最大的ΔM, 同时样品依然具有较高的Rf和Rr, 分别为94.5%和90.5%. 此外, 还对材料的形状回复过程进行了研究, 发现随着加热温度的提升, 材料形状回复速度加快[图3(D)].
由图4(A)可见, 本文制备的表面初始形态为平整状态, 其侧面轮廓数据也进一步说明了这一点[图4(D)]. 当表面在高于材料玻璃化转变温度(Tg, 图S6, 见本文支持信息)下被“T”型模具挤压并且冷却到室温后, 表面出现了一个深度(Hd)约为1 mm, 宽度(Wd)约为2.5 mm的凹型压痕[图4(B)和(E)]. 当对该表面进行加热后[图4(C)和(F)], 表面上的凹型压痕完全消失, 表面又恢复到初始的平整状态. 对比发现, 恢复后的表面比初始表面更加平滑. 这一变化可能是由于模具的挤压使得二氧化硅纳米颗粒形成的表面微结构发生了变形, 在外力作用下变得更加平整. 这些结果表明, 基于材料的形状记忆效应, 可以实现对表面区域形态的可逆调控.

Fig.4 Morphology(A—C) and sectional data(D, E) of the slippery surface at initial state(A, D), with a dent(B, E) and after the shape recovery process(C, F)
2.3 磁性液滴在表面上滑动状态的调控
由于本文制备的表面兼具磁场梯度特征和形状记忆性能, 通过这两种性能的相互配合, 实现了对磁性液滴在表面上定向输运与启停运动控制的有效结合(Movie S2, 见本文支持信息). 基于材料的形状记忆效应, 首先在表面中部位置通过压印赋予表面一个凹型压痕(Hd=1.2 mm, 压痕宽度Wd=3.3 mm). 由图5(A)可见, 在室温下, 当磁性液滴(8 μL, Fe3O4粒子浓度为0.02 mol/L)滴在该润滑表面的左端(NdFeB分布区域浅的一端)时, 磁性液滴会自发向NdFeB分布区域深的一端滑行. 当磁性液滴运动到中间凹型位置时, 会停止运动[图5(B)和(C)]. 打开加热器对该润滑表面进行加热, 随着表面温度的提升, 当温度超过磁性区域的Tg后, 表面的压痕将会逐步消失, 在这个过程中磁性液滴也从压痕中移出, 继续在表面上运动, 直至到达表面NdFeB分布区域最深的那一端[图5(D)~(F)]. 这一结果说明, 磁性液滴在该润滑表面上可实现自发运输, 同时其运动状态可以通过材料形状记忆效应进行响应性调节.
由图5可以看出, 表面的压痕可以实现对自发运动磁性液滴的截停, 要实现这一效应, 表面压痕的尺寸非常关键. 进一步考察了实现液滴截停效果所需压痕的最小深度随基底中NdFeB区域分布尺寸[如Hm,Wm, 图6(A)]以及压痕在磁性梯度区域中所处位置的变化关系[本研究中磁性液滴(8 μL,0.02 mol/L)、 压痕的宽度(Wd=0.8 mm)保持不变]. 由图6(B)可见, 随着Hm的增加, 拦截液滴所需压痕的深度也逐渐增加. 当Hm为10 mm时, 压痕所需的深度大约为1.0 mm; 当Hm增加到25 mm时, 压痕所需的深度增加到大约1.5 mm. 由图6(C)可见, 随着Wm的增加, 拦截液滴所需压痕的深度也逐渐增加.当Wm为2 mm时, 压痕所需的深度大约为1.0 mm; 当Wm增加到5 mm时, 压痕所需的深度逐渐增加到大约1.4 mm. 从图6(D)可以看出, 当压痕处于表面不同位置时, 所需要的深度也不一样. 当压痕与NdFeB区域最浅端的距离为5 mm时, 能够截停液滴所需深度大约为1.4 mm; 当距离增加到10 mm时,表面压痕所需的深度大约为1.2 mm; 当距离进一步增加到15 mm时, 表面压痕所需的深度大约为0.4mm, 明显随着距离的增大而呈现减小的趋势.

Fig.5 Photographs showing the self-moving of a magnetic droplet on the slippery surface
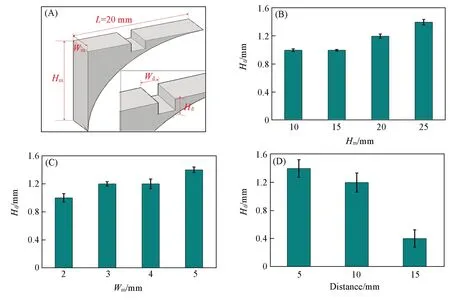
Fig.6 Schematic diagram of various dimensional variables(A) and the relationship between depth of dent and Hm(B), Wm(C) and the distance from the shallow end of magnetic regin(D)
2.4 机理解释
本文同时实现了对磁性液滴的定向自驱动运输和液滴滑动状态的调控. 为了解释该表面的这种智能可控性能, 对其内部机理进行了详细分析. 众所周知, NdFeB是一种硬磁性材料[48], NdFeB颗粒经过磁化后在其周围会产生一个微磁场. 本文中使用COMSOL有限元模拟软件, 对NdFeB颗粒组成的梯度磁性区域所产生的磁场进行了模拟分析. 因为NdFeB颗粒在表面下的分散呈现梯度变化, 这会在表面上形成一个不均匀的梯度磁场. 在NdFeB颗粒分布区域少的一端磁场强度很小, 而相反的一端则磁场强度较大, 从而形成梯度增加的趋势(图7). 实验测量结果与理论模拟结果一致: 随着NdFeB颗粒分布量的增加, 样品表面对应位置磁场强度逐渐增大(图S7, 见本文支持信息).
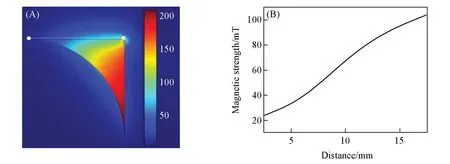
Fig.7 Morphology(A) and sectional data(B) of magnetic field distribution on the surface
Scheme 2(A)为超顺磁液滴在表面上受力分析示意图. 可见, 液滴内部的Fe3O4纳米颗粒的磁畴会在微磁场的作用下被磁化, 沿着磁场的方向定序排列, 也由此产生液滴和表面之间的磁力. 由于表面形成的是一个梯度磁场, 因此, 液滴会在磁力的作用下向磁场强度高的方向运动, 从而实现了定向自发运输.

Scheme 2 Schematic illustration of magnetic droplet self-moving on the surface without dents(A) and stopping on the surface with a dent(B)
当表面没有压痕时, 液滴和表面是一种液-液接触状态, 整体的阻力Fr很小. 阻力Fr不足以和磁力产生的驱动力Fd(磁力在水平方向上的分力)抗衡, 所以液滴会自发地在表面沿着磁场梯度的方向运动. 当表面上存在压痕时, 液滴会在重力和磁力在垂直于表面方向的分力的影响下滑落到凹坑处. 液滴要需要克服自身的重力才能滑动移出凹坑, 这就对液滴的滑行造成了新的阻力. 同时, 压痕的形成会导致其所在区域磁场强度的降低(图S8, 见本文支持信息), 造成了驱动力Fd的下降. 因此, 当液滴运动到压痕位置时, 整体阻力Fr上升, 驱动力Fd下降, 在两者的共同作用下, 液滴将停止滑动[Scheme 2(B)]. 当对表面进行加热后, 表面的形状回复, 压痕消失, 液滴与表面也会恢复原来的接触状态, 液滴移出压痕需要克服的阻力大大减弱. 此时Fd又占据了优势, 可以驱动液滴继续运动.
综上所述, 液滴在表面没有压痕的位置可以自发地定向运动, 在有压痕的位置会停止运动; 当对表面进行加热表面形状回复后, 压痕消失, 液滴又能继续运动. 可见, 本研究利用梯度微磁场和形状记忆效应同时实现了对磁性液滴的定向自驱动运输和液滴滑动状态的调控.
3 结 论
制备了一种具有磁性的超润滑表面, 并依靠梯度磁性区域和表面的形状记忆效应实现了对磁性液滴的自发运输及其滑动行为的调控. 该表面由具有梯度磁性区域的基底、 疏水SiO2纳米颗粒层和硅油润滑层组成. 梯度磁性区域可以在表面产生一个梯度微磁场, 驱动磁性液滴在润滑表面自发运输; 形状记忆效应可以使表面的区域形态发生变形和回复, 从而实现对磁性液滴自发运输过程中滑动状态的启停调控. 本研究为制备功能性超润湿表面提供了一种新的思路, 所制备的表面具有良好的定向自驱动性和滑动状态可控性, 在微反应、 生化检测、 液滴输送及液滴收集等方面具有应用潜力.
支持信息见http: //www.cjcu.jlu.edu.cn/CN/10.7503/20220442.
