基于光栅尺反馈的直线运动系统设计与实现
2023-02-24豆诗磊
豆诗磊,王 爽
(南京理工大学自动化学院,南京 210014)
0 引言
显微镜是观察微观世界不可缺少的工具,一般应用于生物、医药、微观粒子等观测。传统的显微镜操作主要是通过操作人员手动操作,存在精确操作难度大等缺点[1],无法满足人们对显微镜自动成像以及自动化测量的要求[2]。针对显微镜载物台的高精度电动位移控制,电控部分本文采用步进电机103H5205-5210、步进电机驱动器TMC5130、光栅尺MercuryⅡTM6510和处理器STM32F407组成的控制器,实现4通道直线运动的高精度闭环控制,从而实现显微镜载物台的高精度自动测量和精确定位。图1为系统实物图,图中仅接入一个通道的光栅尺检测和电机控制。

图1 系统实物图
针对直线运动控制应用系统[3-5],步进电机丢步、开环特性或丝杆自身误差往往会造成载物台位移不准确,本文直线运动控制系统中,通过光栅尺读头反馈的实际移动距离和目标位置比较的差值,再控制电机运动补偿这个差值,从而形成闭环运动,实现实时直线平台精确定位。本文主要介绍了控制系统的硬件和软件设计过程,控制系统原理图如图2所示,此系统具有交互性好、运动精度高的特点。
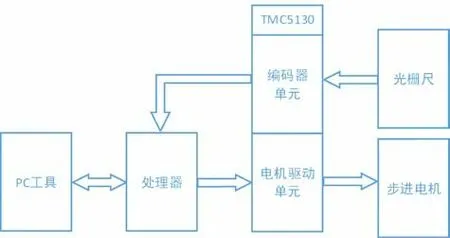
图2 系统原理框图
1 系统硬件设计
系统硬件总体框图如图3所示,主要包括STM32控制电路、步进电机驱动及编码器电路、步进电机、光栅位移传感器和CAN通信电路。STM32F407处理器通过SPI通信接口方式控制4路步进电路和光栅位移传感器检测,根据光栅反馈相对位置,反控步进电机,实现高精度闭环控制。CAN通信电路用于接收PC软件控制指令和反馈位移信息,进行人机交互。

图3 系统硬件总体框图
1.1 步进电机驱动及编码器电路
本系统采用TRINAMICs两相双极性步进电机驱动器TMC5130,通过外置外部晶体管,可实现高动态、高扭矩电机驱动。先进的spreadCycle和stealthChop斩波器,驱动器可绝对无噪音的运行,并实现最大效率和最佳电机扭矩控制。并且TMC5130为外部增量编码器提供编码器接口,可编程预分频器设置编码器分辨率以适应电机分辨率。
主控处理器STM32F407通过SPI方式与TM5130通信,REFL_STEP和REFL_DIR分别作为光栅尺左右限位信号输入,由于SD_MODE=0且SPI_MODE=1,诊断输出信号DIAG0和DIAG1分别输出REFL_STEP和REFL_DIR至主控处理器,通过中断方式判断光栅位移是否越界以及相关事件检测。DRV_ENN为驱动器使能输入,当该引脚被驱动到高电平时,所有电机输出为悬浮状态。ENCA和ENCB为编码器AB通道输入,用于检测AB相正交编码信号获取光栅尺输出脉冲信号数得到相对位移信息。ENCN为编码器N通道输入,用于光栅尺绝对零点参考点判断,本文中使用的光栅尺反馈的是相对位移数据,故需进行归零位处理。CLK作为驱动芯片时钟输入。OA1/OA2和OB1/OB2分别为电机线圈A和B输出控制信号。TM5130驱动电路如图4所示。

图4 TM5130驱动电路
1.2 步进电机
本系统采用Sanyo Denki直流步进电机103H5205-5210,双极,单极步进,步进角度为1.8°,电源电压为24 V,额定电流为1 A,最大转矩为0.265 N·m[6]。
1.3 光栅位移传感器
本系统采用MercuryⅡTM6510光栅,线性分辨率20μm,可编程内插参数从x4到x16384,A-quad-B输出,带粘贴式光学零位和左/右限位,以及警报功能。系统使用光栅内插参数默认为x400,即分辨率为50nm/count。使用需要根据其规格书进行安装,左右限位标记条和绝对零点标记条安装完成后需要使用SmartPrecisionTMAlignment Tool进行校准[5-6],图5为光栅尺零位和左/右限位校准界面。

图5 为光栅尺校准界面
图6为光栅尺输出的编码器A、B、N相信号,送到TMC5130获取光栅尺零点位置和相对位移信息。

图6 光栅尺信号输出
1.4 Can通信电路
本系统通过can接口方式通信,方便控制总线挂载新节点,并且can总线具有很强的抗干扰性和数据传输距离远特点。图7为can接收器电路。
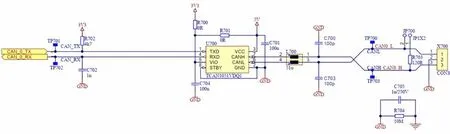
图7 CAN收发器电路
2 系统软件设计
本文系统中,软件设计主要包括TMC5130的SPI配置和闭环控制逻辑,步进电机驱动器TMC5130配置主要包括步进电机控制配置、编码器配置、中断检测配置。闭环控制逻辑负责自动归零、位移补偿等。
2.1 TMC5130配置
2.1.1 编码器配置
本系统中,步进角度为1.8°,设置TMC5130寄存器CHOPCONF(0x6C)中MRES细分为256微步,即步进电机转一圈,电机步进数CNTm为:
丝杠的导程为4 mm,光栅线性分辨率为20μm,内插参数为×400,即步进电机转1圈,光栅尺输出AB相脉冲数CNTe为:
TMC5130编码器因子=FSC*USC/encoder resolution,FSC=200(360°/1.8°),USC=256微步,encoder resolution为电机转一圈时光栅尺输出AB脉冲数,故
则TMC5130寄存器ENC_CONST=0×216+0.64×10 000=6 400,TMC5130编码器相关寄存器0x38、0x39、0x3A设置如图8所示。

图8 TMC5130编码器设置
2.1.2 中断检测配置
防止电机转动超出光栅尺量程,本系统增加光栅尺左右限位检测,一旦进入左右限位段,立即停止电机转动,并且在限位段内禁止向非量程区域移动。结合硬件原理图,系统通过DIAG0输出左右限位和N事件中断信号,提高事件响应及时性。TMC5130中断检测事件通过设置寄存器0x00的bit7(diag0_step)为1,如图9所示。

图9 TMC5130中断检测事件设置
STM32F407中断检测管脚interupt_out(图4)检测到TMC5130中断事件后,需要判断事件类型,如图10所示,事件类型可通过读取事件所在寄存器进行判别,图11(a)是N事件判别,图11(b)是左右限位事件判别。

图10 DIAG0事件输出

图11 事件判别
2.1.3 电机控制配置
STM32F407通过SPI数据配置TMC5130支持步进和方向模式,12 mHz时钟,配置小于30 r/min运行stealthChop及大于30 r/min运行spreadCycle的斩波器参数,并且使能并初始化运动控制器,内部斜坡发生器控制电机运行,如图12所示。由于电机运动速度太快会导致光栅尺丢帧,所以系统中设置的电机加/减速度和速度最大值设置的阀值偏小,这也满足显微镜载物台对速度的要求。

图12 TMC5130电机运行配置
2.2 控制逻辑
设备上电后,需要自动找到绝对零点位置,记录零点位置L0,并且停在零点位置。接收PC控制指令,控制电机向零点位置的左侧或右侧移动Ld距离,移动至目标位置后,读取光栅尺反馈的实时位置数据,计算出移动误差Le,当Le值小于设置的最大容错差值时[9,11],此次移动控制结束,否则继续向目标位置移动,重复上述过程直到误差达到系统容差[10],详细软件流程如图13所示。

图13 软件控制流程图
3 上位机软件设计
本系统通过QT设计上位机控制软件,实现USB转CAN对闭环系统进行指令控制,主要实现光栅尺归零、光栅尺细调和光栅尺粗调3个功能,如图14所示。

图14 上位机软件光栅控制界面
4 测试验证与结果分析
为验证本系统的运动位移控制精确度,使用激光干涉仪检测系统闭环运动下误差范围,实验测试结果如表1所示。本文中位移重复定位精度是光栅尺归零位后,每一项位移控制重复测试20次得到的平均定位误差。
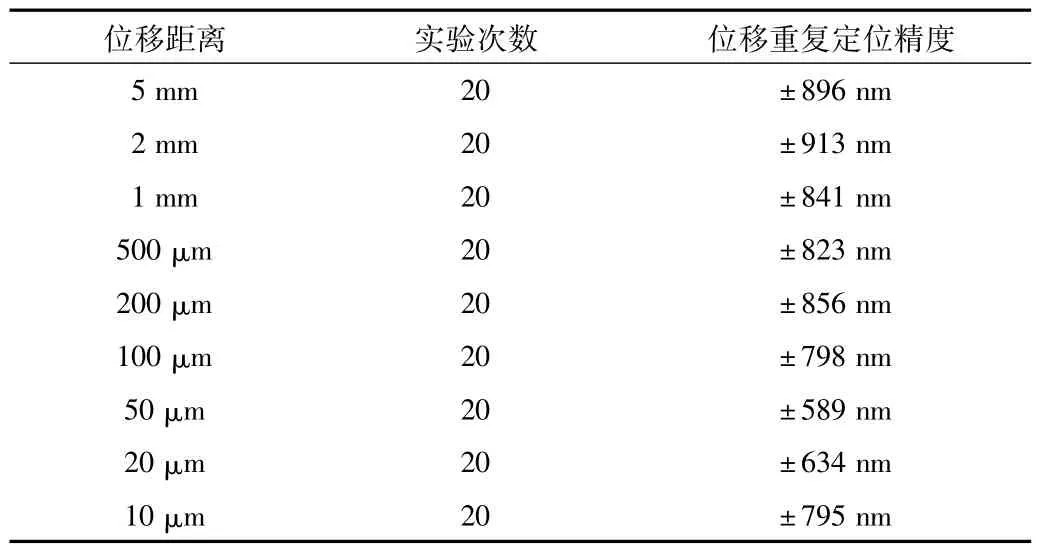
表1 系统闭环控制实验结果
实验结果表明,本文所设计的直线运动系统闭环控制平均误差在±1μm以内,优于其他方案设计误差的±5μm[9,11-12]。
5 结束语
本文针对传统的显微镜操手动操作精确差,无法满足显微镜自动成像以及自动化测量的要求,设计了基于步进电机103H5205-5210、步进电机驱动器TMC5130、光栅尺MercuryⅡTM6510和处理器STM32F407等,实现了4通道直线运动的高精度闭环控制系统。由PC上位机发送控制指令,处理器根据光栅反馈位移信息控制步进电机进行闭环控制。本系统中,步进电机控制和光栅尺AB相解码均由TMC5130实现,处理器STM32F407主要通过SPI获取光栅尺反馈信息,再通过SPI控制步进电机进行位移补偿,整个方案设计简单,工作稳定。实验结果表明,该系统具有明显的高精度定位功能,位移重复定位精度在±1μm以内,具有一定的实用参考价值。
