基于ADAMS的平面四连杆机构运动学仿真分析*
2023-02-24郭大江林顺洪杨远芳戴元梦李宜蔓
傅 欣,郭大江,林顺洪,张 华,余 衡,陈 华,杨远芳,戴元梦,李宜蔓
(1.重庆机电职业技术大学电气与电子工程学院,重庆 402760;2.重庆科技学院机械与动力工程学院,重庆 401331)
0 引言
平面四连杆机构是一种常见的重要机构之一,常用于机械领域中的各重要组成部分,如:应用于机床、工业机器人、多足机器人、汽车设计、液压支护装置、缝纫机、雨刮器等[1-4]。四连杆机构在添加驱动后一般均能按照自定的运动规律运动,能得到其运动规律的曲线图,有利于后期优化轨迹。常用平面四连杆机构通常包括4个位置的角度,分别为极位夹角、摆角、压力角、传动角。通过使用ADAMS多体动力学仿真软件分析四连杆机构的运动特性,能够根据角度值、位移、速度、加速度以及作用点上的力与力矩,对其运动特性的分析更加直观、准确与高效率。可为后期的成套机械装备的设计与开发提供有力的条件[5]。
ADAMS运动学仿真分析,主要由虚拟样机技术发展而来。20世纪80年代开始,虚拟样机技术得到快速发展,计算机技术被赋予了新的概念。于是,国内外学者集中于虚拟样机技术(Virtual Prototyping,VP)的研究。虚拟样机技术主要是将先进的建模/仿真技术、现代信息技术、先进设计制造技术和现代管理技术进行融合,并在复杂产品的生命周期上进行体现和涉及,从而达到优化和综合管理产品的目的[6]。
ADAMS运动学仿真技术作为虚拟样机技术的一种,因其综合性强,能实现建模、求解、可视化技术一体化而被广泛应用。该仿真软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,运用拉格朗日方程方法进行参数求解,通过建立系统动力学方程,对产品机械系统机械动力学分析,并输出相应的运动特性曲线,根据相应的特性曲线就可以对产品的运行特性进行相应的分析和优化[7]。该软件的运用范围广,可对产品进行多方面的分析,如:对机械系统性能的预测、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。该仿真软件可以直接建模后仿真;也可通过常用的三维软件(如:UG、Pro/E、Inventor、SolidWorks等)建立三维模型,然后再导入ADAMS软件中添加约束和驱动等,即可完成仿真分析[8-9]。
林国进等[10]基于ADAMS运动学仿真软件,探索了计算机仿真实验与实验室实验的差别,得出仿真分析的准确性较高。物理实验可以在一定程度上锻炼学生的动手能力,但实验误差大,过程复杂,对实验设备要求高,而利用仿真分析,则可以在很大程度上弥补其弊端。任晓路[11]在探索ADAMS运动学仿真过程中,也表明该分析软件在辅助教学过程中,具有较好的应用价值。两者结论具有一致性。邱海飞[12]在探究四连杆打纬机构中,利用ADAMS运动学仿真,实现了对整个设计系统的柔性化设计,并提出了改进该机构动态特性的方法。王兴东等[13]在分析柔性构件及铰接间隙对整个机构的影响中,采用ADAMS运动学仿真分析,验证了其仿真结果的准确性,同时也确当了连杆与机构之间的关联性。任泽凯[14]基于MATLAB和ADAMS两种软件对四连杆进行仿真分析,结果表明:ADAMS仿真可靠性和准确性高。
综上分析可知,ADAMS仿真应用广泛,其仿真结果可靠性和准确性较高,对于机械结构的设计和优化具有重要作用。而大部分学者对于ADAMS仿真的应用主要根据设计者需要进行相应仿真,而对于四连杆各个角度、位移、速度方面的力与力矩的分析相对薄弱,因此,本文基于ADAMS仿真软件,开展四连杆机构的运动学仿真分析,探究其仿真结果与实验结果异同,进而得出ADAMS仿真对机械结构设计的影响。
1 平面四连杆机构仿真实例与理论计算
1.1 平面四连杆仿真实例
在机械原理课程中,平面四连杆机构的设计尤为重要。能够熟练的分析常用连杆机构的运动特性即各重要角度、位移,速度、作用力、力矩特性曲线等,可为机械创新设计类课程打下良好的基础,更有利于机械类课程的学习与提升[15-16]。
在机械原理课程实验中,涉及到平面四连杆的运动学仿真分析实验。要求学生通过ADAMS软件完成自主建模、添加约束、添加驱动、仿真、优化设计参数等一系列操作完成四连杆机构的运动学仿真分析,分析得出四连杆机构的极位夹角、传动角、摆角,速度、加速度等运动特性曲线。在机械创新实验室中通常采用半圆仪或量角器完成各个角度的测量,其测量过程繁琐。
其次,也可通过理论的方法推导计算各角度值。实验中各杆长尺寸如下:A B杆100 mm、BC杆240 mm、C D杆300 mm、D A杆330 mm,如图1所示。其中极位夹角θ即为原动件AB杆与连架杆BC杆两次共线时所形成的夹角之差;摆角φ即为AB杆与BC杆两次共线时C D杆所在位置的夹角;压力角α是指不计算摩擦力的情况下,受力方向和运动方向所夹的锐角;传动角(γ)是指压力角的余角,通常用来描述机械机构的传动性能,取值范围一般在0°~90°,如图2所示。
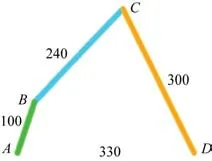
图1 四连杆机构示意图
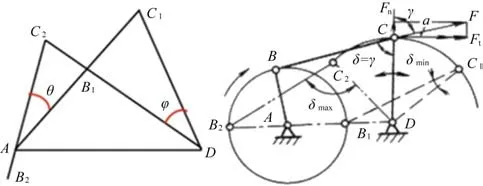
图2 四连杆机构4个角度示意图
1.2 平面四连杆理论计算
平面四连杆杆长定律为最长杆与最短杆之和小于等于其余两杆之和,即为:最长杆长度+最短杆长度≤其余两杆长度之和。即:AD+AB=430≤B C+C D=540;因此该四连杆满足四连杆杆长定律。
极位夹角θ与摆杆CD摆角结合三角形勾股定理得出计算公式:
得:θmin(C1A D)=53.174 8°;
即极位夹角:
得:φmax(C2D A)=65.120 76°;
即摆杆C D摆角:
通过以上推导计算得极位夹角的理论计算值为θ=12.200 9°,摆杆CD摆角的理论计算值为φ=40.018 9°。
2 平面四连杆机构运动学仿真
2.1 ADAMS运动学仿真分析
根据四连杆机构的平面图,在ADAMS软件中建立三维模型。
第一步:设置工作环境。将setting中x和y的间距调为10 mm的工作网格。该操作有利于后期建模时准确的捕捉定位。
第二步:建立几何模型。在主工具栏Bodies下选择Link单元,分别建立四连杆机构AB=100 mm,B C=240 mm,CD=300 mm,D A=330 mm,四连杆机构建立好后点击wireframe,使线框图显示为实体模型。如图3所示。
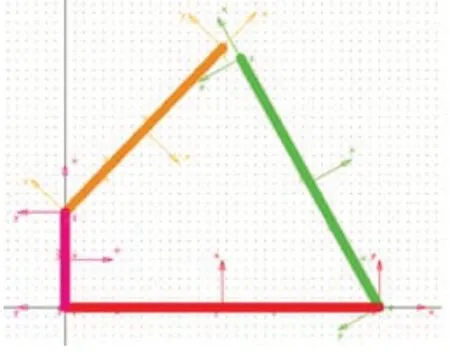
图3 ADAMS四连杆模型建立
第三步:添加运动副约束。该平面四连杆机构,各连接均为低副连接,且均为转动副连接。在主工具栏commector下选择create a Revolute joint,及分别为AB、BC、CD、DA相互连接处创建旋转副,其中BC与CD转动副连接处选择两个体两个点,其余转动副连接选择两个体一个点,且将D A杆定义为机架与大地创建固定连接约束。如图4所示。
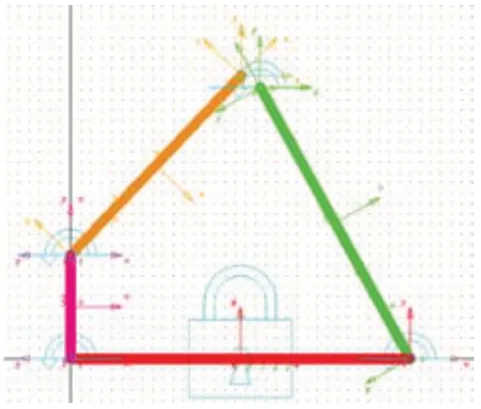
图4 ADAMS四连杆模型添加运动副
第四步:添加驱动。在四连杆机构,曲柄AB为主动件,通过匀速转动提供动力;从动件为摇杆CD,进行变速往返摆动;连杆B C在平面中作复合运动。即该四连杆机构原动件为AB杆,只有在A B杆上添加旋转驱动时,整个四连杆机构才能运动。在主工具栏Motions下选择Rotational joint Motion为AB杆与DA杆连接处添加旋转驱动,并在joint Motion中设置Function(time)为1d*time,然后保存模型。如图5所示。
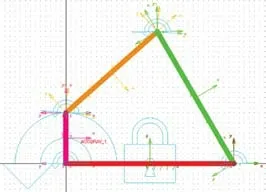
图5 ADAMS四连杆模型添加驱动
第五步:机构运动学仿真分析。在主工具栏中选择Simulation下的Run an interactive,并设置结束时间为360 s,步长为360步,点击运行,仿真中可以通过改变时间与步长来改变四连杆机构的转动速度。
第六步:后处理。在ADAMS后处理模块Postproces⁃sor中可进行数据的显示与分析,其得到的数据表格与数据曲线图有利于分析机构设计的合理性。在主工具栏中选择Results下的Postprocessor进入ADAMS后处理界面如图6所示。
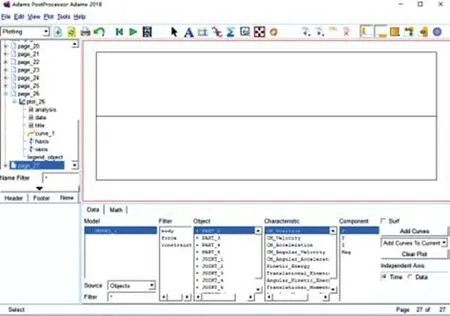
图6 ADAMS后处理模块
2.2 仿真数据与理论计算结果对比分析
ADAMS后处理有足够强大的测量功能。通过AD⁃AMS后处理可以测量位移、速度、角速度、角加速度、各点作用力与力矩变化特性曲线等。如图7~11所示。通过运动特性曲线图可以清晰地看出各运动学参数的变化趋势与变化范围,有利于判断机构设计的合理性。

图7 原动件AB杆在X、Y坐标的位移、速度、加速度特性曲线
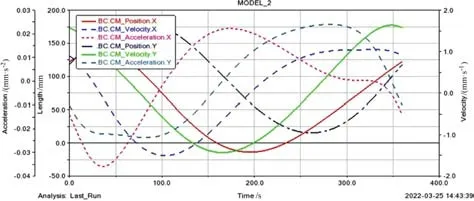
图8 连杆BC在X、Y坐标的位移、速度、加速度特性曲线
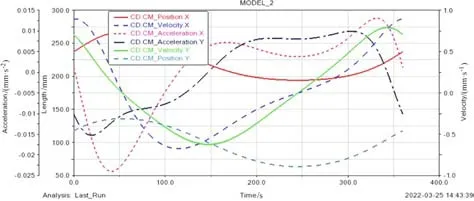
图9 摇杆CD杆在X、Y坐标的位移、速度、加速度特性曲线

图10 杆AB、BC、CD角速度特性曲线
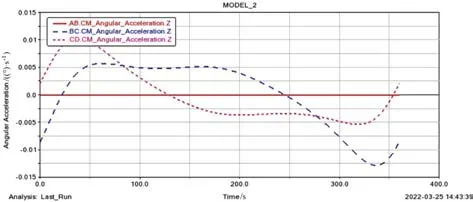
图11 杆A B、B C、C D角加速度特性曲线
AB杆与BC杆两次共线时形成的夹角,通过仿真得到,AB杆与B C杆呈180°和360°时,通过查找ADAMS后处理Postprocessor模块中图12所示的∠A BC、∠BAD、∠ADC角度的变化特性曲线对应的table数据表可得,当∠AB C1=179.7523°时∠C1A D=53°、∠A D C1=65.1206°,当∠B A D=359.709°时∠C2AD=245°、∠AD C2=25.102°,即极位夹角θ与摆角φ分别如下:
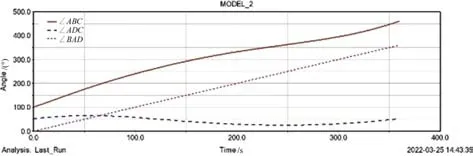
图12 ∠AB C、∠BA D、∠ADC角度变化特性曲线
其理论计算值与仿真值对比如表1所示。通过表中所示的极位夹角与摆角仿真值与理论计算值对比,可以发现其误差值非常小。其极位夹角与摆角的误差主要是由于在ADAMS软件中仿真时设定的步数所决定,若取值步数越多,则产生的误差越小。因此ADAMS多体运动学仿真软件,应用到机构运动学分析,其仿真精度较高,能够较真实地反映机构的运动特性。
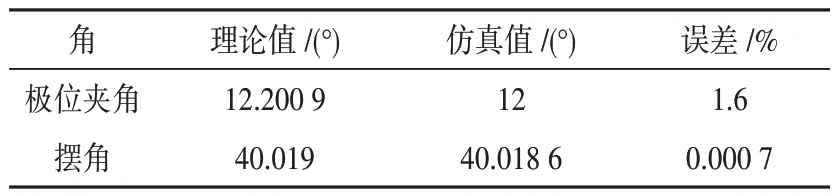
表1 极位夹角与摆角仿真值与理论计算值对比
3 结束语
通过运用ADAMS运动学仿真软件,对平面四连杆机构位移、速度、角速度、角加速度、各点作用力与力矩变化的运动特性进行分析,发现其仿真分析结果与理论计算值相比其误差较小,通过仿真分析能够真实地反映其运动学的关键参数,有利于机构设计合理性的验证,并通过仿真运动学可以更直观地观察其运动过程,使整个连杆机构设计中更加动态化、直观化、方便化和精准化,提高了机构设计的准确度与设计效率。ADAMS运动学仿真软件引用到工程上有利于缩短产品研发周期,为产品的设计与制造提供了一个可视化仿真环境,降低开发成本与时间,提高了产品的质量。将ADAMS多体动力学仿真软件引用到辅助教学上,有利于学生对机构运动原理的掌握,其对常用连杆机构运动学的分析教学起到了重要的作用。
