矿井无轨胶轮车智能化管理系统研究
2023-02-21杨坤
杨坤
(1.煤炭科学技术研究院有限公司,北京 100013;2.煤矿应急避险技术装备工程研究中心,北京 100013;3.北京市煤矿安全工程技术研究中心,北京 100013)
0 引言
矿井辅助运输系统主要包括无轨胶轮车运输系统与有轨电机车运输系统。《智能化煤矿验收管理办法(试行版)》对矿井辅助运输系统中的车辆位置信息采集、车辆工况信息采集、车辆路径智能规划、辅助运输管理系统等方面提出了具体要求。王国法等[1]提出了煤矿智能化建设应加快开发适用于不同运输场景的智能辅助运输系统,实现主辅运输系统的智能化。矿井无轨胶轮车智能化管理系统是煤矿智能化建设的重要组成部分[2-4]。
近年来,众多学者对矿井无轨胶轮车管理系统进行了大量研究。文献[5]基于射频识别技术、电子显示牌、信号牌、有线网络等设备与技术,实现了车辆位置管理、车辆信息采集与行车管理功能。文献[6]基于读卡器、信号灯及车载标志卡实现了车辆位置管理与单车通行巷调度管理功能。文献[7]基于超宽带(Ultra Wide Band,UWB)定位技术与地理信息系统(Geographic Information System,GIS)技术实现了车辆地理信息展示功能。文献[8-9]结合车辆位置数据与红绿灯控制技术,实现了矿井车辆的信息化管理。虽然矿井无轨胶轮车辆管理系统的研究取得了众多成果,但距离《智能化煤矿验收管理办法(试行版)》中要求的车辆精准定位、无线移动通信、路径规划与车辆运行状态智能检测、重要运输交叉口运行管理等智能化管理功能还有一定差距。
本文通过对矿井无轨胶轮车智能化管理系统进行需求分析,提出了系统架构,研究了车辆定位技术、车辆通信技术、车辆导航与轨迹回放技术、红绿灯控制技术与防碰撞预警技术等关键技术,并进行了实验验证。
1 系统需求分析
考虑到煤矿井下辅助运输路线分散、巷道狭窄的特点,结合《智能化煤矿验收管理办法(试行版)》对辅助运输管理系统的要求,矿井无轨胶轮车智能化管理系统应具有以下功能。
(1)矿井车辆精准定位。矿井车辆位置是实现车辆路径规划、智能调度与超速预警功能的重要数据来源,因此,实现矿井无轨胶轮车智能化管理的首要前提是对矿井车辆进行精准定位。
(2)矿井车辆工况信息实时采集。为实现矿井车辆检验、维修与备品备件的智能化管理,需实时采集矿井车辆转速、里程、水温、表面温度、排气温度等工况信息。
(3)矿井车辆移动通信。为满足矿井车辆之间和矿井车辆与调度员之间的实时通信,矿井车辆需具备车载视频与语音通信等功能,考虑到智能化管理系统的经济性,矿井车辆需配备满足4G/5G 与WiFi 通信功能的终端。
(4)矿井车辆智能导航。煤矿井下工作地点分散,运输路线复杂,巷道内弯道和交叉路口较多,易造成行驶路线偏离,需根据车辆当前位置实时智能规划车辆行驶路径。
(5)矿井交通状态实时监测与控制。煤矿井下弯道、交叉口、单车通行巷等复杂行驶场景较多,需要通过红绿灯引导技术辅助驾驶员正常行驶。
(6)矿井车辆防碰撞预警。煤矿井下存在光照条件差、噪声大、视野盲区多等特点,为预防车辆与车辆、车辆与行人发生碰撞,需具备矿井车辆防碰撞预警功能。
2 系统架构
矿井无轨胶轮车智能化管理系统由车载终端、通信网络、定位系统、车辆管理系统等组成,如图1所示。
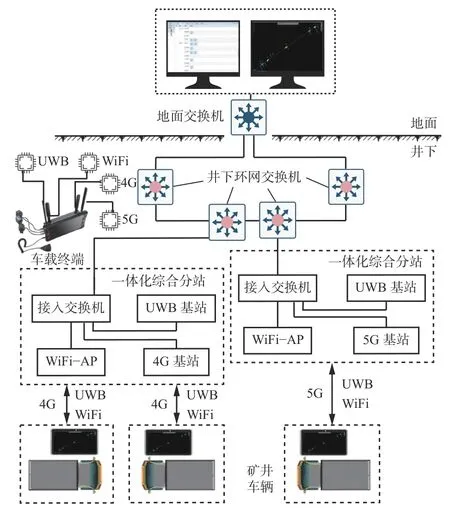
图1 矿井无轨胶轮车智能化管理系统架构Fig.1 Architecture of intelligent management system of mine trackless rubber-tyred vehicle
(1)车载终端主要由UWB 定位模块、WiFi 模块、4G/5G 模块、处理模块、车况信息采集模块等组成,安装在车辆驾驶位置,可实现车况信息与位置信息的实时采集及矿井巷道、车辆、行人、红绿灯状态等信息的实时展示。UWB 定位模块与一体化综合分站内部的UWB 基站配合实现车辆精准定位。WiFi 模块与一体化综合分站内部的WiFi-AP 或4G/5G 基站配合实现车载终端与车辆管理系统的数据交换。4G/5G 模块与一体化综合分站内部的4G/5G 基站配合实现车辆之间、车辆与井上人员之间的实时通信。车况信息采集模块通过CAN 总线接口实现转速、油温、行驶里程等车况信息的实时采集。处理模块通过搭载的Android 系统实现车辆定位调度信息软件、车辆采集信息软件等的运行。
(2)通信网络主要由WiFi-AP、WiFi-AC、4G/5G基站、接入交换机、井下环网交换机、地面交换机等设备组成,实现车辆管理系统、车载终端、4G/5G 终端与WiFi 终端之间的互联互通。
(3)定位系统主要由UWB 模块、UWB 基站、数据解析程序、数据库、Web 系统组成。通过UWB 模块与UWB 基站之间的通信实现车辆、人员位置信息的计算,并通过数据解析程序、数据库等实现车辆、人员位置信息的解析与存储。通过对车辆与车辆、车辆与行人、UWB 基站与红绿灯位置状态的分析,实现基于车辆位置的红绿灯控制与矿井车辆防碰撞预警。通过对车辆和行人位置、红绿灯状态信息的解析,结合GIS 技术,实现车辆导航、轨迹回放、红绿灯状态实时展现等功能。
(4)车辆管理系统包括车辆信息管理模块、车辆大屏及车辆实时位置、GIS、出入井记录、报警等信息查询模块。车辆信息管理模块主要实现车辆信息的录入、修改、删除与查询。车辆大屏用于车辆实时位置分类统计和展示,车辆实时位置主要包括区域信息、分站信息、距离信息、车辆工况信息等。
3 关键技术
3.1 车辆定位技术
基于UWB 的矿井车辆定位技术是通过测量电磁信号在车载识别卡与UWB 基站之间的传输时间、角度、信号强度等实现定位,虽然其定位精度可达分米级甚至厘米级,但仍存在系统误差、多径效应、非视距等干扰。因此,在得到初始车辆定位信息后,需要引入Kalman 等滤波算法进一步优化[10]。
本文采用基于双向飞行时间(Two Way-Time of Flight,TW-TOF)的方式进行车辆定位[11],如图2 所示。其中,TSP为车载识别卡发送测距请求帧的时间戳,TRP为UWB 基站接收测距请求帧的时间戳,TSR为UWB 基站发送测距响应帧的时间戳,TRR为车载识别卡接收测距响应帧的时间戳,TSF为车载识别卡发送测距数据帧(TSP,TRP,TSF)的时间戳,TRF为基站接收测距数据帧(TSP,TRP,TSF)的时间戳;分别为TSR与TRP、TSF与TRR的时间差。

图2 基于TW-TOF 的测距原理Fig.2 Distance measuring principle based on two way-time of flight
UWB 基站接收到车载识别卡发送的测距数据帧后,根据接收到的数据,按照如下流程计算车载识别卡与UWB 基站的距离[12]。
(1)计算车载识别卡发送与接收测距帧的时间差:

(2)计算UWB 基站接收与发送测距帧的时间差:

(3)计算UWB 基站发送测距帧与接收数据帧的时间差:

(4)计算车载识别卡发送数据帧与接收测距帧的时间差:

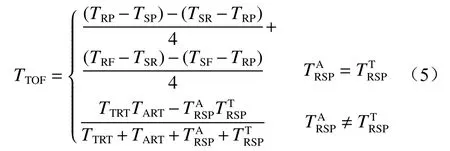
(6)计算车载识别卡与UWB 基站之间的距离:

式中c为光速。
3.2 车辆通信技术
3.2.1 WiFi
WiFi 通信技术是矿井无线通信技术的主流技术之一,具有可移动性、组网简单、与以太网兼容、覆盖范围广、通信质量好、传输速度快、可靠性高等特点。矿用WiFi 通信技术在矿井无轨胶轮车智能化管理系统中主要与4G/5G 通信业务互相补充,满足车载终端中业务数据的正常交换需求。
3.2.2 4G/5G 通信
矿用4G 无线通信主要由核心网、井下环网和4G 通信基站组成,具有通信方式灵活、智能性好、通信质量高等特点[13]。矿用5G 是4G 的升级和延伸,具有高速率、高带宽、低功耗和低时延的优势。通过4G 核心网与5G 核心网实现4G 与5G 网络之间的互操作,从而保证矿井移动通信服务的兼容性与延续性。
3.3 车辆导航与轨迹回放技术
3.3.1 GIS 技术
GIS 是对矿井有关地理位置相关的元素进行采集、分析与处理的空间信息系统[14-15]。本文设计的GIS 架构包含数据管理层、服务层、应用层,如图3所示。数据管理层为GIS 服务与业务服务提供数据来源,主要包含地图文件(Shape file)和PostgreSQL,PostgreSQL 主要用于数据存储与管理。服务层主要包含GIS 服务器与业务服务器:GIS 服务器基于GeoServer 实现,提供地图的创建、修改与删除功能;业务服务器基于Tornado 与Python 语言实现,提供车辆位置、车辆工况信息、车辆历史记录、红绿灯状态信息、预警信息等的发布功能。应用层主要基于HTML、CSS、JavaScript 等Web 技术与Openlayers、BootStrap 等组件实现,用于渲染地图文件并显示车辆位置、车辆工况数据、红绿灯状态、预警信息等数据信息。
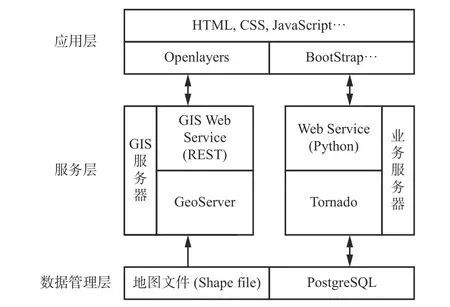
图3 GIS 架构Fig.3 GIS architecture
3.3.2 实时定位技术
矿井车辆实时定位技术主要是基于GIS 技术,将车辆位置信息实时渲染到矿井地图中,其流程如图4 所示。利用应用层的定时查询功能,通过Rest API 接口周期性查询车辆位置信息;服务层接收到查询请求后,解析查询请求参数,并根据查询参数调用查询模块;数据管理层接收到查询模块的调用后,返回查询数据;服务层接收到查询模块的响应数据后,按照json 格式组织数据,并按照Rest API 接口形式返回数据与响应状态;应用层接收到响应数据后,进行车辆位置信息与工况信息的渲染。

图4 实时定位流程Fig.4 Real-time positioning process
3.3.3 导航技术
矿井车辆导航技术主要是基于GIS 技术、车辆位置信息、参考节点信息(UWB 基站信息)规划由当前位置到目标位置(UWB 基站位置)之间的路径。按照是否对全局信息已知,可分为全局路径规划和局部路径规划。考虑到煤矿井下巷道信息与参考节点信息已知,本文主要讨论全局路径规划方法。常用路径规划算法优缺点见表1[16-19]。

表1 常用路径规划算法优缺点Table 1 Advantages and disadvantages of common path planning algorithms
煤矿井下具有巷道交叉口多、工作地点分散、巷道狭窄等特点,且车辆行驶过程存在盲区,因此选用矿井车辆行驶路径规划算法时应考虑实时性与鲁棒性。智能仿生类路径规划算法实时性差,且处理较复杂的优化问题时易出现搜索停滞,因此不满足实时性与鲁棒性要求;基于采样的路径规划算法规划的路径在很大程度上偏离最优路径,不满足鲁棒性要求;基于图搜索的路径规划算法易于实现,性能较好,尤其是使用启发式函数的A*算法,具有实时性好的优点。考虑到路径规划算法的成熟性,本文选用A*算法作为矿井车辆导航技术中的路径规划算法。
矿井车辆导航流程如图5 所示。首先,获取车辆当前位置信息,包括所在UWB 基站信息、方向与距离;其次,确定目标位置信息,即目标UWB 基站信息;然后,根据当前位置的UWB 基站信息、目标UWB 基站信息、矿井巷道信息、参考节点信息,利用A*算法生成最优路径,该路径由UWB 基站坐标信息与中间插值坐标信息(矿井巷道信息)组成;最后,利用GIS 技术渲染最优路径信息,并实时更新车辆位置信息。

图5 矿井车辆导航流程Fig.5 Process of mine vehicle navigation
3.3.4 轨迹回放技术
矿井车辆行驶轨迹回放技术用来检测特定车辆是否按照指定路线行驶,其流程如图6 所示。首先,利用查询输入的开始时间和结束时间生成轨迹列表,轨迹列表主要包括UWB 基站ID、基站安装位置、进入基站时间与离开基站时间;然后,根据轨迹列表信息生成路径信息并渲染,路径信息包含基站坐标信息与参考位置信息;最后,根据路径信息回放车辆行驶轨迹。

图6 轨迹回放流程Fig.6 Process of track playback
3.4 矿井红绿灯控制技术
矿井红绿灯控制技术主要解决井下交叉口、丁字口、单车通行巷等复杂区域的车辆有序通行的难题。考虑到煤矿井下主要包含十字交叉口、丁字路口、单车通行巷等复杂区域,为了对复杂区域的模型进行统一与简化,采用十字交叉口模型对井下交叉口、丁字口等进行分析,采用单车通行巷模型对单行道进行分析。
3.4.1 十字交叉口模型
十字交叉口模型的工作原理如图7 所示,其中,Lj(j∈[A,B,C,D])为红绿灯Hj与UWB 基站j的距离,lj为车辆与UWB 基站j的距离,tj为控制阈值。

图7 十字交叉口模型工作原理Fig.7 Working principle of intersection model
十字交叉口模型的控制原理如下:
(1)假设一辆车由基站A 向右行驶时HA为绿灯,则车辆继续通行。
(2)若满足lA+tA>LA,则 将HA与HB置为绿灯,HC与HD置为红灯,交叉口车辆数加1,在交叉口车辆信息列表中添加车辆信息elem={′id′:′65632′,′station′:′A′},其中,id 为车辆卡号,station 为驶入十字交叉口的基站号;否则继续通行。
(3)当车辆保持直行时,继续通行;当车辆左转时,执行步骤(4);当车辆右转时,执行步骤(5)。
(4)若满足LB-lB>tB,则执行步骤(7),否则继续通行。
(5)若满足LC-lC>tC,则执行步骤(7),否则继续通行。
(6)若满足LD-lD>tD,则执行步骤(7),否则继续通行。
(7)交叉口车辆数减1,从交叉口车辆信息列表中弹出车辆信息。
(8)判断弹出的车辆信息是否驶入基站A,若是则跳转至步骤(9),否则跳出处理流程。
(9)判断车辆数量是否为0,若是则HA、HB、HC与HD都置为绿灯,否则跳出处理流程。
3.4.2 单车通行巷模型
单车通行巷模型的工作原理如图8 所示。

图8 单车通行巷模型工作原理Fig.8 Working principle of single vehicle passing lane
单车通行巷模型的控制原理如下:
(1)假设一辆车由基站A 向右行驶时HA为绿灯,则车辆继续通行。
(2)若满足lA+tA>LA,则将HB置为红灯,单车通行巷内车辆数加1,否则继续通行。
(3)若满足LB-lB>tB,则执行步骤(4),否则继续通行。
(4)单车通行巷内车辆数减1,若车辆数为0,则将HA与HB都置为绿灯,否则跳出处理流程。
3.5 防碰撞预警技术
矿井车辆防碰撞预警技术是基于UWB 基站位置、行人位置与车辆位置的联合分析,通过GIS 技术实现对行人或车辆的防碰撞预警提示。矿井车辆防碰撞预警原理如图9 所示,其中L′为2 个基站的相对距离,fi(i为行人或车辆序号)为行人或车辆i相对于各自基站的距离,di为行人或车辆相对各自基站的方向。
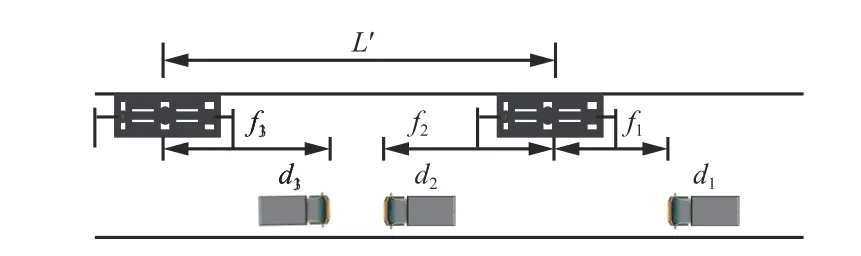
图9 防碰撞预警技术原理Fig.9 Principle of anti-collision early warning technology
当车辆与车辆、车辆与行人属于同一个基站时,防碰撞预警条件为

式中Cm为防碰撞阈值,m为用于区分车辆与车辆、车辆与行人的变量。
当车辆与车辆、车辆与行人属于不同基站时,防碰撞预警条件为

4 实验分析
在某矿进行系统实验,该矿主巷道部署一体化综合分站60 余台,其中10 台内含5G 基站,50 余台内含4G 基站;录入车辆19 辆,其中物料车10 辆,人车8 辆,洒水车1 辆;部署红绿灯4 套,其中在十字路口和单车通行巷各部署2 套。
4.1 矿井车辆定位实验
3 个测试基站部署在3206 运输巷绕道口、3 号永久避难硐室口、3306 回风巷绕道口,3 个基站为连续分布,各自覆盖半径为400 m,测试车辆为物料车,车辆运行速度不小于7 m/s。实验数据见表2,其中实际位置和测量位置用车辆与基站的距离表示。可看出静态误差小于0.3 m,动态误差小于7.3 m,满足应用要求。

表2 矿井车辆定位实验数据Table 2 Experimental data of mine vehicle positioning m
4.2 矿井车辆通信实验
确定测试车辆为人车1 与人车2,人车1 的车载终端呼叫人车2 的车载终端,并完成通话。车载终端如图10 所示。

图10 车载终端Fig.10 Vehicle terminal
4.3 矿井车辆导航实验
确定测试起始位置为清煤斜巷,目标位置为3 号永久避难硐室。本文提出的导航技术规划的路径信息与实际路径信息对比见表3。矿井车辆导航效果如图11 所示。其中,蓝圈标注为目标位置(3 号永久避难硐室),红圈标注为导航车辆的当前位置(清煤斜巷),黄线为导航路径信息的渲染表示。结合表3 与图11 可看出,导航路径信息与实际路径信息相符,说明基于A*算法的矿井车辆路径规划算法满足导航需要。

表3 路径信息对比Table 3 Comparison of path information
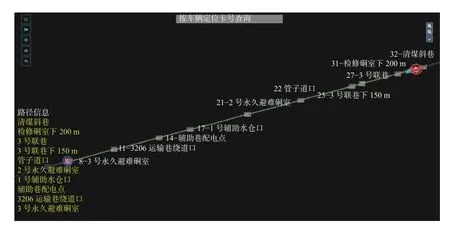
图11 矿井车辆导航效果Fig.11 Effect of mine vehicle navigation
4.4 矿井车辆轨迹回放实验
矿井车辆轨迹回放效果如图12 所示,图12(a)用于选定回放轨迹时间范围;图12(b)显示生成的回放路径;图12(c)显示轨迹回放渲染状态,其中红旗标注点为终点位置,车辆标注位置为回放当前位置,黄线表示车辆的行驶轨迹。可看出通过矿井车辆轨迹回放技术实现了选定时间段内的车辆运行轨迹回放。

图12 矿井车辆轨迹回放效果Fig.12 Effect of mine vehicle track playback
4.5 矿井车辆红绿灯控制实验
确定测试模型为单车通行巷模型,基站A 为3206 运输巷绕道口,基站B 为3 号永久避难硐室口,基站A 与基站B 的左方向为负,LA与LB取值为200 m,tA与tB取值为10 m,车辆与基站A 与基站B 的距离分别为lA与lB。测试数据见表4,可以看出,通过忽略方向的处理,若数据满足lA+tA>LA或LB-lB>tB,红绿灯HA与HB的状态发生了预定变化。例如,车辆由基站A→基站B 行驶过程中,当车辆距离基站A 195 m 时,195+10>200,数据满足lA+tA>LA的条件,HB状态发生了变化。由此可见,矿井单车通行巷的红绿灯控制技术满足应用要求。

表4 单车通行巷实验数据Table 4 Experimental data of single vehicle passing lane
4.6 矿井车辆防碰撞预警实验
确定同基站模型测试地点为3 号联巷,跨基站模型测试地点为检修硐室下200 m 与3 号联巷,基站之间距离为800 m,车辆之间预警阈值为50 m,人与车之间预警阈值为30 m。实验数据见表5,可看出,当车辆与车辆或车辆与行人处于同基站时,若相对距离满足式(7)的判断条件,则车辆发出预警信号;当车辆与车辆或车辆与行人处于不同基站时,若相对距离满足式(8)的判断条件,则车辆发出预警信号。例如,2 辆车处于同基站时,若某辆车距离基站+180 m,另外一辆车距离基站+135 m,则数据满足|f1-f2| 表5 防碰撞预警实验数据Table 5 Data sheet of anti-collision early warning experiment (1)通过需求分析,得出矿井无轨胶轮车智能化管理系统宜具有车辆通信、车辆定位、车辆导航、车辆轨迹回放、车辆车况信息管理、红绿灯控制、防碰撞预警等功能。 (2)矿井无轨胶轮车导航技术宜采用成熟度较高的基于图搜索的路径规划算法,矿井无轨胶轮车导航和轨迹回放技术应与GIS 技术相结合。 (3)基于UWB 的矿井车辆定位技术静态误差小于0.3 m,动态误差小于7.3 m,满足无轨胶轮车定位要求;WiFi 与4G/5G 通信、基于A*算法的矿井车辆路径规划及车辆轨迹回放、红绿灯控制、防碰撞预警等功能均能满足应用需求。 (4)矿井红绿灯控制技术中,车辆违规驶入单车通行巷时,需要考虑车辆恢复通行后红绿灯状态的控制技术,下一步将对该技术进行深入研究。
5 结论