利用TRIZ创新方法提高轨道巡检机器人矿山应用的适应性
2023-02-19张伟徐锋刘永睿于福龙
张伟,徐锋,刘永睿,于福龙
(1.丹东东方测控技术股份有限公司,辽宁丹东 118000;2.辽宁省科学技术馆,辽宁沈阳 110167)
1 应用场景及研发背景
轨道式智能巡检机器人可替代人工,实现远程例行巡查,在事故和特殊情况下可实现特殊巡检和定制性巡检任务,实现远程在线监测,在减少人工的同时,大大提升运维的范围和频率,改变传统巡检方式,实现巡检智能化。智能巡检机器人定制化携带摄像头,定制化多种检测传感器,通过测温热成像仪,采用视觉识别技术,可自主完成智能巡检及分析。目前矿山运输中普遍存在皮带生产线较多、距离特别长、传统人工巡检工作风险性高且精度不足等问题。安装红外摄像头、热成像仪、光学摄像机、拾音传感器、烟雾报警器、危险气体探测器的智能巡检机器人可有效采集生产场地周围的图像、声频、温度环境、烟雾、不明气体等信息,并将信息及时反馈给指挥调度中心,提升事故隐患的预警和检测效率,同时完成了巡检工作的“去人工化”,减少了该项工作的人工成本投入,提高了矿山运输安全与生产安全[1,2]。
2 项目问题及分析
2.1 当前系统功能及组成
功能:轮系驱动机器人在轨道行走。组成:主动轮、从动轮、承重轮、导向轮、顶轮、支撑框架。
2.2 当前系统工作原理
主动轮提供驱动力,从动轮提供压紧力,承重轮承载巡检机器人重量,导向轮为机器人作方向导引,顶轮减少机器人行走过程中的上下振动,支撑框架用于整套轮系连接。
2.3 当前系统的主要问题
机器人越障性差,在高粉尘环境中运行效果差。
3 使用TRIZ工具分析
3.1 功能分析
通过功能分析,明确功能对象,掌握组成部分的各种功能,明确各项功能之间的相互作用关系[3,4]。
a)功能分析——组件分析。技术系统:主动轮、从动轮、承重轮、导向轮、顶轮、支撑框架,超系统:粉尘、温度、湿度、厂房,作用对象:轨道。图1 所示为功能模型分析图。

图1 功能模型分析图
b)功能分析——相互作用分析表,见表1。通过相互作用分析表掌握各组件之间的相互作用关系。
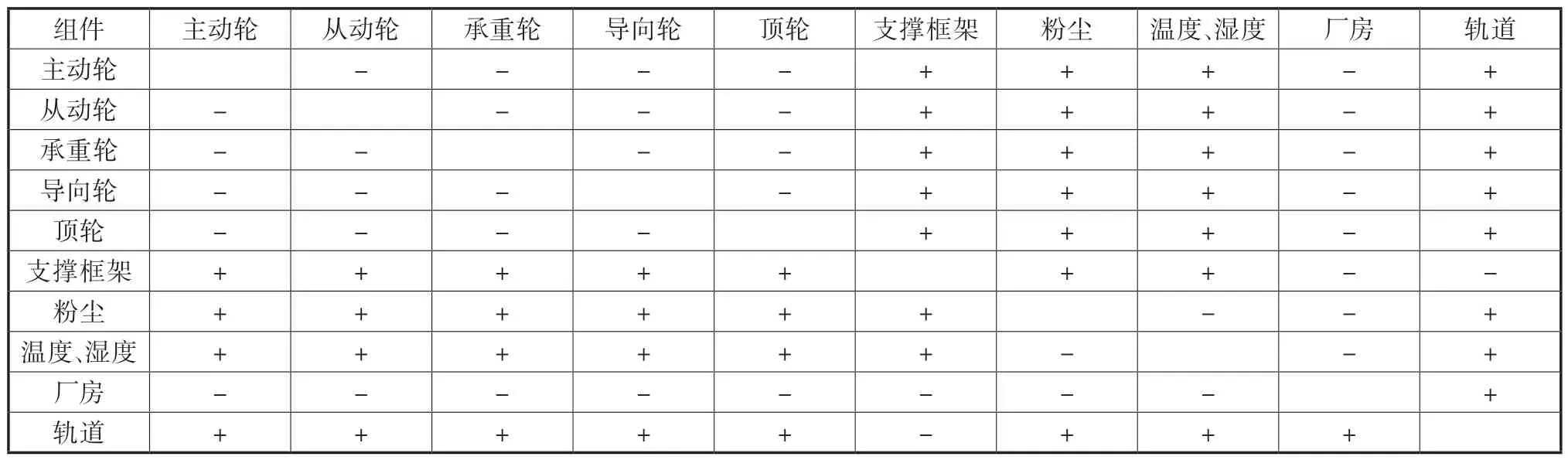
表1 相互作用分析表
c)功能分析——功能模型表,见表2。通过功能模型表,对各组件的功能进行分析,并划分等级,予以评分。

表2 功能模型表
d) 功能分析——功能模型分析。对巡检系统进行分析,建立行走机构模型,定义组件和超系统组件,在轮系行走时顶轮会有与运动方向相反的摩擦力。
通过裁剪法,得到方案(1):去除顶轮,依靠导向轮提供压紧力,减小摩擦力,提升轮系越障性[5,6]。
3.2 最终理想解
见表3 最终理想解分析表,通过最终理想解,得到方案如下:
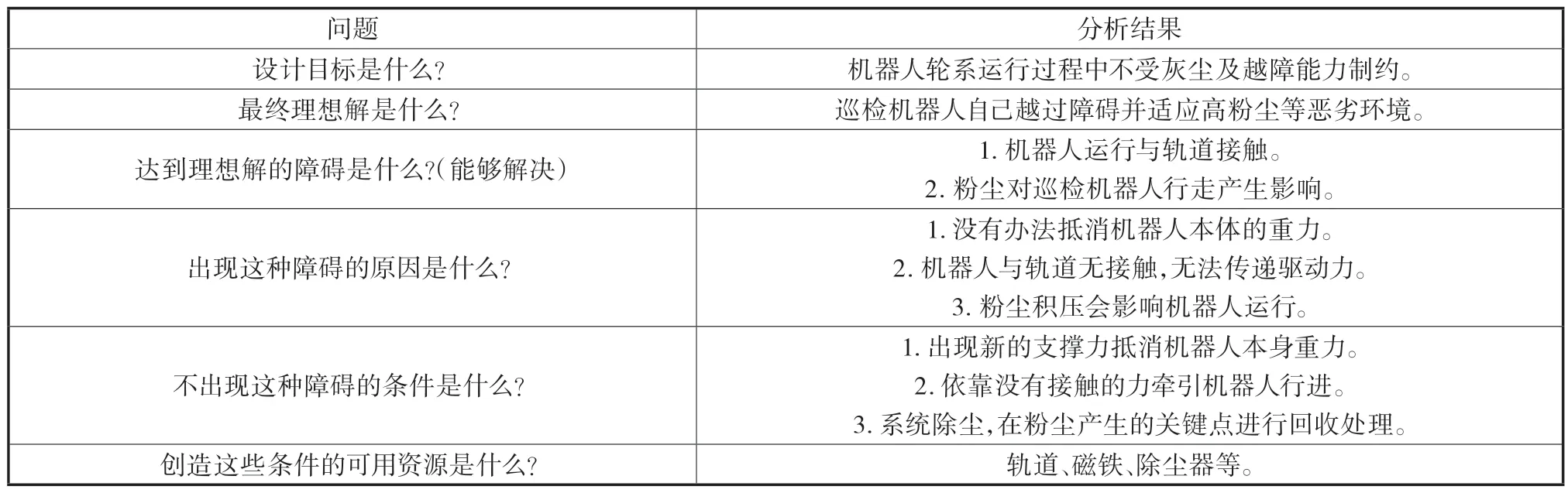
表3 最终理想解分析表
方案(2)设计快捷调整夹块,适应温差变化大等特殊情况。
方案(3)采用磁悬浮技术,实现机器人智能巡检。
方案(4)在落料口安装除尘器,对粉尘进行收集、处理[7]。
3.3 九屏幕法[8,9]
通过系统过去、现在、未来利用九屏幕法分析系统,如图2 所示。通过对系统资源进行查找,得到如下解决方案。
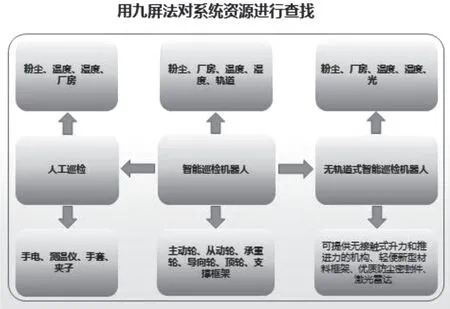
图2 九屏分析图
方案(5):增加机械密封、迷宫密封等防灰效果好的防灰措施。
方案(6):选用先进、轻便、加工性好的碳纤维材料,降低轮系重量。
方案(7):应用无人机进行特定环境巡检。
3.4 因果分析[10]
因果分析是TRIZ 方法中寻找工程问题根本原因的主要工具。通过深入工程问题,层层分析,最终找到关键原因。从组件功能模型分析建立因果链,造成煤矸的主要原因如图3 因果链分析图所示。

图3 因果链分析图
4 运用TRIZ工具解决
4.1 矛盾分析[11,12]
a) 技术矛盾一,根据因果链分析中的2.3.1,解决顶轮夹紧力不足问题,如果要提升顶轮夹紧力,就要增加顶轮的预紧压力,但轮系整体能耗增加。将问题模型标准化为对应的39 个通用工程参数: 改善的是NO.11 压力,恶化的参数NO.19 动物能耗。通过查矛盾矩阵表得出可使用的发明原理有:NO.14 曲面化原理、NO.24 中介物原理、NO.10 预操作原理、NO.37 热膨胀原理。根据矛盾分析,可使用NO.14 曲面化原理,将物体的直线部分用曲线或球面代替。
方案(8):将圆柱形顶轮更改为曲面顶轮,降低轮系整体阻力及能耗,同时解决机器人行驶晃动问题。
b) 运用物理矛盾一,顶轮夹紧力既要小又要大。顶轮夹紧力不足,会出现机器人在运行过程中打滑、晃动,夹紧力特别大会出现摩擦增大、电机负载、能耗增加问题。采用条件分离得到如下方案。
方案(9):在顶轮安装拉力传感器,保证夹紧力稳定、可靠。
c) 技术矛盾二,根据因果链分析中的2.2.3,解决机器人转向时承重轮摩擦阻力大的问题,可以增加回转机构,降低轮系阻力,但装置复杂性增加。将问题模型标准化为对应的39 个通用工程参数:
改善的是NO.10 力,恶化的参数为NO.36 装置复杂性,通过查矛盾矩阵表得出可使用的发明原理有:NO.26 复制、NO.35 参数变化、NO.10 预操作、NO.18 振动 ,根据矛盾分析,可使用NO.10 预先作用,预置必要的动作、机能,得到如下方案。
方案(10)将导向轮组件增加回转机构,当轮系沿轨道转向时,可预先转动,降低轮系阻力。
d) 运用物理矛盾二,回转机构内的导向轮距离轨道既要近又要远。由于增加回转机构,机器人在转弯行驶时,导向轮要根据转弯半径的不同,提供不同的压紧力 ,弹簧钢材质可根据轨道形状自适应压紧轨道。采用条件分离原理,得到如下方案。
方案(11)选择板簧作为导向轮支撑件,可以使导向轮在转弯时以合适的压紧力与轨道接触,既不增加额外的摩擦力,节约能耗,又保证轮系行驶状态平稳。
4.2 物-场分析[13,14]
用物-场分析法对当前系统进行分析,并改进当前技术系统的功能。
当前系统物-场模型的技术系统是,机器人在行驶过程中,主动轮提供驱动力,使轮系沿轨道前进,但皮带廊内粉尘严重,导致主动轮打滑,越障性变差,当前的物S1 是轨道,物S2 是轮系,场F 是机械场。轮系S2 利用机械场F 作用于轨道S1。因为轮系S2 无法利用机械场F 在轨道S1 顺畅行驶,所以轮系S2 作用于轨道S1 是一个效应不足的完整模型。
利用76 个标准解引入场S2.1 向符合物场模型进化中的S2.1.1 引入物质,向串联式物场模型进化。增加新的动力场F2 和新物质水S3,利用水清除粉尘,减少行驶阻力,得到如下方案。
方案(12)增加新物质,高压水清除轨道粉尘。
方案(13)使用风机,大风量气体清除轨道粉尘。
方案(14)使用高压空气炮清除轨道粉尘。
5 方案评估
综合节约成本、适应性、可维护性、易加工性、创新性等因素,上述技术方案中最优方案为8、9、10、14,较优方案为2、5、11,方案较差的是1、3、4、6、7、12、13,因此本创新创意最终方案确定为方案2、5、8、9、10、11、14 相结合的方式。
6 解决方案实施情况
(1)实现智慧工厂,提升整体管理水平。
(2)规范设备操作流程,加强安全管理。
(3)打造行业标杆,提升企业社会形象。
(4)解决巡检人员在高原、高空、高危、高尘等恶劣环境下作业难的问题。
轨道巡检系统已远销俄罗斯、巴西等地,在我国西藏、新疆、内蒙古等10 余个省(自治区),已成功运行。
年产50 余套,每套系统平均200 万(含软件、轨道铺设)。
7 结语
本文应用TRIZ 方法对智能巡检机器人进行改进升级,能够使机器人更好地适应矿山皮带廊等恶劣环境。满足现场的巡检要求,优化巡检质量,提升选厂智能化水平、提高经济效益。
