基于全空域跟踪的椭球型天线桁架设计及标校方法
2023-02-18刘健泉周书中吴海洲赵晓阳郭向峰
刘健泉,周书中,吴海洲,赵晓阳,李 扬,郭向峰
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
随着商民用航天的高速发展,卫星数量井喷式增长,为满足未来大型星座、成千上万颗卫星测控需求,提出建设全空域多波束测控系统。传统抛物面天线一般采用A-E-T机械结构,在目标过顶前将天线倾斜轴预制到一个指定角度,克服了跟踪盲区,实现了过顶跟踪[1]。
区别于传统的抛物面天线,球面相控阵天线由于不包含驱动旋转的机械结构,一般采用波束滑动扫描方式实现天线的波束跟踪[2]。
在地基多目标测控方面,美国在航天测控领域提出了一种网格球形相控阵天线系统方案,为美国空军提供了全空域、多目标卫星测控[3-4]。国内学者对全空域测控系统建设进行了一系列研究[5-8],主要突破包括天线、波束形成、标校和跟踪等多个关键技术,其中半椭球空间天线桁架技术为全空域测控提供了一个重要的研究方向。
本文设计了一款全空域、多目标、等效口径xm的天线桁架,通过大跨度天线桁架保型设计技术、阵列天线多级调整及转站标校技术以及测试数据批量化处理方法,解决了天线桁架大尺度、高精度、可装拆的技术难题,实现了测控系统的高精度、过顶跟踪,为后续工程实践提供了一种有效的设计思路与标校方法。
1 大跨度、全空域天线桁架高精度设计
1.1 主要性能指标要求
全空域天线桁架的主要性能指标如下:
① 阵列天线位置精度:≤3 mm。
② 抗震等级:经历9级烈度以下地震不产生永久性形变。
③ 天线桁架主要几何参数:
直径≤12.5 m;高度≤8.0 m;质量≤40 t。
④ 阵列天线电性能。
第一旁瓣:≤-14 dB;差波速零深(同和波束比):≤-35 dB。
1.2 空间椭球型天线桁架设计
在覆盖全空域和一定增益的条件下,采用球面阵天线可减少阵元和T/R组件数量,降低系统成本。本文提出了基于单层空间椭球面网壳的天线桁架网壳结构,通过优化杆件截面、网架形式、跨度和高度等参数实现对天线桁架承载力的有效分配,具有强度高、刚度大和动态特性好等优点,显著增强了球形天线的动态特性,改善系统低仰角时的增益。空间椭球天线桁架实物如图1所示。

图1 空间椭球天线桁架实物Fig.1 Picture of spatial ellipsoid antenna truss
天线桁架由阵列天线、球形骨架、调整机构和基础预埋件构成,上百个天线子阵自下而上共14环,如图2所示。

图2 天线桁架整体结构示意Fig.2 Schematic diagram of the overall ellipsoid antenna truss structure
天线桁架是阵列天线的载体,是整个天线的主要受力体和结构支撑,采用空间椭球桁架构型。
天线桁架的阵列天线结构外形是一个准球面,高度方向的半轴大于水平方向的半轴,椭球的半长轴为7.2 m(Z轴方向),半短轴为6.4 m(X和Y轴方向),椭球方程如下:
(1)
2 计算仿真结果与分析
2.1 静载分析
采用商用PATRAN软件建立了大阵天线结构(含阵列天线)的有限元模型,并对其整体的刚度、强度进行了计算。
天线结构仅在重力作用下,结构整体位移云图如图3所示,图4和图5分别展示了自重状态下结构整体杆应力分布以及面应力分布。

图3 大阵天线结构静载整体位移云图Fig.3 Static displacement cloud image of the ellipsoid antenna structure

图4 大阵天线结构静载整体杆应力分布云图Fig.4 Static rod stress distribution cloud image of the ellipsoid antenna structure

图5 大阵天线结构静载整体面应力分布云图Fig.5 Static surface stress distribution cloud image of the ellipsoid antenna structure
2.2 抗震分析
采用商用PATRAN软件建立了大阵天线结构(含阵列天线)的有限元模型,并对其整体的刚度、强度进行了计算。
采用时程分析方法进行结构抗震性能验证,设计要求结构能够承受9级地震时不破坏。
时程分析法是一种动力分析法,在实际使用过程中能够更加真实地反映待分析结构的地震反应,所以也经常用来校对反应谱分析的结果。时程分析法采用运动微分方程进行逐步积分求解,能够得到待分析结构上各质点的位移、速度和加速度随时间的变化,从而得出待分析结构中各关键构件在地震持续时间内的动力响应[9-11]。
时程分析法采用直接积分对结构动力方程求解[12],基本原理如下:
(2)
时程分析法得到的往往是数值分析法得到的结果,比较常用的方法有线性加速法、龙格—库塔(Runge-Kutta)法、中心差分法和振型叠加法等[13-14]。
时程分析法可模拟结构在整个地震持续时间内各时刻的地震响应,可在抗震设计时进行优化设计和补充验算[15];可处理各种非线性问题,但其计算量大。地震响应计算值较大依赖于地震波时程曲线的选取[16],地震波采用中国天津(1976年)地震竖向记录[17],一般而言,人工地震波的反应谱曲线与设计反应谱吻合良好[18]。
根据《建筑抗震设计规范》[19],对某一典型的实际地震波进行调整,最终计算时采用如图6所示的地震波曲线,分析时间历程取20 s。

图6 地震波曲线Fig.6 Seismic wave curve
经过分析,天线与骨架连接螺栓最大应力随时间变化曲线如图7所示。
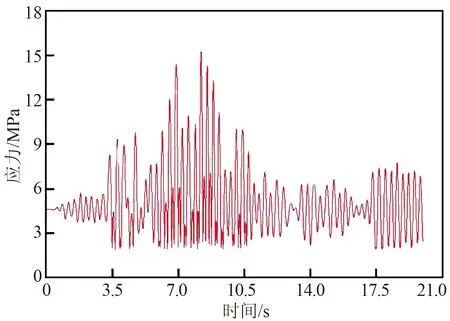
图7 连接螺栓最大柱应力的时间历程曲线Fig.7 Time course curve of connection screw maximum stress
由图7可知,t=6.9 s时连接螺栓的最大杆应力为294.1 MPa,当天线桁架连接选用8.8级螺栓时,其屈服强度可达640 MPa,可知此时螺栓强度满足要求。
天线骨架结构最大压应力随时间变化的曲线如图8所示。由图8可以看出,t=6.9 s时天线骨架最大压应力为95.1 MPa,而骨架所用材料的屈服强度可达245 MPa,所以骨架强度满足要求。

图8 骨架最大压应力的时间历程曲线Fig.8 Time course curve of framework maximum compressive stress
天线阵面单元最大应力随时间变化的曲线如图9所示。由图9可以看出,t=6.9 s时天线阵子中最大面应力为15.2 MPa,阵子材料为铝合金5A06,其屈服强度为140 MPa,结构满足强度要求。
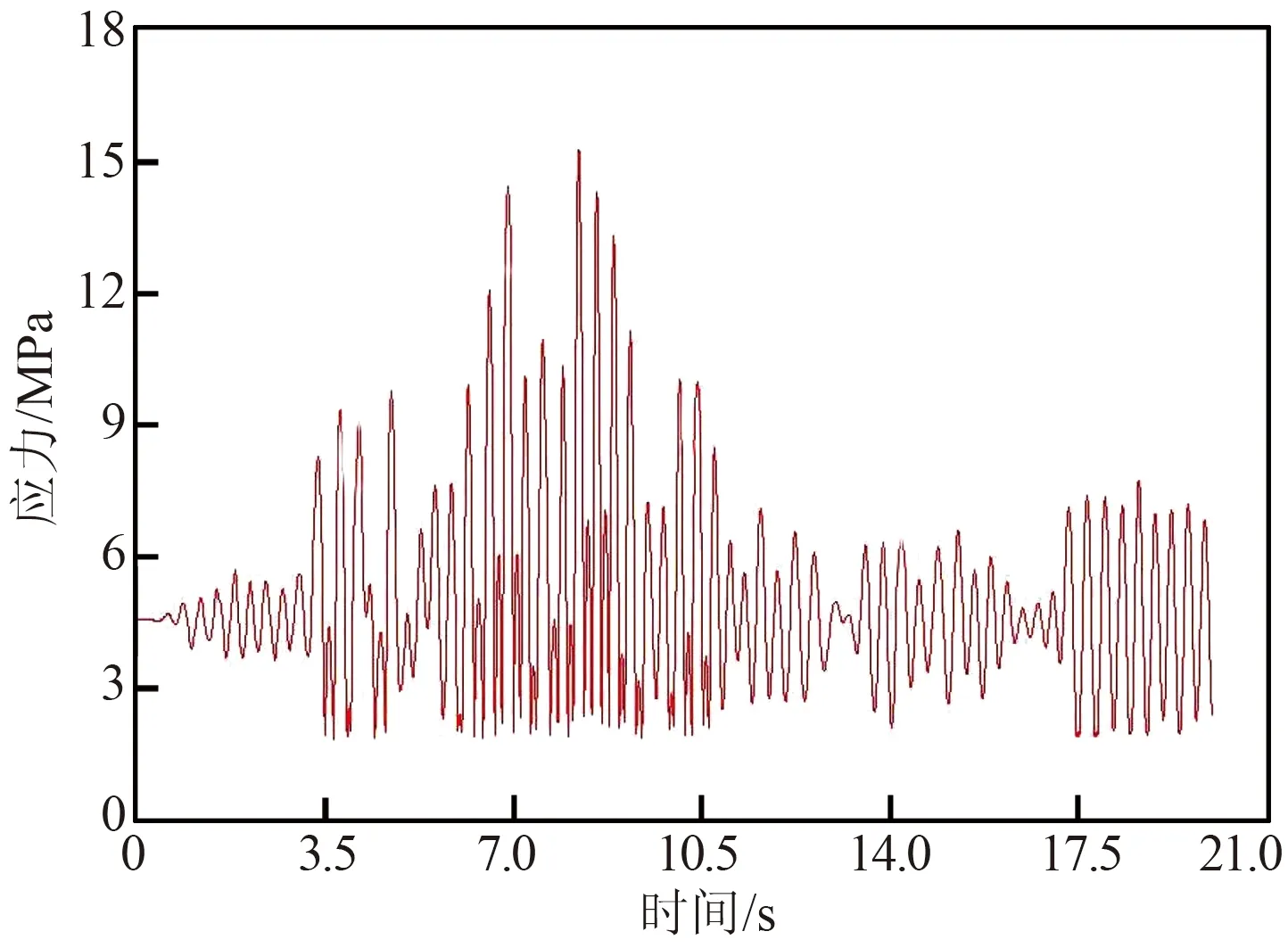
图9 天线阵面单元最大应力的时间历程曲线Fig.9 Time course curve of antenna element maximum stress
经以上分析计算,天线结构强度满足9级地震的抗震要求。
3 大尺度阵列三级精度调整及标校技术
大尺度天线桁架存在再装精度较差的问题,从而导致阵列天线的增益及指向精度下降。本文采用三级标校方案,有效保证了阵列天线的再装精度。
3.1 阵列预埋件一级现场标校
阵列预埋件由地基模板、调整板及地脚螺栓组成,通过12组地脚螺栓组合完成天线桁架与基础的连接。通过基础预埋件下侧12组下层固定板粗调、上部基准调整板精确定位技术,可实现大跨度阵列预埋件位姿精度的一级调整。
阵列预埋件标校完成后,为提高设备安装基础的刚性及稳定性,采用二次浇筑混凝土的方法浇筑预埋件,确保预埋件定位精确,如图10和图11所示。
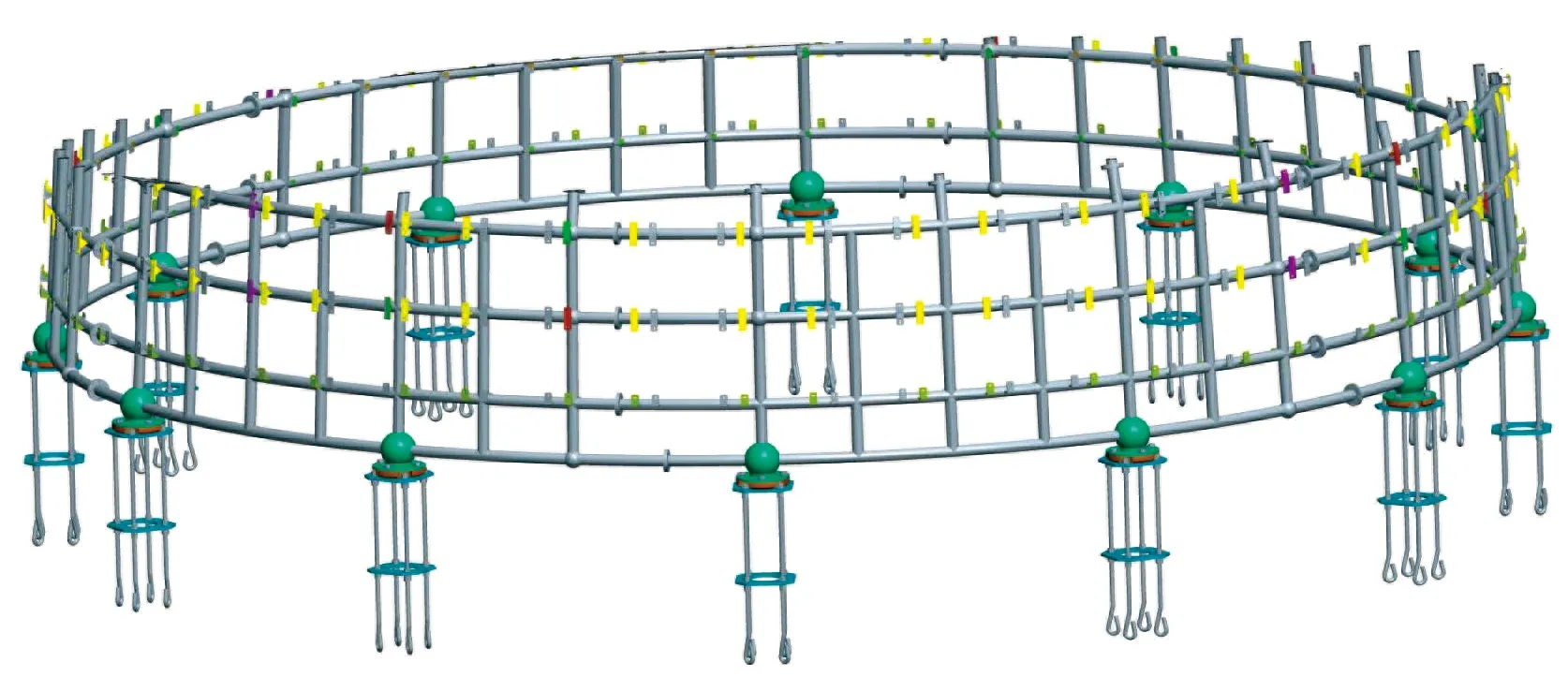
图10 阵列预埋件一级标校结构示意Fig.10 The first level calibration schematic diagram of array embedded parts

图11 阵列预埋件结构示意Fig.11 Schematic diagram of array embedded parts
3.2 球形骨架二级厂内标校
阵列坐标原点确定后,球形骨架上各点到坐标原点的距离可通过几何方式确定。球形骨架在场内试装时,借助高精度的全站仪测量系统,依次标定球形骨架外侧上千组基准板的精确坐标点位,借助特定工装,反复测量调整直至基准板满足5 mm的位置精度后,将基准板配焊接到球形骨架的相应位置,从而完成球形骨架位姿的二级厂内标校,如图12所示。

图12 球形骨架厂内二级标校示意Fig.12 Second level calibration of ellipsoid truss in factory
3.3 阵列天线三级现场标校
现场标校采用全站仪搭配spatial analyzer软件,在系统中构建出整个球阵天线的模型,每个阵列天线的4个角点均需定位出坐标并在软件中构建模型。
测控系统共7个天线测量墩(其中外部测量墩3个,内部测量墩4个),作为天线测量基准定位点,安装后需进行大地测量(内部测量墩布设于天线塔基一层房顶环墙内)。球形天线测量基础点布局如图13所示。
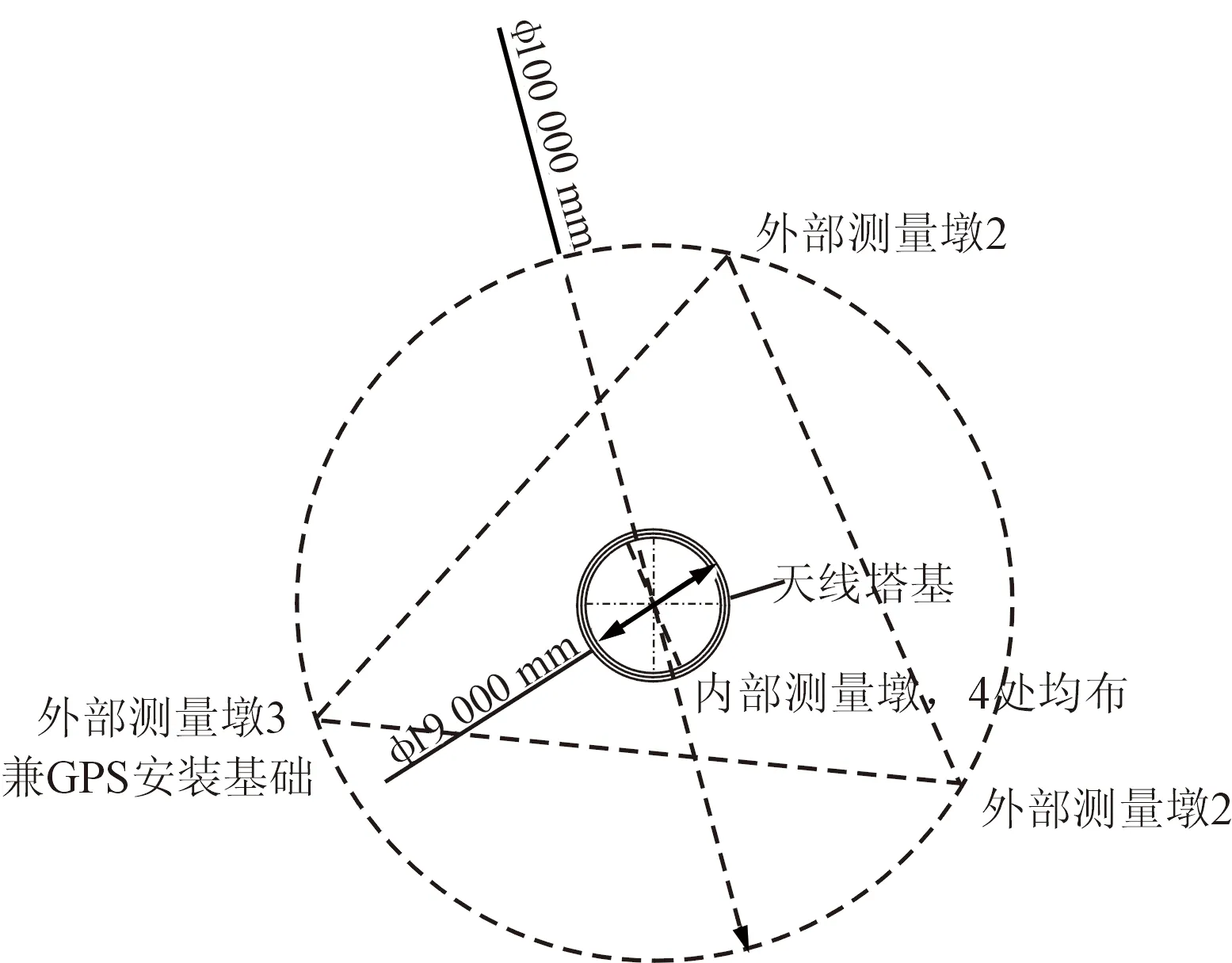
图13 球形天线测量基础点布局尺寸Fig.13 Layout dimension diagram of ellipsoid antenna measurement base point
通过7个测量墩的转站处理技术,将全站仪的测量实际位置与软件中理论位置相比对,通过调整支座上横向、纵向长圆孔可实现阵列天线位姿的横向、纵向调整;通过调整螺栓的纵向移动可实现阵列天线位姿的法向调整。依次测量调整各阵列天线至其满足3 mm的位置精度后,在阵列天线的相应连接位置锥销定位,螺钉固定,从而完成阵列天线位姿精度的三级现场标校,如图14所示。

图14 阵列天线现场三级标校示意Fig.14 Third level on-site calibration of the array
4 阵列天线标校数据批处理分析
整个测控系统中的阵列天线数量庞大,天线桁架安装过程中需精确标校1 888组阵列天线的空间测量点坐标。本文提出了一种针对球阵天线测量数据高效处理的专用软件工具,主要功能是将阵面单元测量点坐标拟合、平移、求解并自动生成测量报告。
目标点坐标通过已知向量计算得出,计算方法示意如图15所示,其中A,B,C,D为理论点,A′为实测点。A′应满足:
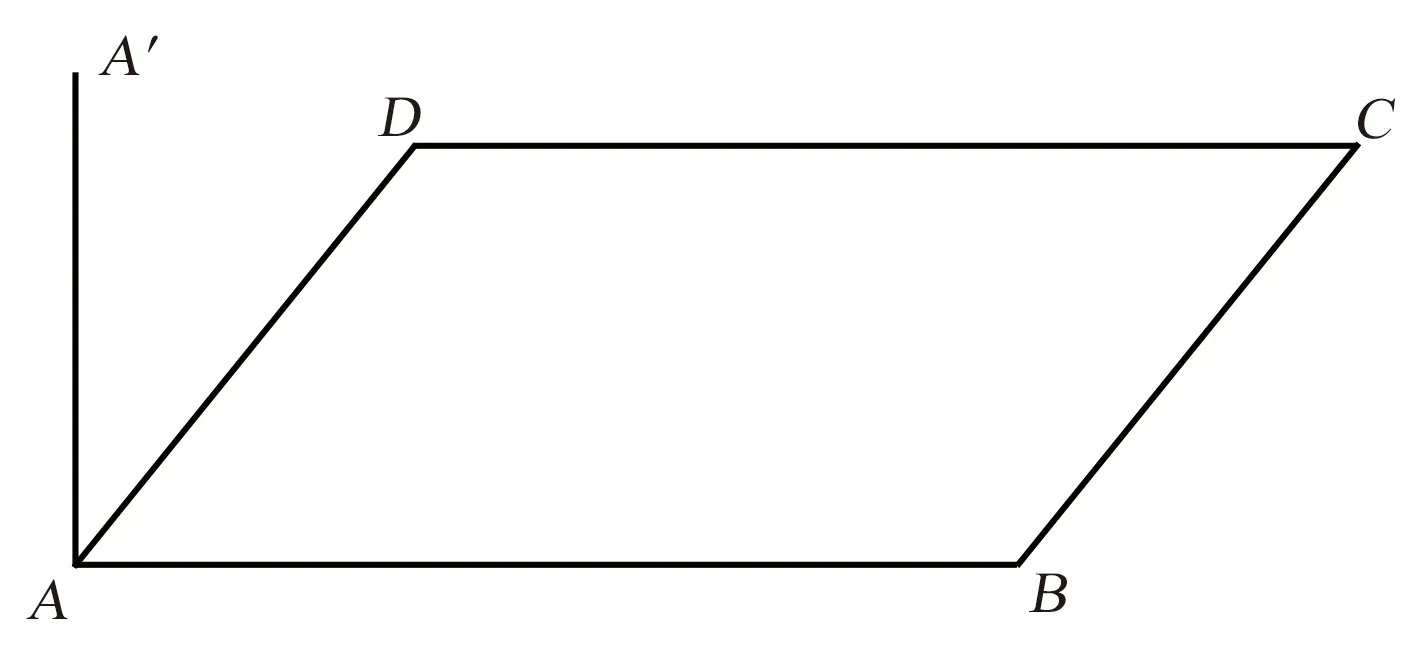
图15 计算方法示意Fig.15 Calculation method diagram
AA′·AB=0 ,
(3)
AA′·AD=0 ,
(4)
|AA′|=0 。
(5)
该软件工具可批量处理大规模阵列天线上千个测量单点,相较于手工计算,可节约90%的工作量,具有高效率、高准确度等优点。专用大数据处理软件流程如图16所示。
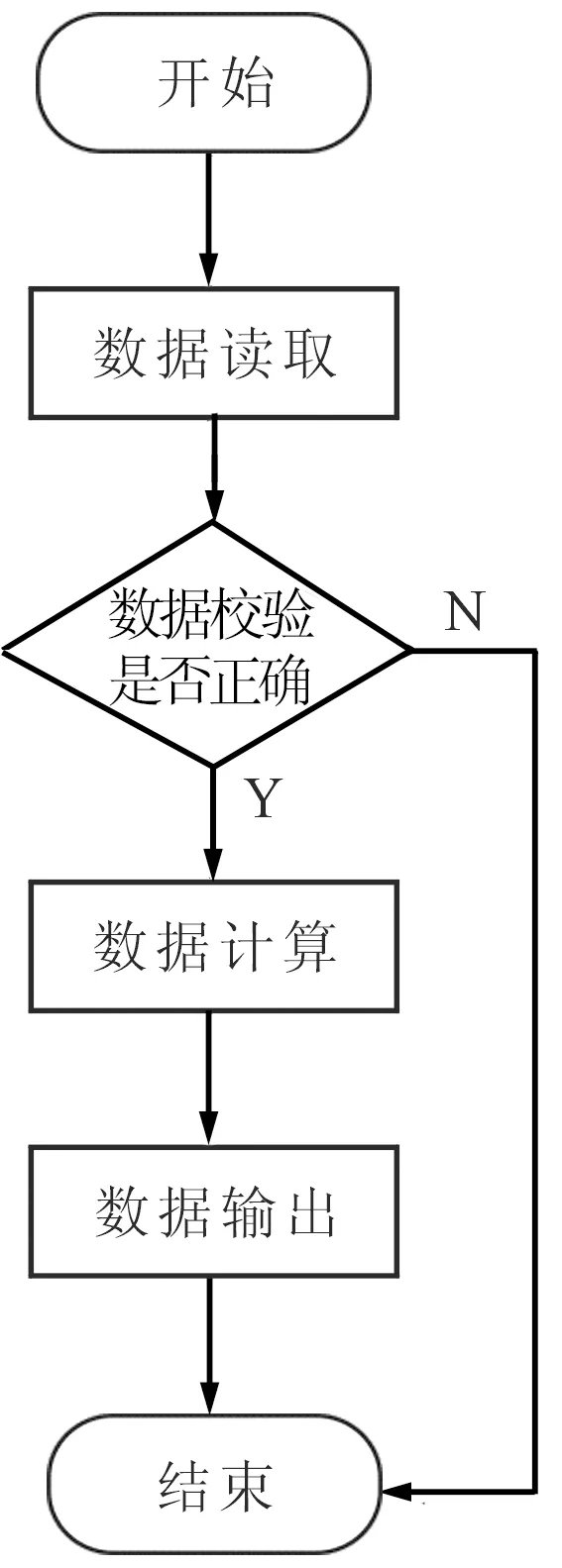
图16 阵列天线标校数据批处理软件流程Fig.16 Data batch processing software flow chart of array antenna calibration
5 测试结果分析
5.1 天线桁架现场标校结果
对天线桁架阵列天线的位置精度进行了实际测试。全空域测控系统建成实物如图17所示。阵列天线现场标定结果如图18所示。结果表明,所有阵列天线的位置精度均在3 mm以内,满足要求。
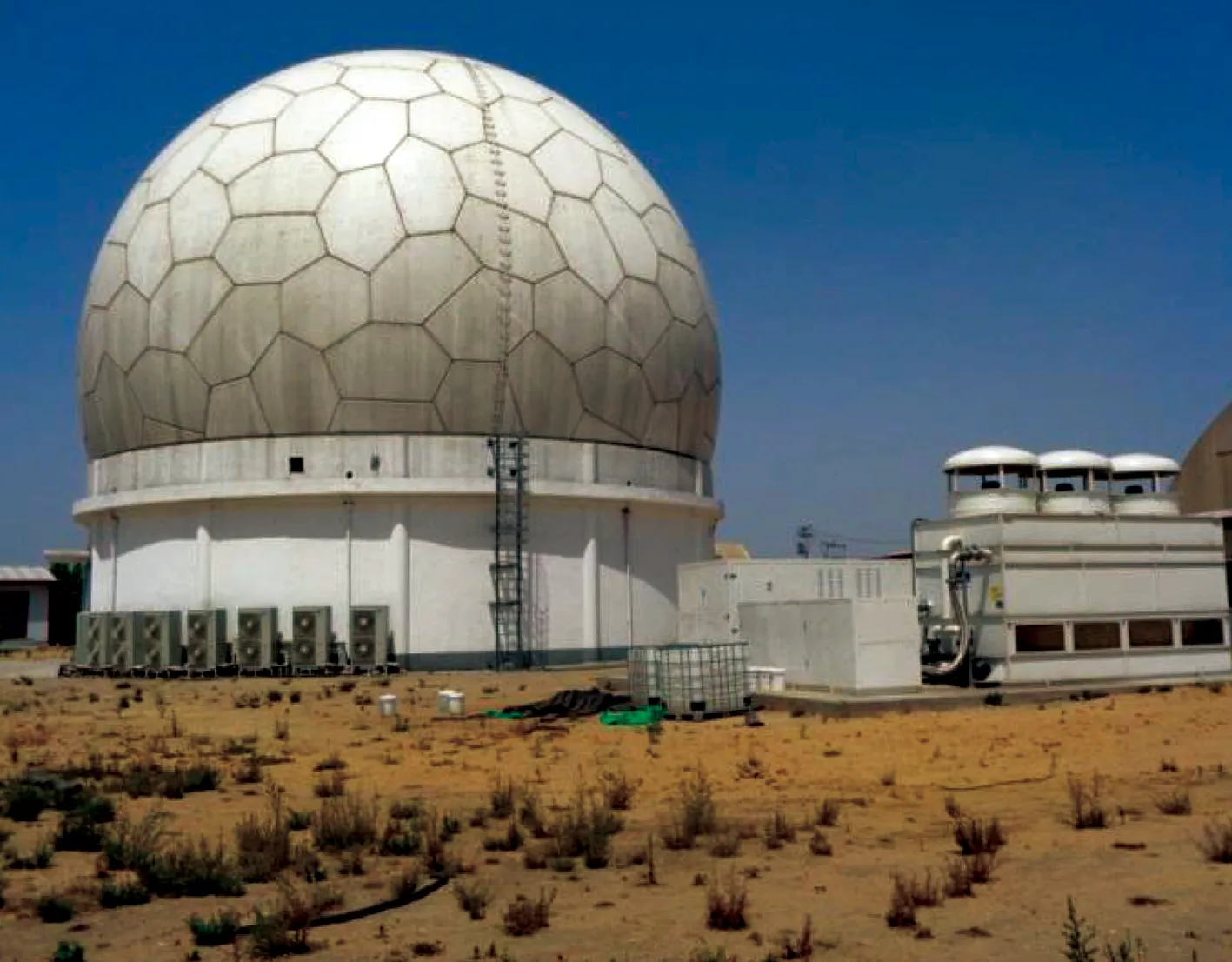
图17 全空域测控系统实物Fig.17 Picture of global measurement and control system

图18 阵列天线现场标定结果Fig.18 On-site calibration results of the array antenna
5.2 系统实测结果
经过现场测试,测控系统的接收G/T值、旁瓣和差波束零深均满足设计要求。本文给出测控系统在典型频点的测试方向图如图19~图21所示。

图19 方位合成方向图Fig.19 Azimuth composite pattern

图20 俯仰合成方向图Fig.20 Elevation composite pattern
综上可知,研制的全空域天线桁架达到了设计预期的各项性能指标,天线桁架配合测控系统在现场完成了电气测试,测试结果满足要求,达到了预期效果。
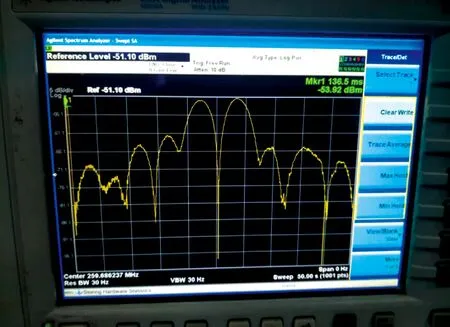
图21 差方向图Fig.21 Differential pattern
6 结束语
本文设计并工程实现了一种新的空间椭球天线桁架,并给出了一种高精度三级调整及标校方法,满足了测控系统全空域、大跨度、高精度和高刚度的要求。主要技术创新点为基于单层空间椭球面网壳理论,提出了单层空间椭球面网壳的天线桁架结构;提出了一种新型分级式地基预埋件结构,克服了大型天线拼装地基模板成本高、调整复杂的缺陷,实现了大跨度阵列预埋件位置精度的精确调整;提出了一种大型立体阵列综合标校方法,实现了大尺度阵列的长期免标校运行。从天线桁架的阵列天线标校结果和系统整体的现场测试效果来看,空间椭球型天线桁架具有优良的性能,可实现中低轨道卫星的高精度过顶跟踪,具有重要的工程借鉴价值。
