基于激光雷达点云的配网带电作业机器人的目标识别
2023-02-18胡益菲李聪利张黎明李承霖李博彤
胡益菲,李聪利,张黎明,李承霖,李博彤
(1.国网天津市电力公司 滨海供电分公司,天津 300457;2.国网天津市电力公司,天津 300143)
0 引言
随着传感器和机器人控制技术的迅猛发展,机器人已在许多高风险行业取代人工作业。配电网带电作业存在极大安全隐患,适合用机器人代替人工作业[1]。配网带电作业机器人是一种用于配电网作业的智能设备,近年来在智能电网领域备受关注。配网带电作业机器人可有效完成带电线路的断开和连接任务,提高作业安全性,扩大作业范围。
在配网带电作业机器人方面已经进行一些研究。Li等[2]提出了一种基于云计算终端和边缘计算终端的带电作业机器人智能管理和控制方法;Liu等[3]提出了机器人的弱刚性控制算法和大延迟主从控制算法;Zhao等[4]研究了用于农业配电网的带电作业机器人的主从控制远程作业;Tong[5]设计了一种具有多机械手的配网带电作业机器人。现有研究主要专注于配网带电作业机器人的控制和组态设计,没有涉及感知功能的研究。对于作业场景的感知,Zhu等[6]提出了一种基于立体摄像头对配电网作业线进行识别并实现机器人的定位的方法;Ren等[7]提出了一种基于摄像机和激光雷达相融合的机器人定位方法。这些研究在一定程度上利用了环境信息,但对作业场景仍缺乏了解。此外,这些研究均依赖于相机,很容易受到光照和外部干扰的影响,因此应用范围受限。
与相机相比,激光雷达受光照影响较小,能适应全天候作业的要求。Melzer等[8]提出了一种利用2D Hough变换和随机样本一致性(RANSAC)从机载激光扫描(ALS)数据中提取电力线的方法;Jwa等[9]使用基于体素的分段线检测器(VPLD),通过在不同信息级别上分组相似特征来重建电力线;Sohn等[10]采用马尔可夫随机场(MRF)改进方法[9];Zhu等[11]提出了一种基于统计分析和基于2D图像处理技术的森林环境电力线自动检测方法;对于激光雷达场景分割,Arastounia等[12]提出了一种基于点邻域的变电站激光雷达点云中平面区域的分割方法;Gonzalez-Aguilera等[13]和Wu等[14]实现了变电站的现场重建;Gonzalez-Aguilera等[13]将点云映射到CAD模型中;Wu等[14]通过构建数据库,将扫描到的激光雷达点云与之匹配,对变电站场景进行了重建;Arastounia等[15]提出了一种基于主方向的激光雷达点云分割方法,并利用先验信息对绝缘子进行识别,他们将该方法扩展到文献[16]中,利用几何特征实现了变电站激光雷达点云中更多目标的识别。这些方法充分利用了激光雷达的优点,但只能用于变电站等相对固定、常见的场景,不适用于配网带电作业机器人复杂的作业场景。此外,上述识别算法仅使用几何信息作为约束条件,在某些复杂环境下可能效果不佳。
带电作业机器人的作业场景通常很少有规则的形状,尤其是在野外条件下。因此,仅基于几何特征的方法在这些场景中很可能会失效。再者,如果在此类场景中无法获取大量点云数据,则基于PointNet[17]、HVPR[18]和SESSD[19]等深度学习的识别将会失效。
为进一步了解配网带电作业机器人的作业场景,拓宽其应用范围,本文提出了一种基于激光雷达点云数据的目标识别算法,能够准确、稳健、快速地对作业现场的各种电器进行分割和识别。
本论文的研究成果如下:
1)提出了一种基于激光雷达点云的配电网现场作业机器人目标识别算法,该算法至少可识别3种目标,包括电杆、机械臂和电力线。
2)将几何特征识别和基于最小二乘估计的迭代优化融入点云识别,可取得极好识别效果。
3)在实际作业场景中充分实验,验证所提方法的准确性、稳健性和有效性。
1 点云数据处理综述
使用下列符号对所提方法进行综述:Pl为通过激光雷达获得的初始点云;Po为作业区域的点云;Pp为电杆的点云;Pc为机械臂的点云;Pw为电力线的点云。
所提方法的系统概述如图1所示。输入整个系统的是通过激光雷达扫描的点云。输出的是3种电气设备的识别结果。首先,对通过激光雷达扫描的点云Pl进行预处理从而获得作业区域Po的点云。预处理包括缩减像素采样、地面清除和去异常值。然后利用电杆Pp和机械臂Pc的几何特征提取电杆Pp和机械臂Pc的点云。然后,采用基于最小二乘法的迭代优化方法,利用几何约束对Pp和Pc进行优化,获得更精确的电杆和机械臂。根据Pp和Pc提供的信息,从剩余点云中进一步提取电力线Pw的点云。最后,将识别出的3种电气设备投影到Po上,得出识别结果。
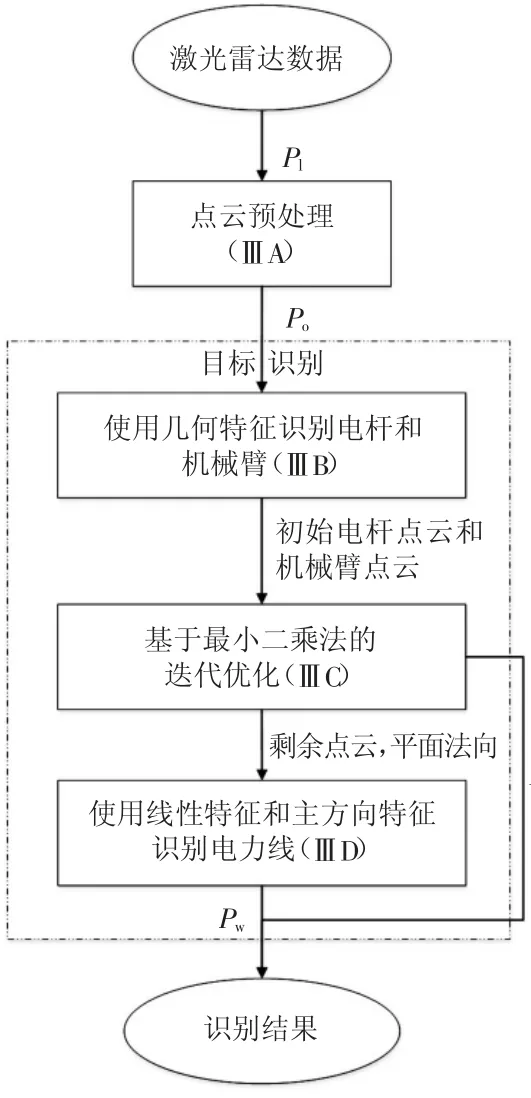
图1 算法过程概述
2 点云数据处理算法
2.1 点云预处理
对初始点云Pl进行预处理获得作业区域Po的点云。鉴于激光雷达附近点云数据量大、密度高,首先对点云Pl进行缩减像素采样。具体而言,构建1 cm大小的体素格网。由于激光雷达测量误差随距离增加而增大,因此对于各个网格,保留距离激光雷达最近的点,清除其他点。缩减像素采样后,通过构建高度直方图清除地面上的点,并对其余点云进行空间分离。然后通过欧氏聚类提取保留Po。由于激光雷达扫描过程中存在一定误差,点云中难免会包含一些异常值。因此,在Po上执行异常值清除。对于Po中各个点,我们计算各个点和其所有相邻点之间的平均距离。根据均值和标准差假设高斯分布,与均值间的距离超过标准范围的点为离群点。最后获得了更精确的作业区Po的点云,如图2所示。清除干扰点,完好保留作业区的点。

图2 预处理结果
2.2 电杆和机械臂识别
利用电杆和机械臂的几何特征对其进行检测。具体而言,作业区域Po给定的点云,选择满足nz<阈值的点生成点云Pm,其中nz为点在Z轴上的局部法向分量。一般而言,在实际作业中,配电网带电作业机器人通常以大致平行于地面的方式采集数据,因此电杆上大部分扫描点都在Pm中。通过欧氏聚类获得Pm的最大连通区域,提供初始电杆结构。
给定电杆Pp的点云,采用基于主成分分析(PCA)的点云几何特征估计计算Pp的主方向。之后,对具体方法进行讨论。据此,算法1中给出伪代码。
主成分分析(PCA)是一种常用的点云分析法,通过计算点云分布矩阵的特征值获得其几何特征。对于输入点云,我们首先使用式(1)计算其质心Pc,其中n∈N为点数,[xi, yi, zi]T∈R3为第i个点的笛卡尔坐标。

然后使用式(3)中给出的特征值分解计算分布矩阵的特征值和特征向量,其中,Λ = diag{λ1,λ2,λ3}和Q= [q1,q2,q3]T分别表示特征值和对应的特征向量。

最大特征值对应的特征向量就是点云的主方向。
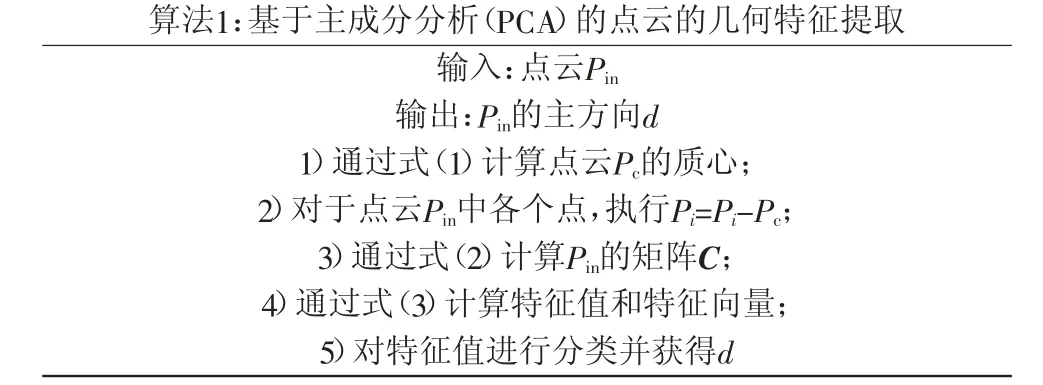
表1 点云几何特征提取算法
为识别机械臂,对比一个滑动窗口,其大小wh设为略大于机械臂的宽度。鉴于机械臂近似平行于激光雷达坐标系的Y轴,因此滑动窗口的方向设为沿Y轴。通过沿电杆主方向滑动窗口,确定各个机械臂的可能高度范围。对于每个可能的高度范围,计算Z轴方向上的点的方差,排除标准差大于临界值(设为机械臂宽度的一半)的点,其余点视为机械臂上的点。
2.3 迭代优化
鉴于激光雷达在扫描时绕俯仰轴和偏航轴旋转,在III-B中对初始电杆和机械臂的识别存在一定误差。尤其是激光雷达坐标系的机械臂平行于Y轴、电杆平行于Z轴的假设并未完全得到满足。因此,采用基于最小二乘法的平面拟合方法进一步优化识别结果。采用最小二乘法拟合初始电杆和绝缘机械臂上的点,按照式(4)确定损失函数,其中,np∈R3为平面的单位法线。

获得平面后,选择Po中与平面之间距离小于阈值(设为5 cm)的点形成点云P平面(Pplane),利用算法1计算Pplane的主方向,表示为dp。利用式(5)确定旋转矩阵Rp,其中np为平面法向。

通过Rp转化Po中所有点,从而旋转Po,使电杆平行于Z轴,机械臂也平行于激光雷达坐标系的Y轴。再从旋转后的点云中迭代提取电杆和机械臂,直至平面主方向收敛。算法2中给出这部分的伪代码。

表2 迭代优化的点云提取算法
2.4 电力线识别
从作业区Po点云中清除电杆点和机械臂点后,对剩余点云进行欧氏聚类分割,进行进一步分析。通过计算点云的直线度和主方向与平面法向的夹角来确定被分割的点云是否为电力线。线性度Lλ描述点云相对于直线的近似度,按式(6)确定[20],其中,e1和e2分别为点云分布矩阵的最大特征值和第二大特征值。

通过式(7)计算点云主方向和平面法向夹角α,其中,dp∈R3为III-C中拟合的平面法向。

如果点云的Lλ大于阈值(设为0.9)且α小于另一阈值(设为5°),视点云为电力线。
3 算法验证实验
为验证本论文方法的有效性,在配网带电作业机器人的实际作业场景中进行了识别实验。通过在机器人上安装旋转器的SICK激光雷达获得初始点云。在3个不同复杂度的场景中进行实验,每个场景扫描10次,得到10个点云。3个场景的识别结果如图3所示,其中,场景1是干扰点较少的简单场景,场景2是干扰点较多的复杂场景,场景3是干扰点很多的最复杂场景。绿色部分为电杆Pp的点云,紫色部分为机械臂Pc的点云,红色部分为电力线Pw的点云。

图3 识别结果
为定量评价本文方法的准确性,我们对获得的30个激光雷达点云的电杆、机械臂和电力线手工进行了标记。用查全率和查准率来评价该方法的性能。查全率是已识别的标记物体占所有识别物体的比例,而查准率是已识别物体占所有识别物体的比例。计算每种场景下的查全率和查准率,结果如表3所示。
从表3可以看出,本文所提方法对3个不同目标均取得了良好识别效果。3个场景中电杆的查准率和查全率均达到了100%,而其他2个目标的识别查准率和查全率也保持在96%以上。

表3 识别物体的查准率和查全率%
为进一步证明所提方法的准确性和迭代优化所带来的改进,对给定的30个点云进行了对比实验。选择仅利用几何信息的方法作为比较法,这是激光雷达点云识别中常用方法。我们的实际情况是,仅使用III-B中提到的几何约束来识别电杆和机械臂。识别电力线时,仅考虑线性约束,不考虑III-A中提到的平面信息。计算各个场景的查全率和查准率,结果如表4所示,其中方法1为本文所提方法,方法2为比较法。

表4 不同方法的查准率和查全率%
结果表明,通过迭代优化,本文所提方法取得了较好识别效果。对于所有30个点云,保证电杆识别查准率的同时,我们的方法实现了较高查全率,提高率为3.22%。对比比较法,机械臂识别的查准率提高了1.08%,查全率提高了19.64%。识别电力线时,查全率虽然降低了0.56%,但查准率提高了21.02%,达到100%。综上所述,迭代优化提高了目标识别的准确性。
从表3可以看出,本文提出的目标识别方法在3个不同复杂程度的场景中均取得了良好识别效果,表明该方法具有较强稳健性,能够应对配网带电作业机器人实际作业中的不同场景。
用于实验中30个点云的所提方法的运行时间如图4所示。不同颜色表示在不同步骤中消耗的时间。可以看出,随着场景复杂度的增加,时间也在一定程度上增加,主要是因为预处理需要消耗较多的运行时间来处理复杂的点云数据。所有30个点云消耗时间在1.3 s以内,简单场景消耗时间在1.0 s以内,满足配网带电作业机器人实时目标识别的要求。
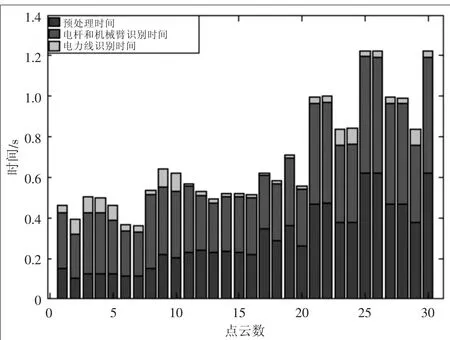
图4 所提方法所消耗时间
4 结论
本文提出了一种基于迭代优化的配电网带带作业机器人目标识别方法。我们首先采用几何约束对初始电杆和机械臂进行识别,然后采用基于最小二乘估计的迭代优化对识别结果进行优化。识别出的电杆和机械臂用于创建一个平面,为后续识别电力线提供方向约束。最后,利用方向约束和线性约束对电力线进行识别。通过这种方法,可从激光雷达点云中准确识别出3种不同目标。对该方法在实际作业场景中的识别结果进行了定量评价,证明迭代优化大大提高了识别准确度。通过在不同复杂场景下的实验,证明了该方法的稳健性,同时也满足了实时作业的要求。本文所提方法提高了配网带电作业机器人的感知能力,提高了机器人的智能程度,扩大了应用范围。
