湖北烟田地块特征与田间作业农机适用性分析
2023-02-17吴元华申国明徐晓波陶德欣尹刚华
吴元华,申国明,王 勉,徐晓波,陶德欣,姜 芳,刘 阳,尹刚华
(1中国农业科学院烟草研究所,山东青岛 266101;2湖北省烟草公司,武汉 430030;3湖北省烟草公司恩施州公司,湖北恩施 445500;4湖北省烟草公司十堰市公司,湖北十堰 442000;5湖北省宜昌市烟草公司兴山营销部,湖北兴山 443700)
0 引言
烟草农业生产机械规模化应用和全程农业生产机械化推进,有利于降低劳动强度,提高生产效率,保障烟叶原料生产可持续性发展。随着中国农业机械的快速发展,以及种植模式多元化,传统农业机械选型配置方法已较难满足生产实际需求,合理的农机选型配置方法,在农机应用推广中,作用越来越突出[1-2]。围绕不同角度农机配置方法研究报道较为广泛,并且多集中在水稻、花生等作物,重点围绕农机作业成本、作业质量、必要性和安全性等方面[3-5],这些方法的配置理论主要采用经验法[6-8],较适用于平原区域集约化、规模化种植条件下农机选型配置。丘陵山区烟田面积较小,分布不规则,地形较为复杂,生产环节所需农机类型与之差别较大,传统的农机配置方法适用性差。当前国内围绕丘陵山区烟草种植农机配置的相关研究较少,樊国奇等[9]以烟草不同生产环节作业时限为因变量,以不同农机数量为目标函数,研究确立了烟叶生产基地单元农机配置方法。陈浩等[10]将作业效率和作业面积模糊化,运用模糊线性规划提供了烟草种植机械配置新思路。
从当前丘陵山区烟草农业生产机械使用现状分析,烟草种植不同作业环节农机产品较为全面和成熟,但并非所有机械都适用于丘陵山区。以湖北烟区为例,湖北烟区烟田分布具有自身的区域特点,既有连片度较高、地形较为平整的山间平地,又有丘陵山区坡地,农机作业条件不统一。山间平地类似平原区域,但地块面积较小,地块形状复杂。受传统种植习惯影响,烟叶生产精耕细作,对农机作业质量要求较高,农机与田间作业条件匹配程度成为当前全程农业机械生产全面推进的制约因素。
本研究以湖北全程机械化核心示范区的鹤峰燕子镇荞云村为试点,通过历年农机的配置使用状况进行质量可靠性分析,筛选出适用于本地生产条件下的耐用机型和品牌,明确不同机型田间作业空间需求,为农机配置方法构建,以及区域以点带面烟叶农业生产机械化农机配置方法建立提供依据。
1 研究区概况与数据来源
1.1 研究区概况
以湖北鹤峰县燕子镇荞云村山间平地烟田作为农机选型和数量配置方法研究对象。该村位于东经110.305366°,北纬30.079830°,属于典型山区气候,低山河谷温和多雨,高山冬寒夏凉,年均气温12℃,年降雨量约1780 mm,全年无霜期220~240 天。土壤以黄棕壤为主,土壤质地松散,农田耕层深度约20~25 cm。燕子镇荞云村素有烟叶生产“万担乡、千亩村”之称,是全省烟草农业生产全程机械化核心示范点,山间平地地块连片度高,地形平整,适宜开展相关农机作业试验。全村6 个村民小组,总人口1002 人,286 户,劳动力人口548 人,总耕地面积141.1 hm2,其中2021年烤烟种植面积133.3 hm2,种植户35户。
1.2 农机配置适用性考虑因素
农业机械机型与地块匹配度标准是最终覆盖整个作业场地。在田块面积小、形状不规则、分布密集无规律的非平原地区烟田,作业环境更为复杂。农业机械转弯直径往往大于作业幅度,农机作业路径根据田块作业条件,尽量不留有遗漏区域;根据田块地头空间特性,以尽可能小的地头转弯空间,尽量不影响已作业或未作业区域内土壤或烟株原有状况;根据作业模式,明确已作业区域可以二次碾压或未作业区域不可以二次碾压;以及农机车辆倒车性能,能否田间倒车等。
1.2.1 农机类型 田间作业农用机械按动力配置方式分为牵引式和自走式;按行驶机构特征分为轮式和履带式;按转向方式分为阿克曼转向、差速转向和铰接转向等几种形式[11-14]。
烟草农业生产牵引式作业机械主要是轮式拖拉机,配套作业机具包括翻耕犁具、浅翻旋耕机、施肥起垄机、覆膜机、拔杆机。自走式农机主要是小微型田间作业机械。农机田间作业更多考虑机型作业空间需求与地块条件匹配度,尤其是大中型机械,机型作业幅宽、转弯半径、转弯空间,都是需要考虑的因素。
阿克曼转向又称轨迹转向,是拖拉机等轮式结构农机的转向方式,转向弯度最大,转向复杂性最高;差速转向又称滑移转向或单侧制动转向,转弯半径最小,常用于履带式农用机械和两轮作业农机,轮式车辆车轮加装独立驱动也可以实现;铰接转向相对整体式车架车辆农业作业机械,主要用于铰接牵引式农机转向。
1.2.2 田间作业路径 基于农用机械田间运行平稳性、田间最佳转弯、调头路径规划一般有2种方式[15-17].
(1)方向平行路径作业,沿固定方向作平行交替移动,即地头180°反向运行掉头操作。根据作业幅度与农机最小转弯半径之间关系,又分别采用3 种不同转弯方式:“Π”(π 的大写字母)、“Ω”型和“T”型。其中“T”型转弯方式适合更小的作业幅宽,比“Ω”型占用更小的辅助地头面积和路径长度,一般不推荐牵引式农机使用。
(2)轮廓平行路径转弯。沿地块边界轮廓平行路径作业,在需要转弯地头进行小于180°换向动作。
1.2.3 烟田作业条件 影响农机入田、田间作业因素分类。一是地块形状,一般分为规则烟田(矩形)、较规则烟田(梯形)和不规则烟田(不规则多边形、三角形)。二是种植规模,农机田间作业空间需求;三是地块通达度,农机入田作业机耕路条件。
1.2.4 农机作业模式 翻耕地、整地、施肥、起垄、覆膜、移栽、田间管理、采收、拔杆等作业模式。不同作业模式农机碾压特性受到作业环境约束不同。比如田间作业不破坏垄体、车轮与地面接触不轧苗、机身不损伤烟株和叶片。
1.3 数据来源
无人机航拍收集田间图像,运用南方CASS9.1 软件形成田间地块分布图,实地调查访问获取分布图中田块属性数据;计算获取烟田面积、长度、宽度、田间道路等矢量数据。全县机械购置、使用数据库调取2011—2021年农机机型分布及使用状况;农机参数性能来源于基于物联网的企业信息平台。
2 研究方法
2.1 农机田间作业空间算法
转弯是农机田间移动作业的基本操作,除履带式农机,一般都需要迂回空间完成转向动作,不同机型机身尺寸、轮距、机体重量作业空间需求不同。研究机组转弯运动时,首先要找出整个机组运动的中心点,不同机组类型,机组中心的水平投影面内的具体位置不同。双轮单轴驱动机组,驱动轴中点即为机组中心;四轮(双轴)驱动机组,两驱动轴中点连线的中点为机组中心点;四轮驱动折腰式机组,折腰点为机组中心。转弯时机组中心运行曲线的半径即机组的转弯半径,一般用“R”表示。
针对转弯策略生成原理,朱亚坤等[18]和黄小毛等[19]提出2种作业路径生成方法,见图1。

图1 农机田间作业空间算法原理示意图
2.1.1 轮廓平行方式田间作业路径生成方法 农机沿田块边界轮廓向内作螺旋型移动,在田块边界轮廓拐点附近进行换向运行,两条作业路径属于相交关系。农机转弯路径按地块形状、转弯条件,影响前后2条相交路径夹角大小,形成锐角和钝角2 种类型作业路径。计算方法见图2,切点间圆弧即为转弯路径。
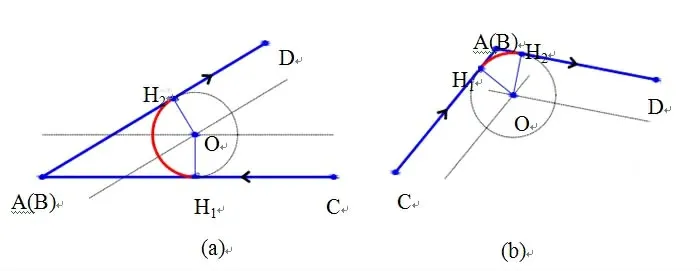
图2 轮廓平行路径作业转弯方式示意图
2.1.2 方向平行路径田间作业路径生成方法 农机向一个固定方向作平行交替移动,根据作业幅度与最小转弯半径关系,分别采用“Π”型(或U型)、“Ω”型(梨形)和“T”型(鱼尾形)转弯方式,当转弯半径小于作业幅度的1/2时,优先采用“Π”型(或U型)。转弯半径大于作业幅度的1/2 时,采用“Ω”型或者“T”型转弯方式。计算方法见图3,图3a 平滑曲线AH1H2B 为Π 型转弯路径;图3b 平滑曲线AH1H2B 为“Ω”型转弯路径;图3c为“T”型转弯路径,适用于辅助地头面积小、转弯路径长度短的具有倒车性能的农机作业。
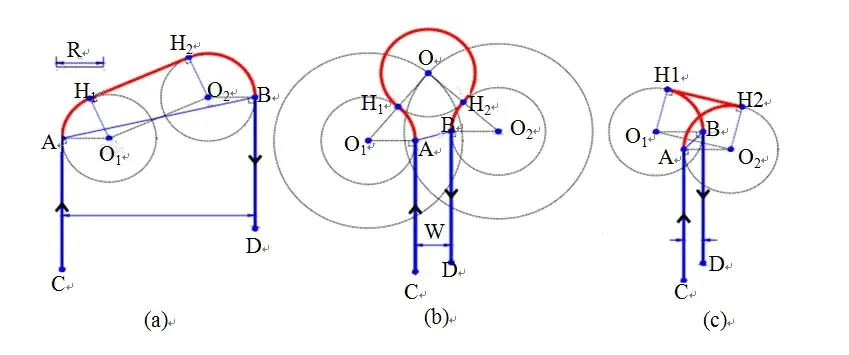
图3 方向平行路径作业时的不同转变方式示意图
2.2 农机转弯半径算法
为保证农机转向不产生滑动,最小转弯半径的大小由车辆的轴距决定,轴距长则转弯半径大。
最小转弯半径和最小转弯宽度的计算见公式(1)、(2)。

其中,R为车辆最小转弯半径,m;L为机械机身长度,m;W为机械机身宽度,m;D为农机最小转弯宽度;Ψ为农机转向最大转角,度。
2.3 轮廓转弯路径距离算法
弧形面积、弧长和空间满足率的计算见公式(3)~(5)。

其中:S为弧形面积;L为弧长;R为半径;n为圆心角度数。

2.4 数据处理
利用Excel表格统计软件进行相关统计运算。
3 结果与分析
3.1 作业地块信息统计描述
由表1 可以看出,烟田面积从小于667 m2的微型地块到大于3335 m2的较大型地块,其中2001 m2以上地块面积占总调查地块数量的44%左右,667~2001 m2地块数量占43%左右。地块形状分为三大类,规则-不规则三角形、规则-不规则梯形和规则-不规则矩形。2001~3335 m2种植规模地块形状主要以梯形和矩形为主,约占总地块数的93%左右,3335 m2以上种植规模梯形和矩形地块约占总地块数的89%左右,从形状分布看,地块规整度较高。1.5~2 m宽幅的机耕路主要是集中在靠近乡道地块,其次是小于0.5 m 的田间小路和1 m 左右机耕路。由表2 可以看出,受田间地块分布排列影响,机耕路与地块随机排列,道路宽度与地块形状和面积之间没有固定规律。
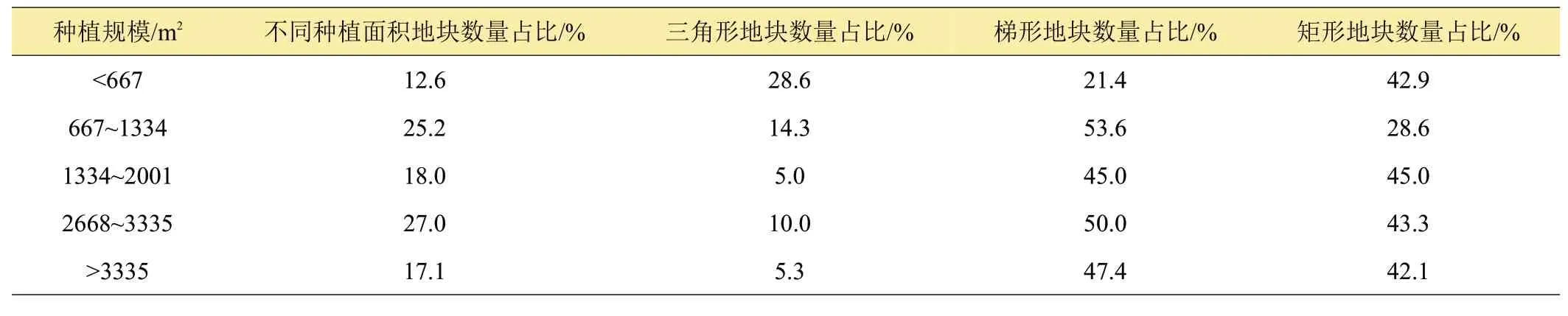
表1 地块种植规模与形状分布
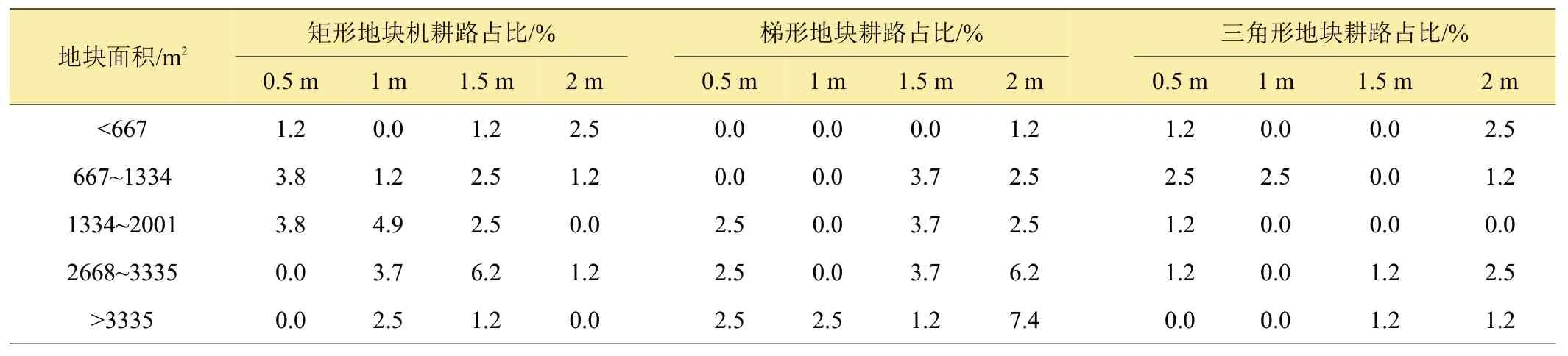
表2 农机入田条件调查
3.2 农机作业空间
3.2.1 作业移动点不固定作业环节空间需求 田间翻耕地作业环节,农业机械根据农艺标准要求,完成耕层土的松动,满足烟株根系下扎、空间合理分布生产要求即可,对作业路径无特别要求,因此,翻耕地以轮廓平行方向方式实现田间作业方向转换,来适应不同地形需求;其次烟杆拔除环节,同样可以使用大中型农机实现这种非固定作业路径的田间作业。由表3 可知,不同转弯半径机型转弯空间与地头转弯角度呈线性关系,地边转弯角度越小,农机转弯空间越大,农机轮廓平行方向转弯空间的需求与地块形状密切相关。图4 显示,地头角度越大,地边遗漏未作业区域越大。
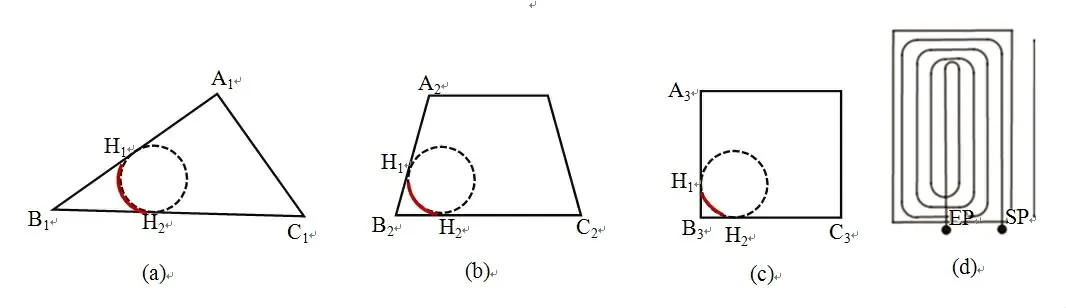
图4 不同形状地角转弯弧度
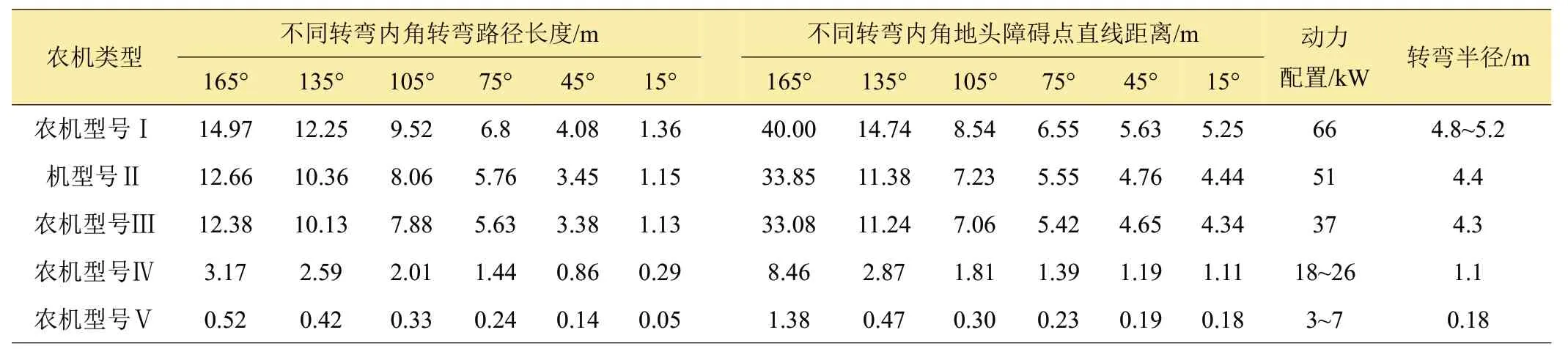
表3 不同类型翻耕地农机作业空间统计描述
3.2.2 作业移动点固定作业环节空间需求 烤烟农艺生产标准规定翻耕后田块施肥、起垄、覆膜后,烟草垄体栽培,直至采烤完成,田间农机作业移动点均由垄体分布决定。试验点烤烟垄体作业农艺标准为垄底60~70 cm,垄高30~35 cm,两垄体平行中心线间直线距离1.2~1.3 m。农机作业路径适用于方向平行路径作业方式,由“Π”型(或U型)、“Ω”型(梨形)和“T”型(鱼尾形)转弯方式计算田间作业空间,“Π”型(或U型)作业方式完成起垄,农机转弯半径≤0.33 m;“Ω”型(梨形)作业方式,地头具备>2 R 宽度掉头空间,R为农机转弯半径;“T”型(鱼尾形)作业方式,地头具备>R宽度掉头空间,R为农机转弯半径。由表2不同机型转弯半径分析,大中型农机实现作业,可以通过隔行替作业方式。表3可见,3种转弯方式,机型转弯半径越大,对地头路边转弯空间需求越大。以农机作业轨迹不破坏垄体为标准,对机耕路需求从试验机型工作空间需求分析,地头机耕路宽度范围0.6~2.0 m;对田块地头宽度空间需求,其中“Π”型(或U 型)对田块地头宽度要求不小于农机转弯半径的4 倍,即0.72~20.80 m,“Ω”型和“T”型对地块宽度要求较小,分别为农机转弯半径的2倍和1倍。同时满足机耕路宽度与地块宽度,是实现农机作业的基本空间要求(图5)。
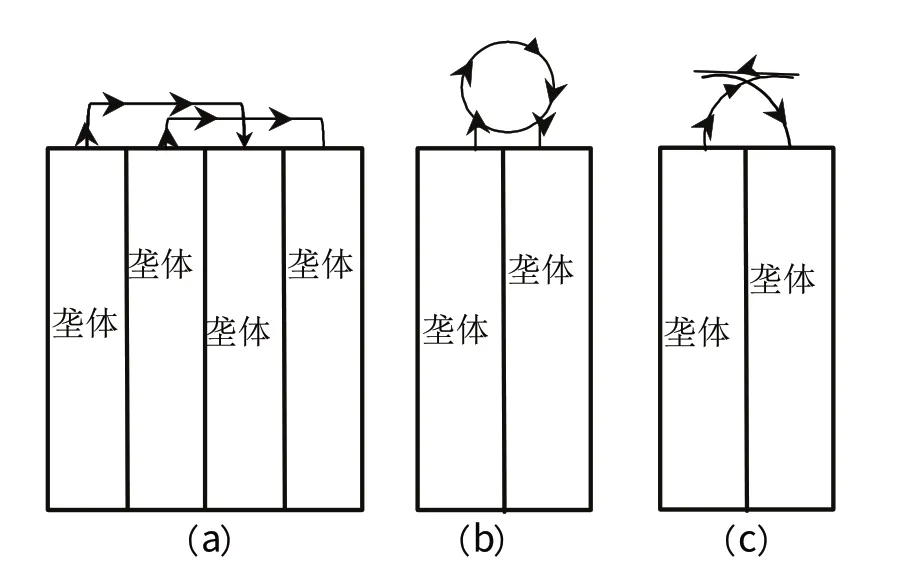
图5 烟草垄体作业农机转弯掉头示意图
3.3 不同地块条件下机型选配
3.3.1 翻耕、整地环节农机与地块条件匹配度分析 农机翻耕、整地包括烟秆拔除作业环节,地块空间需要同时满足直行和转弯2 个作业条件,包括地块作业面积和地头转弯空间以及机耕路入田作业基本条件的满足。
(1)田块面积与农机机型匹配度分析
机耕路条件是农机入田完成田间作业的前提。由表4可以看出,不同机型农机入田路径宽度需求范围,3~8 kW 微型农机需路径宽度>0.5 m,11~18 kW 小型农机需路径宽度>1 m,37~66 kW中型农机需路径宽度>1.8 m,66 kW以上大型农机需路径宽度>2.0 m。表2统计结果显示,能够满足不同机型入田机耕路的地块面积分布跨度较大,以不同农机机型与机耕路条件满足率为依据进行分类,65.4%地块具备大中型农机入田作业条件,77.8%地块具备小型农机入田作业条件,100%地块具备微型农机入田作业条件。由图6显示,地块最小宽度值是影响农机作业空间条件满足率的关键指标,较规则三角形地块和长宽比过大地块,对实现农机田间移动作业空间限制较大。从不同地块面积与机型作业空间需求匹配结果看,3~8 kW微型农机适用面积最广,11~18 kW小型农机较适用于667 m2以上矩形和梯形地块,37~66 kW 大中型农机较适用于2001 m2以上较为规则矩形和梯形地块。
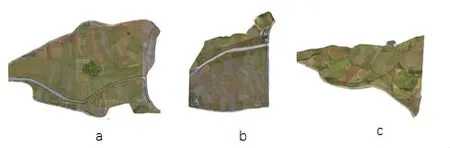
图6 烟田地块分布航拍图

表4 不同机型作业空间需求
(2)地块形状与农机机型匹配度分析
农机田间翻耕作业,包括烟田清残拔杆环节,对作业移动点无固定要求,可以沿地块轮廓螺旋向内作业,地块的面积和形状是否与农机机型匹配,是农机适用量选配关键。由表2可以看出,地块边角角度越小,转弯弧度越长,能够满足农机作业的有效空间越少,农机达不到的区域面积越大。不同机型地块角度与田间作业弧长关系方程见式(6)~(10)。

式中Y为农机作业转弯弧长,x为地边角度。
同一漏耕率、重耕率标准要求下,三角形和不规则梯形地块,与农机作业转弯路径的匹配度较低。
3.3.2 起垄、覆膜、移栽、采收 农机田间作业需要根据垄体分布进行定点移动,移动过程中,农机作业轨迹应避开完成作业区,作业轮或机身不能破坏烟垄、地膜和田间烟株等,农机田间作业完成后转弯掉头需有机耕路作为辅助,田块作业条件需满足机身作业空间需求,机耕路能够满足农机转弯调头空间需求。由表3中不同机型对应需求作业空间分布看,单机单行作业长度范围0.93~24.67 m,作业宽度范围5.2~20.8 m,“Π”型(或U型)属于间隔交替移动转弯掉头方式,地块宽度要求至少为作业宽度的4倍距离;“Ω”型(梨形)和“T”型(鱼尾形)属于相邻垄体之间移动转弯掉头方式,地块宽度需满足作业宽度的2倍距离和1倍距离,以上3种转弯模式下机型与地块作业宽度条件匹配度分析,“Π”型(或U 型),50~90 hp 动力牵引农机具单机田间静止空间需求范围513.6 m2;“Ω”型(梨形)空间需求范围180.1~253.5 m2;“T”型(鱼尾形)空间需求93.4~126.7 m2。因此,使用大中型农机作业机具,“Π”型(或U型)作业方式较适用于较大面积地块。
由图7 结果显示,“Π”型(或U 型)转弯方式,3~8 kW 农机适用于所有调查地块,11~18 kW 农机较适用于1334~2001 m2以上作业两端有机耕路地块,37~66 kW 农机空间满足程度较低,适用性较差。“Ω”型(梨形)和“T”型(鱼尾形)转弯方式对地块宽度值要求较小,地块作业两端机耕路与农机相匹配条件下,3~8 kW 农机适用各种不同面积和形状地块,11~18 kW农机形状较为规则的不同面积地块,37~66 kW大中型农机较适用于2668 m2以上形状较规则地块。由表5可知,以漏耕率和重复作业率为“0%”作为计算标准,调查区域66.7%地块条件能够完全满足微型农机作业需求,47.7%地块条件能够满足小型农机作业需求,9.5%地块条件能够完全满足大中型农机作业需求。
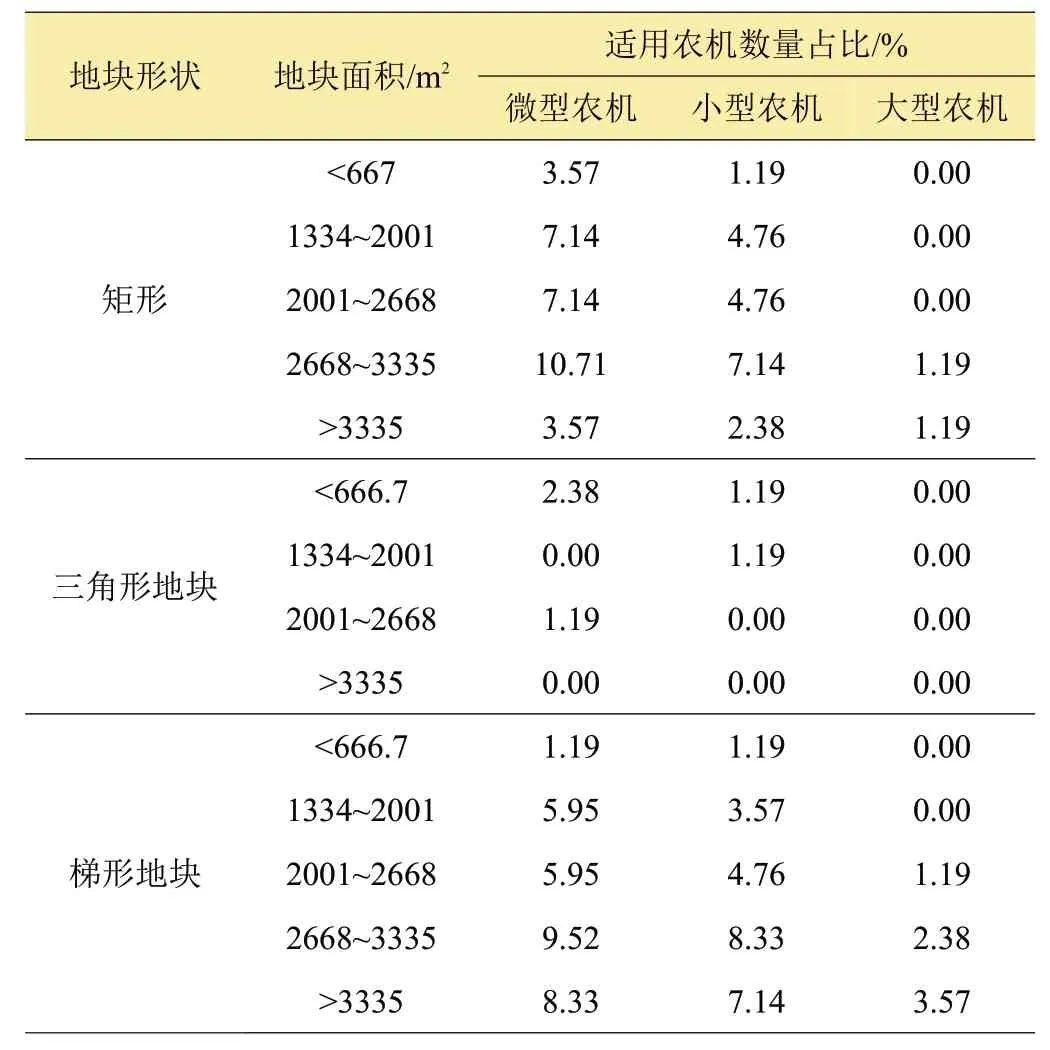
表5 不同机型农机数量占比
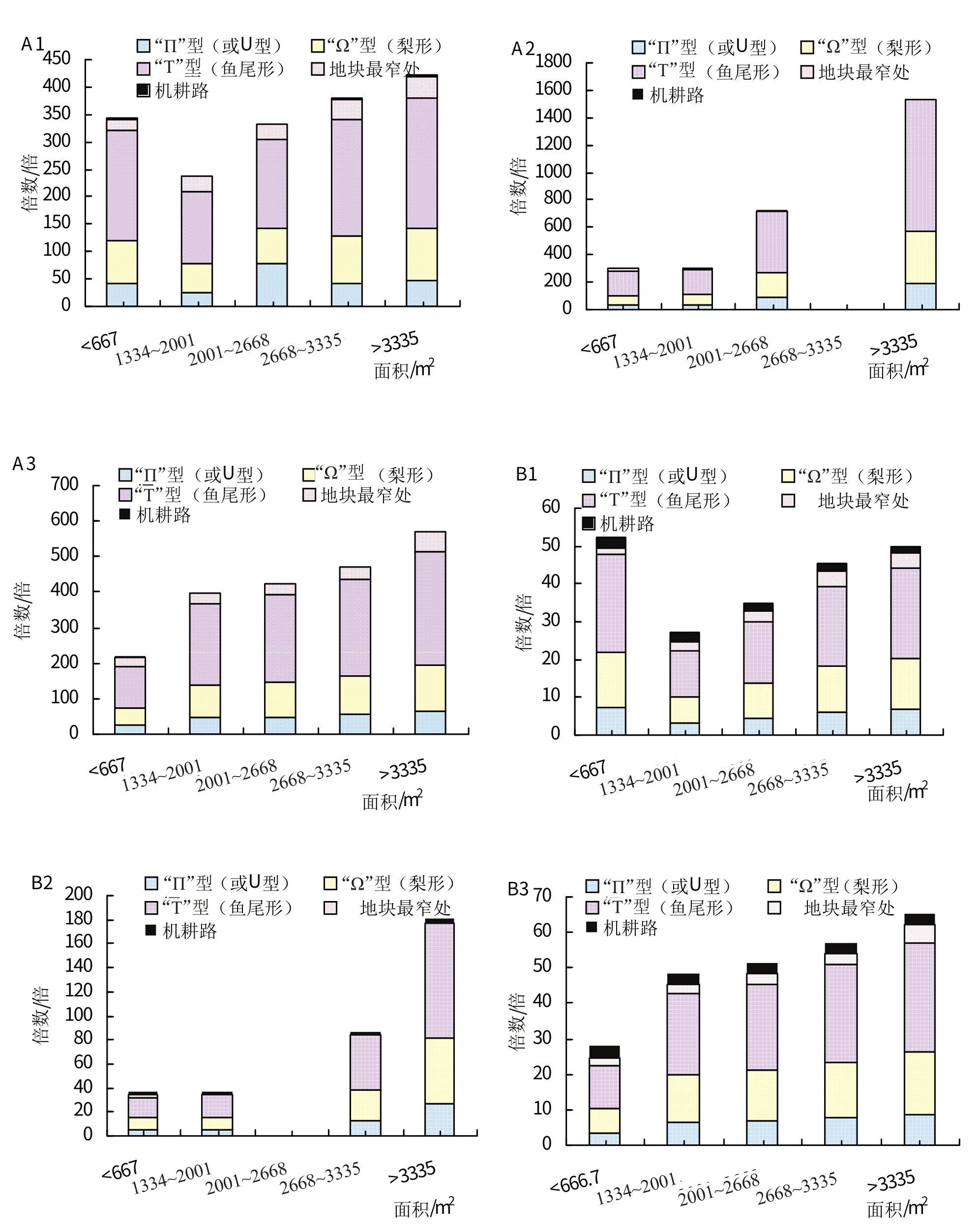

图7 满足入田作业机耕路条件地块特征值与机型作业空间满足条件分析
4 结论
(1)影响湖北烟区烟叶农业生产农机选型配置的首要因素,是烟田地块特征值与机型匹配度。其中,烟田机耕路条件直接影响农机机型选配,其次是地块形状和地块面积。
(2)湖北烟区翻耕地农机作业合理路径为沿地块轮廓向内螺旋作业方式。起垄、移栽、覆膜、采收环节,农机作业合理路径为平行作业方向“Π”型(或U 型)、“Ω”型(梨形)和“T”型(鱼尾形)方式。
(3)当前烟区翻耕地环节较适用农机机型,3~8 kW微型农机适用范围最广,田块条件基本都能满足作业条件需求。11~18 kW动力范围农机,适用于机耕路1~1.5 m、面积667~1334 m2以上地块。37 kW 以上动力范围农机,适用于机耕路1.5 m 宽度以上、面积2001 m2以上地块。起垄、移栽、覆膜、采收等环节以3~8 kW 微型农机适用性最高,其次是11~18 kW 小型作业农机,37 kW以上大中型农机目前尚不适用。
(4)调查区域烟田适用农机机型占比,分别为9.5%田块适用37~66 kW 农机;47.7%田块适用11~18 kW农机;66.7%田块适用3~8 kW农机。
5 讨论
中国农业机械最早研发多集中于大田农作物,以适用平原作业区的集约化和规模化生产的大中型农业机械类型为主,山地丘陵区域小型农机研发相对薄弱。近几年随着农业生产全程机械化的不断推进,山地丘陵区域农机需求量不断增大,小微型农机作业性能满足程度和区域适用性成为农机配置过程中主要考虑因素。烟草生产环节多,各环节农艺生产标准与农机作业参数融合度是农机配置的首要条件。湖北烟区为典型的山地丘陵区,地块条件较为复杂,对农机适用性条件要求较高,当前农机配置方法多借鉴大田作物和经验法,部分环节农机适用性差,造成因闲置带来的无效高投入成本。围绕“减工、降本、高效”的核心目标,本研究在湖北烟区与农机适用性相关地块特征值采集分析基础上,对区域内配置农机使用现状和不同环节农机配置状况进行分类,对当下生产中使用率较高、经试验验证的引进机型与地块作业条件进行匹配度分析,建立基于地块特征的农机选型配置方法。在对农机农艺融合核心示范区鹤峰县燕子镇荞云村实地试验验证中,通过田间实地测量、农机机型调研,实现科学合理地解决农机配置方法“本土化”,推进机械替代人工、降低劳动强度前提下,农机购置成本、管理存放空间和农机利用率的合理配置。
5.1 农机田间作业特点分析
烟草种植田间生产环节包括土壤翻耕、整地耙平、施肥起垄、覆膜移栽,以及烟叶收获后烟秆清除。农机动力配置和机身大小,对作业路径、田间作业条件需求差别较大,以满足作业质量需求为依据,农机田间移动轨迹划分为两大类:一类沿地块轮廓向内螺旋作业方式,翻耕、耕地、烟秆清除等作业环节属于此类。另一类是农机按方向平行移动轨迹作业,移动轨迹按固定路径行进,已完成作业区农机不可重复进入,起垄、覆膜、移栽、采收等作业环节属于此类,田间转弯、调头轨迹规划为“Π”型(或U 型)、“Ω”型(梨形)和“T”型(鱼尾形)3种方式,以避免机身对垄体、地膜、烟株造成损坏。
5.2 农机田间作业条件分析
同类型农机,动力配置越高,作业效率和作业质量表现越佳,但同时对作业空间需求越大。田间作业空间是满足农机作业的基本条件,其中,田间通达度即入田路径宽度和田间路径连通性,是农机机型适配性的首要条件。其次,地块面积和形状也决定农机机型选择。通过实地航拍、田间测量等方法,收集地块形状、面积、机耕路条件等信息,数据分析表明,烟区田块机耕路条件差别较大,面积大小不均,地块形状多样,部分田块规则性较差,造成农机选型配套影响因素较多。
5.3 农机作业参数分析
在对2010—2021年农机使用损毁率调查中,汇总机械性能稳定品牌,明确不同品牌和机型技术参数。分析当前烟区农机配置使用数据显示,适用于当前湖北烟区烟叶田间农业生产机型有三类,第一类是动力配置在37~66 kW动力牵引型作业农机,第二类是11~18 kW动力牵引型作业农机;第三类是3~8 kW自走式作业农机。
5.4 影响农机适用性关键指标分析
大中型农机体积较庞大,要求地块面积,尤其是地块的长度与宽度与其作业空间相匹配,小中型农机对地块面积要求相对降低。不同生产环节农机适用的转弯与调头方式,要求机耕路条件相匹配。通过分析当前使用的农机机型与作业条件匹配情况,入田作业及田间转弯调头的机耕路条件是评价适用农机机型选配地的首要因素,尤其是起垄、移栽、覆膜生产环节,为避免垄体受农机作业时机身破坏,调头转弯只能在机耕路上完成。其次是地块形状,地边夹角越小,耕整地农机体型越大,漏耕率越高。地块面积与机型匹配度主要影响指标是地块宽度,地块宽度是限制入田作业农机机型大小的关键指标。
