基于自适应参数双边滤波和小波变换的图像检索方法
2023-02-17邓冠男贾永鑫刘乙鑫
邓冠男 贾永鑫 刘乙鑫
(东北电力大学理学院 吉林 吉林 132012)
0 引 言
图像检索系统[1-2]是一种在图像库中通过检索图像标注的文本或者视觉特征,为用户提供图像检索服务的搜索系统。随着图像技术的发展,对图像检索方法的要求越来越高,基于内容的图像检索应运而生,逐渐取代了需要大量人工参与的基于文本的图像检索方法。
图像在进行检索之前,通过感兴趣区域提取[3-4]方法,提出用户关心的感兴趣区域部分,会极大地提高检索的准确率。图像内容的复杂度越高,感兴趣区域提取越困难,因此在感兴趣区域提取之前对图像进行增强处理[5-6],有目的地突出图像主体的特性,便于感兴趣区域的提取。
由于图像感兴趣区域整体像素值比较集中,灰度值变化缓慢,属于图像中的低频区域,而小波变换能够将图像信号中的大部分能量集中到低频分量上,突出低频信息。因此众多研究者都致力于小波变换在图像增强方面的研究。郝成成等[7]提出一种基于小波分解和Hu不变矩的图像检索算法,高效地提取图像的相应特征,但是去噪效果欠佳。田沛等[8]提出一种基于小波变换的图像去噪新方法,利用维纳滤波对小波系数进行处理,同时保持低频系数不变,从而实现图像去噪。周旋等[9]提出一种基于小波变换的图像增强新算法,采用不同的增强算法对不同层次的小波分解系数进行处理,增强效果相较传统方法有所改善,但效果不明显。蔡政等[10]提出一种基于小波系数关系的图像去噪方法,利用小波系数尺度间与尺度内的关系辨别边缘信息和噪声,取得不错的效果。
双边滤波是一种结合图像空间信息与内容信息的非线性滤波算法,可以解决小波变换在处理纹理信息丰富图像上的不足,在消除噪声、平滑图像的同时,又能较好地保护边缘信息。但是双边滤波中的参数是由人工设定,不适用于大型数据库。本文在此基础上加以改进,实现参数的自适应选取,提出一种自适应参数双边滤波与小波变换的图像检索方法,改进了传统小波变换去噪效果不理想的缺点,经图像增强后感兴趣区域提取的准确性明显提高,在图像检索中也有较强的实用性。本文算法结构如图1所示。
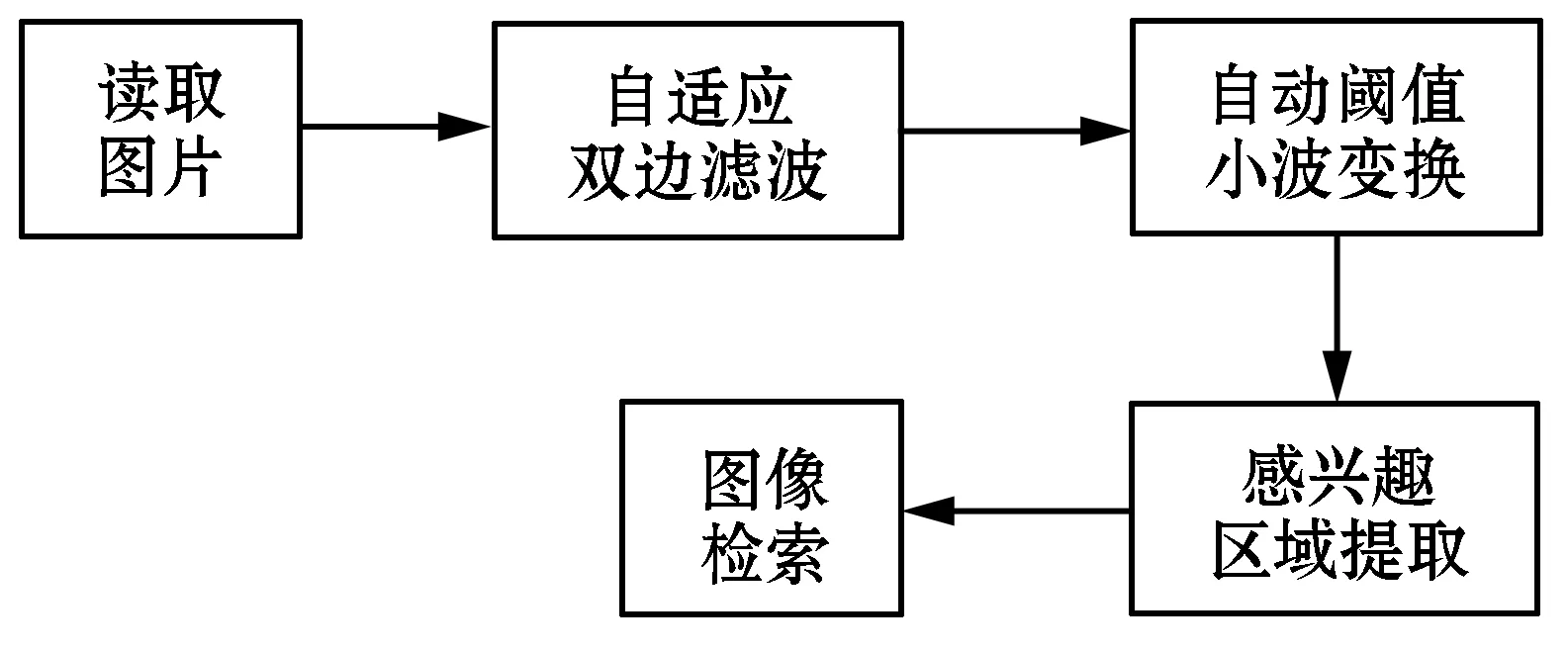
图1 算法结构图
1 自适应双边滤波与小波变换方法
1.1 自适应参数双边滤波
双边滤波是一种非线性的滤波方法,是一种结合空间临近度和像素值相似度的综合处理。跟高斯滤波不同,双边滤波多了一个高斯方差,对一定范围内不同距离的像素值赋予不同的高斯权重,用两种权重结合,去噪的同时能很好地保留图像边缘细节信息,具有简单、局部的特点。双边滤波公式如下:
(1)
式中:Iq是输入图;Wp,q是像素点p关于像素点q的总权重;wσd为空间权重,wσr为像素值权重;d(p(x,y),q(x,y))表示像素点之间的空间距离;d(f(p),f(q))表示像素点之间的灰度差值的绝对值;σd为空间标准差;σr为像素值标准差;I_n是输出图。
双边滤波的参数须要人为设置,为了减少人工参与,针对参数的选择,考虑图像自身的影响因素,本文提出一种自适应参数的双边滤波方法。
1) 参数选择:σd、w。σd是空间标准差,w对应滤波窗口边长的1/2。空间相似权重由某像素点的位置相距中心像素点位置的距离决定。滤波核大小为n×n,n=2w+1。形式如下:
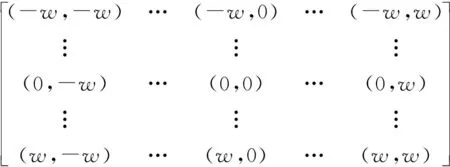
(0,0)位置是中心像素点,其余为相邻各个位置相对应的坐标点。wσd可简化为:
(2)
当d2=0时,wσd=1;当d2=2w2时,wσd取到最小值。因此w与σd须满足合适的条件,使得wσd的取值在范围[0,1]之间。做f=e-x的图像,x取整。如图2所示。
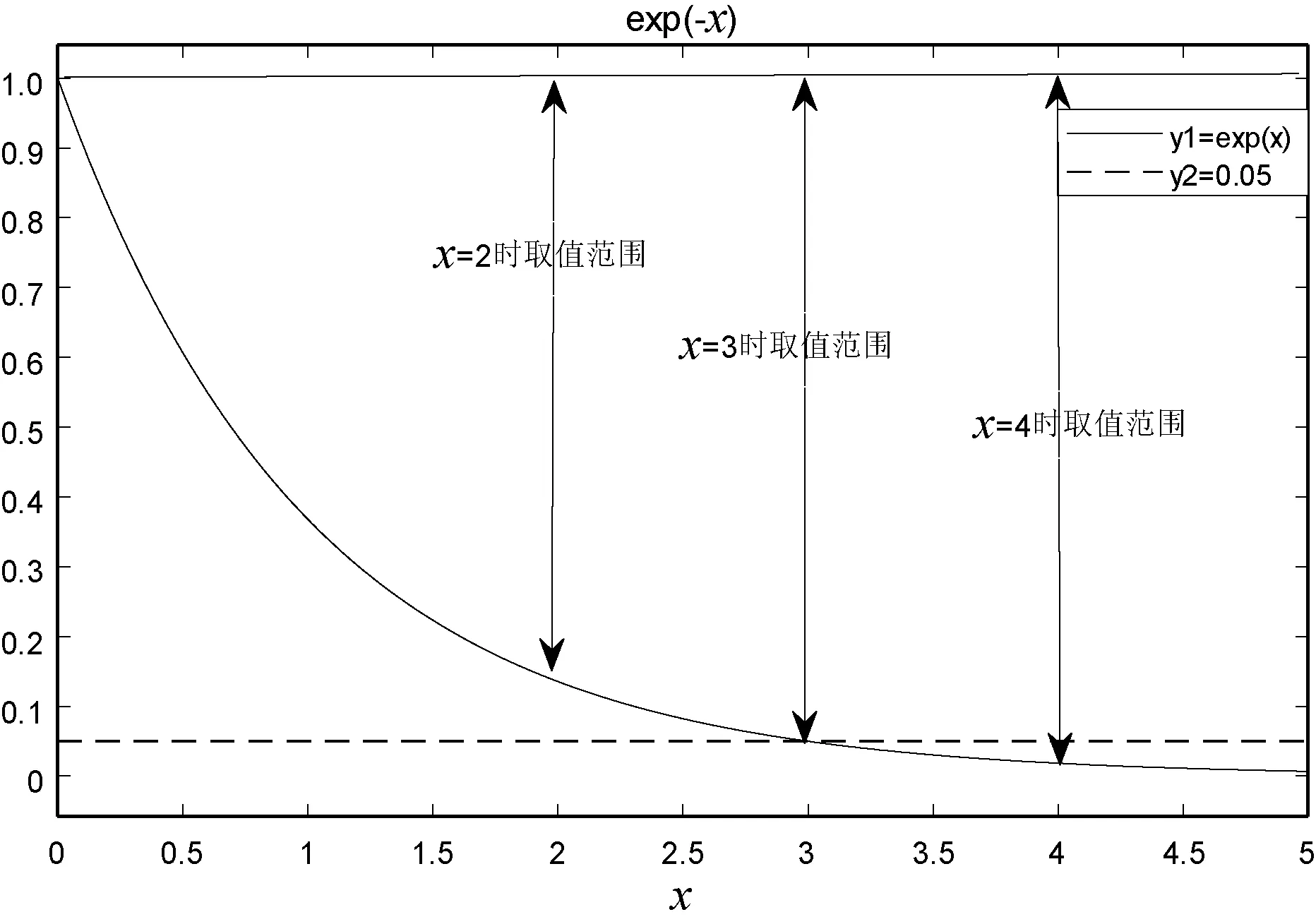
图2 wσd取值范围
可以看出,当x=3时,wσd最小值可取到0.05附近;当x>3时,wσd最小值变化不大,值域范围的扩张不明显;当x<3时,wσd最小值变化较大,值域范围缩小明显;所以x=3为最理想值。

下面分别赋予σd不同的值进行空间滤波,结果如图3所示。
σd=1σd=2σd=3σd=4σd=5
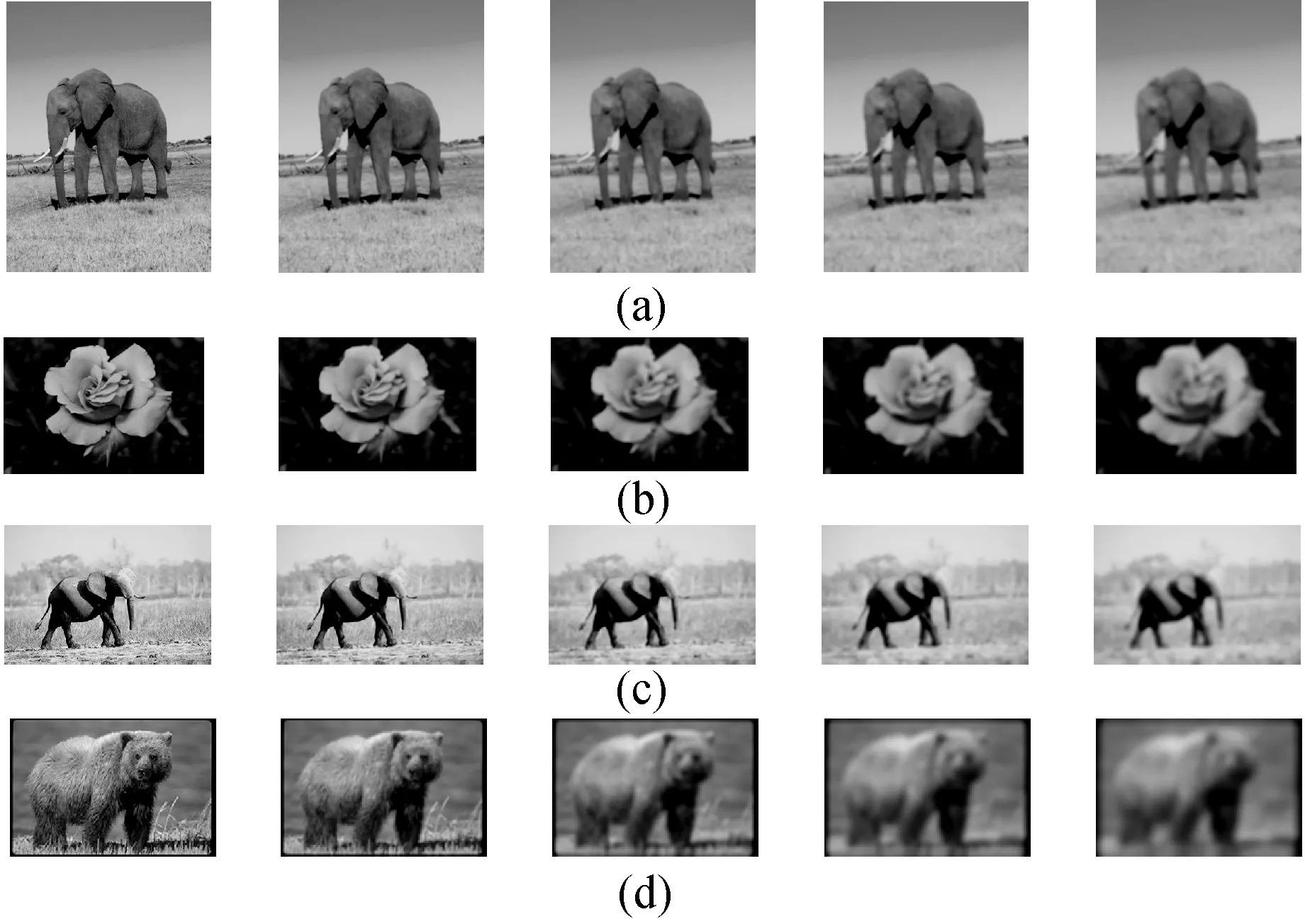
图3 空间滤波结果
为了比较不同σd时图像平滑质量,将图像均值(Mean)(式(3))与均方差(Mean Squared Error,MSE)(式(4))作为评判标准。Mean的值越大说明图像越接近白色,图像质量越差。MSE的值越小图像质量越高。
(3)
(4)
式中:xi,j表示一幅图像中位置为(i,j)的像素灰度值;M×N表示图像的大小。
比较结果如表1和表2所示。
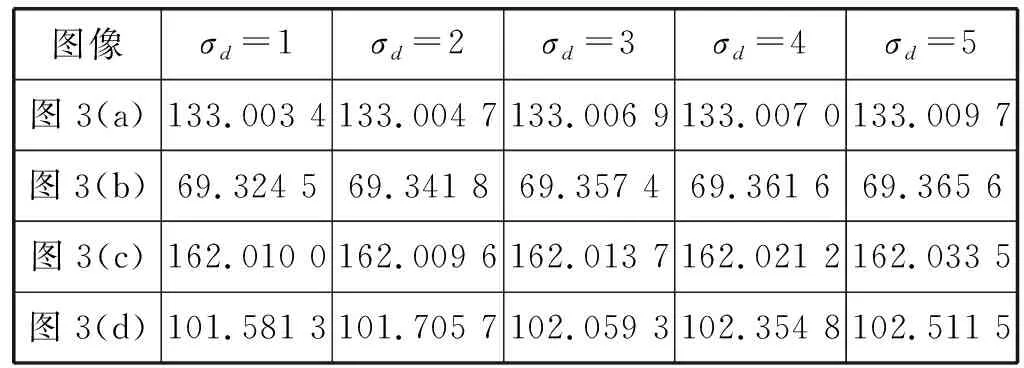
表1 不同σd均值对比
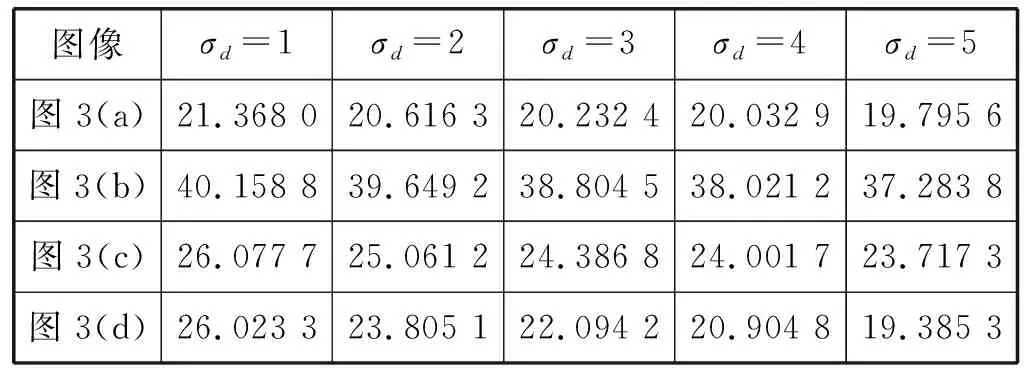
表2 不同σd均方差对比
由表可知,当σd取1和2的时候,Mean较小,但是相应的MSE的值较大,且图像的滤波效果不明显,图像质量不佳。
当σd取4和5的时候,MSE的值较小,但是相应的Mean的值较大,造成图像过模糊现象,图像质量不佳。
当σd=3时,Mean和MSE的值都适中,既实现了图像的平滑效果,又没有使图像过度模糊,滤波效果最好。
2) 参数选择:σr。σr为像素值标准差,wσr可简化为:
(5)
假设一幅图像I大小为M×N,其灰度均值为mean_I,则该图像的灰度值标准差σI为:
(6)
式中:xi,j表示在图像中(i,j)位置的灰度值。因此,用图像的全局灰度标准差σI代替σr作为双边滤波的像素值标准差进行计算。
分别用双边滤波和自适应双边滤波算法对图像进行滤波,结果如图4和图5所示。

图4 双边滤波图像 图5 自适应双边滤波图像
为了比较两种双边滤波的效果,将均方差与峰值信噪比 (Peak Signal to Noise Ratio,PSNR)(式(7))作为评判标准,对不同算法进行比较。PSNR的值越大图像越好。
PSNR=10×lg(2552/MSE)
(7)
比较结果如表3所示。
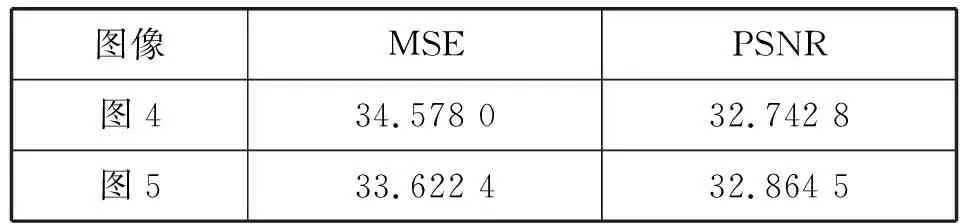
表3 比较结果
如图4-图5所示,经双边滤波之后的图像,实现了图像的去噪,但是图像较模糊。而基于自适应双边滤波的图像相较于双边滤波图像更加清晰,边缘更加明显,滤波效果明显好于前者。同时由表3可知,经自适应双边滤波的图像MSE的值相较双边滤波要小,PSNR的值也较高。因此图5的质量要高。
1.2 基于非线性阈值的小波变换
双边滤波对图像有平滑作用,同时保护边缘细节,使得低频信息更加集中,因而对自适应双边滤波后的图像进行小波变换可较为准确地提出图像的低频主体部分。
通过对小波系数进行变换,增强低频信息,去掉高频部分,再重构变换后的小波系数,即可得到去噪且突出低频信息的新图像。小波变换公式如下:
(8)
这里采用一种自动阈值的非线性函数对小波系数进行处理。
(9)
式中:WT为经小波变换后的小波系数,λ为小波系数阈值。当小波系数的绝对值小于给定阈值λ时,令其为零;大于阈值λ时,系数扩大为2倍。
阈值选取:低频系数跟高频系数的值相差较大,根据马赫带效应,两种系数的边界位置即系数对比最大的地方,因此选取此位置的高频系数值作为阈值。
图6和图7分别是图像经自适应双边滤波后再使用传统小波和自动阈值小波重构的图像。

图6 传统小波变换图像 图7 自动阈值小波重构图像
可以看出,传统小波变换使得图像模糊,主体部分与背景并没有明显的边界。而经过自动阈值的小波变换重构的图像,去掉了部分高频噪声和背景,使得主体明确,感兴趣区域更加突出。
2 感兴趣区域提取
小波重构图像较好地实现了图像去噪的效果,去掉了大部分的背景及噪声,根据此图像,采用感兴趣区域提取算法提出图像的主体,更大程度地去掉噪声部分,提高图像特征的提取的准确性。本文采用一种基于区域颜色梯度的图像感兴趣区域提取算法。算法介绍如下:
从颜色特征的角度看,图像的感兴趣区域与背景在颜色值上相差较大,主体部分整体像素集中,感兴趣区域有明显的轮廓边界,边界两侧的像素值差异明显,而且图像的四个边界部分包含的感兴趣区域较少,因此将图像分别按行和列作分块处理,可用像素均值表征分块后每块区域中行或列的像素分布,均值的变化率表示该区域的整体变化率,并将变化率最大的位置作为每个区域感兴趣区域的分割边界,取各区域的边界位置,取合适的值作为感兴趣区域的边界位置,最终实现感兴趣区域的提取。
对corel-5k库中的一些图像采取不同的方法进行感兴趣区域提取,与本文算法进行比较,结果如图8-图12所示。
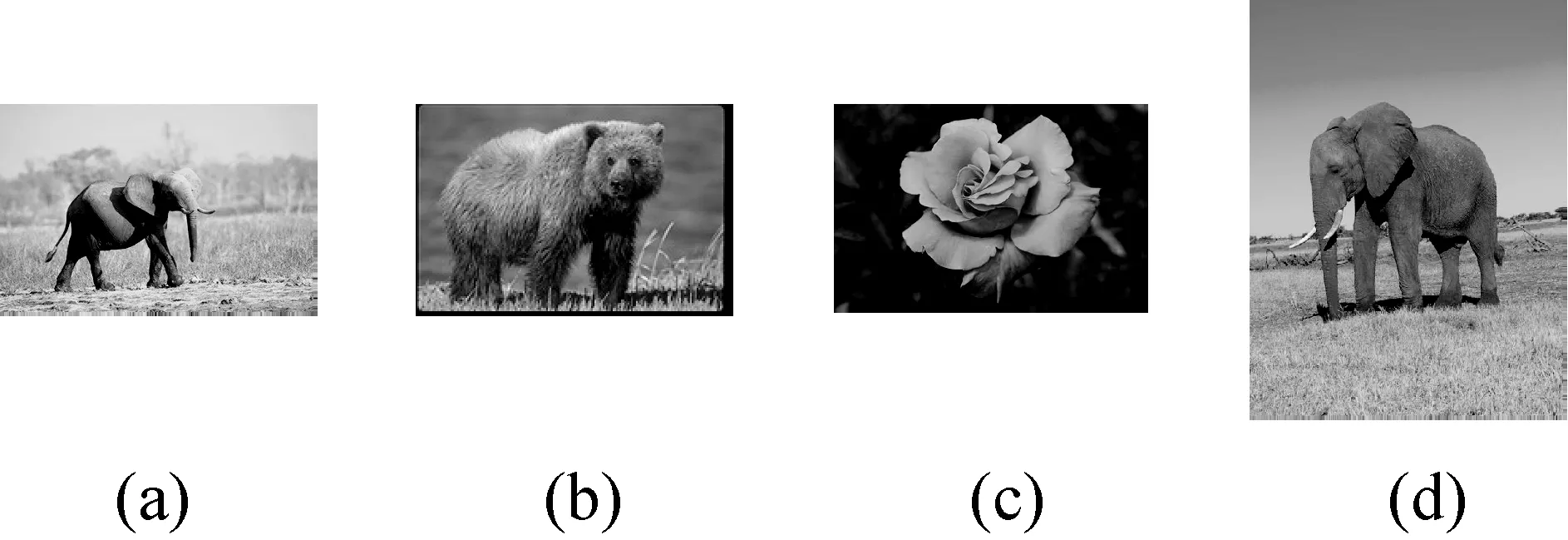
图8 原始灰度图像
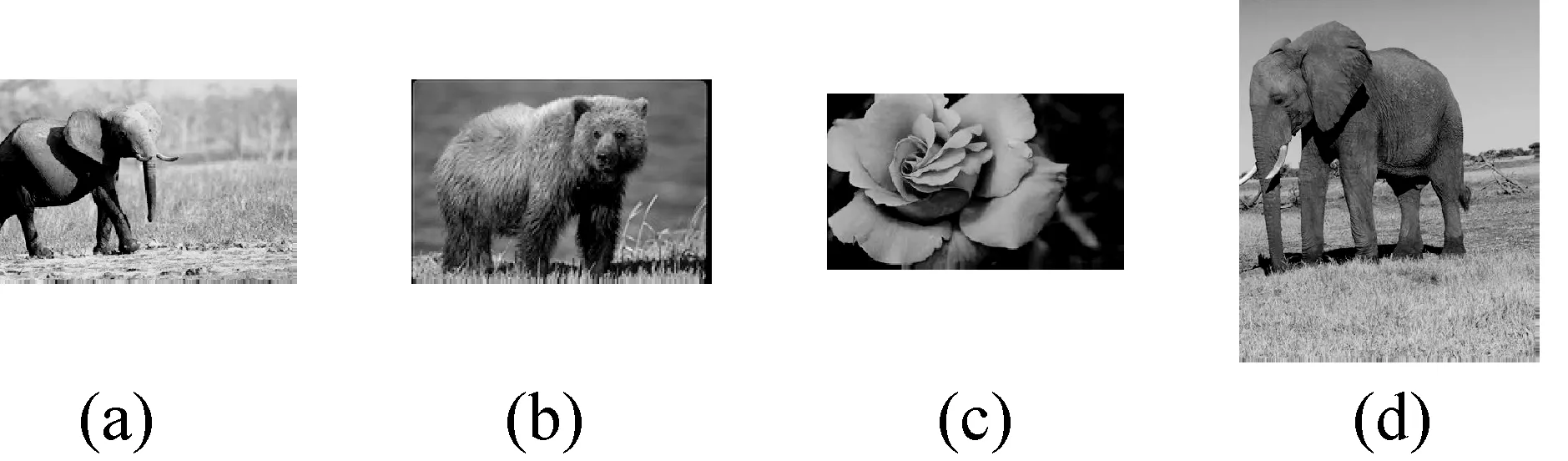
图9 方法1-感兴趣区域提取算法
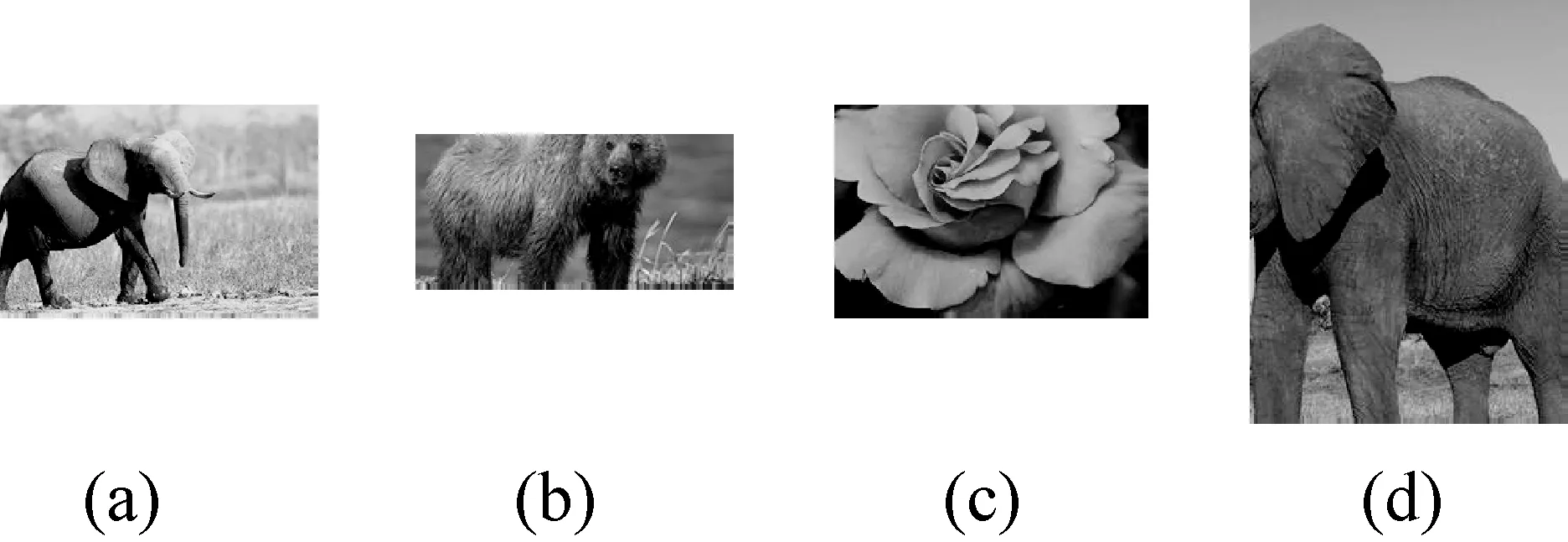
图10 方法2-传统小波变换+感兴趣区域提取算法
图11 方法3-双边滤波+自动阈值小波变换+感兴趣区域提取
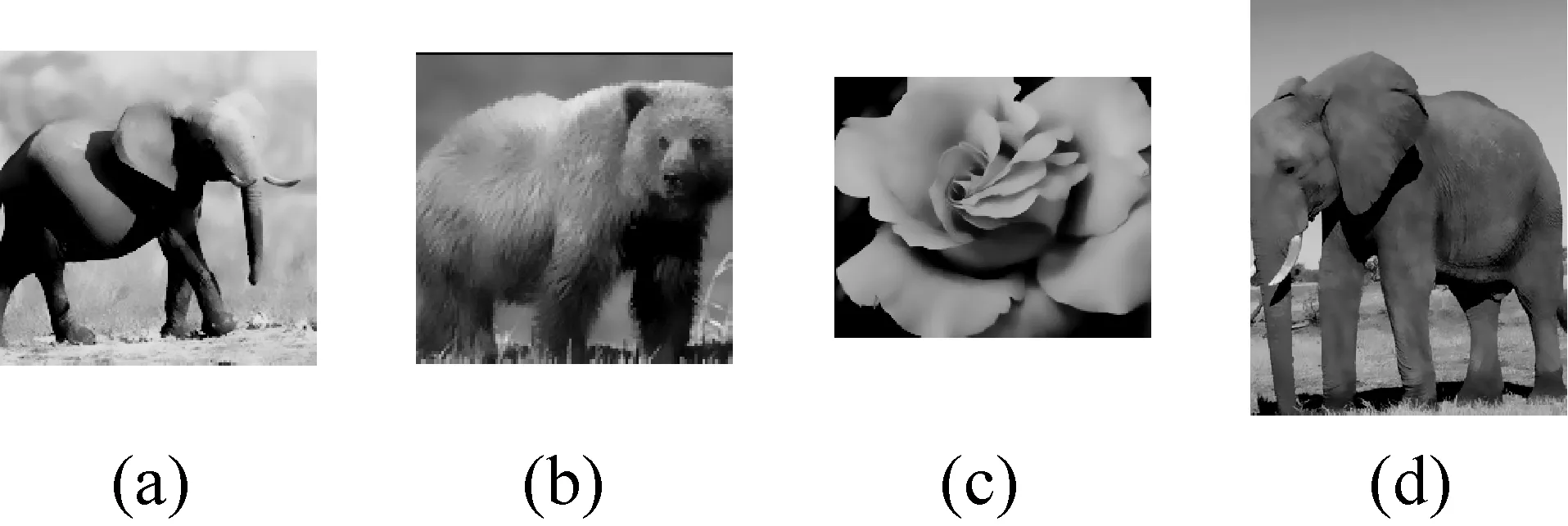
图12 方法4-本文算法
为了证明本文算法的有效性与优异性,将均方差峰值信噪比作为评判标准,对不同算法进行比较。MSE的值越小表示图像质量越好,PSNR的值越大图像越好。比较结果如表4、表5所示。
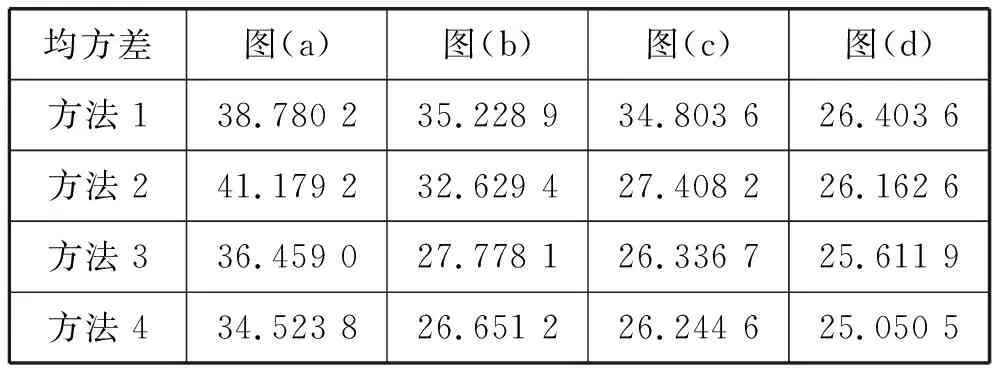
表4 不同算法均方差对比
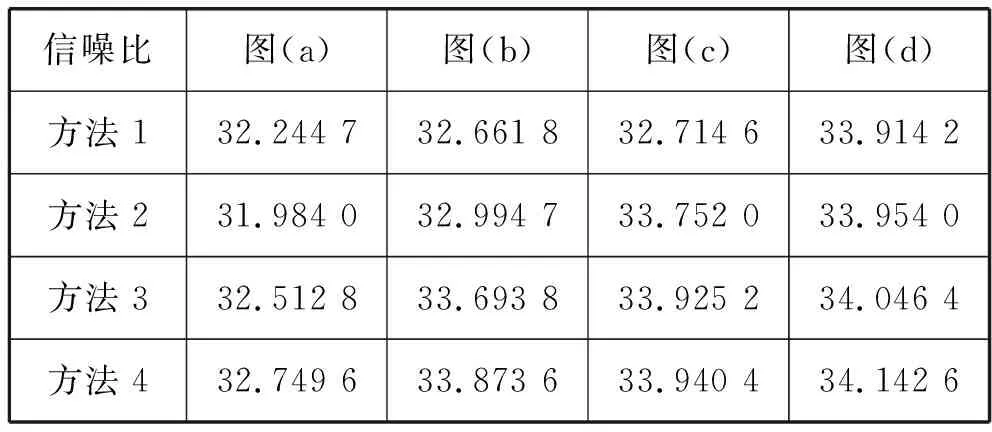
表5 不同算法峰值信噪比对比
由表4-表5结果可知:
方法1和方法2的主体边界不准确,感兴趣区域提取效果不佳。而且均方差值较大,信噪比也相对较小。
方法3采用双边滤波和自动阈值的小波变换算法,感兴趣区域提取结果较好,均方差和相较方法1和方法2有1%~5%的减少;峰值信噪比相较方法1和方法2约有1%的提升。但是双边滤波需由人工设置参数,而且算法所用时间较长,并不适用于大型数据集。
方法4在双边滤波的基础上加以改进,提出一种根据不同的图像自行设定参数的自适应双边滤波算法,结合基于自动阈值的小波变换算法。感兴趣区域提取准确,相比较方法3,均方差有所减小,峰值信噪比也略有增加,图像质量更好。证明本文算法的优异性。
3 仿真实验
基于内容的图像检索技术主要通过提取图像的颜色、纹理、形状等特征构成特征向量进行相似度对比。为了验证上述算法的实用性,分别提取图像的颜色矩、灰度共生矩阵和Hu不变矩三种特征构成特征向量。
颜色矩是一种简单有效的颜色特征表示方法;灰度共生矩阵是图像的纹理特征,不仅反映亮度的分布特性,也反映具有同样亮度或接近亮度的象素之间的位置分布,提取灰度共生矩阵三个特征——能量、熵、反差分矩;Hu矩是一种具有平移、旋转和尺度不变性的形状特征。提取这三个特征组成特征向量进行图像检索。
本文采用corel-5k图像库中的数据进行测试,通过计算待检索图像与图像库中图像的相应特征的欧氏距离判定相似程度,并比较与文献[3]和文献[5]中算法在不同返回结果的平均查准率。如图13-图15所示。
图13 待检索图像
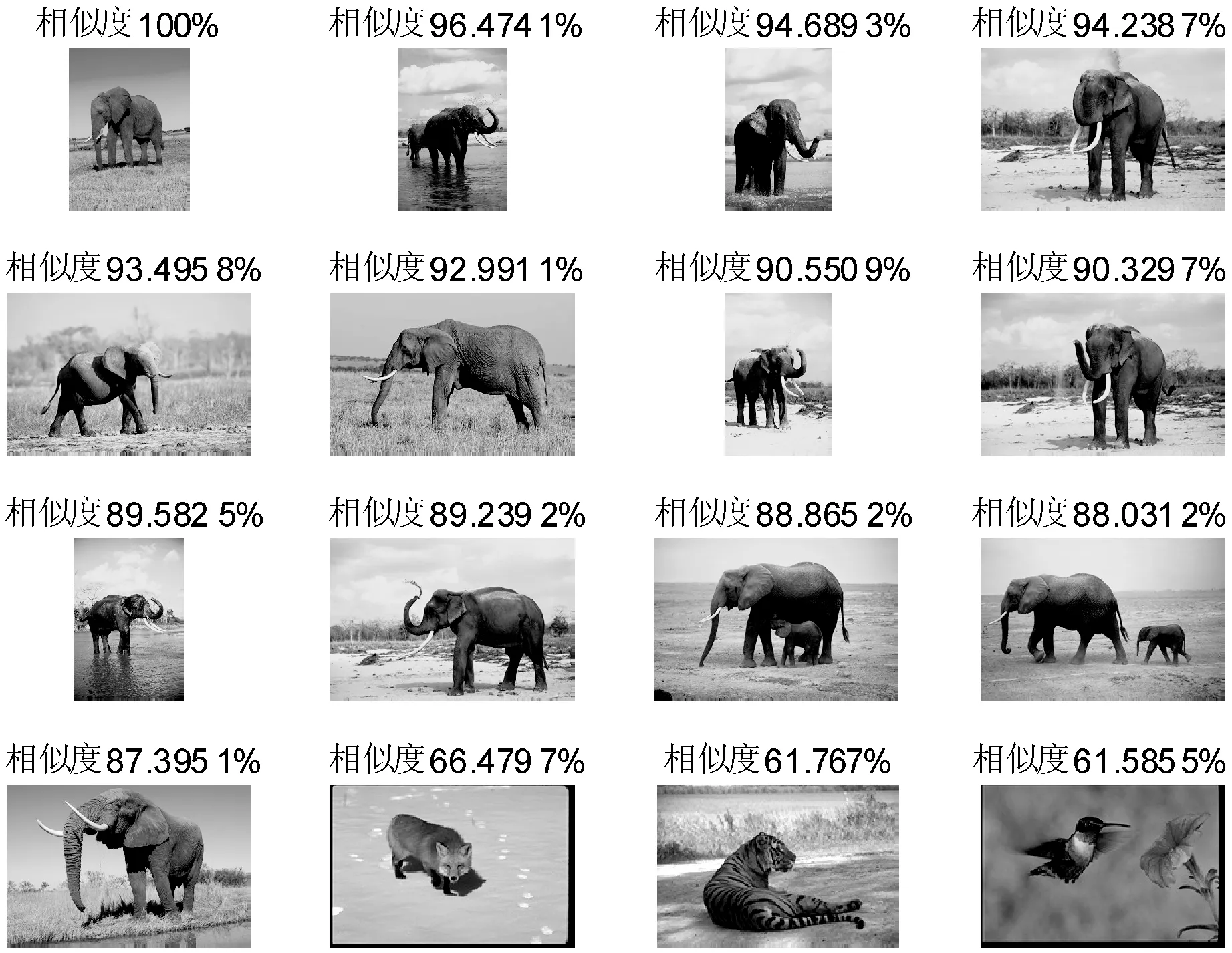
图14 检索结果

图15 查准率
图14为本文算法下的检索结果,可以看出,与待检索图像同一类别的图像按照相似度从大到小先被检索出来,相对而言,不同类别的图像因相似度太低而排在后面。图15是不同算法下不同检索结果个数时的检索准确率,可以看出,当输出结果为10幅图像时,三种方法均达到100%的准确率。当检索个数增加到20、50、100时,准确率都有所下降,但是本文算法的准确率相较于其他两种方法都要高,保持在90%左右,说明本文算法在图像检索中的实用性及优异性。
4 结 语
本文通过对双边滤波进行改进,提出自适应双边滤波算法,又对小波变换系数采用一种自动阈值的非线性方法进行修改,不仅提升了滤波效率,增强了滤波效果,而且使得重构后的小波图像主体信息突。实验说明本文算法在图像增强方面的有效性,使得感兴趣区域提取更为完整,图像的特征信息提取也更为准确,提高了检索的效率和准确度。
