电喷柴油机仿真模型在虚拟仿真系统中的应用研究
2023-02-17王贤涛张均东吴昌脉王博乔
王贤涛 张均东 吴昌脉 王博乔
(大连海事大学 辽宁 大连 116026)
0 引 言
轮机模拟器自问世以来便伴随着计算机软件技术的开发与升级而不断更新换代,经过半个世纪的发展,现已成为国内外航海事业不可或缺的基石。建模仿真技术的研究对轮机模拟器有着重要支撑作用,鉴于Simulink优异的可视化建模仿真技术,其在轮机模拟器中有着广泛的应用。柴油机作为船舶设备的核心,准确、有效的柴油机仿真模型是轮机模拟器实用性、普及性的基础。近十年来,新型的电控共轨柴油机因其燃烧控制的灵活性、经济性、高控制精度、运行性能好、采用了计算机的智能控制等优点[1],得到了广泛运用。文献[2-3]对RT-flex机型共轨系统进行了仿真研究;在气缸燃烧方面,文献[4-5]进行了基于容积法思想的建模研究。但就应用于模拟器而言还缺少二者联合仿真的整体模型,本文针对这一问题对整体仿真模型进行了深入研究。
随着软件技术的不断开发与升级,轮机模拟器不仅在二维用户界面更加友好,协同训练、智能评估等功能也更具智能化。同时,近年来随着虚拟现实技术的应用与升级,以其高逼真度、交互更具智能化等特点[6],极大地提高了人们的沉浸感与情景意识。文献[7-8]结合虚拟现实技术论证了虚拟仿真系统在教学、海事培训及考核领域具有较高的研究价值和应用前景;文献[9]对虚拟机舱布局提出了三种设计方案;文献[10]对二维软件与三维虚拟实验室之间的数据传输协议进行了研究,致力于减少时延,满足实时交互需求。
本文在搭建6RT-Flex58T-D电喷柴油机仿真模型的基础上,介绍了虚拟仿真系统二维端与三维端的设计原理,基于Visual Studio良好的集成开发环境,使用C#语言编写脚本,利用3DMax对三维实验室进行几何建模,在Unity3D引擎下进行设计,基于UDP协议开发柴油机的虚拟仿真系统,验证了模型在虚拟仿真系统中控制的准确性。
1 模型组成与分析
本文基于容积法建模思想,将以气缸作为热力系统核心的气缸燃烧模型联合电喷柴油机独特的共轨系统,进行整体建模。将气缸燃烧模型所得的柴油机实时转速作为共轨系统的模型输入,通过共轨系统相关状态及运动方程得到燃油循环喷油量、喷油正时、排气正时等,并反馈给气缸燃烧模型,构成整体的模型框架,如图1所示。其中,气缸燃烧部分联合了进、排气系统,空冷器,废气涡轮增压器等主要组成部分,是一个包含物理、化学、流体、传热、传质等的综合过程,需要对工质成分、气体常数、比热容、绝热指数、内能、比焓等紧随燃烧过程而发生变化的工质特性参数,基于能量、质量守恒以及工作状态方程等建模的理论基础,进行数学模型的搭建,模拟内燃机工作过程[11]。

图1 模型组成及整体框架
共轨系统(Common Rail)仿真是以液体流动数学方程为建模基础进行研究的。燃油共轨模型主要由高压油泵、中间储油器、燃油共轨管、ICU控制单元、喷油器组成,本文共轨中的油压维持在50~70 MPa。供油单元由高效的柱塞式增压泵组成,通过柴油机曲轴输出端的齿轮驱动。
高压油泵柱塞腔的连续方程:
(1)
式中:Vpc、Apc分别为柱塞腔容积和截面积;ρ为燃油密度;hpc为柱塞的升程;Epc为柱塞腔的燃油弹性模量;μpi为燃油泵的进口流量系数;Qia_in为进入中间储油器的流量;α1、α2为阶跃函数;下标pc代表柱塞腔,下标pi代表燃油泵进口。
伺服油共轨系统主要由伺服油泵、收集器、伺服油共轨管、VCU控制单元、排气阀组成。伺服油泵与柴油机输出端齿轮连接,可将液压油加压到20 MPa,然后供给到伺服油共轨管中,最终达到启闭液压排气阀的目的。
受到共轨管中油量变化的影响,共轨管中伺服油的压力也随之变化,主要是由伺服油泵的供油量、排气阀驱动器动作、气缸注油器动作、阀件泄油等因素共同决定的,共轨管的状态方程如下:
(2)
式中:ρc2为伺服油弹性模量;Qcr_in、Qcr_out为流入、流出共轨管流量;μc_to_s为减压阀流量系数;Pccr为控制油轨压;τ1、τ2为阶跃函数;μs_to_c为单向阀流量系数;下标cr表示伺服油共轨、rv表示减压阀、cv表示单向阀。
本文为了提升模型的适用性与研究性,将电喷柴油机的高压共轨机构与气缸燃烧模型进行联合建模,采用了三韦博(Vibe)半经验公式,将三条韦博曲线按一定规则叠加起来,模拟内燃机燃烧规律,使结果更接近于实际情况。将燃油共轨系统输出的循环喷油量作为燃烧份数,根据曲轴转角区分、界定燃烧过程。
其中扩散燃烧放热率:
(3)
式中:md和φB为燃烧品质系数和持续期;φ为曲轴转角;φZd为扩散燃烧角度。
对缸内热力过程的数学描述还包括气缸周壁的传热、进排气流量的计算、气缸实时容积的计算等,另外还需分别对进、排气系统,空冷器进行热力过程描述,得到温度随转角的变化关系式,还需建立涡轮机与压气机的数学模型,包括涡轮的质量流量与输出功、压气机质量流量与压缩功等。对共轨系统,还需对高压油泵、储油器、共轨管等主要部件建立相关的连续性方程,限于篇幅,本文不再详细介绍。
2 仿真模型搭建与验证
2.1 电喷柴油机仿真模型搭建
柴油机气缸燃烧部分仿真模型如图2所示,其相关模块组成与数学模型描述一致。曲轴模块,通过对气缸做功、负载、扭矩、发火状态,组成曲轴转速的实时计算模块;空冷器模块,主要处理同压气机与进气总管的压力与质量流量的关系;进、排气系统模块,处理温度和压力随曲轴转速的实时变化关系;涡轮增压器模块,连接进、排气系统,处理流量、温度与做功的问题;气缸作为热力系统的核心,根据曲轴转角,结合进、排气系统的质量、温度关系,需要对周壁散热,燃油燃烧,气缸内质量、温度、压力,压缩始点压力,指示功率,过量空气系数等做出计算。

图2 柴油机气缸燃烧部分仿真模型
在共轨系统中存在各部件初始油压,油泵、针阀位置等诸多初始设定条件。各缸喷油以及排气阀动作,按1-5-3-4-2-6的发火顺序进行。图3给出了伺服油共轨管内部模型,其组成与式(2)数学模型描述一致。
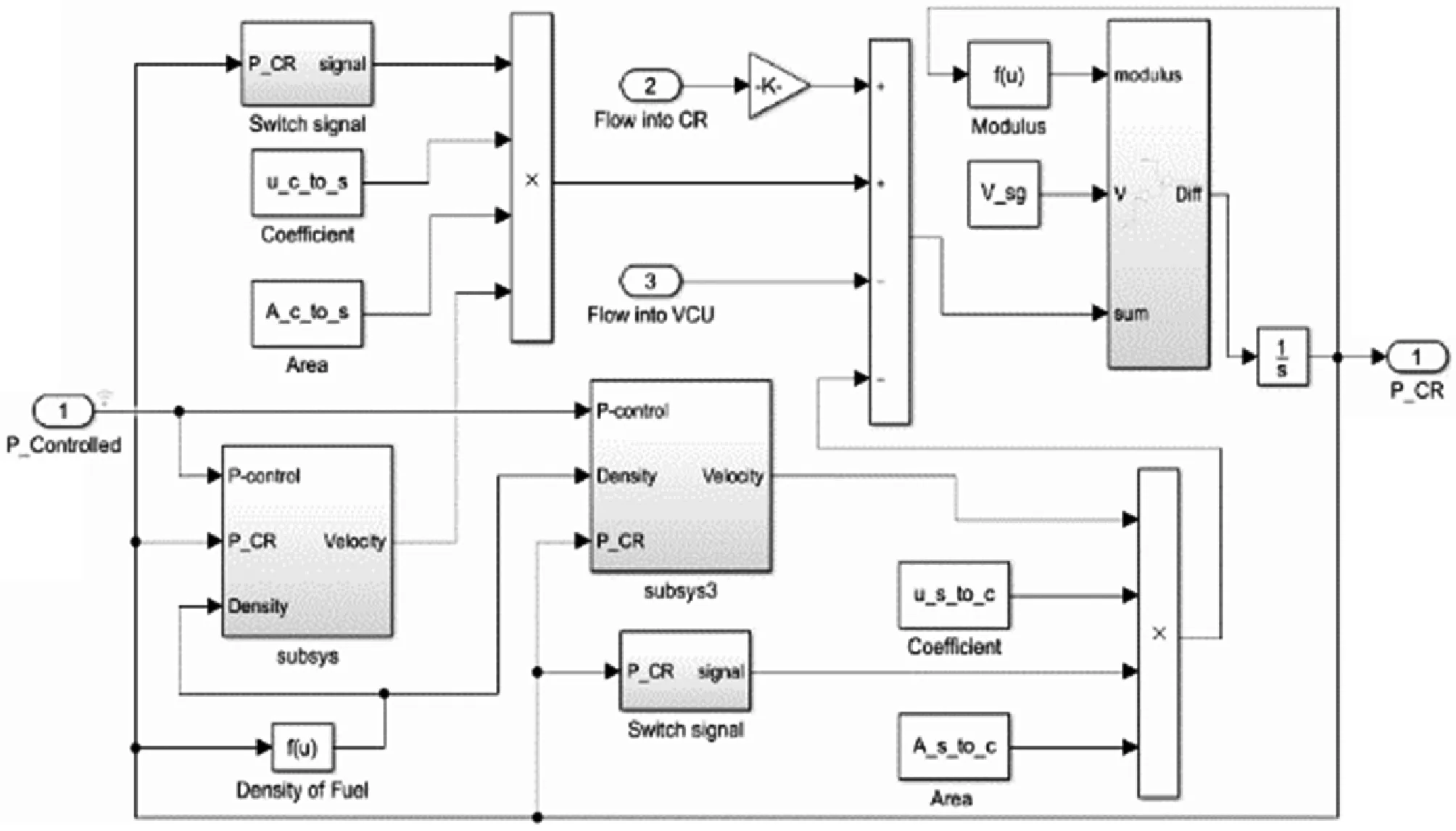
图3 伺服油共轨仿真模型
2.2 仿真模型验证
在联合共轨系统模型与气缸燃烧部分的模型时,将由气缸部分仿真计算出的柴油机实时转速作为共轨系统的输入,并与油泵凸轮转速进行转速比处理,对整体模型转角进行统一。在共轨部分的仿真模型中,对喷油脉宽以及排气脉宽进行插值运算处理,模拟在特定工况下柴油机的喷油、排气及燃烧过程。图4-图6分别给出了在100%负荷工况下的示功图、气缸压力随容积变化曲线、燃油共轨压力波动曲线。

图4 100%负荷下气缸压力示功图

图5 100%负荷下气缸压力随容积变化曲线

图6 100%负荷下燃油共轨压力波动曲线
由轨压波动曲线可知,随曲轴转动进入喷油期时,初期共轨压力会出现一个小幅度波动,表明喷油开始,随着喷油过程,轨压迅速下降至最低点。喷油结束,在高压油泵和储油器的作用下迅速将燃油轨压恢复至设定值。
燃油共轨系统高压油泵柱塞升程仿真曲线如图7所示,可以看出高压油泵升程曲线可随柴油机转速比较柔和且稳定地输出,A、B两列油泵呈“V”型布置,其三作用凸轮效率更高,符合实际工作情况。

图7 高压燃油泵柱塞升程曲线
根据模型计算得到的各工况仿真数据与柴油机台架实验理论参数的对比如表1所示,可以看出误差基本保持在5%以内,模型精度满足要求可应用于轮机模拟器虚拟仿真系统。

表1 各典型工况下的仿真数据对比
在柴油机整体模型中,如压气机图谱、轨压与工况匹配关系等相关数据处理问题上,依靠实验数据作为特征点值,采用了分段低次插值方法获取连续的一维或二维图谱值。
3 虚拟仿真系统的构成
以仿真模型为核心构建轮机模拟器虚拟仿真系统,分为二维模拟软件和三维虚拟实验室,采用Socket的方式建立数据通信管道,主要由客户端、服务端、管理端和仿真模型端组成,系统框架如图8所示。

图8 虚拟仿真系统软件结构
客户端要求用户界面功能丰富、美观和实用,能自适应不同的分辨率大小的窗口。
服务端作为平台核心,提供统一平台的基础支撑数据,如在线用户、当前状态等实时数据,并可实时保存当前操作数据和加载历史保存操作数据,提供场景的初始状态,同步各客户端的状态数据,转发客户端之间的通信数据等。
管理端完成对所在计算机上的模型、二维和三维的管理。
仿真模型端基于船舶机舱人-机-环境系统工程理论,建立了数学逻辑与几何模型库。
4 虚拟仿真系统开发
4.1 二维模拟软件结构
仿真程序采用简单的三层应用程序结构,主要表现为用户界面层、数学逻辑层(模型层)、数据层,如图8二维端所示。用户界面层负责响应用户操作、监视模型运行状态,包括两个主机控制界面(主机本地控制与遥控界面)以及两个共轨高压油控制界面。逻辑模型层负责模型的数值与逻辑运算,包括一个主机模型,两个共轨模型。数据层用于存储模型运行数据和状态数据。
在Visual Studio良好的集成开发环境下,首先在.NET Framework平台上,采用WPF程序结构开发程序界面,使用C#编程语言实现仿真程序的开发,充分发挥.NET Framework的性能。在实际开发中,一些WPF提供的类无法直接满足要求,需要用自定义类继承系统提供的类,以添加自己需要的功能,通过XAML实现UI设计和逻辑代码编写的真正分离。在编译时,XAML文件中的代码也会被编译成二进制文件嵌入到程序集中。图9为根据仿真模型制作的二维模拟器显示界面。
图9 主机部分二维模拟软件界面
图10为主机运行状态监控界面,也是软件实现的验证界面,该界面以曲线图的形式对主机的各个性能参数进行监视。从运行结果可知,仿真模型在二维端运行良好,与仿真模型验证阶段曲线保持一致。

图10 主机运行状态监控界面
4.2 三维虚拟实验室的搭建
轮机虚拟实验室是海事教育工作中的重要组成部分,三维虚拟机舱以高拟真度再现机舱环境,为船员培训机构节省大量成本,极大地提高了航海类学员的实船感,增强了学员的情景意识与感性认识[12]。
由于Unity的开发脚本基于MONO,因此同样可以使用C#语言进行编写以满足与模型端的良好衔接。选取3DMax进行几何建模,联合Unity 3D引擎开发三维实训机舱,可进行自动漫游和通过鼠标键盘等输入接口在场景中手动漫游,手动漫游过程中系统可进行实时碰撞检测。在三维视景中有实船机舱的真实光照、材质、阴影、碰撞等,具有如材质贴图叠加、透明、漫反射、环境反射等特效,具备良好的立体显示效果。利用多种贴图优化技术来实现模型细节部分的真实显示效果,使最终的船舶虚拟实验室在保证具有足够的真实感的基础上,同时具有令人满意的加载速度、画面平均帧率、内存占有率、交互延迟时间[10]。
虚拟三维视景仿真实验室的搭建是一个庞大的工程,其制作步骤如图11所示。

图11 三维虚拟实验室搭建流程
资料基础:依靠现场测量、拍照取材、产品资料等对母型船进行精确的整体结构建模。
模型资源库的建立:针对具体设备,如阀门、管系、报警灯柱、单元热加热器等,建立模型库,对模型进行标准化设计与管理。
系统布置:按照真实机舱各管道、设备等原理图,严格复原实船系统布置[13]。
漫游设计:主要包含自动漫游与手动漫游,需要对较集中的交互进行分组处理以及增加交互视角、路径规划以及碰撞检测等。
人机交互:进行交互实体行为建模与选择,通过三维拾取实现对设备的操作和管理,丰富交互内容(如阀门、开关、仪表、触摸屏等)实现用户友好的交互功能。
场景优化方案:在充分现实和沉浸的基础上,采取使虚拟场景图形平滑和加载速度满意的方法,对建立的三维模型进行优化处理。主要依靠的优化技术有:模型端的优化技术(功能节点优化、纹理映射优化、实例化建模优化)、编程优化技术(LOD优化技术)等。
辅助功能的设计与开发:机舱设备的导航、系统状态的保存和加载功能、设备文件管理、故障设置、交互实体信息的实时显示、虚拟小地图的展示等,为了适应培训的需求,还可开发满足使用的智能评估系统。
资源库以及主机部分最终渲染效果如图12所示。

图12 主机部分三维虚拟实验室渲染效果
5 虚拟仿真系统的实现
由于虚拟仿真系统的数学与逻辑模型通常集成在二维仿真软件中,目前主流的轮机模拟器,其配套的机舱虚拟三维视景仿真实验室一般需与二维仿真软件通过网络连接方可实现,因此如何实现二、三维端的实时通信就成为了仿真系统实现的关键。
二、三维端以用户的输入作为驱动程序的接口,在获取用户的输入操作后,通过模型端的逻辑运算响应并改变程序中模型的状态,模型状态改变后,根据底层控制及渲染机制,进一步对二、三维端视图层进行刷新,反馈用户。虚拟仿真系统状态改变基于事件流,采用事件发布-订阅的软件框架设计,其逻辑处理流程为事件产生→事件分发→事件处理→状态更新[10]。
为满足人机交互的及时性,采用组播的方式在整个系统中实现数据传输。数学和逻辑模型端作为服务端,将实时计算的仿真数据发送给所有客户端,包括同一组播中的二维端、三维端,进行更新交互实体的状态。同时将来自每个客户端的操作信息发送回数学和逻辑模型,以人为地插值进行数学和逻辑模型的计算,使其从新状态运行[6]。
二维模拟软件与三维虚拟场景之间的传输层协议采用的是用户数据报协议(UDP协议),UDP协议提供的是一种无连接的数据传输服务,其在传输数据时无须建立和释放连接,省去了TCP协议中的3步“握手”过程,从而减少了数据传输的开销和时延,提高了数据传输的实时性,满足实时交互需求[10]。
UDP通信协议的实现由客户端和服务端组成,二维软件与三维虚拟实验室间的通信框架如图13所示。
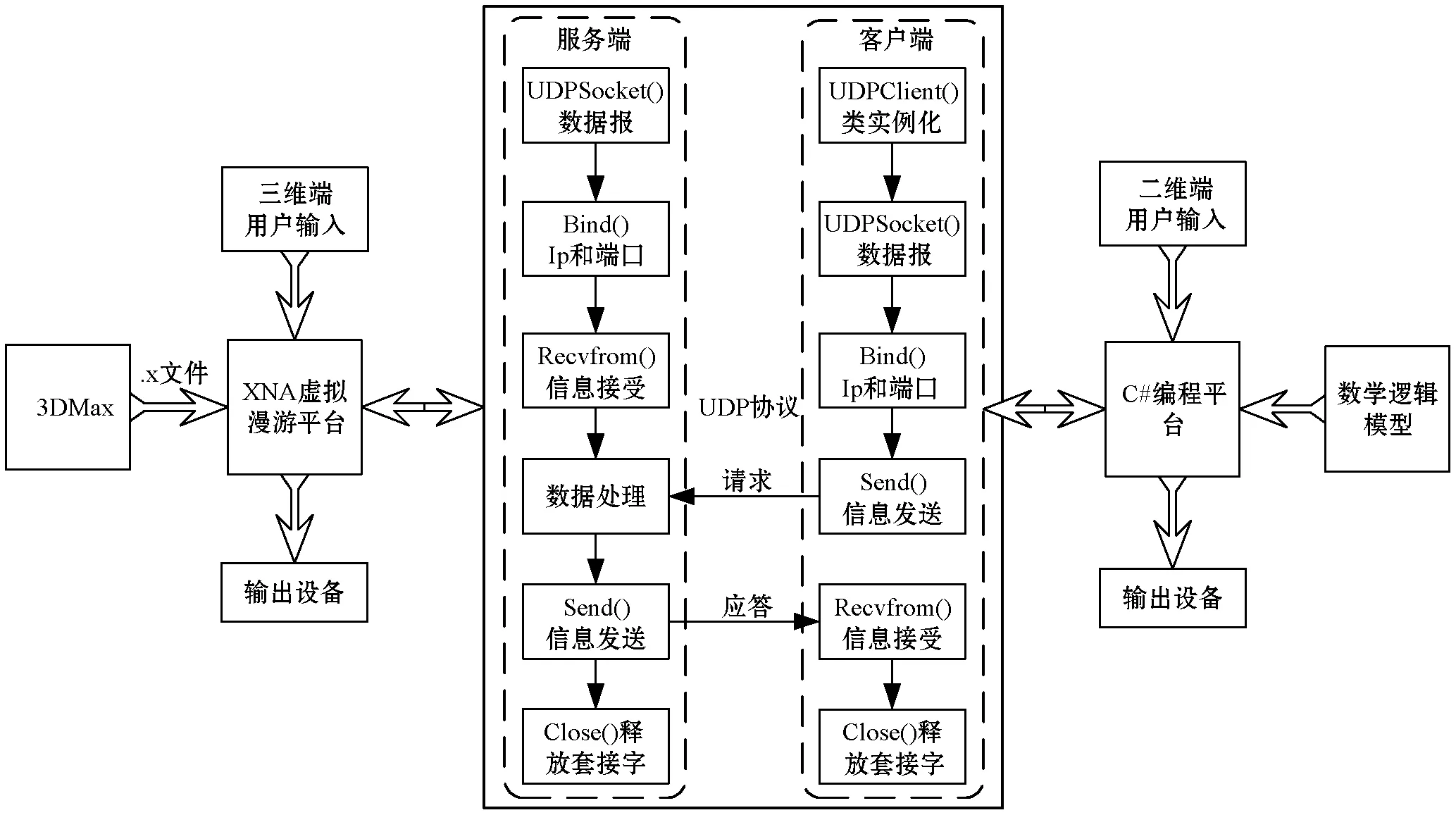
图13 二维端与三维端实时通信框架
通过协议,客户端对数据报进行打包封装,通过调用Bind()方法,配置远程主机IP及端口号,调用Send()方法发送数据报,等待服务器端响应;服务器端对客户端数据报进行绑定,并调用Recvfrom()方法解析信息,并作出回应,响应客户端。
无论是三维还是二维界面客户端,接收服务器信息的方法都是一致的。从服务器接收的状态信息经过解码后存储在CDistributedNetData类中,其中各个成员字段代表了各个节点的状态,主要分为bool、int和float三种状态类型,用于记录开关、多位旋钮和显示仪表等多种元器件的状态变化[14]。三维端主要负责虚拟机舱场景的实时渲染和人机交互,通过实时更新虚拟场景中交互实体的状态,接收从数学和逻辑模型端发送的实时仿真数据,通过通信协议实现轮机二维软件与三维虚拟机舱的连接[6]。
6 结 语
本文针对电喷柴油机缺少整体仿真模型而在虚拟仿真系统控制方面存在缺陷这一问题,利用MATLAB/Simulink软件搭建了电喷柴油机的整体仿真模型,以仿真模型为逻辑控制核心开发了主机部分的虚拟仿真系统。在Visual Studio的集成开发环境下,利用C#语言开发了可视化的二维模拟器软件,并基于3DMax和Unity3D引擎,开发了主机部分三维虚拟实验室,实现了基于UDP协议的虚拟仿真系统的实时通信。文章阐明了虚拟仿真系统开发过程的许多关键技术问题,仿真简化了共轨系统相关精密阀件(诸如安全阀、调节阀等)的控制机制,与实机运行存在一些差异,同时由于虚拟仿真环境构筑可能存在的不完整性,在极限区间或特殊情况下可能会出现仿真数据缺失的问题。但就应用于虚拟仿真系统,在反复的调试过程中未出现该极端情况,仿真模型在二维和三维端运行良好,极大地提高了用户的情景意识。
