高速场景下自动驾驶组合定位系统研究
2023-02-16朱珩
朱珩
(苏州智加科技有限公司,江苏 苏州 215100)
汽车自动驾驶主要包含环境感知、导航定位、决策规划和控制执行等四大部分。其中定位技术是自动驾驶解决方案中不可或缺的一部分,它的目标是准确感知汽车在全局环境中的相对位置,将自身看作一个质点并与周围环境有机地结合起来。定位技术为汽车自动驾驶提供基本的位置导航信息,其精度将直接决定自动驾驶的安全性和可靠性。自动驾驶定位技术按照原理不同可分为3类:第一类是基于信号的定位,例如GNSS;第二类是航迹推算,根据前一时刻的位置和方位推算当前的位置和方位,例如IMU等;第三类是环境特征匹配,用观测到的特征和数据库中的特征和存储的特征进行匹配,得到当前的位置和姿态,例如Lidar等。
为了提高在高速等复杂场景下汽车自动驾驶定位技术的稳定性,在实际应用中一般采用组合定位方案,常见组合方式为GNSS/INS组合。
GNSS和INS有着截然不同的优缺点,GNSS的优点是长期精度高、误差不随时间增大且设备成本较低;缺点是它的导航信息不够全面、输出频率偏低、卫星信号容易受到干扰以及在室内等环境下接收不到卫星信号而无法使用。而INS的优点是自主性强、动态性能好、导航信息全面且输出频率高;但其缺点是定位误差随时间不断积累,长期精度较差。从上述对INS和GNSS的优缺点描述中可以看出,2种系统具有非常好的互补特性,因而GNSS/INS组合导航可以有效克服单一导航系统的缺点,提供高频率的导航信息(位置、速度和姿态)并在长短期导航任务中均能具备较高精度及良好的稳定性。
采用基于卡尔曼滤波的最优估计方法,融合GNSS和INS导航定位信息,可以得到高可靠性的导航结果,GNSS还能够有效降低INS数据误差漂移,而INS可以在GNSS信号中断时提供连续的导航信息。典型的GNSS/INS组合系统架构如图1。

图1 GNSS/INS组合系统架构
图1中滤波器通常可以选择卡尔曼滤波(KF)或KF各种变体如LKF、EKF等方法,它会针对INS和GNSS输出的导航信息进行比对求差,估计载体位置、速度和姿态等一系列状态参数的偏差并对组合导航结果进行修正。图中虚线部分描绘的是组合导航系统可选的链路,该链路的建立方式取决于组合导航的模式。
1 误差反馈模式
在GNSS/INS组合导航系统中,通常采用两种误差反馈机制,即开环结构和闭环结构。
1.1 开环结构
在开环结构中,针对载体位置、速度和姿态等状态参数的修正过程将在INS设备外部完成,然后,参数估计误差会在每次迭代计算时从INS的输出结果中相应扣除。在这种情况下,状态参数误差或修正的状态参数不会反馈至INS系统。开环结构设计如图2。

图2 GNSS/INS组合开环结构
开环结构的优点在于当卡尔曼滤波器出现异常情况时,组合导航系统仍然可以输出原始的INS结果以支持完好性监测及确保导航服务连续运行。但是,由于INS的惯性漂移没有经过补偿,惯导误差随时间不断累积,会不可避免地导致线性系统假设失效。因此,开环结构的稳定性与卡尔曼滤波器相关性较强,更容易导致卡尔曼滤波器性能下降。
1.2 闭环结构
在闭环结构中,由卡尔曼滤波器估计的状态参数误差通过反馈的形式对INS进行误差修正,此种情况下,INS的输出即是组合导航结果。当误差估计反馈完成后,载体滤波的位置、速度、姿态等状态参数将重置为0。闭环结构设计如图3。
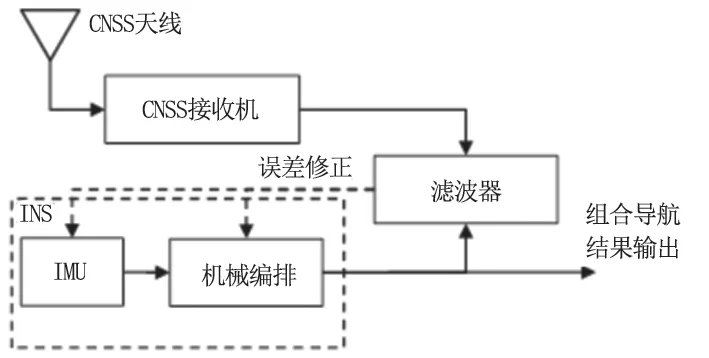
图3 GNSS/INS组合闭环结构
由图3可以看出,卡尔曼滤波器估计的加速度计和陀螺仪误差在每个周期内会通过反馈来修正IMU测量值,然后,用于计算系统模型。
2 组合导航类型
GNSS/INS组合导航类型通常有3种:松组合、紧组合及深组合。
2.1 GNSS/INS松组合
在GNSS/INS松组合结构下,GNSS和INS相互独立工作并提供各自的导航信息。为了提高导航性能,松组合通常会首先将GNSS输出的载体位置和速度输入卡尔曼滤波器,同时,INS预测的位置、速度和姿态等参数也作为滤波器的输入。滤波器针对两种导航信息进行求差并基于相应的误差模型估计INS状态参数误差。然后,采用这些误差参数修正INS导航结果并得到组合导航解。松组合模式的特点在于GNSS系统单独使用一套滤波器,其架构图,如图4所示。

图4 GNSS/INS松组合架构
GNSS/INS松组合模式易于实现,在开环结构下可以提供3种导航信息(原始GNSS导航结果、原始INS导航结果及组合导航结果);而在闭环结构下可以提供两种导航信息(原始GNSS导航结果和组合结果)。松组合模式的主要缺陷在于当GNSS有效卫星数不足时,无法提供GNSS辅助信息,并且由于卡尔曼滤波假设要求观测噪声是与时间无关的白噪声,而GNSS滤波输出的导航信息是时间相关的,所以这种特性会影响滤波性能,继而影响组合系统性能。
2.2 GNSS/INS紧组合
GNSS/INS紧组合是一种集中式的组合模式,它仅使用一个滤波器。该模式将GNSS距离观测量和距离变化率观测量与相应的INS预测值求差后输入卡尔曼滤波器估计INS状态参数误差,因此,INS的输出经过误差修正后即可得到组合导航结果。紧组合架构如图5。
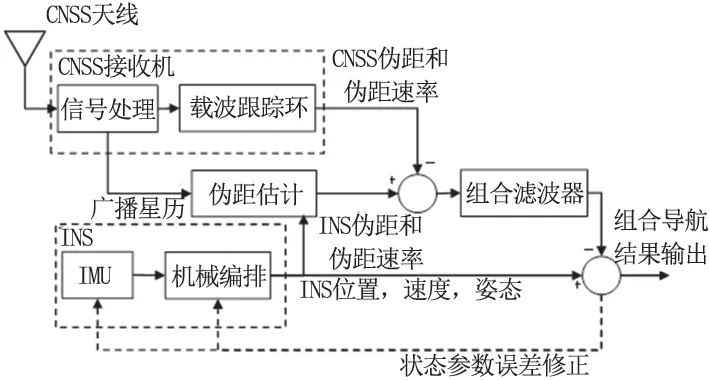
图5 GNSS/INS紧组合架构
由于紧组合模式在滤波时采用的是GNSS原始观测值,因此,可以避免松组合模式中因卡尔曼滤波器级联产生的测量时间关联问题。此外,紧组合可以在导航系统接收的GNSS有效卫星数小于4颗时提供GNSS量测更新,这种特性使得组合导航系统在城市、森林和峡谷等特殊场景下仍然能获得连续稳定的导航信息。另一方面,由于紧组合模式需要在滤波器中处理GNSS原始观测值,因此,其实现方式比松组合更加复杂,同时,紧组合模式的局限在于它无法输出原始GNSS导航结果。综合来说,在GNSS/INS使用相同硬件条件下,紧组合模式可以取得在导航性能和鲁棒性上均优于松组合的导航结果。
2.3 GNSS/INS深组合
GNSS/INS深组合是一种新兴的组合模式,是一种深层次的、硬件层面的组合方式。与松组合、紧组合模式相比,深组合在GNSS接收机端采用回环校正结构,直接将相关器输出的I/Q数据作为组合导航卡尔曼滤波器的输入,实现GNSS接收机相关器输出的I/Q信号与INS导航参数的融合,利用修正后的INS导航信息控制调整码/载波数控振荡器。因此,在深组合结构中,GNSS与INS将不再是相互独立的系统,该方案通常需要接入GNSS内部硬件,实现方式比较复杂,其架构如图6。

图6 GNSS/INS深组合架构
可以看出,深组合模式下相关器输出的I/Q信息在理论上满足观测噪声相互独立的特性,因此,深组合模式具有理论上的全局最优特性。深组合模式便于GNSS接收机与INS进行一体化设计,实现GNSS接收机和INS两者之间相互辅助,可以降低跟踪频率,提高抗干扰能力。深组合模式使得导航系统可以在较低的信噪比下工作,并且在卫星信号失锁的情况下依然能够得到GNSS导航信息。
3 结语
汽车定位技术旨在明确车辆相对全局的绝对位置或相对交通参与者的位置,其准确性直接影响自动驾驶系统的安全性。当前,在复杂的真实道路环境中面向自动驾驶的定位技术还不够成熟。本文首先总结了当前GNSS/INS组合导航定位3种组合模式的特点,不同模式实现GNSS和INS导航信息融合的方式在软件与硬件方面具有不同复杂度,在车载应用时应基于导航设备成本、导航算法设计与导航性能需求等各个方面确定GNSS/INS组合模式。同时,本文提出了一种适用于高速场景下汽车自动驾驶的低成本组合导航定位系统模型,确定系统状态参数,分别建立系统状态方程及量测方程,然后,采用卡尔曼滤波进行滤波参数求解。
