一种速率积分半球谐振陀螺自校准方法
2023-02-16王灵草韩世川陈朝春卜继军
肖 凯,王灵草,韩世川,陈朝春,雷 霆,卜继军
(中国电子科技集团公司第26 研究所,重庆 400060)
半球谐振陀螺通过测量半球壳谐振子绕中心轴旋转时的哥氏效应来测量角速率,具有精度高、体积小、功耗低、重量轻、启动速度快、抗干扰能力强、抗高过载及抗核辐射等优点[1-2]。与光纤陀螺和激光陀螺相比,半球谐振陀螺具有更高的性能/体积比,在同等体积下,可以实现更高的精度[3],同时半球谐振陀螺无转子和活动支承、无光源及反射镜等损耗部件,具有很高的可靠性和很长的寿命。
美国是第一个研制半球谐振陀螺的国家,目前美国研制的半球谐振陀螺主要应用于卫星、空间飞行器,代表产品为Northrop Grumman 公司的HRG130P 型半球谐振陀螺。该陀螺为3 件套构架,由激励罩、谐振子及敏感基座组成,工作于力平衡模式下,零偏稳定性小于 0.0015 °/h,角度随机游走系数小于0.00015 °/h1/2,具有极高的可靠性。截止2018 年底,共有超过125 套半球谐振陀螺系统执行空间飞行任务,总时长超过4000 万小时,任务100%成功,充分验证了半球谐振陀螺的高可靠性、长寿命及连续工作时间长的优势[4]。
法国Safran 公司研制的半球谐振陀螺采用了2 件套构架,相对于3 件套构架,其整体加工及装配难度大幅减低,生产效率大幅提高。Safran 公司半球谐振陀螺除Regys20 外,均为工作于全角模式的速率积分陀螺。同时,采用自校准技术进行参数实时辨识和补偿,具备不需要外部设备即可完成陀螺标校的“自我校准”功能,大幅降低温度、长期老化等因素对陀螺性能的影响,保证了陀螺的长期工作精度。PRIMUS400惯性测量单元零偏误差优于0.01 °/h[5],OYNX 惯性导航系统中的半球谐振陀螺零偏误差优于0.001 °/h,MTBF 高达100 万小时。2018 年Safran 向市场提供的半球谐振陀螺组件及系统总数已达10000 套[3],在陆用导航、寻北、导弹、舰船、潜艇中均得到成功应用。
在速率积分模式下,由于非理想半球谐振子存在周向阻尼不均匀引起的驻波周向漂移,速率积分半球谐振陀螺存在与驻波位置相关的漂移。在速率模式下,这种漂移表现为陀螺零偏。谐振子周向阻尼随温度、时间等的变化进一步表现为零偏的变化,是制约零偏稳定性、零偏重复性指标进一步提高的主要因素。文献[6]提出通过“模式反转”将检测电极与驱动电极互换,使零偏误差的符号反向,从而将零偏误差从外界转速中分离,实现零偏的校准。但为了保证陀螺输出在电极互换过程中不受影响,需要增加1 只附加陀螺,增加了硬件复杂度。文献[7]提出了一种振动陀螺的自校准思路,通过自进动和频率调制,进行参数的辨识和角速率解算,使得QuapasonTM振动陀螺的漂移从48 °/h 下降到13 °/h。文献[8]通过驱动振型自进动平滑了阻尼引起的周向正弦漂移,使得零偏稳定性提高了一个数量级。
本文首先从半球谐振陀螺的二维振动模型入手,推导了半球谐振陀螺的基本控制模型;进而分析了驻波角周期性自进动与频率调制结合的自校准技术提高陀螺精度的机理和实现方法;最后在半球谐振陀螺上实现了自校准,完成了模型参数的辨识及外部转速的实时解算,并通过实测陀螺性能对自校准的效果进行了评估。
1 半球谐振陀螺的工作原理
半球谐振陀螺的基本工作原理是半球谐振子在四波腹驻波振动下,当谐振子沿中心轴旋转时,由于哥氏效应,驻波振型相对谐振子壳体发生进动,通过测试振型进动即可测出载体旋转信息。
图1 为半球谐振陀螺旋转时的四波腹驻波振型图。陀螺工作时,半球谐振子在电路系统控制下进入n=2 的振动模态,在这种振动模态下,谐振子唇缘周长为波长的2 倍,形成具有四个波腹和四个波节的驻波状态。当陀螺旋转时,在哥氏力的作用下,驻波位置会发生进动,导致波腹/波节的旋转角度小于陀螺相对惯性空间旋转的角度,这个滞后角的比例是固定的,约为旋转角的30%,即基座旋转90 °,驻波滞后约为27 °。

图1 半球谐振陀螺驻波进动示意图Fig.1 Standing wave precession in HRG
通过控制力将驻波角固定在预设位置的模式为力平衡模式(Force To Rebalance,FTR),该模式下进动控制力与角速率成正比,是一种角速率陀螺,也称为速率模式,角速率的测量范围一般为几°/s~十几°/s,多用于载体运动较为平稳的应用,例如卫星及空间飞行器。
全角模式(Whole Angle,WA)下陀螺振型在输入角速率的积分效应下自由进动,不受控制系统的约束,驻波角度是角速率的积分,也称为速率积分模式。其角速率测量范围可达几百°/s~几千°/s 甚至更高,同时具有良好的动态响应特性。但因为速率积分模式下振型在整个谐振子上自由进动,此时阻尼不均匀性、频率裂解及电路增益误差等因素的影响也使得影响其精度的因素更多,陀螺的控制也更加复杂[9,10]。
2 半球谐振陀螺的控制模型
在一个二维平面中,半球谐振陀螺等效质量块的位移(x,y)可以表达为:

其中,主振动振幅为a,与其时间上相差90° 相位的正交振动的振幅为b,θ为驻波角,对于一个理想的四波腹振动,正交振动振幅b被控制到0。
半球谐振陀螺的二维振动运动方程可以用下面的模型表达[7,11]:

其中,F为控制力,幅度控制量fa,频率控制量fω、进动控制量fp、正交振动控制量fq通过其在时间和空间上的分布共同组成控制力F。m为等效质量,dmc、dms为质量不均匀性系数,c为平均黏性阻尼系数,dcc、dcs为阻尼不均匀性系数,k为平均刚度,dkc、dks为刚度不均匀性系数。ω0为平均谐振角频率,平均角频率ω0满足:ω0=(k/m)1/2。ω为角频率,δω为角频率偏移,满足关系ω=ω0+δω。α为Bryan 系数,即进动系数,Ω为载体旋转角速率。Q为品质因数,满足:Q=mω0/c。
将正交振动振幅b控制到0,忽略高次微分量和部分小量,解微分方程可以得到:
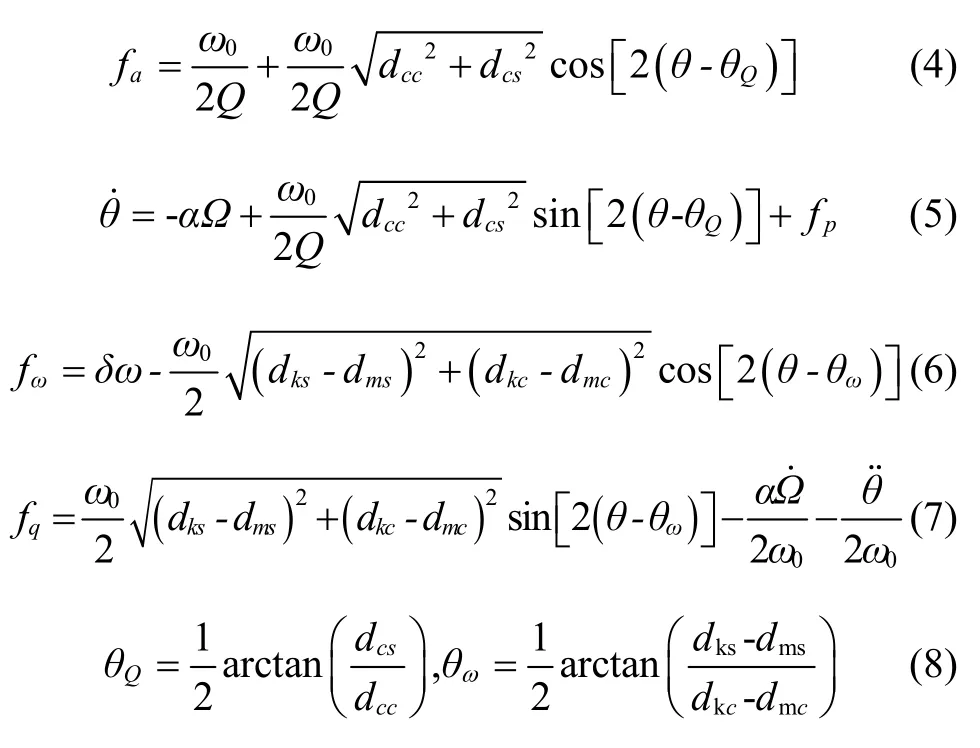
式(4)-(8)表明,可以通过4 种控制力分别对陀螺进行振幅、进动、正交及频率控制。阻尼及其周向分布产生周期为π 的正弦型驻波周向漂移,周向漂移的位相由阻尼轴偏角θQ决定,阻尼及其分布对振幅控制通道的影响与对驻波进动的影响存在90 °的相位差。类似的,刚度分布会导致在正交通道产生周期为π 的正弦型正交变化,其位相由刚度轴偏角θω决定,刚度分布对频率通道的影响与对正交通道的影响存在90 °的相位差。
实际的驻波周向漂移曲线除主要的正弦成分外还可能存在高次谐波和畸变,这是由于阻尼的其他阶次分布、力的耦合等其他因素综合导致的。
3 自校准方法
由于驻波在不同的角度位置有不同的固有漂移速率,使得输出角速率在每一时刻都有由驻波位置决定的角速率误差,且该速率误差与输入角速率大小无关,因此可以认为速率积分半球谐振陀螺的精度取决于周向漂移极值。
受限于谐振子加工工艺水平,周向漂移极值一般为几°/h~几十°/h,因此必须设法消除或减小周向漂移,速率积分半球谐振陀螺才有可能达到导航级陀螺的精度要求。由于周向漂移取决于阻尼及其分布,类似的也取决于品质因数及其分布,且由于器件老化等原因,品质因数是不稳定的量[12],品质因数的周向分布也并不固定,受温度、时间、加速度、真空度等多种因素的影响,因此周向漂移处于长期缓慢变化中,难以建立模型进行预先补偿。
速率积分半球谐振陀螺的自校准技术利用周向漂移曲线是近似正弦曲线,其均值近似为0 的特性,通过进动控制力推动驻波主动旋转进动,利用周向漂移的π 周期性辨识出阻尼引起的周向漂移等误差,对这些误差进行补偿,在消除周向漂移的影响的同时使得半球谐振陀螺精度大幅提高。

解出外部转速为:

如能辨识出阻尼分布,则能通过式(10)将阻尼引起的漂移进行实时补偿,进而使每个时刻的陀螺输出均不受阻尼分布影响,陀螺的长期工作零偏也将得到补偿。
考虑到在长期工作或温度改变导致回路增益改变δ时,转速表达式为:

式(11)表明,增益变化会对角速率的解算带来较大的影响,如果驻波始终在单方向上进动,则fp的符号始终保持不变,虽然周向漂移在π 周期上积分为0,但会产角速率误差δfp,导致积分出的角度误差不断累积。如进动方式为驻波角0→π→0 往复进动,则fp的符号在不断正负切换,一个自校准周期内积分角度误差可以相互抵消。为了消除增益变化量δ带来的角度积分误差的累计,自校准采取驻波角0→π→0 往复进动的方式。
考虑增益的变化时半球谐振陀螺的二维振动运动方程可以写为:

其中,K为2×2 的增益矩阵。
由于振幅及频率通道不受外部转速的影响,而正交通道受角加速度的影响较大,可在自校准时使用振幅及频率通道进行参数计算。在由振幅及频率通道组成的线性模型中,增益、阻尼分布、刚度分布及Q值等参数为需辨识的未知参数,各控制量及驻波角度为已知量,通过最小二乘法,完成未知参数辨识。为提高增益的辨识度,在频率通道施加调制,使增益能够在激励下更容易辨识。完成参数的辨识后,通过进动通道解算计算外部角速率。
综合以上分析,通过控制系统的强制自进动和调制,辨识出周向漂移曲线变化和增益变化,可实时修正输出角速率,实现陀螺在工作状态时的自校准。
4 自校准半球谐振陀螺样机及测试结果
选取一套自主研发的3 件套半球谐振陀螺进行自校准技术的性能评估,实测其谐振子的Q值约500 万,周向漂移峰峰值约58 °/h。图2 为该半球谐振陀螺的实物照片。
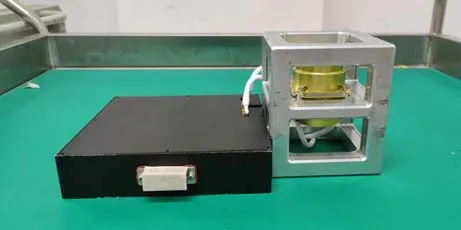
图2 用于自校准试验的半球谐振陀螺Fig.2 Hemispherical resonator gyroscope used in self-calibration experiment
半球谐振陀螺电路主要包括前级放大电路、驱动电路、AD 转换电路、DA 转换电路及数字处理电路。数字处理采用FPGA+DSP 架构,FPGA 负责时序管理、AD 及DA 的控制、锁相环控制及调制解调工作,DSP负责环路控制运算和自校准运算。
一个自校准周期内的总时间为T1+T2,在T1时间内,将驻波正向从0 推动到π,在T2时间内,将驻波反向从π 推动到0,同时通过fω进行频率调制,调制方式可据实际情况及具体需求调整及配置。
在半球谐振陀螺经过检测及驱动误差补偿后,控制驻波在0→π→0 驻波角上往复进动及频率调制,通过参数辨识,并解算出外部角速率,试验中陀螺敏感轴对准东向,此时陀螺输出即为零偏。半球谐振陀螺的自校准试验时间为20 小时。
辨识出的X、Y 轴振动增益变化情况如图3 所示,可以看出X、Y 轴存在约0.15%的增益误差,X、Y 轴增益呈现相似的随着时间而缓慢增大的趋势。谐振子的阻尼不均匀性系数变化情况如图4 所示,阻尼不均匀性系数的变化不明显,这是因为在20 小时的试验中,阻尼分布较为稳定。
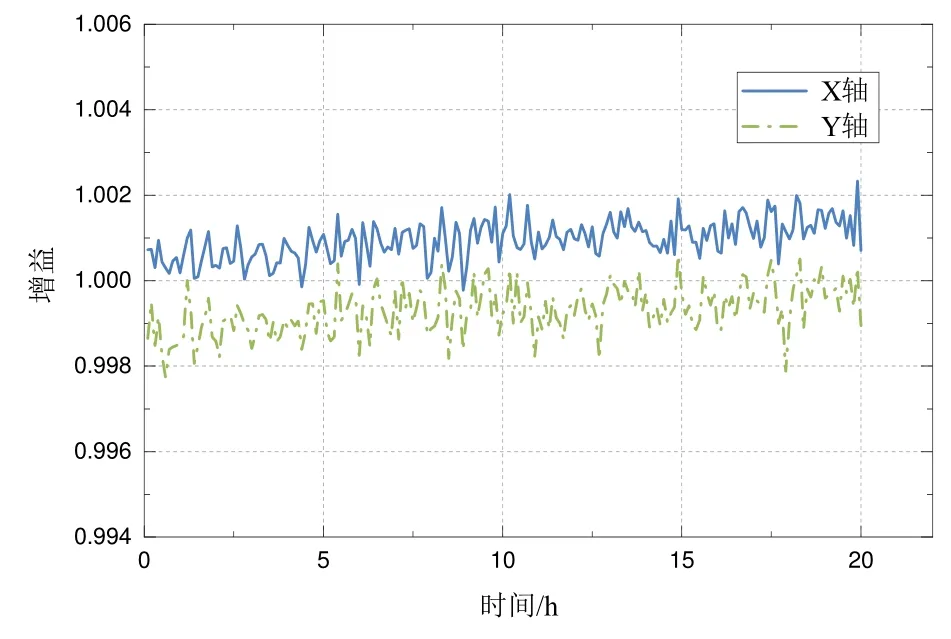
图3 X 轴及Y 轴振动增益Fig.3 Vibration gains of X axis and Y axis
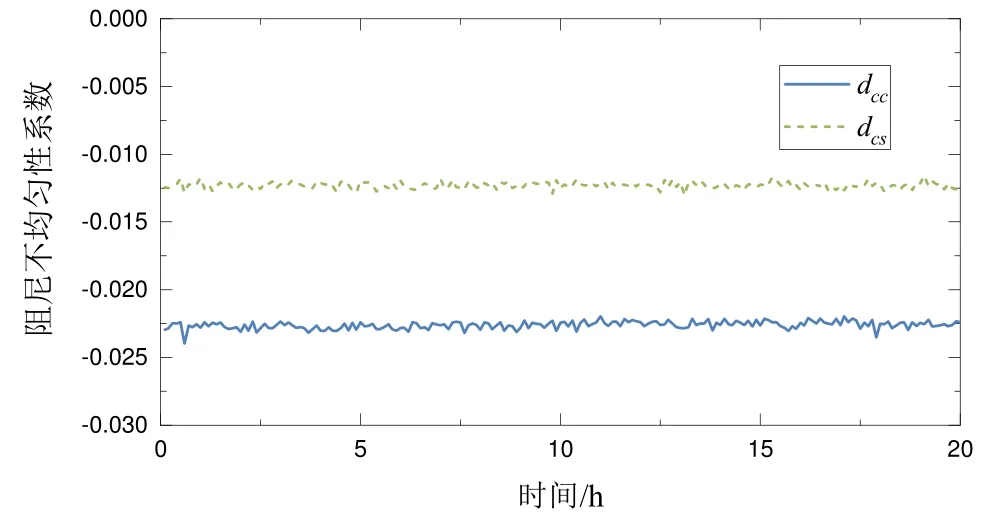
图4 谐振子的阻尼不均匀性系数Fig.4 Damping anisotropic parameters of the resonator
图5 为最后一个自校准周期的周向漂移计算值及自校准试验结束后的实测周向漂移,两组漂移曲线吻合较好,证明自校准技术比较准确地辨识出了半球谐振陀螺的周向漂移。
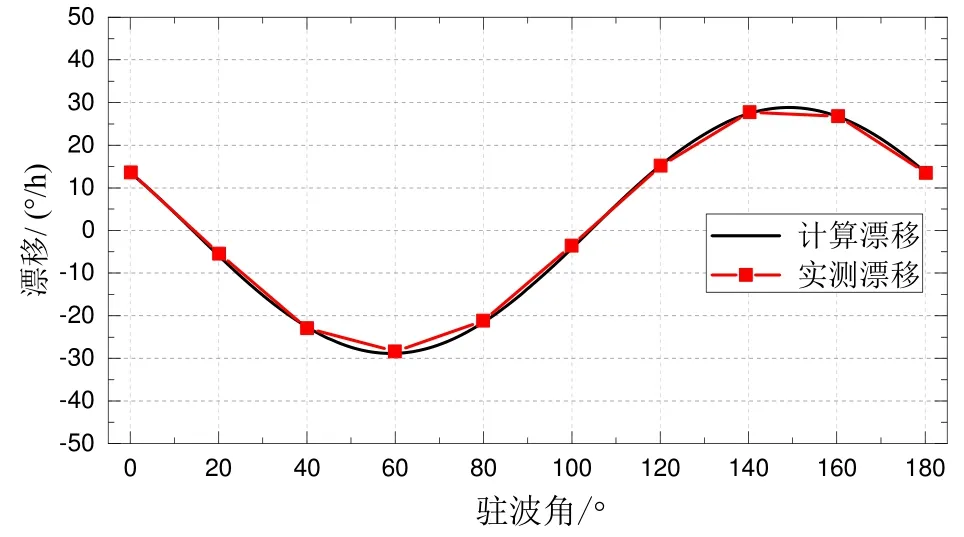
图5 实测周向漂移及自校准方法计算的周向漂移Fig.5 Measured drift and computed drift using the self-calibration method
图6 为从0 时刻开始的积分角度误差随时间变化曲线,其中每个点对应从0 时刻开始到该点时刻的陀螺输出角速率积分,即从0 时刻开始到该点时刻的总角度误差。20 小时的测量时间内陀螺的积分角度误差在-0.12 °~0.25 °之间,0~5 小时内积分角度误差在-0.1 °~0.24 °之间,5~10 小时内积分角度误差在-0.08 °~0.25 °之间,10~15 小时内积分角度误差在-0.05 °~0.2 °之间,15~20 小时内积分角度误差在-0.12 °~0.19 °之间,不同时段的积分角度峰峰值区别较小,在长时间工作时,积分角度误差不随时间累积,这也是自校准技术可长期保精度工作的突出优势。

图6 从0 时刻开始的陀螺积分角度误差Fig.6 Integrating angle error of gyro from startup
当陀螺工作于普通全角模式时,工程应用中在外界角速率的作用下,驻波位于周向漂移曲线的位置是不确定的,可近似地认为零偏稳定性约为周向漂移曲线的峰峰值的三分之一,即19.3 °/h。自校准模式下的零偏稳定性为0.52 °/h (100 s 平滑,1σ),高于普通全角模式的零偏稳定性。
图7 为自校准期间从0 时刻开始的平均零偏随时间变化曲线,图中t时刻对应的纵轴值为0 时刻到t时刻时间内陀螺零偏的均值,此值也等于图6 中相应时刻t的积分角度误差除以总积分时间t。因为不同时段的积分角度误差峰峰值区别较小,故图7 中从0 时刻开始的平均零偏随工作时间的增加而总体减小,开始工作时平均零偏最大为0.24 °/h,工作2 小时后零偏减小到0.06 °/h 以内,工作10 小时后零偏减小到0.018 °/h 以内。陀螺输出平均零偏远小于周向漂移58 °/h,自校准方法对于消除周向漂移的影响,提高陀螺长时间工作精度效果非常明显。
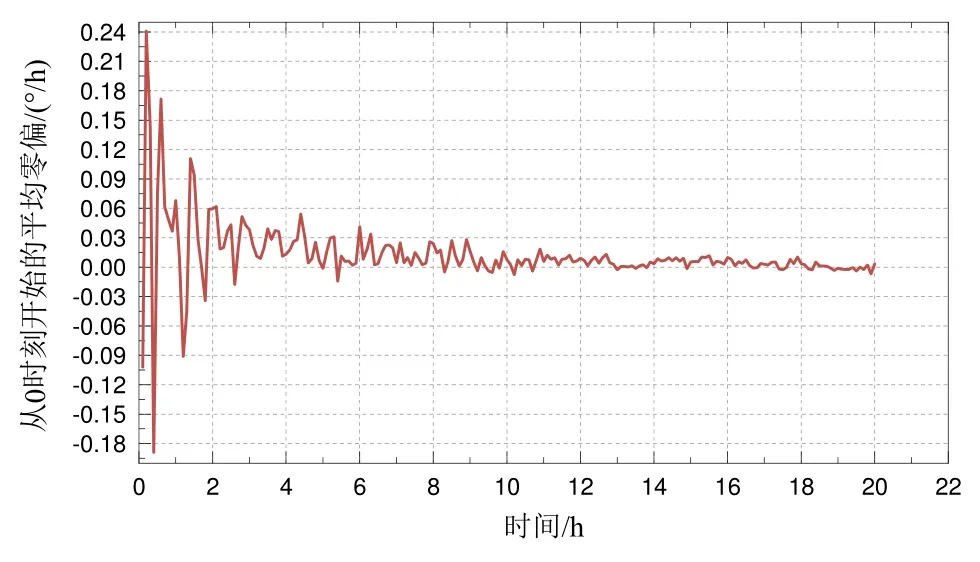
图7 从0 时刻开始的陀螺平均零偏Fig.7 Average bias of gyro from startup
由于自校准周期内辨识出的模型参数的误差和噪声,及其他高次残余误差的影响,导致了解算出的图6 中的积分角度误差的波动,后续工作中将重点分析和降低这些误差的影响,以提高短时工作精度。
5 结论
通过驻波角自进动与频率调制相结合的自校准方法,实时对速率积分半球谐振陀螺进行模型参数辨识、周向漂移的实时补偿及角速率的实时解算。
速率积分半球谐振陀螺样机采用自校准方法进行了连续20 小时的静态测试。启动2 小时后从0 时刻开始的平均零偏为0.06 °/h,10 小时后稳定在0.018 °/h以内,零偏不受周向漂移影响,角度误差不随时间累积,角速率误差长时间保持稳定,展现了速率积分陀螺自校准技术的独特优势,验证了自校准方法的有效性,实现了速率积分半球谐振陀螺关键技术突破,该方法在陀螺静态或动态条件下均可实现不间断的自校准,无须任何翻转或旋转辅助装置,能够有效消除器件各种变化因素带来的影响,实现长期保精度、免标校,满足武器装备对陀螺长寿命、高可靠、免维护的迫切需求,为速率积分半球谐振陀螺工程应用打下了良好基础。
