一种石英挠性加速度计非线性误差系统级标定方法
2023-02-16贾继超
贾继超,王 萌,刘 鑫,张 宇,王 猛
(航天科技集团 九院16 所,西安 710100)
随着大过载高动态复杂作战环境下捷联惯导系统导航精度要求不断提高,且制造更高精度惯性仪表能力有限的情况下,开展石英挠性加速度计(以下简称石英加计)非线性误差参数标定补偿技术研究是提高捷联惯导系统应用精度的一个重要途径。基于重力场的多位置标定方法对石英加计非线性误差激励较小,非线性误差参数辨识精度不够理想,标定结果难以满足大过载高动态作战环境的需要[1-2]。因此需要使用离心机、火箭撬、线振动台等设备模拟产生大过载的环境,以充分激励石英加计非线性误差,实现高精度标定,其中利用离心机标定石英加计非线性误差参数最为常用[3]。
离心机上对单个石英加计的仪表层级标定方法比较成熟,但当捷联惯导系统中的石英加计误差参数发生变化时,仪表层级标定需要将石英加计从系统中拆卸下来标定,重新安装可能会导致系统各误差参数发生变化[4-8]。根据标定思想的不同,对石英加计组合的系统层级标定可分为分立式标定和系统级标定,分立式标定精度受到离心机精度制约[9-10]。系统级标定可减小对离心机的精度要求,比较适合实际使用。目前对石英加计组件在离心机上的系统级标定方法主要针对平台惯导系统。文献[11]设计了一种6 位置辨识方案,利用扩展卡尔曼滤波的方法辨识出了平台惯导系统中与加速度高阶项相关的误差参数。文献[12]利用扩展卡尔曼滤波器,设计了离心机上平台惯导系统石英加计高阶误差参数标定方法。
平台惯导系统隔离角运动的特性可减小离心机高速旋转对标定精度产生的影响。但如果使用单轴离心机开展捷联惯导系统石英加计非线性误差参数系统级标定时,受制于离心机臂长有限,产生大的过载需要大的转速,转速过大会影响陀螺测量精度,进而影响标定精度。
针对上述标定方法中需要拆卸标定或标定精度不高的问题,本文在分析捷联惯导系统石英加计非线性误差参数对导航误差影响的基础上,设计了一种基于双轴精密离心机的双轴捷联惯导系统石英加计非线性误差参数系统级标定方法。双轴捷联惯导系统(以下简称捷联惯导)内部安装有双自由度旋转的转位机构,该机构可驱动捷联惯组进行位置翻转。本方法利用转位机构实现捷联惯组的9 位置翻转,每个位置上双轴精密离心机主轴、方位轴等角率同步反转20 整周,即可实现石英加计非线性误差参数免拆卸高精度标定。
1 石英加计误差模型
1.1 石英加计非线性脉冲测量模型
根据IEEE 关于石英加计的相关测试规范[13],对于单个石英加计建立如式(1)的非线性脉冲测量模型:

式中,A为石英加计的脉冲输出;K0为石英加计的常值零偏;fi、fo和fp分别为沿石英加计输入轴、输出轴和摆轴方向上的比力分量;K1为石英加计的标度因数;K2为输入轴方向上的二次项误差参数;Kio、Kip分别为输入轴与输出轴、输入轴与摆轴之间的交叉耦合项误差参数。
1.2 石英加计组件非线性误差模型
捷联惯导由陀螺仪、石英加计组件及转位机构组成。图1 为石英加计组件内部加速度计各轴相对取向。

图1 石英加计组件内部示意图Fig.1 Internal schematic diagram of accelerometer combination
石英加计组件输入输出模型为:

式中,NA为三轴石英加计脉冲增量,单位:∧(脉冲数);ts为采样时间,单位:s;K1为石英加计标度因数,单位:∧/(s·g);K0为石英加计常值零偏,单位:g;Ka为石英加计安装误差角,单位:rad;K2为石英加计二次项误差参数,单位:g/g2;K2c为石英加计交叉耦合项误差参数,单位:g/g2;fb为在载体坐标系下,三轴石英加计输入轴方向上的比力,单位:g。各参数的具体形式如下:

各矩阵中的x、y、z分别表示捷联惯导x、y、z三个轴方向上的石英加计。
由式(2)解算得到比力输入为:

1.3 石英加计组件线性误差模型及标定
为降低标定复杂度,提高标定精度,进行非线性误差参数标定前需对捷联惯导线性误差参数标定并补偿。石英加计线性误差参数标定模型为:

对上述模型中的K0,K1,Ka进行标定后,根据捷联惯导脉冲增量输出得到比力输入。该模型忽略了石英加计非线性误差参数的影响,因此将该模型下解算的比力记为,解算方程为:

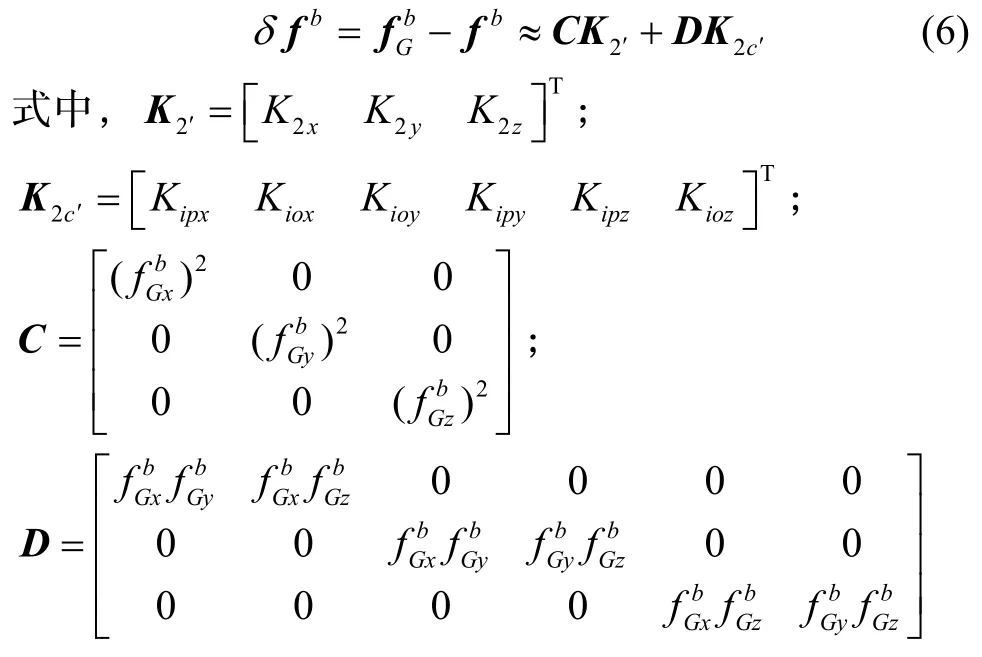
1.4 比力解算误差
根据式(3)和式(5)可得比力解算误差,忽略二阶及以上小量的影响,比力解算误差方程为:
2 系统滤波器设计
理想情况下捷联惯导的导航速度方程为:

实际解算导航速度方程为:

忽略重力误差,速度误差方程为:

选用北-东-地坐标系为导航坐标系,忽略地理信息带来的误差,式(9)中的各变量为:

结合式(6),将式(9)改写为:

捷联惯导姿态误差方程为:

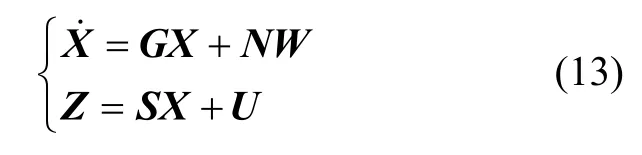
式中,状态向量和量测向量分别为:

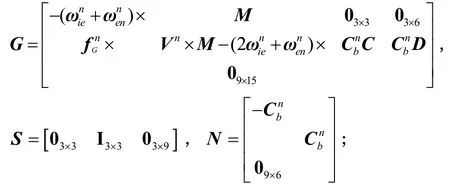
状态转移矩阵、量测矩阵、噪声分配阵分别为:
状态噪声、量测噪声分别为:
在离心机静止,捷联惯导转位机构转动到下一位置的过程中只进行卡尔曼滤波状态更新,防止因捷联惯导中的杆臂误差及其它误差影响标定精度。
3 标定方案设计
3.1 双轴精密离心机及其同步反转模式
本文应用双轴精密离心机对捷联惯导中的石英加计非线性误差参数进行标定,双轴离心机的结构示意图如图2 所示。

图2 双轴离心机示意图Fig.2 Schematic diagram of 2-DOF centrifuge
当双轴精密离心机处于同步反转工作模式时,主轴与方位轴以大小相同、方向相反的角速度转动。此时离心机捷联惯导安装台面上各点加速度大小方向相同,不存在比力梯度。安装台面上的捷联惯导运动形式为平动,可减小角速度测量精度对捷联惯导石英加计非线性误差参数系统级标定的影响,保证高精度姿态更新解算,提高标定精度。
图3 为同步反转模式下的转动示意图,双轴精密离心机主轴l1、方位轴l2、水平轴l3。现将一加速度计放置在离心机捷联惯导安装台面上任意位置P点处,主轴和方位轴转动角速率为ω,转动方向相反。
由图3 可知,安装面上任意一点P与点O2的连线时刻平行且相等,因此PO2在空间中作平移运动,各点的加速度大小及方向均相同。相较于单轴离心机,双轴离心机的同步反转模式隔离了离心机主轴旋转产生的高速角运动,陀螺仪只敏感到地球自转角速度。以离心机臂长5 m,向心加速度25g为例,离心机转速将高达401°/s。采用单轴离心机对石英加计非线性误差参数进行系统级标定时,高额转速将严重降低姿态解算精度,进而影响标定精度。
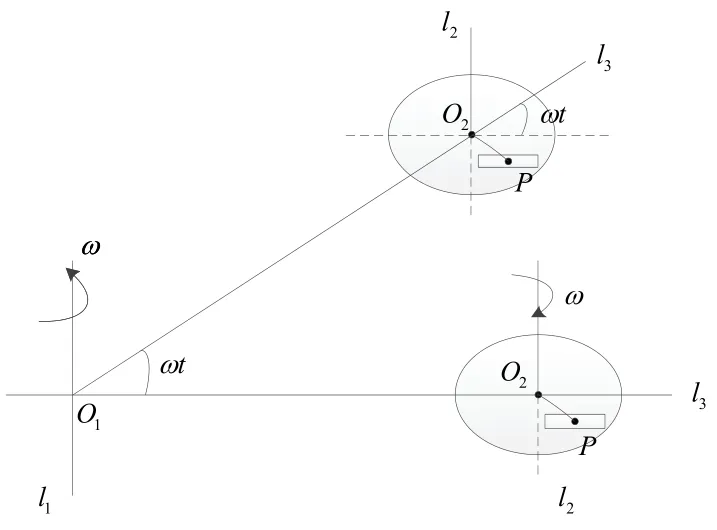
图3 同步反转模式下双轴离心机示意图Fig.3 2-DOF Centrifuge schematic diagram in synchronous reversal mode
3.2 9 位置标定方案
基于式(2)的石英加计组件输入输出模型,在可观测性分析的基础上,设计了一种9 位置标定方案:双轴精密离心机在每个位置同步反转20 整周后静止,离心机静止时捷联惯导转位机构转动,从当前位置转动到下一位置,各位置如图4 所示。转动到位后转位机构停止,离心机同步反转,重复上述操作直至最后一个位置标定结束。图4 中内框与外框即转位机构,内框与z轴石英加计固连,外框固定在捷联惯导壳体上,方位保持不变,始终指向东向。在内框和外框的作用下,捷联惯组实现多位置翻转。

图4 9 位置下3 轴加速度计的输入轴指向示意图Fig.4 Schematic diagram of the input axis of the three accelerometers at 9 positions
4 仿真验证
设置仿真条件:g为9.79397m/s2,纬度为北纬34.1623°,离心机提供25g和30g两种大小的激励,采样时间为10 ms。角度随机游走为0.0005°/,速度随机游走为1μg/。
经蒙特卡洛仿真,得到参数标定的平均值和方差如表1 所示,标定过程滤波曲线如图5-7 所示。
根据表1 的仿真结果和图5-7 的仿真曲线可知,三轴石英加计的9 个非线性误差参数均收敛到预设值附近。其中,二次项误差参数标定精度优于1.0×10-6g/g2,交叉耦合项误差参数标定精度优于1.5×10-6g/g2,且整个标定过程可在500s内完成,满足高精度捷联惯导标定的准确性和快速性需求。
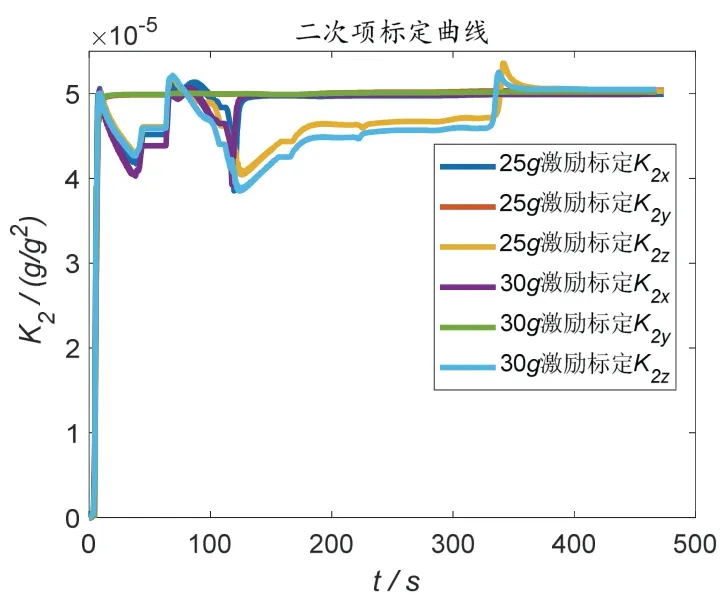
图5 二次项标定曲线Fig.5 Quadratic coefficient calibration curves

图6 输入/摆轴交叉耦合项标定曲线Fig.6 Cross-coupling coefficient of i&p calibration curves
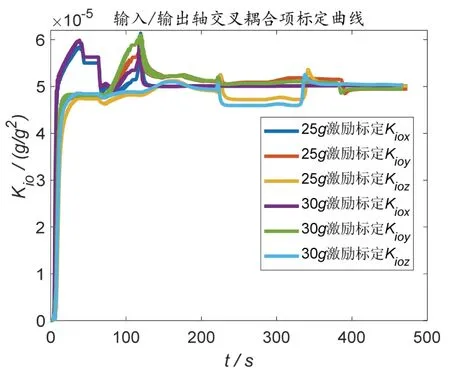
图7 输入/输出轴交叉耦合项标定曲线Fig.7 Cross-coupling coefficient of i&o calibration curves
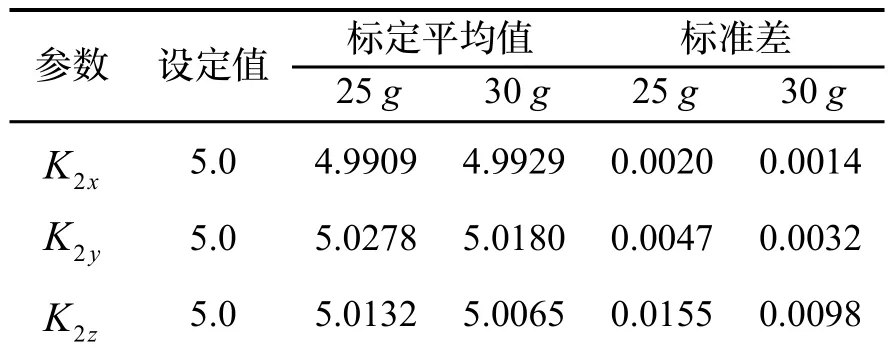
表1 标定仿真结果Tab.1 Simulation of calibration results
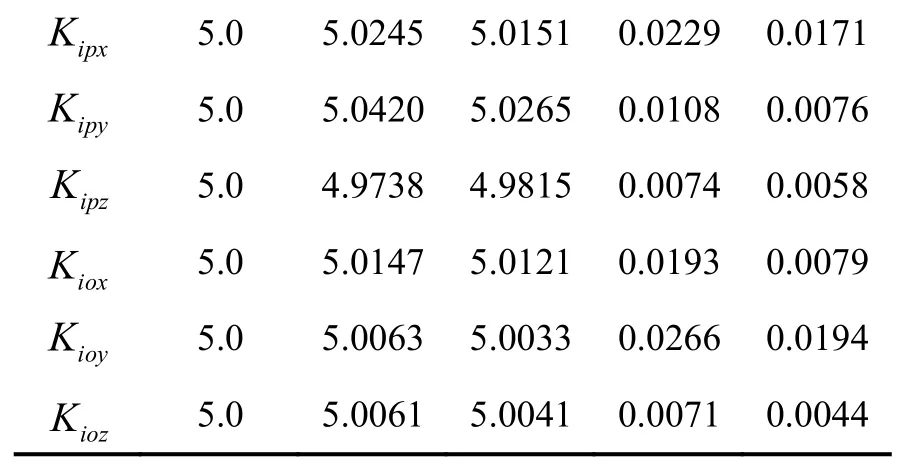
注:表内所有值×10-5g/g2
5 结论
为提高大过载高动态环境下捷联惯导系统石英加计的使用精度,需要对石英加计线性误差参数及非线性误差参数进行精确标定。本文在石英加计线性误差参数已准确标定的基础上,结合双轴精密离心机特性,提出了一种基于双轴精密离心机与捷联惯导转位机构交替转动、依靠捷联惯导转位机构实现9 位置标定路径翻转的石英加计非线性误差参数免拆卸高精度系统级标定方法。该方法减小了角速度测量精度对捷联惯导石英加计非线性误差参数系统级标定的影响,并且充分利用导航信息,采用卡尔曼滤波器“预测+修正”的方法将石英加计的非线性误差参数估计出来,不仅能保证精度,且实现简单、标定时间较短、抗干扰能力强,对于石英加计非线性误差参数标定具有一定的参考价值。