基于倾斜摄影技术的沥青路面纹理的实时识别系统
2023-02-11李秋实姚茂连朱齐
李秋实,姚茂连,朱齐
(东北林业大学 土木工程学院,哈尔滨 150040)
0 引言
随着我国经济的高速发展,伴随而来的交通事故也愈加频发,除去驾驶技术、车辆质量等不利因素,其中更重要的原因是沥青路面抗滑性不足所致,良好的路面抗滑性能为高速运转的车轮提供充足的滚动摩擦力,充分保障车辆在行驶过程中的安全性与稳定性。黄晓明等[1]研究表明,沥青路面的形态构造是影响道路抗滑性能的最主要因素,特别是在高寒地区的雨雪天气下,合理的沥青路面纹理能够最大限度地减少路面积水量与雪融量,降低沥青路面的水膜与冰膜厚度[2-3],增加沥青路面的附着系数与地面制动力,降低因车轮打滑、侧移而发生交通事故的概率。因此,对于服务期内的沥青路面表面纹理进行实地监测,获取表面纹理参数,对科学合理地评估路面抗滑性具有不可替代的作用。
目前,采集沥青路面纹理的方法主要分为2大类[4],一种是检测设备直接与路面定点接触获取相关数据的接触式测量,另一种是通过采集路面样本后进行路面表面纹理三维模型的重构或高程信息的提取,经过数字化处理过程的非接触式测量方式[5]。例如:手工铺砂法、摆式仪法、流出仪法等定点接触式测量,三者均是读取相关仪器数值,进行构造深度、摩擦系数等参数计算间接评估路面纹理,严重依赖测试者抗干扰能力、个人经验和技能水平,测试效率低,在单一的评价指标下,只能在一定程度上反映路面构造特征。因此,接触式测量方法均无法精确地获得,因集料自身表面的凹凸构造所致的微观纹理和因粗集料的间距、级配、形状、尺寸导致的宏观纹理数字化信息。
鉴于以上研究现状,王端宜等[6]采取工业CT技术扫描沥青道路钻芯,获得芯样侧视剖面图,通过Image Pro图像软件提取芯样表面轮廓线,进行沥青路面纹理参数的建立,进而评估路面的抗滑性能,但工业CT扫描法会受到只能在室内、提前制备试块与钻芯等诸多限制。Ding等[7]和Du等[8]采用三维激光测量法对干燥沥青路面进行扫描,获取扫描区干燥沥青路面数字化高程纹理数据,采取数字化图像处理技术实现路面纹理的三维图像重建与分割,但激光检测设备十分高昂且不适用于湿滑路面的检测。 陈嘉颖等[9]提出基于三相机的近景摄影测量技术,联合Matlab和Python创建自动识别近景摄影测量系统,获取沥青表面高程和纹理参数,但三相机的运用在光照因素条件下可能造成微观纹理、深纹理被宏观纹理所遮挡[10],面临上述因素的限制,使得目前较为成熟的技术应用范围大大缩小。倾斜摄影技术以高效性、真实性给传统测量技术带来了冲击,该技术通过从1个垂直方向、4个倾斜方向,在5个不同的视角同步收集影像[11-12],但将倾斜摄影技术应用到路面纹理识别中还未发现相关研究,故此,本研究提出基于倾斜式摄影测量方法,搭建倾斜摄影外业采集平台,创建内业三维模型和提取模块高程数据3部分组成的实时识别系统,实地对监测区沥青路面纹理构造信息进行采集,提高传统建模水平和纹理识别精度,通过对构造深度和凹凸比等评价指标进行分析,解决只能在室内、定点测量分析的弊端。科学、合理地对服务周期内沥青路面磨耗情况和抗滑性能进行评估,为道路评价、管理监测、道路养护提供精确性、实地性的抗滑数据奠定基础。
1 沥青路面纹理实时识别系统
倾斜摄影技术包括内业和外业2个过程,外业主要是进行数据采集,内业是进行数据处理,包括实景三维模型重建和数据获取。
1.1 倾斜摄影测量基本原理
倾斜摄影技术是在全球测绘领域中近些年逐渐蓬勃发展起来的一门技术,它打破了以往对正射影像仅仅在垂直视角进行采集数据的限制[13-14],倾斜摄影测量技术利用同一台无人机上同时携带着五镜头相机,在垂直、倾斜等方向采集图像数据,以获取更全面精确的影像数据和位置信息[15-17],如图1所示。为了获得丰富的纹理信息和被测物体的整体形貌,通常将相机倾斜角度设置在50°左右。将倾斜摄影技术应用到路面构造信息的获取和处理,相比于前面所提到的非接触测量,可在成本和实时性以及精准性方面彰显优势。
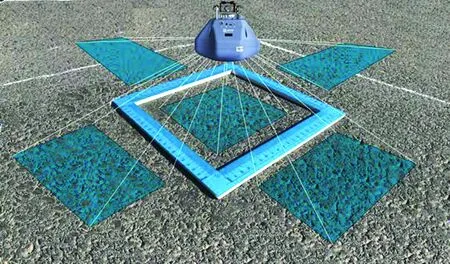
图1 倾斜摄影测量示意图Fig.1 Schematic diagram of oblique photography
1.2 系统构建
为了保证倾斜摄影技术的高效性、真实性、模型重构的精度,减少传统倾斜摄影技术的数据采集量和处理设备的要求,提高倾斜摄影技术在小范围区域采集的信息数据完整性,构建了适用于沥青路面纹理实时识别系统,该系统流程如图2所示,包括倾斜摄影外业采集平台、内业实景三维模型重建和数据提取模块。
1.2.1 外业数据采集平台
外业数据采集平台包括一台倾斜相机、GPS-中海达Qstar8和尺寸板。相机采用中海达倾斜摄影相机T5pro,中海达倾斜相机镜头焦距为下视25 mm、侧视35 mm,倾角设置为45°。焦距较长的相机,视场角小,可以获取更多的影像纹理,参数详见表1。
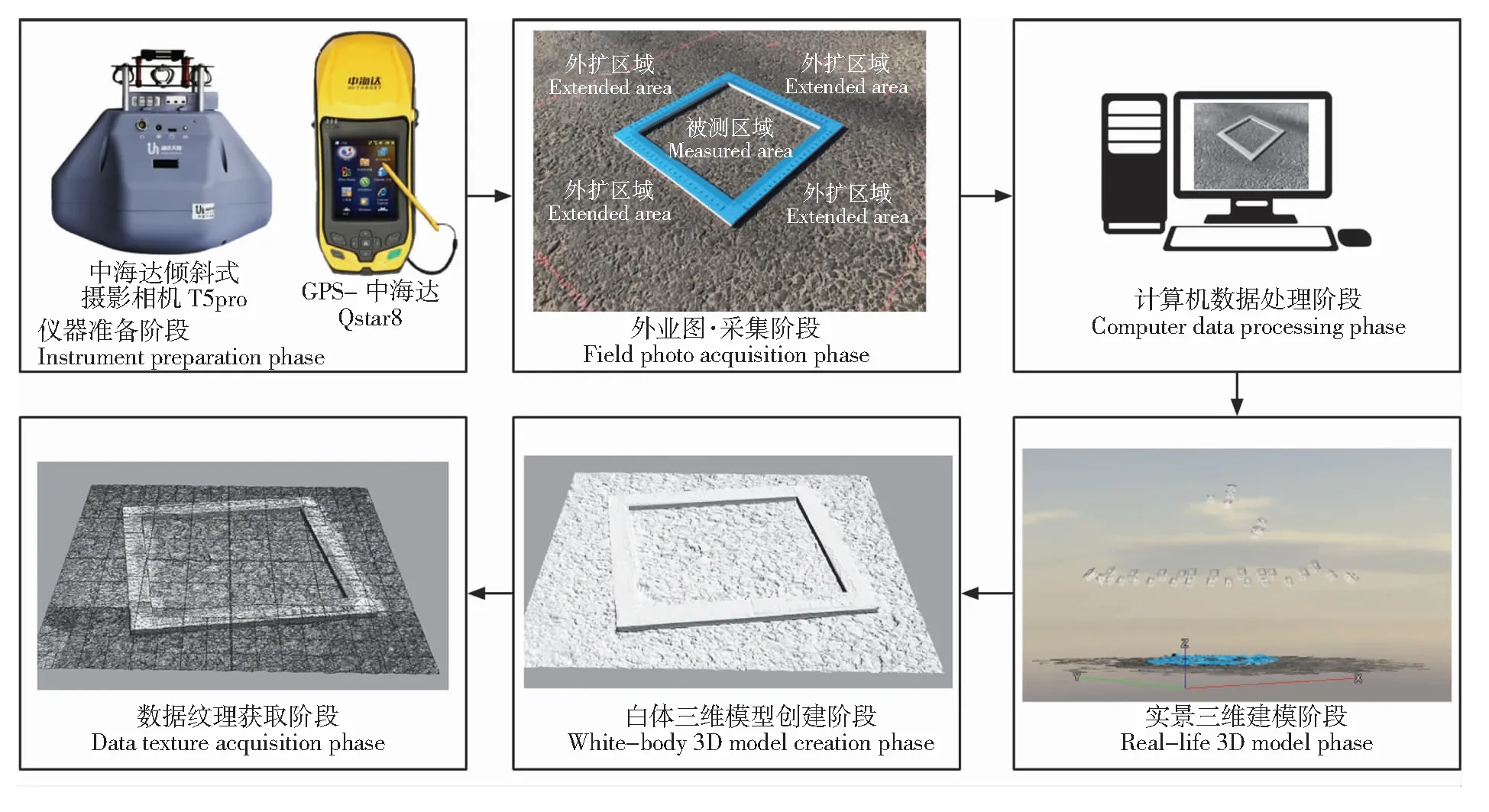
图2 倾斜摄影流程Fig.2 Flowchart of oblique photography
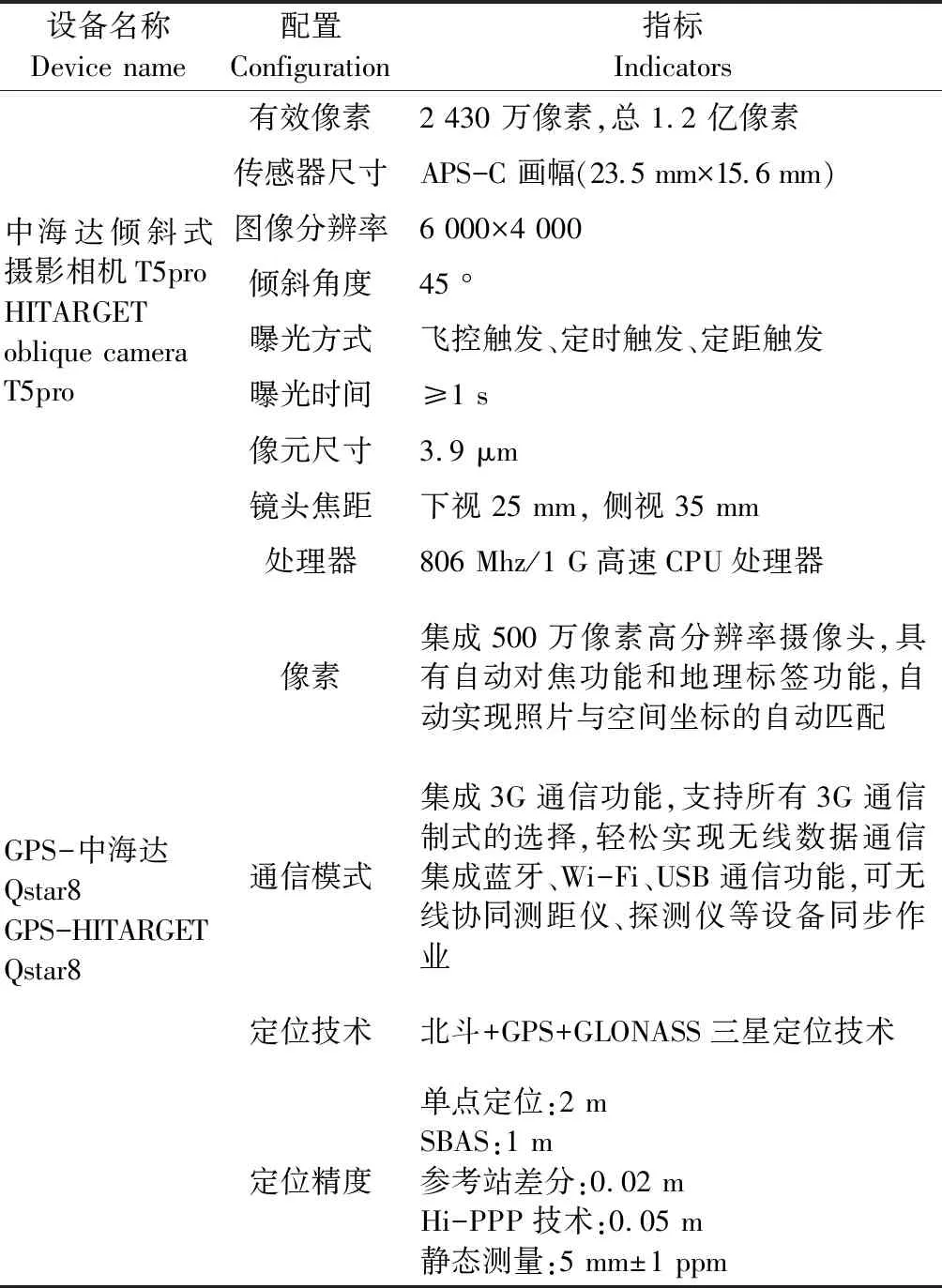
表1 设备技术指标
为了便于后期连接点的控制和比例的调整,在进行路面拍摄时采用自制的尺寸板,尺寸板的规格为20 cm×20 cm×0.05 cm,并在尺寸板上了标注了4个连接点和刻度,由于是小范围区域采集,倾斜相机不采用无人机进行搭载。在目标区域为20 cm×20 cm,拍摄距离为20 cm,拍摄角度为45°,拍摄高度为20 cm,因此进行手持倾斜摄影拍摄,外接GPS定位,同时GPS保证系统的准确性,需要控制和消除由于数字积累误差造成的远距离几何失真,地理参照系至少建立3个控制点以上,更多数量且分布均匀的控制点可以消除远距离几何失真。为此在拍摄区域内引入4个控制点,且控制点距离相等,均匀分布在尺寸板的4个角,且控制点在尺寸板已进行序号编制。
1.2.2 实景内业三维模型重建
采用CC处理软件进行三维模型重建,首先进行数据导入,主要包括处理航摄相片和相片所带的位置信息。按照相片导入的流程要求,主要是进行格式、对比度、曝光、色彩、白平衡和降噪等方面的调整。先对拍摄的道路图片进行调整,生成拍摄区域的遥感图像。设置4个连接点,依次将每张照片尺寸板上的控制点连接起来,并输入每个控制点的位置信息,将照片的姿态信息推算出来,通过计算每个图片与图片之间的连接点,并构建连接点与连接线,进而确定每一个像素点的所在位置,同时构建多视影像区域联合平差方程(1)—(5)来进行图片精确度的保证[18]。

(1)
(2)

(3)

(4)
(5)
再通过空三加密找到每个像素点之间特征点,经过特征点检测和描述进行匹配特征,采用SIFT进行特征点匹配,构建尺度空间,比较尺度空间极值点在DOG尺度空间本层以及邻近的上下2层的26个领域中是最大值还是最小值,检测极值点的位置及其空间坐标。精确定位关键点,确定关键点的主方向以及特征点描述符计算,计算关键点的领域范围,通过旋转坐标轴,生成128维的关键点描述子。然后根据公式(6)进行归一化处理得到具有对光照不变性的特征描述符。
(6)
式中:r为区域大小的半径,其结果取整数;d表示将关键点邻域划分为d×d的子区域,通常d取4;σoct特征点所对应高斯图像的尺度因子。
在SIFT 算法中,采用欧式距离作为匹配测度,通过构建 K-D 树数据结构完成待匹配特征集的搜索,满足相似性度量准则的即为粗匹配点,然后采用随机采样一致性算法RANSAC来剔除错误匹配。然后采用SIFT算法进行密集匹配和特征点的获取来得到高密度点云,再将其构成TIN三角网,从而形成了高清晰度以及高精确的数字表面模型[19-20],当在获取该三维模型的正射影像数据后,再对其采取滤波加工,并且与具有差异的匹配单元相互融合,从而最终构成了数字表面模型,从模型中可以看出路面纹理构造特征以及波动特征。具体流程如图3所示。

图3 图像三维指标获取流程Fig.3 Flow chart of image 3D index acquisition
2 试验
2.1 纹理数据获取
选取黑龙江省哈尔滨市东北林业大学校园内3条道路进行测试,第1条道路为成栋路(通车时间为1 a),第2条为校园西路(通车时间为2 a),第3条道路为马家沟沿路(通车时间大于 2 a)。3个试验路段各选取5个测点进行倾斜摄影技术、铺砂法采集路面纹理信息,如图4所示,每个测点相距50 m。采用中海达倾斜摄影相机T5pro, 具体参数见表1。根据上文建模精度要求,拍摄距离为20 cm,拍摄角度为45°,拍摄高度为20 cm,在保证重叠度的情况下,沿着尺寸板进行移动拍摄,每个测点平均拍摄80~90张照片。采用倾斜摄影技术来获取路面构造特征和纹理指标,首先输入图像与之相关的属性信息,这些信息包括倾斜相机设备的参数,如传感器尺寸、焦距、主点、透镜畸变以及POS位置信息文件[21],然后提交空中三角运算,区块运算,再进行重建和生产任务,生产任务结束以后生成一个具有地里位置信息、纹理高程坐标的三维点云的模型,根据三维点云模型提取纹理信息进行抗滑性评价。

图4 现场试验Fig.4 Field test
2.2 纹理数据指标选取
将具有地理位置信息、纹理高程坐标的三维点云的模型点云数据导入处理软Matlab中,提取沥青路面纹理点云的空间三维坐标,通过公式(7)和公式(8)计算被测点范围纹理点云坐标内空隙的平均深度(MTD,公式中用MTD表示);通过公式(9)计算被测点已经确定好平均构造深度范围内,沥青路面凸的构造占总构造体积之比-凹凸比。最后将获取纹理数据MTD、凹凸比与实测数据进行对比分析沥青路面的抗滑性能;其中平均构造深度表示在被测点范围内沥青路面路表空隙的平均深度,可用于评价沥青路面的抗滑以及排水性能。凹凸比表示在被测点已经确定好平均构造深度范围内,沥青路面凸的构造占总构造体积之比,可用于表示沥青路面的抗滑性能、粗糙度和磨耗程度。
(7)
(8)
(9)
式中:G0为被测区域路面的空间平面;G(x,y) 为被测路面高程点所围成的平面;S为积分区域;V为路表面与平面G0间所围体积,mm3;A是区域S的面积,mm2。
3 方法验证
3.1 倾斜摄影测量结果准确性和有效性分析
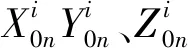
将铺砂法所获取的构造深度、摆式仪所获取的摆值与倾斜摄影技术处理的构造深度、凹凸比结果见表2。由表2可以看出,以铺砂法获取的构造深度为基准值,倾斜摄影MTD处理与之相对误差均小于±5%,每个路段测点的平均相对误差为0.05%、-0.022%、-0.094%,因此可认为倾斜摄影技术对路面进行数字处理纹理构造信息精度接近于0.01 mm。
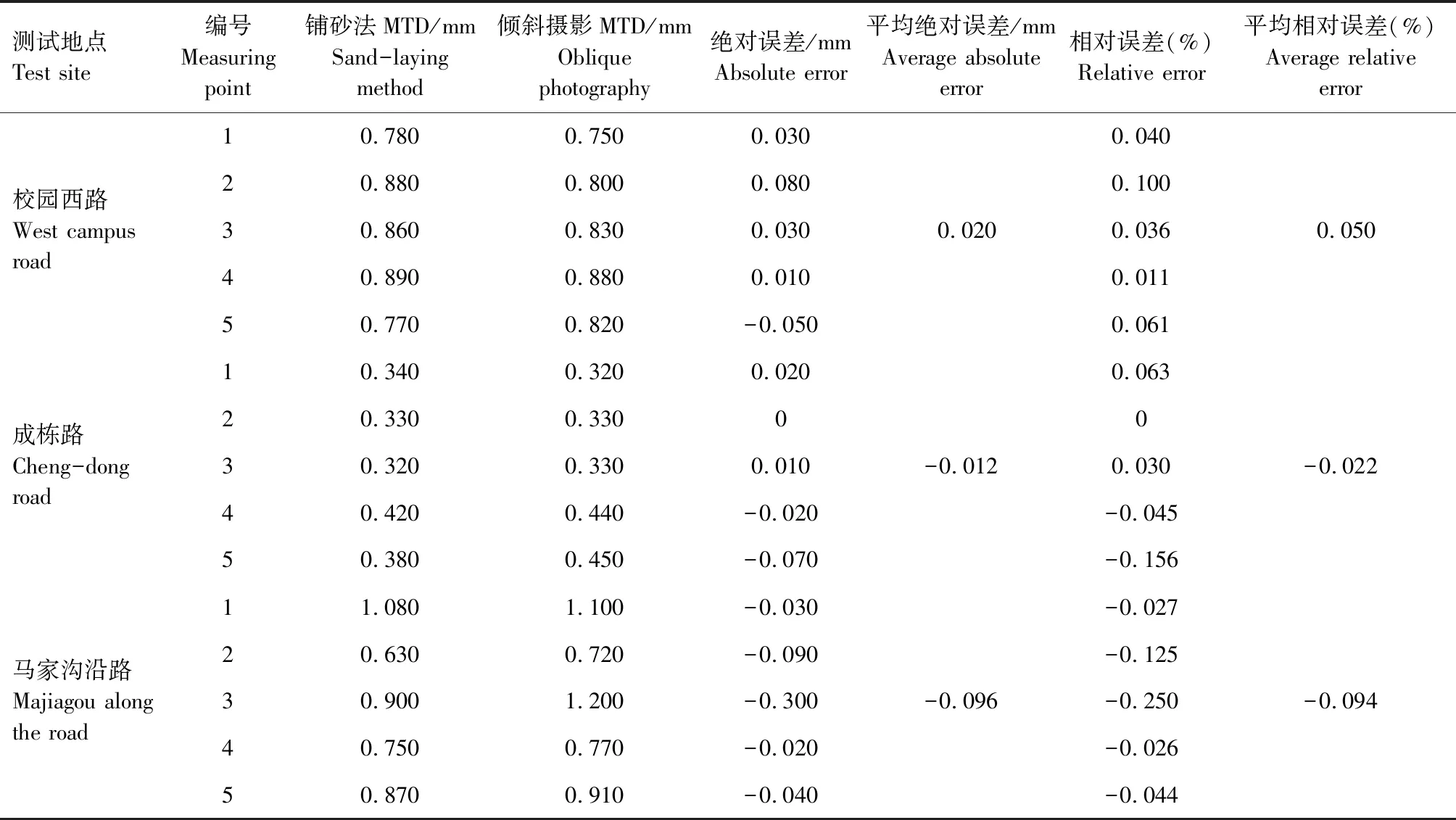
表2 沥青路面摆值与纹理指标统计
对3段路的铺砂法MTD和倾斜摄影MTD一起进行相关性分析,结果如图5所示。由图5可知,倾斜摄影MTD和铺砂法MTD之间的相关系数值为0.997 7,两者之间有着显著的正相关关系,验证了倾斜摄影技术用于路面模型的三维重建的有效性和构造深度数值的准确性。
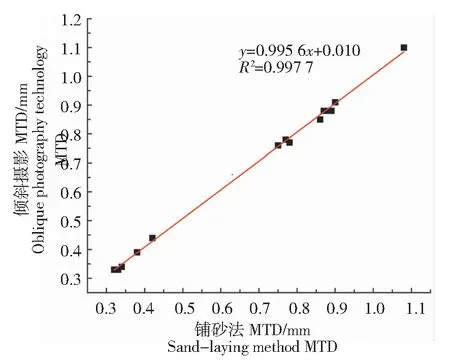
图5 斜摄影MTD和铺砂法MTD相关性对比Fig.5 Correlation between MTD of oblique photography and sand-laying method
3.2 三维纹理参数与抗滑性能相关性分析
无论是将数字化提取的纹理表面积还是均方粗糙度作为路面使用寿命期间的摩擦指标,当接触面积变化时,轮胎与路面之间的摩擦力也会发生变化,但实质上从新铺筑的路面到失去路面功能,实质上是路面凹凸构造体积随着车辆、环境的作用下发生的变化导致轮胎与路面的接触面积变化,是两者共同导致抗滑发生变化。对构造深度和凹凸比进行相关性分析,结果如图6所示,两者存在负线性关系,R2=0.814 4,说明凹凸体积之比会随着构造深度的增大而减小,与丁石海在接触纹理表面积会随着构造深度的增加而增加结论符合,这是因为凸出的体积占比减少,使得轮胎与路面接触的纹理面积增加,说明了凹凸比抗滑指标的科学性,其值变化会引起抗滑性能的变化,对不同路段校园西路、成栋路、马家沟沿路沥青路面的摆值与倾斜摄影所获的三维纹理参数MTD和凹凸比进行分析。结果如图7和图8所示。由图7可知,随着沥青路面使用年限的增加,摆值与构造深度呈正相关,图8中各路段凹凸比与摆值呈负相关。凹凸体积之比随着路面磨耗变小,凸出的体积占比减少,构造深度增大,前文中提到接触纹理表面积会随着构造深度的增加而增加,轮胎与路面接触的纹理面积增加,故摆值增高。图8中凹凸比的变化可以实时地反映路面在不同的阶段磨耗,在新建的路面(成栋路)凹凸比值在1左右,随着车辆行驶过程中对路面的反复磨耗和多变的环境因素共同作用下,第2年(校园西路)凹凸比开始下降在0.5左右,第3年(马家沟沿路)的时候路面的磨耗情况较第2年变化幅度不大,路面磨耗趋于稳定。
图6 各路段测点凹凸比与倾斜摄影MTD相关性对比Fig.6 Correlation between concave convex ratio and MTDof oblique photography at each road section
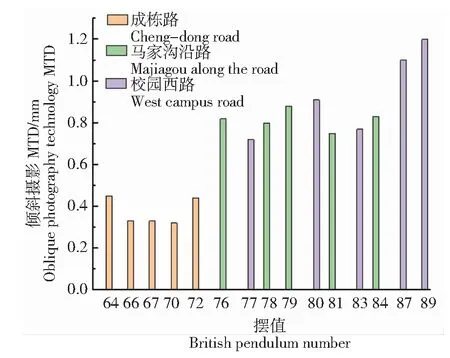
图7 各路段摆值与倾斜摄影MTD关系Fig.7 MTD of pendulum value and oblique photography of each road section

图8 各路段摆值与凹凸比关系Fig.8 Pendulum value and concave convex ratio of each section
4 结论
(1)利用倾斜摄影技术采集高精度路面纹理数据和数字图像处理技术实现三维纹理图像的重建以及三维纹理图像的构造深度、凹凸性的获取。研究结果表明,倾斜摄影技术和数字图像处理技术有助于路面纹理特征的分析,实现路表纹理数据的不丢失以及实时获取路面抗滑性能的反馈,建议采用倾斜摄影技术对路面防滑性能进行智能评价。
(2)路面的防滑性能与路面纹理密切相关。利用倾斜摄影技术通过对不同年限道路获取的数据分析发现,倾斜摄影MTD和铺砂法的构造深度关联程度非常高,纹理凹凸性、构造深度对路面抗滑性能有影响,其次凹凸比的变化可以实时地反映路面在不同的阶段磨耗情况,综合分析这几段路的实测结果,凹凸比值在0.5左右,沥青路面磨耗趋于稳定。
(3)采用倾斜摄影将室内采集试件转移到室外道路实地采集,通过实景三维建模实时获取不同服役期间、不同路段的路表抗滑信息并将获取的数据进行不同路段的横向比较和不同时间的纵向比较,解决传统非接触测量方法在空间上的限制,但此技术在数据采集时容易受到光照的影响,特别是遇到阴天等光照条件不足时的天气状况采集的图片会减低系统识别精度,未来应重点解决光照因素所带来的精度问题。