一种智能鞋底清洁机的设计研究
2023-02-11钱伟龙QIANWeilong张治军ZHANGZhijun鲍蓉BAORong
钱伟龙 QIAN Wei-long;张治军 ZHANG Zhi-jun;鲍蓉 BAO Rong
(兰州石化职业技术大学,兰州 730060)
0 引言
随着人们对生活水平的不断提高,对生活中居住环境也有较高的要求,人们希望自己的居家环境更方便、更健康、更整洁。而鞋底是人们经常接触污垢的最直接部位。不论是流行病、有害物质或影响环境的污染物,它们很容易粘在鞋底上。随着人体的运动,鞋底已成为有害物质最重要的载体,不断地从一个环境迁移到另一个环境,如何堵住鞋底下的“偷渡者”。
疫情在世界各地肆虐,消毒、清洁和戴口罩已成为控制疫情传播的有力措施。后疫情时代,对进入室内人员鞋底进行清洗消毒成为一种常态,确保进入室内人员鞋底干净卫生,成为一种现实需求。因此,设计一种操作方便、结构简单、成本低、适用于各种场所,能够快速彻底地去除鞋底污垢并对鞋底进行消毒的智能鞋底清洗机是必要的,满足时代的需要,市场潜力巨大。
1 总体设计方案
本文针对智能清洁机主要从电气、机械、显示方案等方面进行了设计研究,电气我们采用了最简单的驱动方式,用传感器、电机等组成。通过传感技术和控制电机的转动,利用红外线物理性质来进行测量的传感器。接下来是机械部分,机械有两部分组成,清洗装置和烘干装置,这是清洗装置外形,这是烘干装置外形,清洗装置和烘干装置同为方形结构,方便我们的拼接。清洗装置的上面是一个踩踏板,通过传动轴的转动达到清洁,下面是由蓄水盒和控制器组成,这个蓄水盒里面我们可以稀释消毒液达到杀菌消毒作用,采用最传统的消毒方式,对水进行过滤重复使用,更加环保。烘干装置用于烘干鞋底和本身清理,结构简洁可靠,可长时间循环使用,节省大量能源。
鞋底清洗消毒装置是以机械控制为主,电器结构为辅。利用传感技术,实现机电结合。鞋底清洗消毒装置是通过感应装置是否感应到可执行的信息。如果检测到信息电机开始工作。共同完成清洗消毒工作。电气部分由传感器、电机等组成。
2 机械部分设计
机械部分的设计是智能鞋底清洁机的关键所在,关系到机器的操作、结构及成本;本文设计的机械部分主要包括x轴方向的可以实现同步运行的传送带,和传送带相连接的清洗硬刷轮,以及固定支撑座上安装的温度传感器,如图1所示。当人们将脚放在智能鞋底清洁机上时,传感器检测到信号,控制程序启动,电机带动传送带开始同步运行。传送带的运行带动清洗轮毛刷同步旋转,毛刷与鞋底接触,对鞋底表面进行清洁。考虑到在长时间使用后,传送带疲劳后清洁效率会降低,因此在输送带底部设置了一个自动可调张紧轮,可对传送带松紧进行调整。
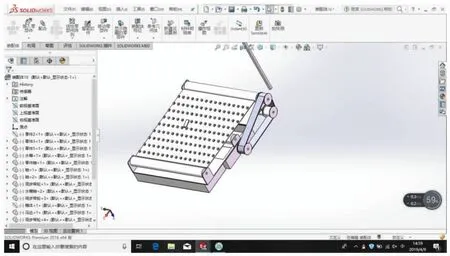
图1 鞋底清洁机结构框图示意图
3 电气部分设计
电气部分的设计采用红外检测方式,我们将红外线发射管、红外线接收管安装在机器入口两侧,通过调试,使红外线发射管发出的红外线可以被红外线接收管接收,红外线发射管和红外线接收管连接在控制电路上,控制电路采用最简单的Arduino驱动方式,如图2所示。主要由传感器,电机等组成,通过传感技术控制电机的运行。
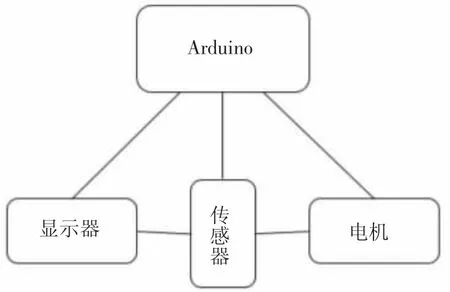
图2 控制电路驱动方式
3.1 红外线传感器的启动和应用
红外传感器是利用红外线的物理特性进行测量的传感器,在测量过程中不直接与被测物体接触,具有灵敏度高、响应快的优点。
该红外传感器主要由光学系统、检测元件和转换电路组成。其中光学系统根据结构的不同,可分为透射型和反射型两种。检测原件根据工作原理的不同,可分为热检测元件和光电检测元件两种;热敏电阻是应用最广泛的热检测元件,当热敏电阻被红外线照射时,温度升高,电阻迅速发生变化,并通过转换电路转换为电信号输出。光敏元件通常被用作光电检测元件,对光线非常敏感,当没有光照射时,光敏电阻呈高阻状态;当有光照射时,光敏电阻的电阻值迅速减小,并通过转换电路转换为电信号输出。
本文中智能鞋底清洁机正是利用红外线传感器控制触发整个装置的开关,如果有人时整个装置运行,在一定的时间内将鞋底清洗消毒,然后停止一段时间,等待人离开,再次判断是否有信号输入。
3.2 红外线控制原理
本智能清洁机采用光敏红外传感器来实现信号的检测,利用红外发射管发射红外线,其发射红外线的强度可以通过改变电流的大小实现,随电流增大而增强。发出的红外线被红外接收管(属于光敏二极管)接收,它的内部有一个对红外线敏感的PN节,只对红外线有反应,无红外光时,光敏管不导通。接收到红外线的红外接收管,光敏管导通形成光电流,光电流大小随着红外线强度增强在一定范围内增大。本文正是利用了这一点把红外技术应用到智能鞋底清洁机的实际开发中。如图3、图4所示,红外线传感器分为发射和接收两部分。
从图3、图4中可以看出,红外发射电路和红外接收电路连接到单片机的IO端口,其工作原理如下。红外发射电路:当电路接入高电平时,三极管Q1不导通,故此红外发射管D1不发射红外线;当电路接入低电平时,三极管Q1导通,从而使红外发射管D1发出红外线。红外接收电路:通过调整电位器R4给HS0038的1脚提供一个阈值电压,电压大小可以根据实际情况来确定。红外光敏二极管C2接收到红外线时,电路中会产生电流,电流大小会随着红外线的强弱而变化,红外线由弱变强时,电流由小变大。当没有红外线或红外线很弱时,没有电流产生,此时引脚3的电压接近VCC,其电压值高于引脚2的电压,通过HS0038比较后,接收检测引脚输出一个高电平。当随着红外线强度增强时,电流也会变大,此时引脚3的电压值等于VCC-I*R3,电压就会越来越小,当引脚3的电压比引脚2的电压还小时,接收检测引脚就会输出低电平。该电路用于智能鞋底清洁机时,当没有人站在智能清洁机上时,红外发射管发送红外信号,红外接收电路接收的红外线比较强,此时接收检测引脚输出低电平,智能清洁机处于停止状态。当有人站在智能清洁机上时,红外发射管发送红外信号,由于红外信号被遮挡,因此接收电路光敏二极管C2接收不到红外信号,接收检测引脚输出高电平,此时通过电机控制智能清洁机的运行,对鞋底进行清洁消毒。

图3 红外发射电路
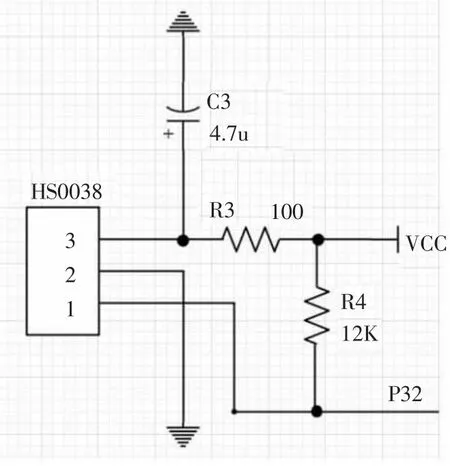
图4 红外接收电路
3.3 红外线和开发板的组装原理
我们可以很容易的使用Arduino连接PIR运动传感器,像其他的传感器一样。但是这一切都取决于我们的代码逻辑,我们想要通过它如何有效的来检测运动。和其他的传感器一样,PIR有3个引脚,VCC、信号和地。图5展示了一个非常简单的使用Arduino连接PIR运动传感器的电路。
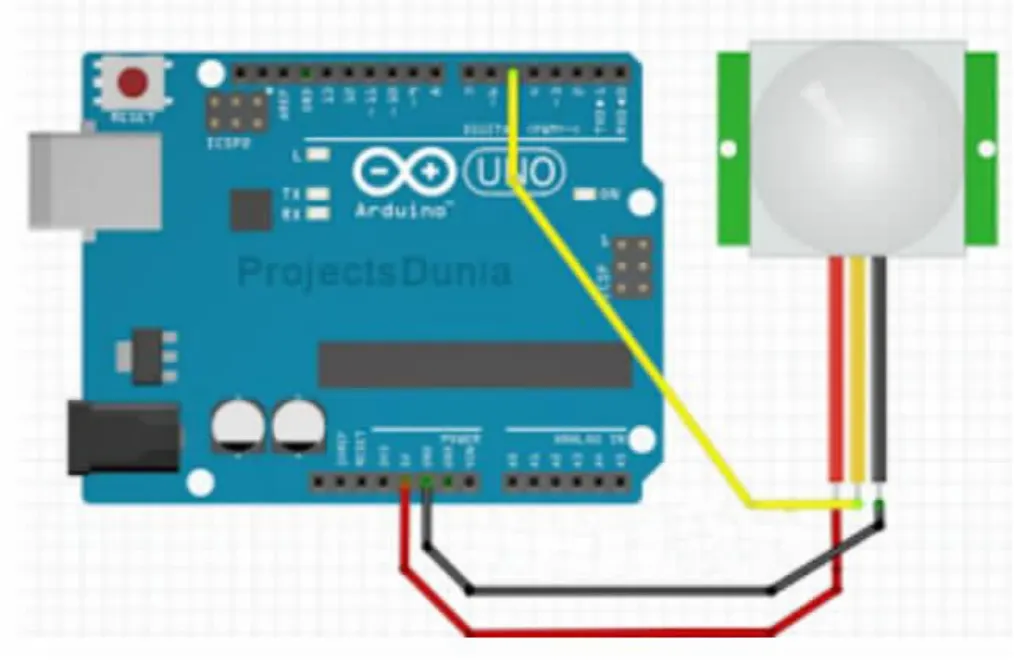
图5 传感器电路图
PIR传感器还有2个旋钮。一个用于通过增大或减小运动检测的范围来调整灵敏度,另一个用于调整响应延迟的灵敏度。
3.4 L298驱动芯片
本文中电路设计驱动使用的是L298驱动芯片,该芯片的主要特点是:具有两个h桥的高压大电流全桥驱动器可用于驱动感应负载;采用标准TTL逻辑电平信号控制;工作电压高,最大工作电压可以达到46V;有两个启用控制终端,允许或禁止设备在不受输入信号影响的情况下工作;有一个逻辑功率输入,使内部逻辑电路在低电压下工作;输出电流大,瞬时峰值电流可达3a,连续工作电流为1.5a;它可以外部连接以检测电阻并将变化反馈给控制电路。(图6)

图6 L298驱动芯片
4 显示屏部分
为了保证系统的正常运行,有必要实时监控系统的运行状态,为了便于查看系统状态,本设计中设置了一个监测和指示装置,该装置由控制智能清洗机启动和停止的接触器的常开或常闭触点以及检测故障的继电器控制。电路图如图7所示。
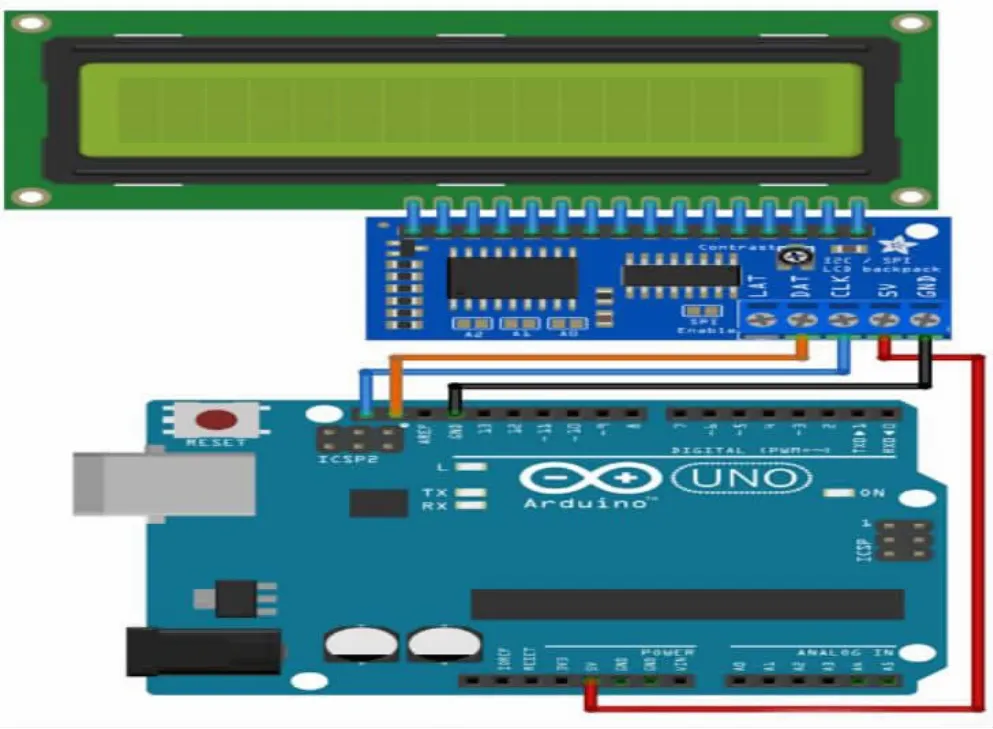
图7 显示电路
当人们需要清洁鞋底将脚放在传送带上时,红外传感器检测到信号,由控制装置启动智能鞋底清洁机开始运行,控制回路中继电器得电,从而控制常开触点接通,触点一侧的发光二极管点亮,指示智能鞋底清洁机处于运行状态。当人们将脚离开传送带上,红外传感器检测到的信号发生变化,智能鞋底清洁机停止运行,信号被发送到主控室的单片机,单片机接收到低电平信号并立即响应,触电一侧的另一发光二极管点亮,指示智能鞋底清洁机处于停止状态。
5 特色与创新之处
①它适合于任何的场合,智能清洁机采用模块化设计,可根据场地进行调整安装。
②高效智能,结构简洁,作品机械设计简洁可靠,体积小巧。
③通过机械产品清洗消毒鞋底,使无尘车间等戴鞋套的地方杜绝了一次性塑料鞋套的使用,减少污染。
④智能清洁消毒机主要是利用传感技术,对是否有人进行此操作进行判断,不需人去开关,自动化控制系统为人们提供便捷。
6 结束语
该产品的设计将有助于减轻人们拖地和消毒地板的麻烦。只需往上面一站,不考虑任何因素的继续向前通行,鞋底即干干净净,比换鞋套省钱,也避免了二次污染,一举足而皆大欢。它不仅适用于大型商场、无尘车间、家庭,也适用于办公室、实验室和实验室。此外,本产品还具有鞋底消毒功能,适用于医院、食品厂、制药厂、农场等特殊场所。该产品设计合理,制造美观,技术先进,使用方便,简单大方,占地面积小,为家庭和办公提供了一个清新的环境。
