基于两阶段卡尔曼滤波的四旋翼无人机自主预测维护
2023-02-09申富媛蒋栋年毛海杰
申富媛,李 炜,蒋栋年,毛海杰
(兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;兰州理工大学甘肃省工业过程先进控制重点实验室,甘肃兰州 730050)
1 引言
四旋翼无人机是一种具有非线性、强耦合等特性的典型欠驱动控制系统,在军事和民用领域都有着广泛的使用[1-2].应用领域的不断扩大和应用环境的日益复杂,使无人机飞行频次和运行时间骤增,因此,老化、磨损及疲劳等引起的元部件退化不可避免.这必然会导致无人机性能下降,引发安全性问题,轻者致使任务无法完成,重者甚至造成不可预估的人员和经济损失.
从无人机部件角度来看,造成机体性能下降的原因主要包括: 推力器、反作用轮、动量轮、控制力矩陀螺、推进系统及陀螺仪等故障,文献[3]指出无人机执行器各组件发生故障的几率占到了总故障率的44%.四旋翼无人机机体性能退化虽不同于执行器退化,但却与此密切相关.执行器退化对于无人机机体性能呈现隐含退化的特点,执行器轻度退化,负反馈即可补偿其对机体位置和姿态的影响,随着执行器退化的累积,若不及时进行在线预测性维护,机体性能势必会超出期望约束范围而进入失效状态.
目前,针对具有执行器退化的无人机在线自主维护策略,更多是以容错的方式来提升其可靠性[4-6],然而,容错控制属故障的“事后”维护处理方案,缺乏预见性.此外,四旋翼无人机控制任务通常具有较为严苛的时限性要求,因此,若能依据执行器退化状态预测机体剩余寿命(remaining useful life,RUL),及时进行预测性维护(predictive maintenance,PdM)[7],无疑对于降低无人机故障率、提高其安全性更有意义.
准确地预测无人机RUL是实现预测性维护的前提,现有RUL 预测方法主要包括: 失效机理分析方法[8]、数据驱动方法[9-10]和两者融合方法[11]等.其中,数据驱动的RUL 预测方法又可分为基于机器学习和基于统计数据两类方法.由于后一类方法以概率统计理论为基础,可将设备运行过程中的诸多不确定性考虑在内,很好的表征设备真实退化过程,成为当前寿命预测领域的主流方法.电机作为四旋翼无人机飞行的动力之源,由于长期运行会出现轴偏心变形、绝缘层退化、磁性退化等现象,导致实际输出呈现隐含非线性平稳退化特征.标准布朗运动驱动的Wiener过程能够更好地描述机械参数或电气参数发生缓慢变化的退化过程,因而成为电机退化建模的首选[12].因此,基于Wiener过程描述的执行器退化过程,实时监测退化数据并估计模型参数,依据首达失效阈值的时间求解RUL,可为考虑工作时限性和机体性能要求的四旋翼无人机PdM奠定基础.
对于具有多个执行器退化的四旋翼无人机,开展PdM研究须面对以下关键问题:一是实时退化数据的准确获取;二是无人机剩余寿命的科学定义与准确预测;三是自主维护策略的优化确定.研究寻求解决上述问题的方法与途径,正是本文的研究动机.
研究动机1: 由于噪声或扰动的作用,隐含的执行器真实退化值难以精确获得,文献[13]利用Kalman滤波技术,实时准确估计了具有测量不确定性的潜在退化状态.文献[14]提出了一种自适应卡尔曼滤波算法在线估计出执行器故障,解决了考虑执行器性能退化控制系统的故障检测问题.文献[15]基于权值优选粒子滤波算法,利用系统监测数据在线估计执行器的隐含退化量.然而,以上文献都是针对单一执行器退化的估计,无人机具有多个执行器.考虑到多执行器退化在系统工作过程中表现为控制效能损失的本征,以退化率描述其退化程度,将退化率作为系统未知偏差的一种,采用两阶段卡尔曼滤波(two-stage Kalman filter,TSKF)[16]同时估计状态和未知偏差,有望快速并准确获取多个执行器的真实退化状态.
研究动机2: 考虑执行器退化与系统性能之间的关系,文献[17-18]针对单输入单输出系统,选取稳态性能指标作为系统失效阈值,并基于首达时间给出了系统的剩余寿命分布.但此方法对于同时具有位置和姿态性能多性能要求的无人机系统已不再适用,而多项指标的引入又需规避量纲的影响.因此,本文拟采用基于马氏距离定义的系统健康度指标,更全面反应无人机健康状态,依据期望的健康度确定无人机失效阈值.对于多执行器退化的无人机系统,该失效阈值为综合退化量.由于每个执行器的退化程度不尽相同,求取综合退化量时,必须根据各执行器退化程度赋予不同的权重,以确保对无人机退化程度的准确估计.基于马氏距离的健康度和综合退化量的结合,有望更便捷地预测无人机剩余寿命.
研究动机3: 延寿控制(life extending control,LEC)作为自主维护的重要手段,为延长工作时限、提高系统安全性提供了途径.目前,LEC 采用的主要方法包括: 线性二次调节器[19](linear quadratic regulator,LQR)、模型预测控制[20](model predictive control,MPC)及强化学习[21](reinforcement learning,RL)等,MPC因对模型精度依赖度低、鲁棒性强,使用居多,然而权值矩阵多为固定值,且与系统健康状态的关联不足,因而延寿能力有限.若能依据无人机的剩余寿命,并依赖于其健康度反馈调节MPC权值矩阵,则可在机体健康感知的前提下,实现性能和状态之间的自适应调节,有效延长无人机使用寿命,保障机体和随机设备的安全.
综上,本文针对多执行器隐含退化的四旋翼无人机,开展的创新性研究工作主要有: 1)采用TSKF实时估计执行器退化率和无人机状态,并以熵权法给出了综合退化变量的新定义;2)引入马氏距离无人机健康度的概念,实时评价无人机健康状态,并据此确定无人机失效阈值;3)基于健康度实时修正MPC权值矩阵,延长工作时限,实现预测性自主维护.
论文各部分内容安排如下: 第1部分,建立具有多执行器退化的四旋翼无人机退化模型,构建自主预测维护体系;第2部分,进行四旋翼无人机执行器隐含退化描述并预测无人机剩余寿命;第3部分,基于健康度评价结果开展无人机自主维护;第4部分,仿真结果分析,验证文中方法的有效性.
2 多执行器退化下四旋翼无人机的模型建立与预测维护体系构建
2.1 退化模型建立
针对四旋翼无人机,利用牛顿-欧拉公式,考虑外部干扰,在混合坐标系下建模,如式(1)[4]所示:
其中:x,y,z是四旋翼无人机的实际位置;ϕ,θ,ψ分别表示滚转角、俯仰角和偏航角;fi(i=x,ϕ,θ,ψ)表示无人机受到的外界干扰,且满足fi≤Fi,Fi是正常数;m,g分别为机体总质量、重力加速度;Ixx,Iyy,Izz分别为无人机绕机体各轴的转动惯量;Uz,Uϕ,Uθ,Uψ表示控制输入,与电机输入ui之间的关系如式(2)所示;Uz用于x,y,z这3个方向的位置控制;Uϕ,Uθ,Uψ分别用于滚转、俯仰和偏航3个姿态的控制.
其中:ui(i=1,2,3,4)为第i个电机的脉宽调制(pulse width modulation,PWM)输入;Ld为四旋翼无人机电机到质心的距离;Ku是与螺旋桨产生的力相关的推力增益;Ky是与螺旋桨产生的扭矩相关的转矩增益.
假设四旋翼无人机处于无偏航(ψ=0)和小滚转角及俯仰角的悬停状态下,忽略阻力项、陀螺效应和科里奥利向心效应,式(1)简化为
式中: 矩阵A,B,C见文献[22];G的转置为
考虑执行器退化的四旋翼无人机线性化模型为
2.2 预测维护体系构建
无人机的PdM是指依据机体状态监测数据,基于实时RUL预测并进行自主维护.因此,如何使发生多执行器退化的四旋翼无人机系统具有PdM功能,需从自主预测维护体系的构建入手.基于前述PdM需解决的3个关键问题与解决途径,构建图1所示的四旋翼无人机自主预测维护体系架构.该系统包括: 四旋翼无人机机体、执行器、MPC及PdM等模块.其中PdM模块的核心功能有二: 一是在执行器退化时采用TSKF实时估计执行器退化状态,进而预测机体RUL;二是依据RUL判决无人机维护需求与时机,并给出维护策略,即当RUL不满足期望的工作时限要求时,借助于MPC增强对于u(t)的约束,进而减缓执行器退化,延长四旋翼无人机的有效使用时间实现自主维护.

图1 四旋翼无人机系统自主维护结构图Fig.1 Structure diagram of autonomous maintenance of quadrotor UAV
图1中:yd(t)为期望轨迹;y(t)为实际轨迹;e(t)为系统偏差;u(t)为施加在执行器上的控制作用.
3 四旋翼无人机的多执行器隐含退化描述与剩余寿命预测
3.1 多执行器隐含退化描述
无刷直流电机作为四旋翼无人机的执行器,其健康状态直接决定着无人机使用寿命.无人机每个执行器的退化可采用Wiener过程建模,借鉴文献[15],退化过程可描述为
其中: 对于第m个执行器,d(m)(0)表示执行器初始退化量,不失一般性令d(m)(0)=0;{B(m)(t),t≥0}表示标准布朗运动;µ(m)(t;θ(m))和σB(m)分别表示漂移系数和扩散系数;本文采用时间t的非线性函数表征模型的非线性.
将执行器退化作为系统未知偏差的一种,采用TSKF可以在估计系统状态和退化率的同时,尽量降低测量噪声的影响,从而获得更可靠的估计性能.
对式(5)进行离散化,得到
进一步有偏差增广离散线性时,变状态空间模型为
利用离散TSKF[16]得到执行器退化率和状态真值估计的最小方差解如下:
偏差估计为
无偏状态估计为
滤波器残差及其协方差为
耦合方程为
状态最优估计及其估计误差协方差矩阵为
据此估计的各时刻执行器隐含退化量,实时更新可得到更精确的无人机剩余寿命分布.
3.2 多执行器隐含退化下四旋翼无人机性能分析
四旋翼无人机4个旋翼上安装了相同参数的电机,在飞行过程中受线圈老化、磁性退化等因素影响,均会发生退化.同时由于空中干扰、异物等各种不确定因素,其退化过程亦有个体差异性,加之共同退化的耦合叠加效应,因此,多执行器退化与单一执行器退化对四旋翼无人机性能影响有着显著的区别.
对于四旋翼无人机,失效意味着机体性能不再满足要求,此时执行器还未达到自身的失效阈值.健康度作为衡量装备或系统健康程度的一个重要性能指标,其能够从整体上更全面地反映装备或系统的健康状况.因此,将四旋翼无人机的健康状态量化为实时健康度,用以度量四旋翼无人机在各个监测时刻的健康情况,便可依据健康度定义系统失效阈值.
其中Σ为协方差矩阵.
其中b为形状参数,且b>0.
考虑全生命周期,假设多个执行器具有不同退化过程,图2中曲线1,2,3,4给出其中的一种退化组合.图中HDn,HDsf分别表示无人机由正常工作状态进入退化状态的健康度和机体性能不满足要求时的健康度;ln,lsf,laf分别表示四旋翼无人机由正常工作进入退化的临界阈值,机体性能不满足要求的退化阈值和执行器失效的综合退化阈值;tn,tsf,taf则分别表示各退化阈值对应的时刻.对各执行器而言,退化程度大小不一,致使tn,tsf,taf变得不再确定.因此,需考虑各执行器退化程度对机体性能影响,以加权融合的方式得到综合退化量ds(t)(图2红色曲线所示).由此以来,使得在多执行器退化的情况下,以健康度HD作为约束预测机体剩余寿命变得更直接.
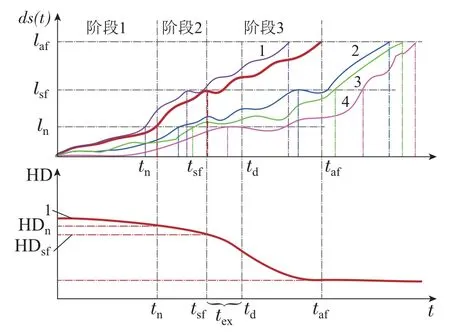
图2 基于健康度的执行器退化过程示意图Fig.2 Schematic diagram of the actuator degradation process based on health degree
基于机体HD定义的执行器综合退化表述如下:
阶段1HD∈(HDn,1],无人机满足工作性能需求,综合退化量ds(t)<ln,各执行器退化对无人机整体性能影响甚微.
阶段2HD∈[HDsf,HDn],无人机性能下降,综合退化量ds(t)∈[lsf,ln],预示着执行器退化程度逐渐加重,且导致无人机性能下降,剩余寿命可能不满足工作时限性要求.
阶段3HD∈[0,HDsf),无人机性能已不满足要求,综合退化量ds(t)>lsf,即使各执行器未失效,但四旋翼无人机健康度小于HDsf,此时系统失效.
3.3 多执行器隐含退化下四旋翼无人机剩余寿命预测
文献[22]针对单一执行器退化时的四旋翼无人机,定义不满足性能要求的执行器退化阈值为系统失效阈值,据此求解无人机RUL.然而,对于多执行器退化的四旋翼无人机,各执行器退化程度不一,因此,致使机体失效的执行器退化组合方式也变得复杂多样.但可以肯定的是机体失效是多个执行器退化共同作用.按上述思路求取无人机RUL,首先应将多个执行器退化变量转化为一个综合退化变量,再依据期望的机体性能指标,获取不满足性能的系统失效阈值,进而预测无人机RUL.
由于各执行器的退化程度对机体性能影响差异,计算综合退化量时不可将各个退化量等同对待,需依据退化过程赋予不同的权重.熵权法的基本思路是根据各退化变量退化程度的大小来确定客观权重.一般来说,若某个执行器退化量的信息熵越小,表明执行器退化的程度越大,提供的信息量就越多,在综合评价中所能起到的作用就越大,其权重也就越大.反之亦然.采用熵权法[24]计算综合退化量的步骤如下.
步骤1数据标准化.
令datakj=(d(m))′(k=1,···,n;j=1,···,m)表示m个执行器,n个样本,采用最小最大标准化方法,对各执行器退化数据标准化处理,即
步骤2退化量的信息熵.
步骤3退化量的权重.
通过信息熵计算各权重退化量,即
步骤4综合退化量.
无刷直流电机自身退化原来就呈随机特性,因此基于熵权法得到的综合退化量可采用式(6)Wiener过程建模.在连续两个检测时刻之间退化量的增量Δdsk=dsk+1-dsk服从正态分布,即Δdsk~令DS(tk)=dsk表示当前tk时刻的综合退化量,综合退化状态向量DS1:k=(ds1,ds2,···,dsk).
因此,对于模型未知参数θ=(α,β,σB),在退化数据DS1:k下,关于未知参数θ的对数似然函数为[15]
利用MATLAB仿真软件中的“fminsearch”函数实现对数似然函数(34)极大化,得到未知参数θ=(α,β,σB)的极大似然估计值
假设多执行器退化综合失效阈值为laf,根据首达阈值定义,则其对应的寿命分布为[13]
选择HDsf作为确定四旋翼无人机失效阈值的指标,定义失效阈值lsf为健康度小于期望的健康度HDsf时所对应的执行器综合退化量,则有
执行器隐含退化时四旋翼无人机的寿命是指机体正常工作至最低健康度要求时的寿命,故可将无人机寿命定义为
其中inf为下确界算子,则系统剩余寿命表示为
设当前tk时刻的综合退化变量为dsk,tlk为tk时刻预测得到的无人机剩余寿命时间,借鉴文献[13],并结合式(36)确定的系统综合退化阈值,四旋翼无人机控制系统的剩余寿命概率密度函数(probability density function,PDF)为
据此解析式可快速求取无人机RUL实时预测值.
4 基于四旋翼无人机健康度评价的MPC自主维护策略
4.1 基于MPC的自主维护机理
基于MPC模型预测、反馈校正和滚动优化的基本步骤,对模型(4)进行离散化,并设k时刻系统参考输入值为Yr(k),通过最小化性能指标J(k)获得使系统输出尽可能的接近输入的控制量ΔU(k),即
其中: 第1项反应无人机对参考轨迹的跟随能力;第2项是对控制量平稳变化的要求.为调整参数方便,将矩阵Q和R的对角元素分别选取为相同值,误差权重和控制量权重矩阵分别为r0为MPC初始值.
假设四旋翼无人机期望的安全工作时间为td,欲使其达到td,则应基于tk时刻RUL预测结果tlk,求取最短的期望延寿时间tex.当tex>0时,应对无人机进行自主维护.
通过减小Q放松误差性能指标约束,增大R减小执行器执行压力延缓退化,进而达到延长四旋翼无人机剩余寿命,实现自主维护.
可虑执行器物理属性,引入如下输入约束:
4.2 基于健康度的MPC自适应自主维护策略
通过前述分析可知,执行器退化与系统性能之间有着紧密的联系,退化较小时,由于反馈控制的作用,对系统性能影响较小,而退化变大时,系统性能会退化.由于基于马氏距离健康度的定义,综合考虑了执行器退化时对系统各状态的影响,能够更加全面的评价执行器退化对系统的影响.因此,在四旋翼无人机不满足工作时限性要求时,自主维护可依据健康度实时修正权值矩阵Q,R,使机体在稳态性能和控制能力之间达到折中平衡.
系统起初无退化,HD=1,随着执行器隐含退化的增加,系统状态偏离期望值,健康度降低,退化越严重,健康度越小.结合健康度评价结果与维护需求,HD>HDn时,退化对于系统影响较小,无需修正;当HDsf≤HD ≤HDn,且不满足工作时限td要求时,调整权值矩阵,变化越大,维护需求大,增大Q,R调整尺度,变化越小,维护需求小,微调Q,R;而当HD<HDsf时,应停止对Q,R权值矩阵的修正.综上,可得图3融合健康度与维护需求的权值矩阵调整趋势.
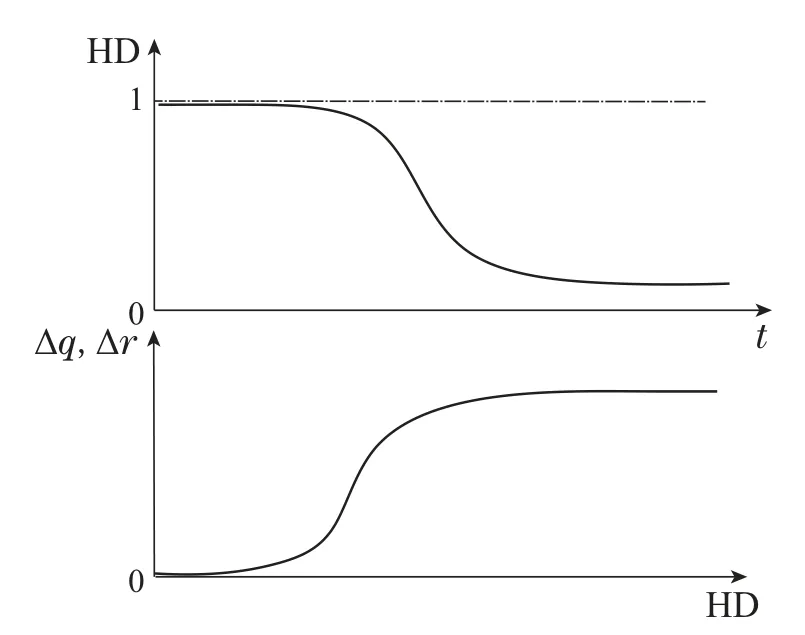
图3 基于健康度的权值矩阵Δq,Δr调整示意图Fig.3 Schematic diagram of weight matrix Δq and Δr adjustment based on health degree
基于HD的矩阵Q,R修正量Δq,Δr如下:
其中:q(t)≥qmin,r(t)≤rmax,K1,K2∈(0,+∞)可改变调整参数Δq和Δr的范围.
四旋翼无人机在线自主维护流程如图4所示.

图4 基于健康度的四旋翼无人机自主维护算法流程图Fig.4 Flow chart of autonomous PdM algorithm for quadrotor UAV based on health degree


图5 执行器退化真实值与估计值Fig.5 True value and estimated value of actuator degradation
5 仿真结果分析
5.1 仿真描述
为了验证文中方法的有效性,对象参数选取如表1所示进行仿真.

表1 四旋翼无人机物理参数Table 1 Physical parameters of quadrotor UAV
取外部干扰信号,fi=[0.00001 0.00002 0.00001 0.00001 0.00003 0.00004],且Fi≤0.0001.MPC控制参数分别取: 控制步长Nc=3,预测步长Np=5,误差权重和控制量权重矩阵的初始值分别取为q0=2,r0=0.01,qmin=1.5,rmax=1,采样周期Δt=0.1.
假设四旋翼无人机机体性能开始退化和不满足要求时的健康度分别为HDn=0.9,HDsf=0.7,期望工作时限为td=500 min.
5.2 四旋翼无人机退化过程估计
滤波器初值设为
采用前述熵权法得到的综合退化量曲线如图6所示.从图中可以看出,综合退化量ds(t)与退化严重的执行器1的退化趋势一致性较高,因而综合退化量也服从Wiener过程,参数估计采用“fminsearch”函数,得

图6 综合退化量与各执行器退化量变化曲线Fig.6 Degradation curves for both comprehensive and individual actuator
考虑有界外部扰动影响,采用TSKF,各实际状态与估计状态的均方根误差(root mean squared error,RMSE)为:RMSE=[2.2908 0.7631 2.8824e-04 2.8824e-04 8.6473e-04 0.0012].这表明TSKF对外部扰动具有一定的鲁棒性,估计状态能够很好的表征实际状态,因而基于此开展无人机自主维护是准确有效的.
5.3 四旋翼无人机自主预测维护效果
无人机自主预测维护的目的在于采用合适的维护策略,延长机体用寿命,确保机体和随机携带设备的安全性.通过第3.3节描述可知,机体寿命与HD相关,而HD的定义与当前状态偏离期望状态的马氏距离成负向函数关系.因此,四旋翼无人机维护前后机体状态、健康度等都会发生改变.
为验证本文基于健康度自适应维护策略的有效性,对其与固定因子权值修正方法进行了对比,Q,R调整因子δ1=0.008,δ2=0.009.图7给出了4个执行器退化过程中,采用不同维护策略后四旋翼无人机位置和姿态变化情形.从图中可以看出,采用固定值维护策略和本文基于健康度的维护策略均可以改变机体状态,延长机体使用时间,而采用本文维护策略后,机体状态(红色曲线)急剧下降最为缓慢,这也说明机体寿命最长.

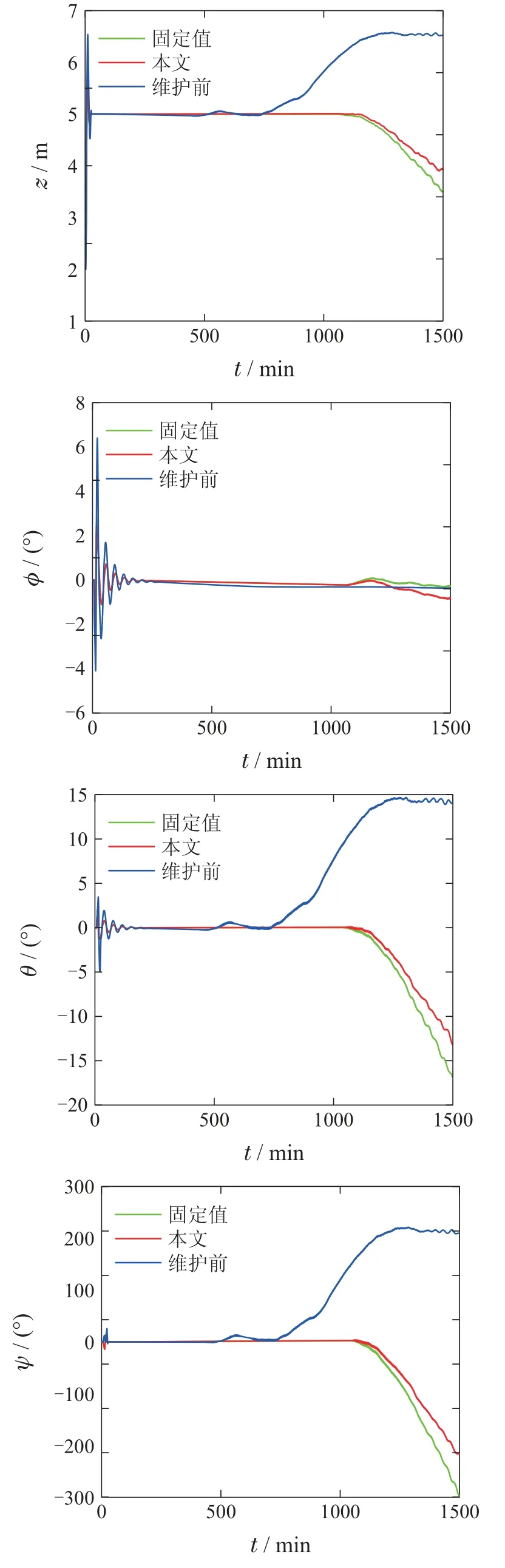
图7 执行器退化时四旋翼无人机响应曲线Fig.7 Response curves of quadrotor UAV with actuator degradation
机体健康度作为自主维护的重要指标,是确定无人机维护时机和维护的重要依据,图8给出了采用不同维护策略后机体HD变化曲线.3条HD曲线进一步表明采用维护策略后,即使在外部干扰影响下,机体寿命得到延长且满足了工作时限要求,而采用本文基于HD的维护策略效果更优.
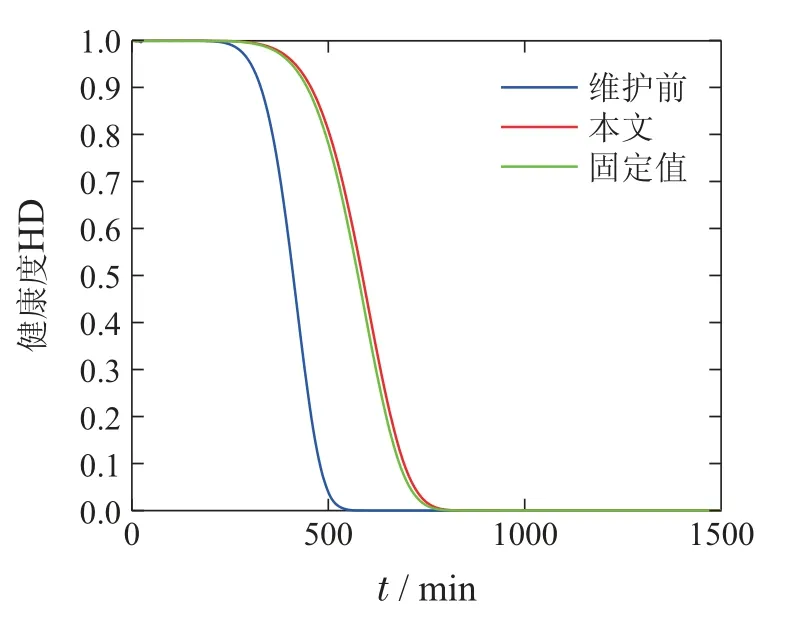
图8 健康度HD变化曲线Fig.8 Change curves of health degrees
取健康度失效阈值HDsf=0.7,依据式(36)得,综合失效阈值lsf=0.2117,结合式(39)计算四旋翼无人机RUL分布,如图9所示.
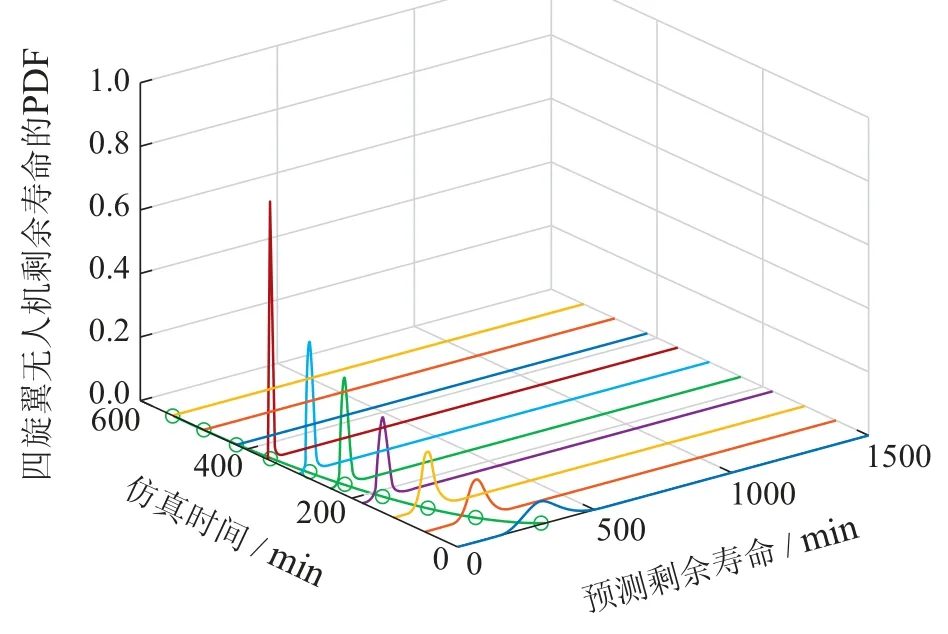
图9 四旋翼无人机剩余寿命分布Fig.9 Distribution of RUL of quadrotor UAV
四旋翼无人机超出期望健康度约束时无人机寿命tsf=386 min,不满足期望工作时限性要求.可以看出,基于健康度约束机体性能,结合综合退化感知量,使机体剩余寿命预测变得更加直接便利且准确.
依据前述四旋翼无人机自主维护策略可知,健康度HDn=0.9,无人机进入退化状态,若所需最短的期望延寿时间tex>0,则考虑基于式(44)自适应调整Δq,Δr,通过减小Q矩阵和增大R矩阵中各对角元素的权重值,以降低稳态性能约束并减小执行器出力,从而延缓执行器退化进程,延长机体使用寿命.
利用式(41)计算得,机体健康度HDn=0.9 时,tk=336 min,tex=142 min>0,因此机体进入退化状态后即开始实施维护.取K1=120,K2=100,得到图10矩阵Q,R修正量Δq,Δr和图11调整后权值矩阵Q,R的变化曲线.

图10 Δq,Δr调整曲线Fig.10 Adjustment curves of Δq and Δr
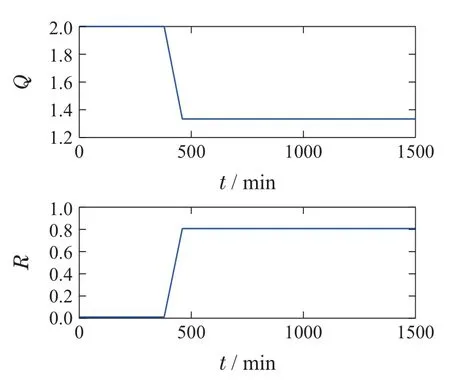
图11 延寿控制Q,R调整曲线Fig.11 Adjustment curves of Q and R for life extension control
伴随执行器退化,四旋翼无人机偏离期望状态,致使执行器输出压力增大,加剧其退化进程.图12给出了自主维护前后执行器控制电压u1变化曲线,可以看出维护后执行器输出压力得到有效缓解,为无人机正常工作赢得了更多时间.

图12 执行器维护前后控制量曲线Fig.12 Control quantity curves before and after actuator maintenance
采用本文自主维护方法后,无人机剩余寿命分布如图13,机体寿命延长至tsf=523 min,同时满足了无人机健康度和工作时间要求,这进一步验证了基于健康度自适应调整权值矩阵的方法对无人机自主维护的有效性.
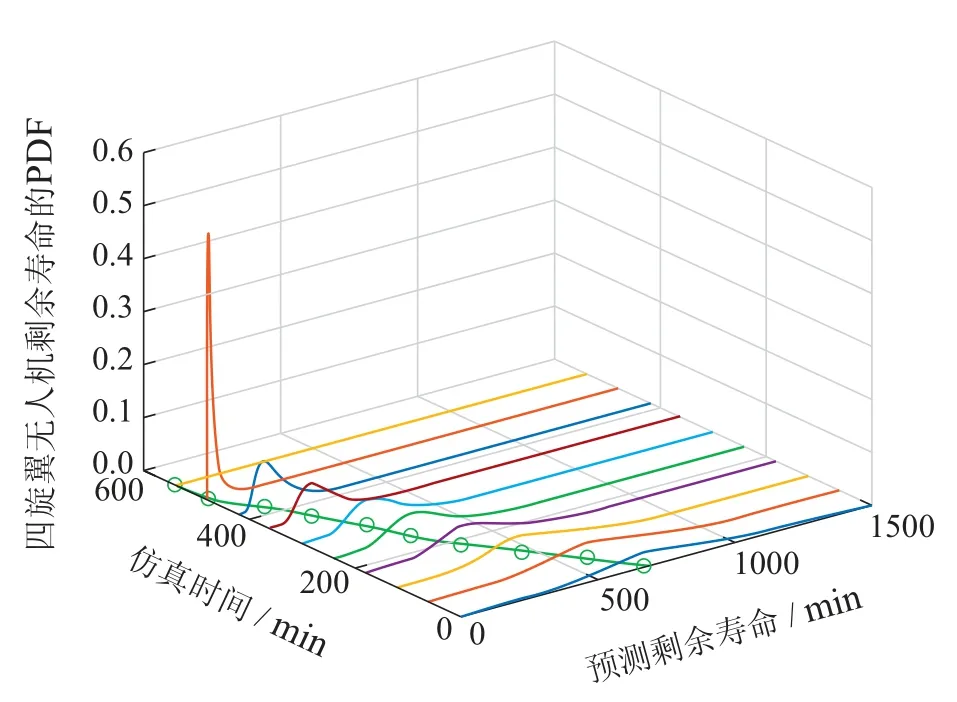
图13 四旋翼无人机维护后剩余寿命分布Fig.13 Distribution of the RUL of the quadrotor UAV after maintenance
表2给出了未维护和采用不同维护策略后的失效阈值和机体寿命,也进一步证实了本文方法的优点.究其原因在于基于健康度的自适应维护策略,能够依据机体状态实时修正权值矩阵,维护针对性更强.
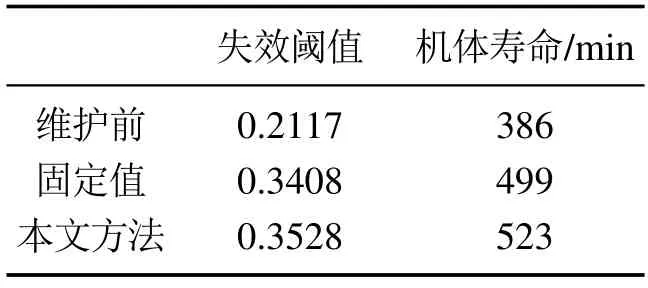
表2 不同延寿策略下失效阈值与机体寿命Table 2 Failure threshold and airframe life under different life extension strategies
6 结论
本文针对处于悬停状态的四旋翼无人机,考虑多执行器隐含退化,开展了寿命预测与自主维护方法研究的相关工作.文中采用两阶段卡尔曼滤波方法,实时估计系统状态和各执行器退化率,并用熵权法将执行器退化量融合为一综合退化量,基于系统健康度的定义确定首达失效阈值,得到四旋翼无人机剩余寿命解析解.同时考虑健康度和工作时限约束,依据健康度指标调整MPC权值矩阵,实现自主维护的目标.实际中无人机的工作状态包括悬停、俯仰、偏航、滚转等姿态,本文从无人机建模到后续方法仅考虑了基础悬停状态,后续研究将进一步扩展到其它状态,硬件在环中的实验亦需推进.
