模型不确定下无人艇协同目标跟踪控制
2023-02-09高胜男彭周华李铁山
高胜男 ,彭周华 ,王 丹 ,李铁山
(1.大连海事大学船舶电气工程学院,辽宁大连 116026;2.北方工业大学电气与控制工程学院,北京 100144;3.电子科技大学自动化工程学院,四川成都 611731;4.水路交通控制全重实验室,辽宁大连 116026)
1 引言
近年来,由于无人艇(unmanned surface vehicle,USV)在侦察搜索、反潜作战、环境监测与船只补给中的重要应用,其运动控制受到了越来越多的关注[1-2].根据受控无人艇数量的不同,可以分为单无人艇运动控制和多无人艇协同运动控制.多无人艇协同作业可以完成单一无人艇不能高效完成或无法完成的复杂任务,在军事和民用领域中或的广泛应用[2].根据运动场景的不同,协同运动控制技术主要分为协同轨迹跟踪[3]、协同路径跟踪[4]、协同给目标包围[5]以及协同目标跟踪[6-7].其中,协同目标跟踪控制技术在对非合作目标进行探测、识别、捕获、跟踪过程中作用突出,典型应用包括“蜂群”跟踪、协同目标打击与海上溢油围捕等,成为当前备受关注的研究热点之一[8].
目前,针对单无人艇的目标跟踪问题,国内外科研人员已取得较为丰富的研究成果[9-20].文献[9]采用平行接近制导方法,解决了单无人艇在高速航行的情况下跟踪单个移动目标.文献[10]针对复杂海洋环境扰动下海洋航行器的单个目标跟踪问题,设计了一种基于神经网络的目标跟踪控制器,提高了控制器的鲁棒性.文献[11]针对控制输入增益函数部分已知的单目标无人艇跟踪问题,提出了一种仅需相对距离和相对角度信息的有限时间收敛无人艇控制器.文献[12]设计了一种基于传感器和通信系统的平行接近制导方法,通过跟踪位于目标附近的虚拟目标,实现了无人艇跟踪高速直线运动的目标.
值得注意的是,上述研究成果是在目标速度已知的前提下得到的,但在实际应用中,目标速度往往是不可获得的.因此,国内外学者针对速度未知的单无人艇目标跟踪问题展开一系列研究.文献[13]提出了一种仅基于测量距离的切换逻辑控制策略来解决目标跟踪问题.文献[14]提出了一种基于视距测量信息的无人艇三维目标跟踪控制器,采用神经网络自适应控制技术对系统的不确定性进行补偿.文献[15]研究了时变距离下的无人艇单目标跟踪问题,采用有限时间收敛的观测器观测未知的目标速度,实现了时变距离下无人艇单目标的跟踪控制.文献[16]针对目标动态未知的无人艇目标跟踪问题,提出了基于神经网络与动态面控制技术的目标跟踪控制方法.文献[17]提出了基于径向基函数和神经网络的目标跟踪控制器,解决了运动学和动力学同时存在不确定项的跟踪控制问题.考虑控制输入受限问题,文献[18]提出了基于饱和函数的控制器.文献[19]针对未知动态的单无人艇目标跟踪问题,提出了仅采用视距制导距离和角度信息的目标跟踪方法.文献[20]设计了基于滑模控制的领航-跟随目标跟踪控制器,解决了目标速度未知的跟踪控制问题.
但随着海上作业任务日益多样,任务难度逐渐提高,一对一的目标跟踪技术会限制无人艇在具有挑战性任务中的应用,例如多无人艇协同跟踪水下潜艇、对特定目标进行协同救援、海区遂行破障等任务,因此研究群体对单体的协同目标跟踪控制,具有较强工程应用前景[21].近年来,多无人艇协同目标跟踪控制取得了一些重要成果[7,22],如文献[7]针对时变海洋环境扰动下的目标跟踪问题,提出了分散式领导-跟随控制方法;文献[22]提出了基于零空间方法的控制器,实现了水面目标的捕获任务.值得注意的是,文献[7]和文献[22]实现了目标速度已知情形下多无人艇协同目标的跟踪控制任务.但在实际应用中,跟踪目标往往是速度难以获得的非合作目标,只能基于局部信息和探测信息完成对非合作目标的估计任务,这给协同目标跟踪控制带来了挑战[20].不仅如此,由于模型参数不确定与海洋环境扰动,跟随无人艇动力学模型含有非线性不确定项.扩张状态观测器作为处理包括内部模型不确定和外部扰动等非线性系统的有力工具,已经被广泛应用到工程领域中[23-30],如文献[20]和文献[26-27]采用了扩张状态观测器对目标的未知速度进行估计,分别实现了单无人艇目标环绕与跟踪任务.值得注意的是,上述文献[20,26-27]中基于扩张状态观测器的估计方法均应用于单无人艇系统,而对于存在感知信息不完全的多无人艇系统,目标位置信息可能仅对部分个体局部已知,跟随无人艇只能基于局部信息和探测信息完成对目标的跟踪任务,这给协同跟踪控制方法的设计带来了挑战[20].因此,如何构建分布式协同估计方法来获取未知的目标动态,为多无人艇协同目标跟踪控制方法的设计奠定基础,是亟待解决的关键问题.
基于以上几点,本章研究了感知信息不完全、模型参数不确定、海洋环境扰动下的多无人艇分布式目标状态估计与协同跟踪问题,提出了分布式分层协同目标估计与控制结构.首先,在通信层级,设计了基于单向通信拓扑的分布式扩张状态观测器(ESO),实现了对非合作目标速度与位置的分布式估计.随后,在控制层级,本文设计了仅需要相对距离的降维ESO,不仅实现了对由模型参数不确定与海洋环境扰动造成的未知动力学不确定性的准确估计,而且简化了观测器结构,降低了计算量;设计了基于降维ESO的抗干扰位置跟踪控制律,提高了协同目标跟踪的抗扰能力.文章采用级联系统稳定性分析证明了闭环系统是输入状态稳定的.此外,本文证明了闭环系统内跟踪误差是一致最终有界的.仿真结果验证了所提方法的有效性.所提方法的优点如下: 第一,与现有研究成果[9-20]提出的无人艇目标跟踪控制方法相比,本章针对多无人艇系统,构建了一种分布式分层协同目标估计与控制结构,实现了多无人艇协同目标的跟踪控制;第二,与现有无人艇协同目标跟踪方法[7,20]局限于目标速度已知相比,本章设计了分布式ESO,仅利用获知的目标位置信息,实现了对非合作目标速度与位置的分布式观测;第三,与现有研究成果[23-31]中的ESO相比,本章采用了降维ESO,不仅实现了对未知动力学的准确估计,提高了抗扰能力,而且简化了观测器的结构,降低了计算量.
2 问题描述
2.1 图论
在欠驱动无人艇运动控制方法中,可以由式G={V,E}来描述欠驱动跟随无人艇与目标无人艇之间的通信关系.其中V={n1,···,nN}表示节点集合,用来表示无人艇节点.E={(ni,nj)∈V×V}表示边集合,用来代表无人艇之间是否存在通信.定义一个邻接矩阵A=[aij]∈RN×N来描述无人艇之间的通信关系,如果(i,j)∈E,则aij=1,反之则为aij=0.
假设1有向图G中存在有向生成树,根节点能够获得目标无人艇信息.
2.2 无人艇运动数学模型
考虑如图1所示的由N艘欠驱动跟随无人艇和单艘目标无人艇组成的多无人艇系统.无人艇在水平面上的运动,可以由一个地球坐标XE-XE和一个无人艇本体坐标系XB-XB来描述.目标无人艇的运动学模型可以表示为[33]
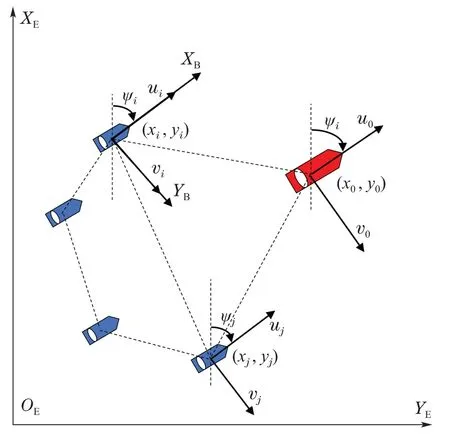
图1 多无人艇协同目标跟踪示意图Fig.1 Cooperative target tracking of multiple USVs
其中:x0,y0,ψ0分别表示目标无人艇在地球坐标系下XE轴坐标、YE轴坐标和艏摇角;u0,v0,r0分别表示目标无人艇在无人艇本体坐标系下的纵向速度、横漂速度和艏摇角速度.欠驱动跟随无人艇的运动学和动力学模型可以分别表示为
与
其中:xi,yi,ψi分别表示第i个跟随无人艇在地球坐标系下XE轴坐标、YE轴坐标和艏摇角(角度正方向如图1所示);ui,vi,ri分别表示第i个跟随无人艇在无人艇本体坐标系下的纵向速度、横漂速度和艏摇角速度;mui,mvi,mri分别表示第i个跟随无人艇在纵向、横漂、艏摇3个方向的质量与惯量;τui,τRi表示第i个跟随无人艇纵向方向的推力和艏摇方向上的力矩;τwui,τwvi,τwri表示第i个跟随无人艇外部海洋环境扰动.
本文的控制目标是设计一种分布式分层协同单目标估计与控制结构,使得运动学和动力学可分别由式(2)-(3)表示的欠驱动跟随无人艇能够对运动学由式(1)表示的非合作目标无人艇进行跟踪.
3 分布式分层协同目标估计与控制结构设计
本节目标是设计感知信息不完全下的分布式分层协同目标估计与控制结构.由文献[34]可知,无人艇之间保持相对运动角度变化运动,系统可观测.因此,首先在通信层级建立了基于单向通信拓扑的分布式ESO,实现了对非合作目标无人艇位置和速度的分布式估计.随后,在控制层级,结合视距制导原理,设计了仅需要相对视距距离的ESO,不仅实现了对由内部模型不确定和外部海洋环境扰动造成动力学不确定性的准确估计,而且简化了观测器的结构.最后,基于降维ESO,设计了抗干扰位置跟踪控制律,用于每个跟随无人艇跟踪非合作目标,不仅实现了编队模式下的协同目标跟踪,而且提高了协同目标跟踪的抗扰性.所设计的多无人艇分布式分层协同单目标估计与控制结构框图如图2所示.
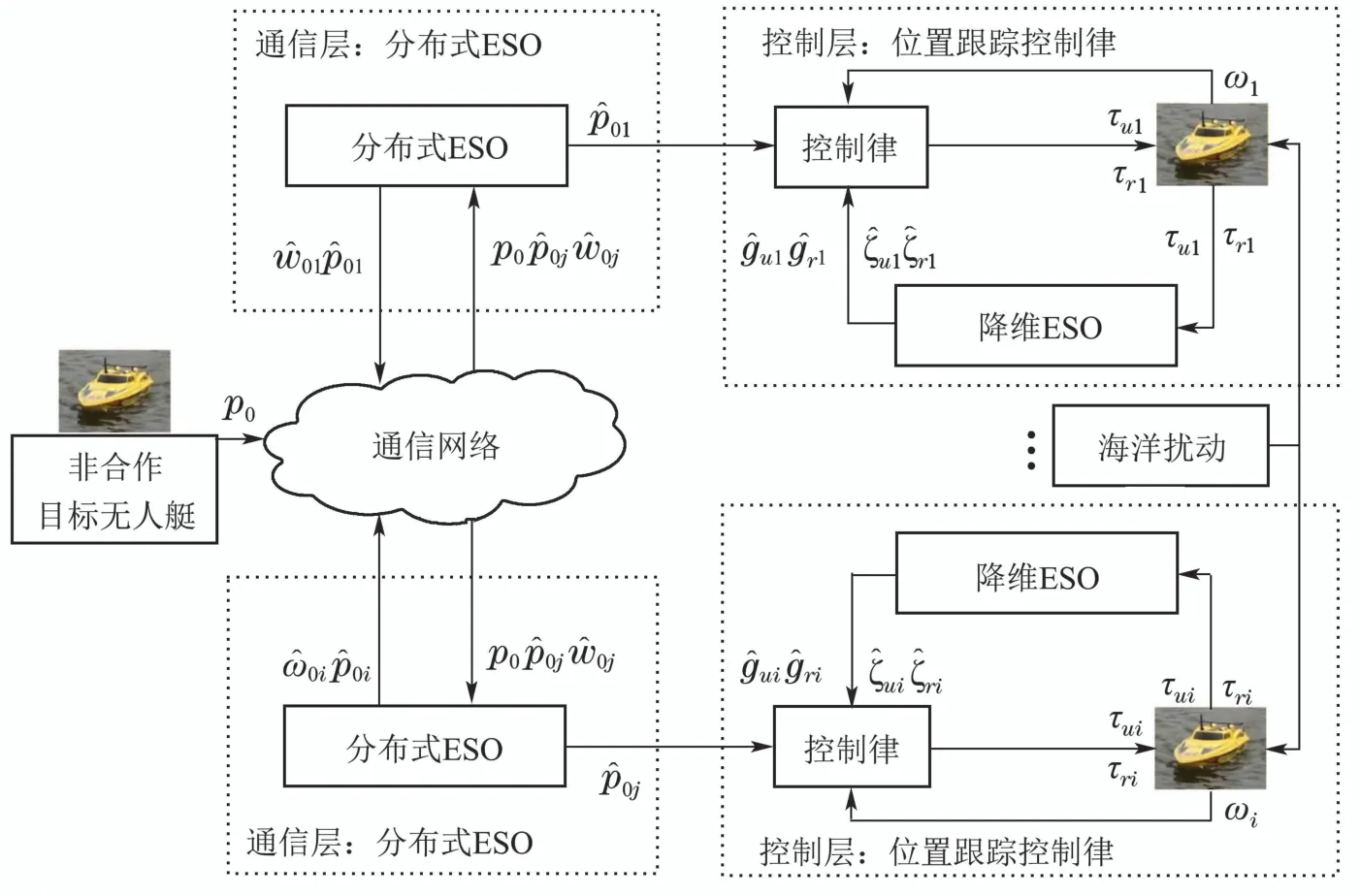
图2 分布式分层协同目标估计与控制结构图Fig.2 The distributed hierarchical coordinated target estimation and control structure
3.1 通信层设计
3.2 控制层设计
3.2.1 相对动态方程
定义第i个跟随无人艇与第i个由分布式ESO产生的虚拟点之间视距距离与角度为
其中:Δxi与Δyi表示设计的第i个虚拟点与目标无人艇之间的期望偏差.可以得到位置跟踪误差eρi与角度跟踪误差eβi为
式中:li为期望距离;θsi为侧滑角.随后,定义速度跟踪误差eui与eri为
式中αui与αri为虚拟控制律并将在下面进行设计.根据式(2)-(3),可以求得位置误差、角度误差和速度误差的动态方程,如下所示:
为了方便分析,将上述动态方程简化为如下形式:
式中
3.2.2 降维ESO设计
由于侧滑角未知、模型参数未知以及海洋环境扰动等因素,函数ζui,ζri,gui与gri是不可测的.为了估计上述未知函数,设计如下降维ESO
3.2.3 位置跟踪控制律设计
4 稳定性分析
4.1 分布式ESO误差子系统稳定性分析
证考虑如下李雅普诺夫函数
对Vχ进行求导,根据式(5)可得
定义2 位置误差。是点相对于坐标系在x,y,z方向的误差,例如球铰中心点相对于托架坐标系原点的位置误差、托架中心点相对于基坐标系的位置误差。
4.2 降维ESO误差子系统稳定性分析
对其进行求导,根据式(15)可得
其中:
4.3 跟踪误差子系统稳定性分析
引理4在满足假设1和假设2的前提下,跟踪误差子系统(17)以为输入,eρ,eβ,eu和er为状态,是输入状态稳定的.
证 建立如下李雅普诺夫函数:
对其进行求导,根据式(17)可得:
定义
可得
定理1考虑由非合作目标无人艇(1)和跟随无人艇(2)(3)组成的无人艇系统.满足假设1与假设2的前提下,采用分布式ESO(4),降维ESO(14),抗干扰位置跟踪控制律(16),则由子系统(5),子系统(15)和子系统(17)组成的闭环系统是输入状态稳定的,此外,系统中所有误差均为一致最终有界的.证毕.
5 仿真验证
考虑一个由六艘跟随无人艇和单艘目标无人艇组成的多无人艇网络系统,它们之间的通信拓扑关系如图3所示。

图3 通信拓扑网络Fig.3 Communication topology
无人艇集群之间的通信为单向通信.无人艇模型参考文挪威科技大学的Cybership II模型参数,该艇重23.8 kg,长度为1.255 m,宽度为0.29 m.无人艇初始状态及跟踪偏差为
无人艇模型未知非线性函数设置为
其中:
海洋扰动设置为
仿真结果如图4-11所示.图4给出了多无人艇的跟踪轨迹.图5-6给出所提分布式扩张状态观测器对目标位置速度的估计效果,可以看出,所提分布式扩张状态观测器可以准确的估计目标位置和速度.图7-8展示了降维扩张状态观测器对欠驱动无人艇未知运动学不确定性和动力学不确定性的观测效果.可以得出,所设计的降维扩张状态观测器可以准确估计无人艇相对动态不确定性与动力学不确定性.图9-10分别给出六艘欠驱动无人艇的位置、角度与速度的跟踪误差,可以看出,所有跟踪误差均收敛到原点的邻域内.图11给出了协同目标跟踪控制输入.
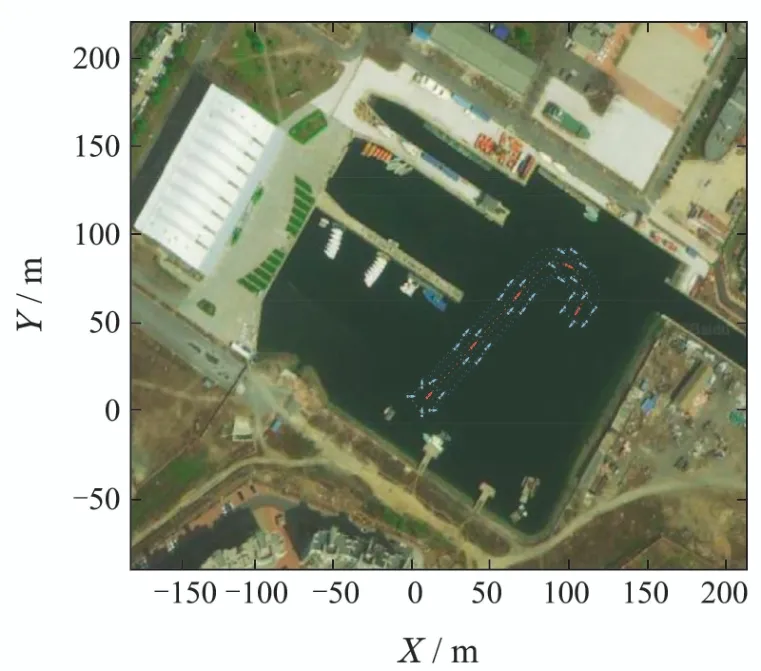
图4 协同目标跟踪效果图Fig.4 Cooperative target tracking performance
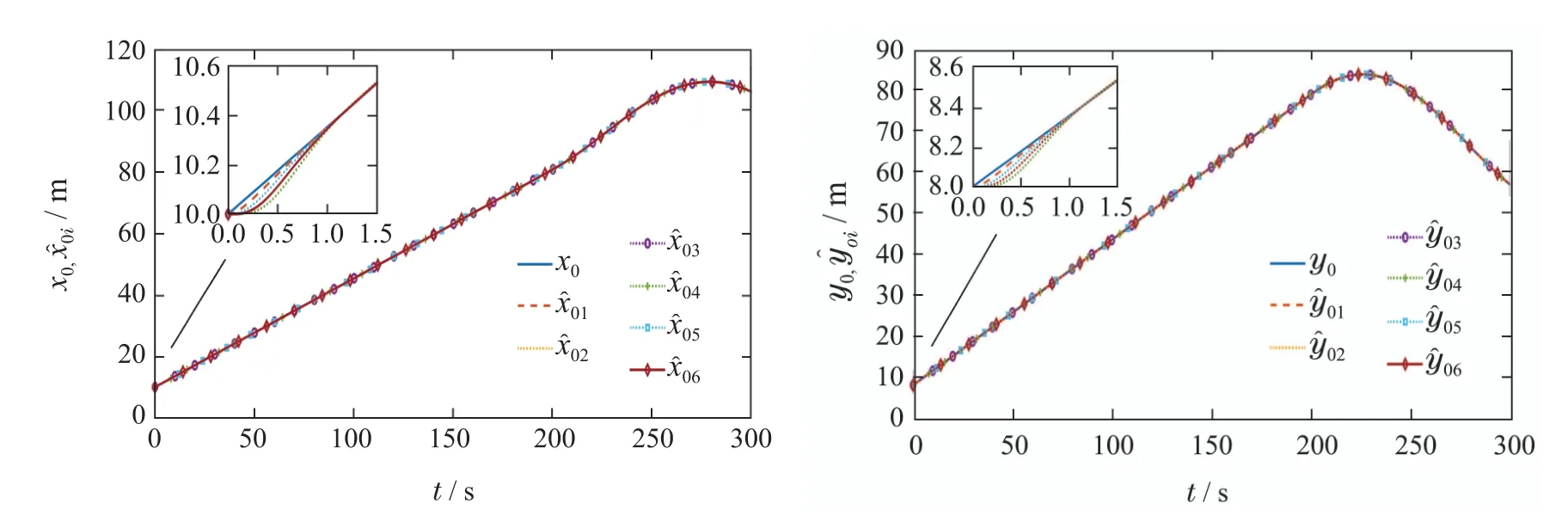
图5 分布式扩张状态观测器对位置的估计效果Fig.5 Cooperative target tracking performance
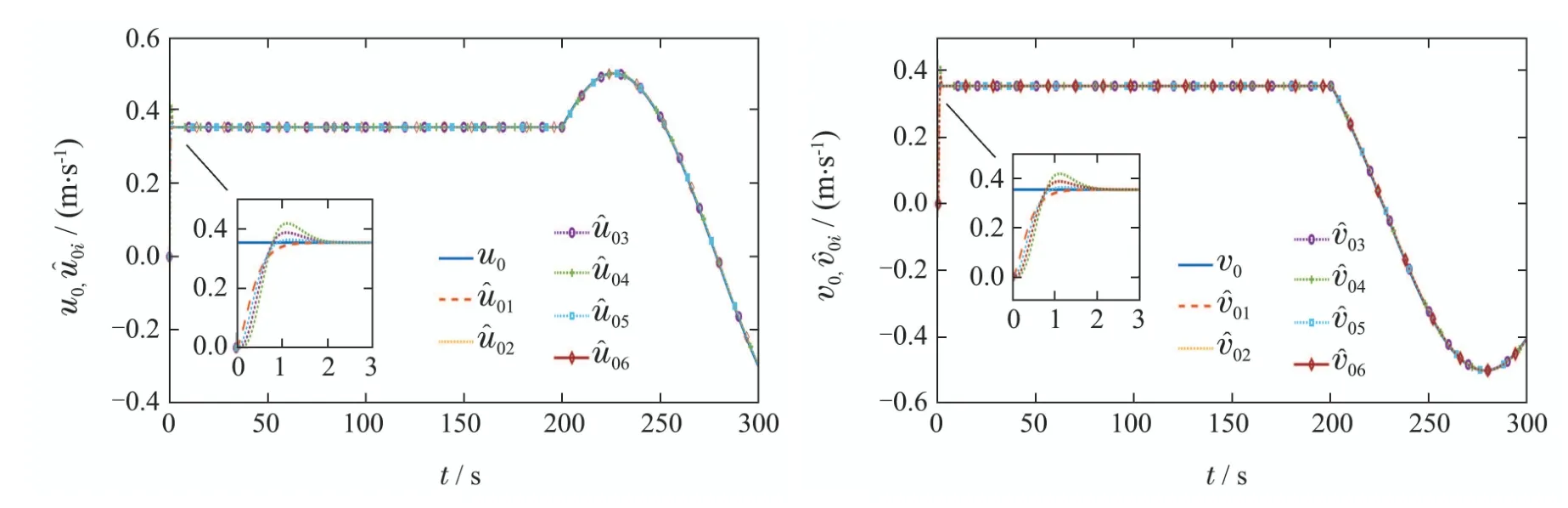
图6 分布式扩张状态观测器对速度的估计效果Fig.6 Velocity estimation performance of the distributed ESO
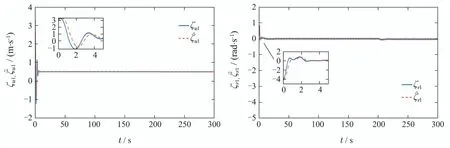
图7 降维扩张观测器对相对动态不确定性的估计效果Fig.7 Estimation performance of relative dynamics by using the reduced-order ESOs
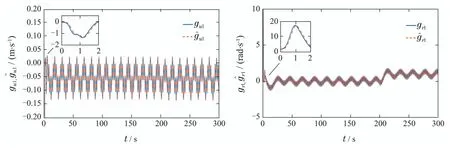
图8 降维扩张状态观测器对未知动力学的估计效果Fig.8 Estimation performance of unknown kinetics by using the reduced-order ESOs
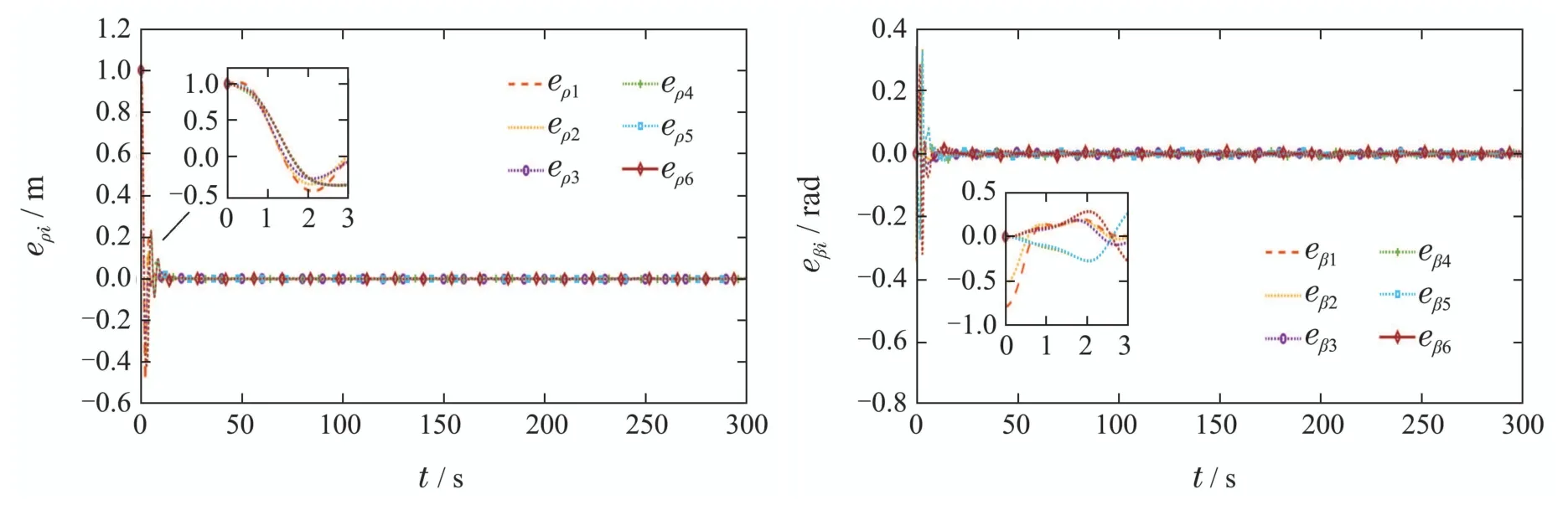
图9 位置与角度跟踪误差Fig.9 Position and angle tracking errors
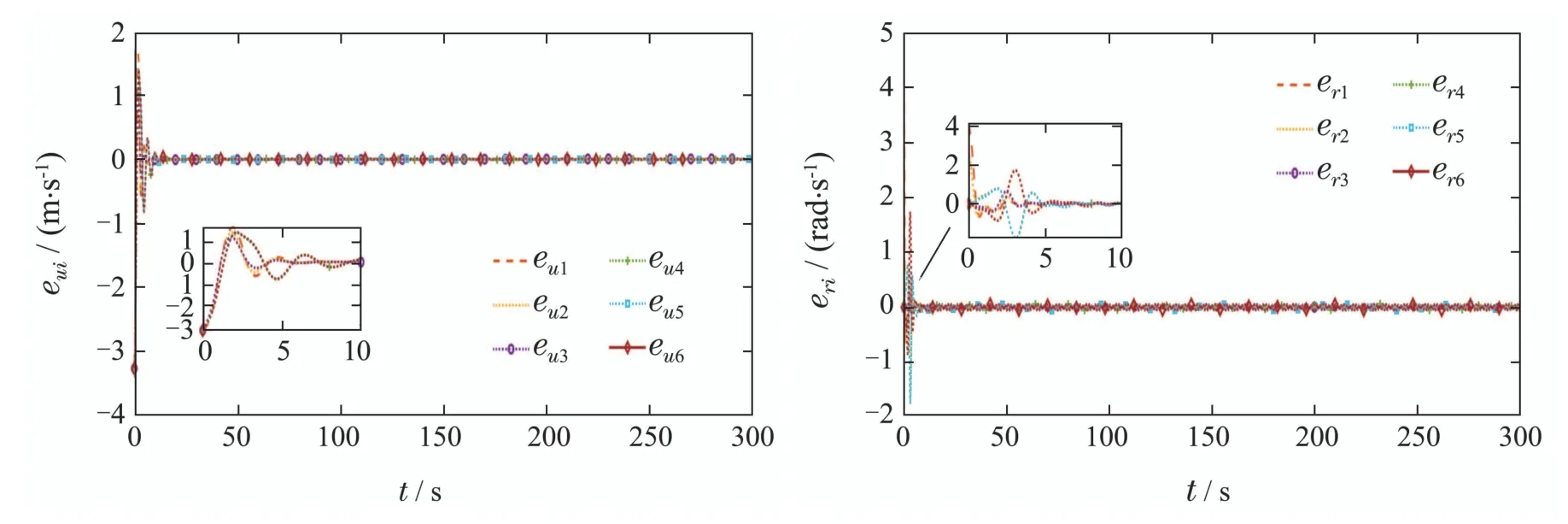
图10 速度跟踪误差Fig.10 Velocity tracking errors
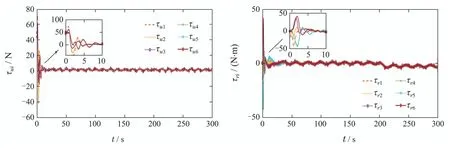
图11 协同目标跟踪控制输入Fig.10 Control inputs of coordinated target tracking
6 结论
本文研究了感知信息不完全下的多无人艇分布式目标状态估计与协同跟踪问题,提出了分布式分层协同目标估计与控制结构.在通信层级,设计了基于单向通信拓扑的分布式ESO,实现了对非合作目标速度与位置的分布式估计;在控制层级,设计了仅需要相对视距距离的降维ESO,不仅实现了对未知动力学不确定性的估计,而且简化了观测器的结构,并设计了抗干扰位置跟踪控制律,采用所提分层控制结构,不仅可以实现对非合作目标的分布式估计与协同跟踪,而且提高了协同目标跟踪得抗扰能力.本文所提方法的成功运用依赖网络通信的安全与稳定,未来将考虑如何设计适用性更广的控制方法,保障通信拓扑出现部分故障时系统的稳定性和安全性.
