车辆与二轮车预碰撞场景分析及其AEB 优化
2023-02-09徐向阳胡文浩张友王书翰何霞曹毅
徐向阳,胡文浩,张友,王书翰,*,何霞,曹毅
(1. 北京航空航天大学 交通科学与工程学院,北京 100191; 2. 西华大学 汽车与交通学院,成都 610039)
自动驾驶是实现交通“零伤亡、零事故”的必由之路,先进驾驶辅助系统(advanced driving assistance system, ADAS)作为自动驾驶功能的重要组成部分已经大量投放市场,其中,自动紧急制动(autonomous emergency braking,AEB)系统在紧急工况下,作为对车辆制动的主动干预手段备受关注。Fildes 等[1]对典型低速场景下的AEB 功能进行分析,认为在95%的置信度下AEB 系统能够避免38%的追尾事故。2017 年,美国国家公路交通安全管理局(NHTSA)和美国公路安全保险协会联合发布报告称,按照各汽车企业承诺的AEB 装车率,到2025 年美国将避免2.8 万起事故和1.2 万人员受伤[2]。然而,在面对复杂、多样的交通冲突场景时,其场景识别的准确度及决策算法的合理性面临着较大挑战,严重制约着AEB 系统的实际效用,甚至会带来一定的安全隐患,已有车辆因AEB 系统对复杂道路交通场景的误识别与不合理决策问题构成的缺陷实施了召回。
目前,各国车辆测试评价体系中逐渐增加了对AEB 功能的测试评价[3-5],初期主要针对车辆与车辆冲突的典型场景,在发展过程中逐渐加入了车辆与行人冲突的典型场景。现阶段,车辆与二轮车冲突的典型场景也在分阶段引入AEB 功能的测试评价中。但是,基于特定场地及场景的实车测试评价方法具有较强的局限性,无法全面有效评测AEB 系统安全性,需要进一步基于实际数据挖掘典型场景,扩大测试场景的覆盖度。
二轮车和行人在交通参与方中属于弱势道路使用者(vulnerable road user, VRU),然而相较于行人,二轮车使用者具有移动速度快、行驶路线不确定性强等特征,因此,二轮车参与的事故更易导致人员伤亡。据世界卫生组织2018 年统计报告显示,全球自行车使用者和机动二、三轮车使用者占道路交通死亡比例高达31%,占VRU 死亡比例达57%[6]。中国二轮车保有量巨大,据统计,2017 年中国道路交通事故死亡人数为63 772 人,其中机动二轮车和自行车使用者死亡人数为29 459 人,占道路交通死亡比例高达46.2%,占VRU 死亡比例达63%[7]。因此,在AEB 测试中,也应重点关注二轮车参与的冲突场景。
本文研究了现有基于不同数据源、采用不同分析方法得到的典型汽车与二轮车冲突场景,分析提取法规和NCAP 测试尚未涉及到的典型场景,并研究典型AEB 系统在相关场景下面临的挑战及优化方向。
1 典型场景分析与提取
科研人员基于自然驾驶数据和事故深度调查数据等,采用数据统计、聚类分析等方法开展了典型汽车与二轮车冲突场景挖掘研究。
Liers[8]基于德国事故深度研究(GIDAS)数据分析了机动二轮车(powered two-wheelers, PTW)参与的事故特征,并综合事故发生的具体责任情况,得出10 类最为频发的事故类型。李霖等[9]基于上海道路采集的自然驾驶数据,对数据中涉及二轮车的典型危险工况,采用聚类分析方法获得7 组典型危险场景特征,但相关场景特征元素不包括车辆相对运动方向,每一类均可以衍生多种场景组合。徐向阳等[10]基于国家车辆事故深度调查体系(NAIS)事故数据,采用聚类分析方法挖掘出8 类机动车路口事故场景。胡林等[11]依托419 例汽车与二轮车碰撞事故案例,采用聚类分析方法提取了11 类典型逻辑场景。Nitsche 等[12]针对1 056 例发生在路口的交通事故案例,采用k-medoids 聚类分析方法挖掘出15 类典型丁字路口危险场景和6 类十字路口逻辑场景。Sui 等[13]基于中国交通事故深入研究项目(CIDAS)事故深度调查数据,采用聚类分析方法分析了汽车与二轮车碰撞事故,得出4 类典型二轮车与汽车冲突场景。Cao 等[14]基于中国NAIS 事故深度调查数据,采用聚类分析方法分析了汽车与二轮车碰撞事故,得出4 类典型汽车与二轮车冲突场景,由于数据源的不同,与Sui 等[13]的研究成果在场景特征方面存在一定差异。Hu 等[15]基于全球事故协调计划(IGLAD)数据,分析了以中国、欧洲、美国和印度为主要类别国家的事故特征,共得出7 类典型汽车与二轮车冲突场景。
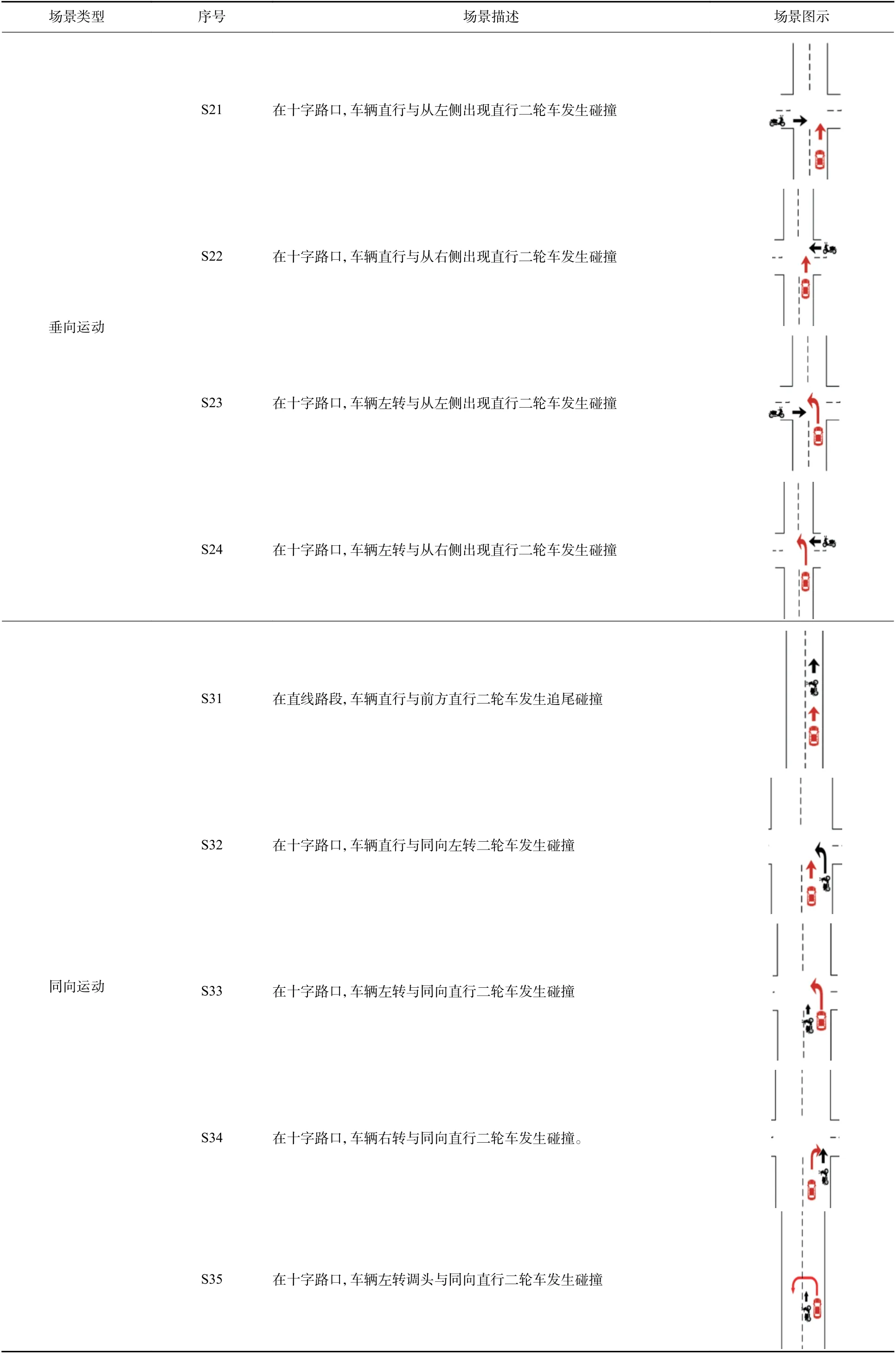
综上,提取汽车与二轮车运动和路段特征,共得出汽车与二轮车预碰撞场景12 类,其中,汽车与二轮车相向运动的场景为3 类,垂向运动的场景4 类,同向运动的场景5 类,如表1 所示。

表1 汽车与二轮车预碰撞场景Table 1 Pre-crash scenario between vehicle and two-wheeler
续表
AEB 系统对目标物的识别与决策过程仅限于碰撞发生前,即预碰撞阶段,由于场景S13 与S31、S21 与S23、S34 与S35 在预碰撞阶段车辆与二轮车相对位置基本相同,将相关场景进行合并。考虑到场景S24、S32、S33 和S34 中,二轮车未出现在车辆前部,与AEB 关注的前向冲突场景不符,本文在后续分析中不予考虑。同时,文献[3-4]已将S21、S22 和S31 场景引入测试规程,不予进一步考虑。本文将重点关注交通参与双方路权冲突可能性较大的场景S11 和S12,分析相关场景下AEB 系统优化可能面临的挑战,相关场景均涉及参与方转弯,与文献[5]中规划的参与方转弯特征一致。
2 场景S11 下AEB 触发及改进分析
2.1 AEB 模型构建
以车辆前部传感器为原点建立运动坐标系,车辆正前方为y轴,垂直行驶方向为x轴。典型AEB识别区域及触发模型如图1 所示。当二轮车的运动轨迹进入触发区域内时,会触发AEB 系统采取全力制动。触发区域②由3 个数据决定:一是制动触发宽度w;二是制动触发时间(time to collision,TTC),与触发距离S和相对运动速度 Δv相关;三是视场角(field of view, FoV)。设定典型车辆AEB 系统传感器及触发参数条件如表2所示。

表2 典型AEB 参数条件Table 2 Typical AEB parameter conditions
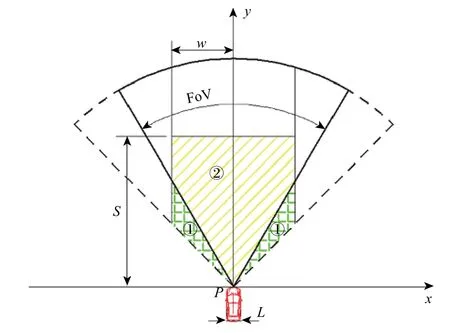
图1 典型AEB 触发模型Fig. 1 Typical AEB trigger model
在运动坐标系中,标记不同场景下二轮车的运动轨迹,随着时间的推移,根据二轮车与车辆相对运动状态的不同,二轮车呈现不同的运动轨迹,不断接近乘用车。Cao 等[14]对场景S21 和S22 的分析中提出,二轮车相对乘用车的运动轨迹可拟合为直线y=ax,并在此基础上提出了AEB 各关键参数之间的相互制约关系。
2.2 场景S11 构建及AEB 触发情况分析
场景S11 中,在十字路口,车辆直行与对向左转二轮车发生碰撞。由于二轮车存在直行和转弯2 种运动状态,重点考虑二轮车进入弯道之后的轨迹特征。设定二轮车转弯时刻的车辆位置为原点,车辆运动方向为y轴,垂直运动方向为x轴,建立坐标系,车辆与二轮车运动轨迹特征如图2 所示。图中:d为初始时刻二轮车相对于车辆的横向距离;S为初始时刻二轮车相对于车辆的纵向距离;r为二轮车转弯半径;α为二轮车转弯角度。
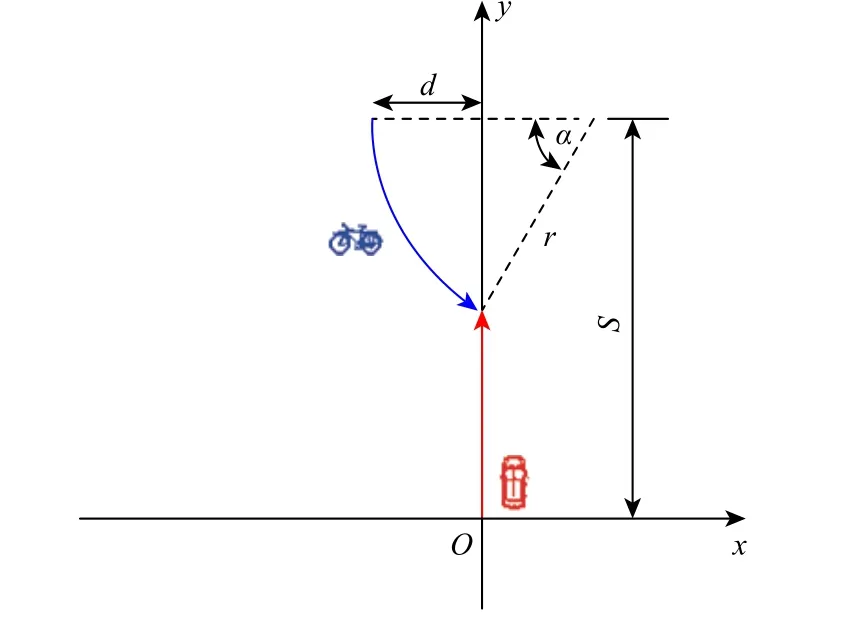
图2 场景S11 参与方运动轨迹特征Fig. 2 Trajectory characteristics of participants in S11
根据中国道路交通法规的相关要求,中国城市道路一般最高限速为70 k m/h,其中在转弯工况下,车辆受横向离心力作用,最高速度为30 k m/h。因此,在场景S11 和S12 中,乘用车转弯工况下,速度设置为30 k m/h ,直行工况下,速度设置为30 k m/h、50 k m/h 和70 k m/h;二轮车转弯工况下,速度设置为20 k m/h 和30 k m/h ,直行工况下,速度设置为20 k m/h、30 k m/h 和50 k m/h。
按照上述速度分布,选取典型速度组合,将场景S11 中车辆和二轮车速度 (vv,vt)分 别设置为(30,20)km/h 、(30,30)km/h 、 (50,30)km/h和 (70,20)km/h,在Pre-scan 中建模,如图3 所示,导出二轮车相对汽车的位置信息,并绘制相对运动轨迹,如图4所示。
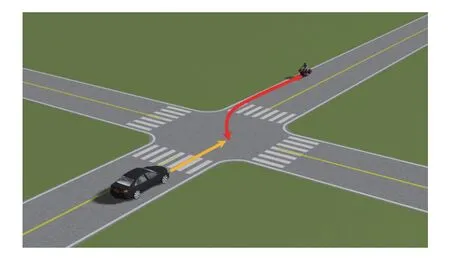
图3 场景S11 Pre-scan 模型Fig. 3 Pre-scan model of scenario S11
二轮车沿图4 所示轨迹靠近车辆,若车辆AEB系统触发宽度w大于二轮车相对车辆的横向距离d,AEB 避撞策略仅需考虑车辆和二轮车相对运动速度 Δv即 可。若w<d时,AEB 避撞策略则需要分析二轮车靠近车辆的角度 β与 FoV之间的关系,如图4 可知, β与vv和vt相关,且在二轮车靠近车辆的过程中逐渐增大。
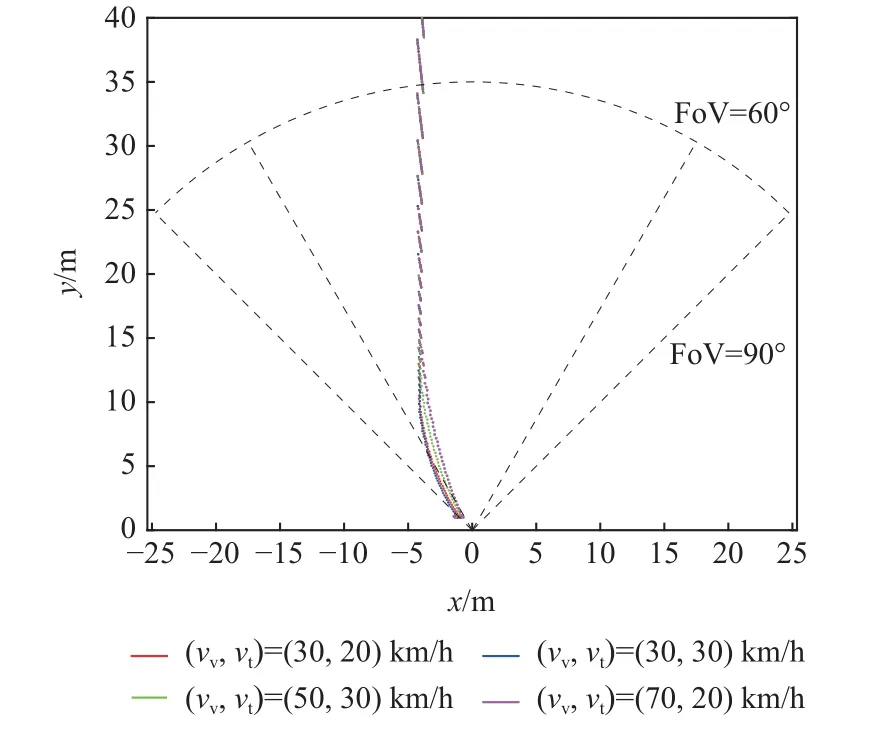
图4 场景S11 参与方相对运动轨迹Fig. 4 Relative trajectories of participants in scenario S11
2.3 场景S11 数学模型构建及AEB 改进分析
为进一步量化分析AEB 系统参数设置及改进方向,对场景S11 中二轮车相对于车辆的运动轨迹进行建模分析。
二轮车在图2 所示固定坐标系的轨迹表达如下:

由于车辆为直线运动,运动坐标系的移动仅是平移,在运动坐标系下,二轮车的轨迹 (x,y)与固定坐标系的轨迹(x0,y0)关系为

式中: (dx,dy)为动态坐标系相对固定坐标系的移动坐标。 dx=0, dy=vvt,可得二轮车在运动坐标系下的轨迹表达式为

令t=t0时,车辆与二轮车发生碰撞,如图2 所示,可得如下方程组:
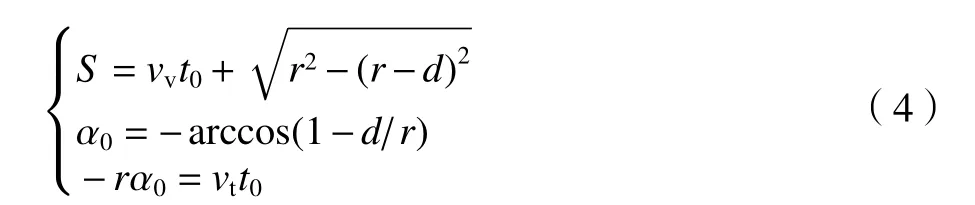
令二轮车转弯半径r=8 m,二轮车与汽车横向距离d=4 m ,代入方程组(4)可得S=6.93+8.38vv/vt。进一步代入表达式(3),可得

消元分析可知,相对运动轨迹仅与vv/vt相关,令ηvt=vv/vt, 绘制不同 ηvt下二轮车相对于车辆的行驶轨迹,如图5 所示。

图5 不同η vt下场景S11 参与方相对运动轨迹Fig. 5 Relative participants trajectories of different ηvtin scenario S11
进一步分析二轮车相对车辆的运动轨迹。若要二轮车进入车辆AEB 触发域,则运动轨迹与x=-1.5 m的交点A应位于触发域边界上,即y>w.cot(FoV/2)。令f(t1)=-1.5, 可 得g(t1)=1.12+1.88 ηvt。令g(t1)>w.cot(FoV/2)(F oV=60°) ,可得ηvt>0.788 8, 即当ηvt>0.788 8时,二轮车能够进入车辆AEB 触发域。
若增加 F oV , 可增加车辆的探测范围,令FoV=90°,可得 ηvt>0.203 3, 即当vv/vt>0.203 3时,二轮车能够进入车辆AEB 触发域,车辆与二轮车速度比值范围得到大幅度提升。
与此同时,若要车辆AEB 具有最佳的AEB 触发效果,则需g(t1)≥TTC.Δv,即ηvt>(Δv-1.12)/1.88 >0.788 8, 其中 Δv为二轮车相对于车辆的纵向运动速度。若 Δv较高时,需要进一步提高vv/vt值,方可使车辆AEB 达到最佳触发效果。
可见,在现有AEB 配置条件下,场景S11 中AEB能否触发与二轮车速度和车辆速度的比值直接相关, ηvt越大,车辆传感器越容易探测到二轮车。而通过增加AEB 系统 F oV,可大幅增大车辆的速度范围,有效增加车辆对类似场景的应对能力。与此同时,若要AEB 达到最佳触发效果,需要综合考虑车辆和二轮车的纵向相对速度,随着纵向相对速度增大,需要 ηvt值越大。
3 场景S12 下AEB 触发及改进分析
3.1 场景S12 构建及AEB 触发情况分析
场景S12 中,在十字路口,车辆左转与对向直行二轮车发生碰撞。仅考虑车辆进入弯道之后的轨迹特征,设定车辆转弯时的车辆位置为原点,车辆运动方向为y轴,垂直运动方向为x轴,建立坐标系,车辆与二轮车运动轨迹如图6 所示。
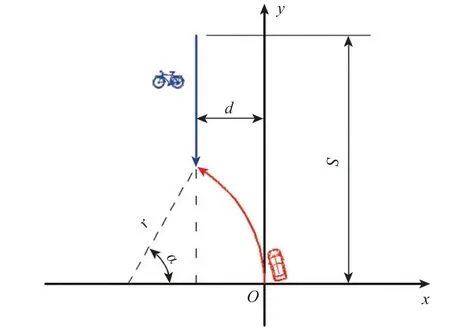
图6 场景S12 参与方运动特征Fig. 6 Trajectory characteristics of participants in S12
将场景S12 中二轮车和车辆速度 (vv,vt)分别设置 为 (30,20)km/h、 (30,30)km/h和 (30,50)km/h,在Pre-scan 中建模如图7 所示,导出二轮车相对汽车的位置信息,并绘制相对运动轨迹,如图8 所示。
图7 场景S12 Pre-scan 模型Fig. 7 Pre-scan model of scenario S12
二轮车沿图8 所示轨迹靠近车辆,在设置典型速度下,当F oV= 60°时,能够满足车辆对二轮车的探测要求。可见,在场景S12 下,车辆转弯并没有对FoV提出更为严苛的探测要求。然而,二轮车运动轨迹有超出AEB 触发宽度w的情况,可能会降低AEB 制动效果。
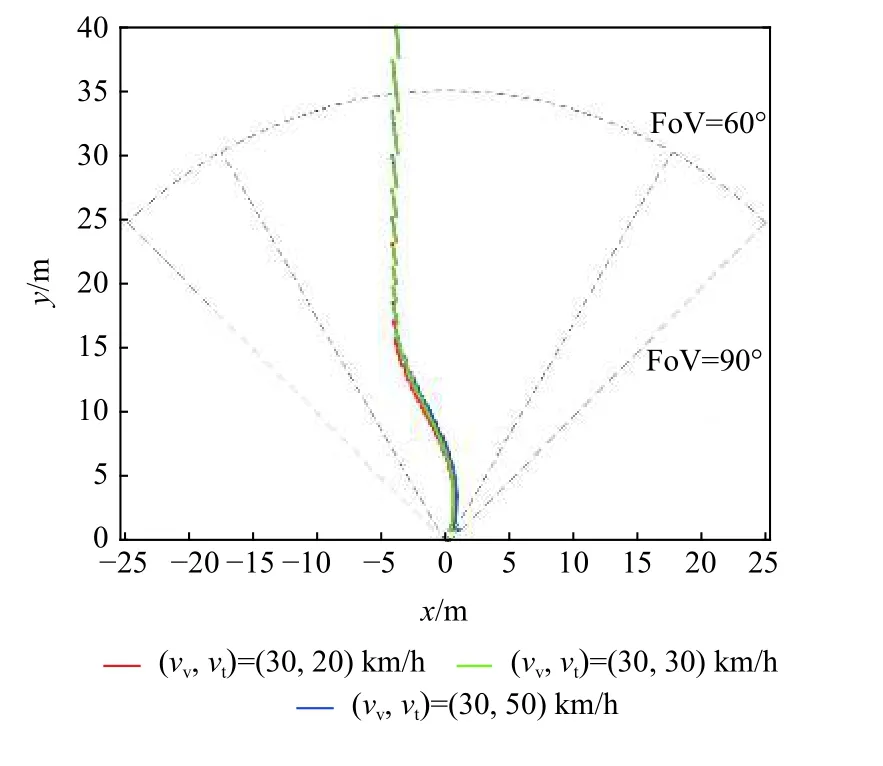
图8 场景S12 参与方相对运动轨迹Fig. 8 Relative trajectories of participants in scenario S12
3.2 场景S12 数学模型构建及AEB 改进分析
对二轮车相对车辆的运动轨迹建立数学模型,二轮车在图6 所示固定坐标系下的运动轨迹表达为

运动坐标系随着车辆移动,运动轨迹既有平移,也有转动,则在运动坐标系下二轮车的轨迹(x,y)与固定坐标系的轨迹(x0,y0)关系为

式中: α 和 (dx,dy)分别为动态坐标系随车辆相对固定坐标系的转角和移动坐标。 α =-vvt/r,dx=-(rrcos α),dy=rsin(-α),代入表达式(7)可得
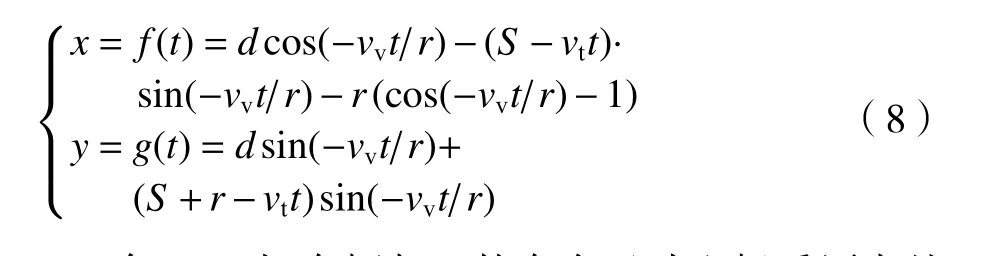
令t=t0时,车辆与二轮车在运动坐标系原点处发生碰撞,如图6 所示,可得如下方程组:

令二轮车转弯半径r=8 m,二轮车与汽车横向距离d=4 m ,代入方程组(9),计算可得S=6.93+8.38vt/vv,进一步代入表达式(8)可得
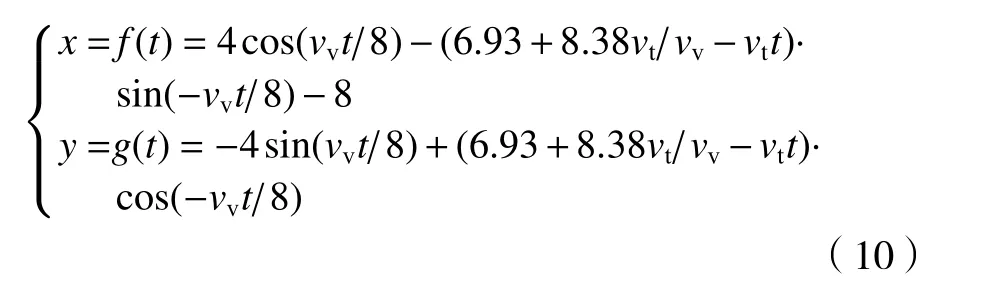
对表达式(10)进行化简分析可知,二轮车相对于车辆的轨迹方程h(x,y)仅 与vt/vv相 关,令vt/vv=ρtv,进一步化简消元可得
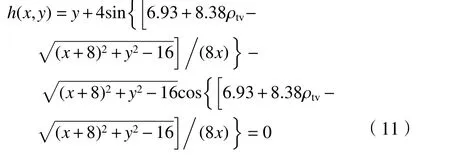
绘制不同 ρtv下二轮车相对于车辆的行驶轨迹,如图9 所示。
由于车辆触发宽度w=1.5 m, 令x=f(t1)=1.5 m,则g(t1)为 二轮车轨迹与x=1.5 m的交点。如图9 所示,若g(t1)不存在或为单值,则二轮车轨迹从左侧或者前侧进入触发域后,始终保持在触发域内,AEB具有较好的制动效果;若g(t1)为双值,则表明二轮车轨迹有从图示右侧进入触发域的情况。针对方程(11),令x=1.5 m ,绘制y与 ρtv的关系曲线,如图10所示。
从 图10 中 曲 线 趋 势 可 知, ρtv=1.1时,y为 单值,即二轮车在运动坐标系下的轨迹与x=1.5 m相切。随着 ρtv增大,y呈直线上升,两者关系曲线近似为y=9.64ρtv-2.46 。 由此可知,当 0 <ρtv≤1.1时,二轮车轨迹从触发域左侧或者前侧进入触发域,并始终保持在触发域内,AEB 具有较好的制动效果。若ρtv>1.1, 二轮车运动轨迹与x=±1.5 m有3 个交点,分别为A、B和C,如图9 所示。若要车辆AEB具有较好的制动效果,则需交点A位于触发域边界上,即y<TTC.Δv, 进一步计算可知,当1.1 <ρtv<(Δv+2.46)/9.64时,车辆AEB 具有较好的触发效果,但由于二轮车进入AEB 触发域后再次离开触发域,存在误判的可能性。
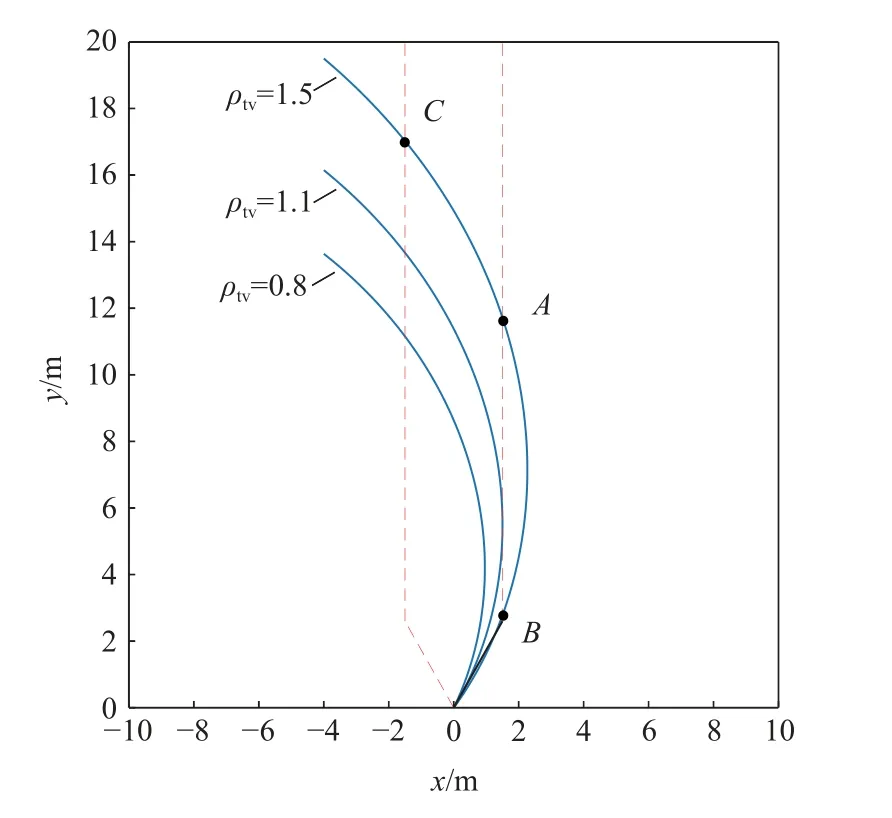
图9 不同 ρtv下场景S12 参与方相对运动轨迹Fig. 9 Relative participants trajectories of different ρtvin scenario S12
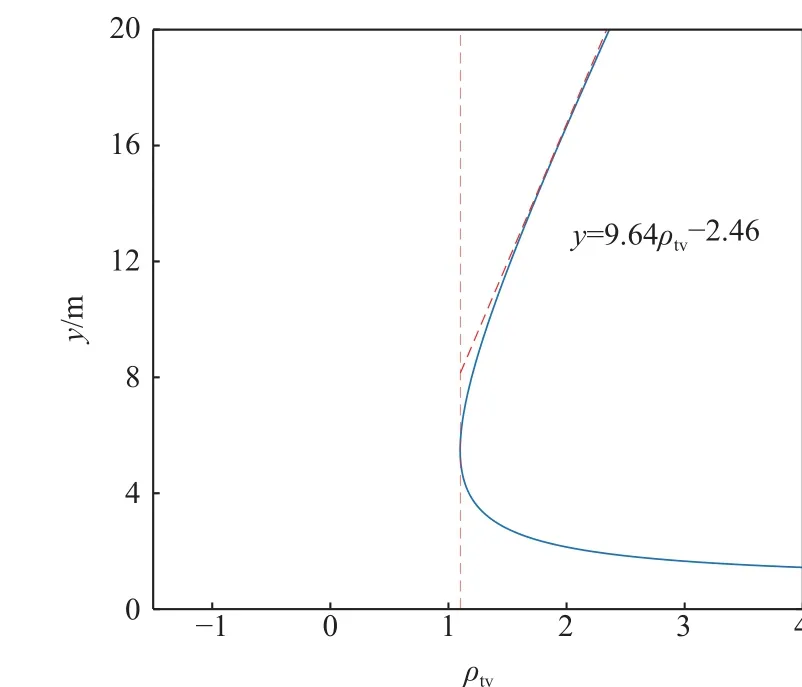
图10 场景S12 下 y 与 ρtv的关系Fig. 10 Relationship between y and ρtv in scenario S12
由于触发宽度w是制约场景S12 中AEB 触发效果的关键参数,将触发宽度w从 1 .5 m 扩 大至 2 m,若要二轮车运动轨迹从左侧或者前侧进入触发域后,始终保持在触发域内, ρtv取 值范围从 (0,1.1] 增加至 (0,1.36],改善幅度不大,且w增加会增加AEB的误动作,因此不建议通过调整触发宽度来改善AEB触发域。
4 结 论
本文通过对国内外相关研究进行分析,提取典型车辆与二轮车预碰撞场景,通过建立Pre-scan 模型和数学模型的方式对典型AEB 系统在相关场景下的效用及改进方向进行定性和定量分析,得出如下结论:
1) 分析国内外基于不同数据、采用不同方法研究的车辆与二轮车事故场景,共得到汽车与二轮车预碰撞功能场景12 类,其中汽车与二轮车相向运动的场景为3 类,垂向运动的场景4 类,同向运动的场景5 类。
2) 面向车辆典型AEB 系统测试需求,排除国内外标准法规已经纳入测试规程的场景,共提取2 类典型场景,2 类场景均涉及参与方转弯,与Euro NCAP 2025 路线图中规划的参与方转弯特征一致。同时,从目标物跟踪和预测的角度分析,对车辆感知与决策算法可能有一定的挑战。
3) 通过建立数学模型的方式对场景S11 和S12 进行分析可知,在车辆运动坐标系下,二轮车的运动轨迹仅与车辆和二轮车速度比值相关。不同场景下,二轮车运动轨迹特征差异性较大,在相同场景下,根据速度比值的不同,运动轨迹存在一定差异。
4) 针对场景S11,在设定AEB 触发模型和场景部分元素取值下,仅当 ηvt>0.788 8时,二轮车能够进入车辆AEB 触发域。若将视场角FoV 从60°增大到90°,可有效改善AEB 触发效果,二轮车进入触发域时对 ηvt范围的要求从 (0.788 8,+∞)增加至(0.203 3,+∞)。与此同时,若要车辆AEB 具有最佳的触发效果,则需 ηvt>(Δv-1.12)/1.88 >0.788 8,随着相对运动速度 Δv增 大, ηvt需要进一步提高。
5) 针对场景S12,在设定AEB 触发模型和场景部分元素取值下,当 0 <ρtv≤1.1时,车辆AEB 具有较好的触发效果。同时,当1.1 <ρtv<(Δv+2.46)/9.64时,仍能保持较好的触发效果,由于二轮车进入AEB 触发域后离开触发域,存在一定误判的可能性。将触发宽度w从 1.5 m扩 大至 2 m,若要二轮车运动轨迹从左侧或者前侧进入触发域后,始终保持在触发域内, ρtv取 值范围从 (0,1.1] 增加至( 0,1.36],增加触发宽度w对AEB 触发效果的改善幅度不大,且会增加AEB 误触发的可能。
本文采用数据建模的方法对典型场景S11 和S12 下AEB 的触发情况进行分析,为场景的定性分析和定量分析提供参考,同时为AEB 系统的优化方向提供技术支撑。
致谢感谢国家市场监督管理总局缺陷产品管理中心对本文研究工作的支持。
