基于改进重复自抗扰控制的永磁同步电机谐波抑制*
2023-02-04邱凌烽黄煜昊
邱凌烽,杨 凯,杨 帆,黄煜昊
(华中科技大学电气与电子工程学院,武汉 430074)
0 引言
永磁同步电机(PMSM)具备效率高、输出转矩大、调速范围广等特点[1],在工业领域中得到了广泛的应用。然而,由于加工误差、齿槽效应等因素,会引起电机气隙磁场畸变,进而产生反电势谐波[2-3]。此外,逆变器死区时间、开通关断延迟时间、导通压降等非线性因素会导致输出电压谐波[4-5]。上述谐波最终都会作用到电机中,引入电流谐波以及转矩脉动,影响电机的运行性能。
当前,谐波扰动的抑制方法主要分为两类。第一类是基于控制器的方法,例如谐振控制[6-7]、重复控制(RC)[8-9]和迭代自学习控制(ILC)[10-11]。ABOSH等[7]将谐振控制器(PIR)和比例积分(PI)调节器结合应用于直接转矩控制,以减少二阶和六阶转矩及磁通谐波。刘春芳等[9]将分数阶比例积分微分(PID)调节器和RC结合,利用分数阶PID的高控制自由度,改善系统综合性能。LIU等[11]将ILC和自适应滑模控制器结合,借助ILC补偿滑模控制器以消除抖振,系统鲁棒性显著提升。
第二类是基于扰动前馈的抑制方法[12-15],主要思路是利用观测器对谐波扰动进行估计和补偿。在这些方法中,ADRC因其实现方法简单和动态性能良好等优点而受到越来越多的关注。ADRC是一种复合控制器,包括微分跟踪器、误差反馈控制律、扩张状态观测器(ESO)[13-14]。其主要思路是将串联积分模型作为标准模型,并将一切与标准模型相异的未建模部分以及其它不确定因素视为一体,统称为集中扰动,并将其扩张为一个独立状态,建立扩张状态观测器进行观测,对其实时估计补偿即可将扰动消除。即使永磁同步电机的参数发生变化,ADRC仍能很好地适应。但是,传统的ADRC只能有效抑制其带宽内部的扰动,当谐波扰动的频率超出其带宽,扰动估计的精度会大幅下降[15]。
针对以上问题,考虑到由逆变器非线性引起的是谐波扰动,而重复控制技术是一种补偿谐波扰动的有效方法[16-17]。因此,文中在电流环中将重复控制器与LADRC控制器结合,利用重复控制器在谐振频率处的高增益特性抑制电流谐波扰动,从而提升了传统自抗扰控制器的谐波抑制能力。同时,该方法保留了传统自抗扰控制器的参数鲁棒性和指令跟踪性能。通过PMSM驱动系统实验平台验证了所提方法的有效性。
1 PMSM模型和逆变器非线性
1.1 PMSM的模型
假设PMSM是对称的,忽略磁路饱和、磁滞损耗和涡流损耗,那么PMSM在同步旋转坐标系内的电压方程[18]可以描述为:
(1)
式中,ud和uq分别为d、q轴电压;id和iq分别为d、q轴电流;ωe为电角速度,rad/s;ψf为永磁体磁链;R为定子电阻。
1.2 逆变器非线性
实际逆变器存在死区时间、开关管物理特性(存在管压降和导通/关断时间)等非线性因素,因此输出电压存在畸变。基于绝缘栅双极型晶体管(IGBT)的三相电压源型逆变器和PMSM负载的典型拓扑如图1所示。定义电流正方向为逆变器流向电机定子的方向。
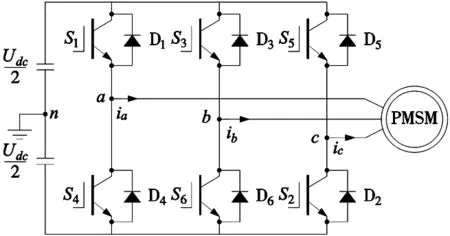
图1 PMSM驱动拓扑

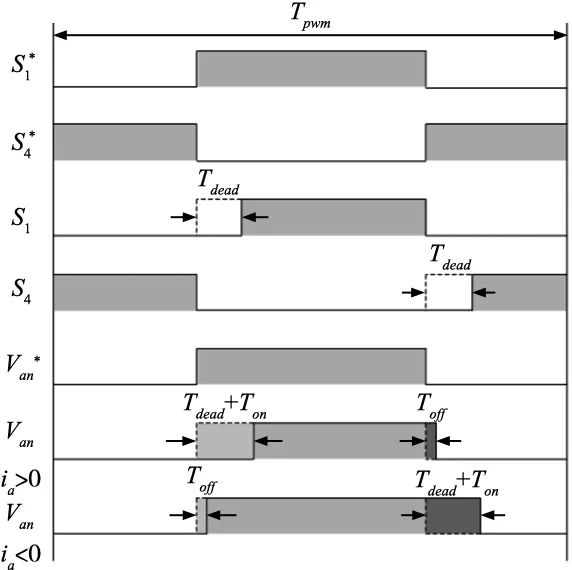
图2 A相桥臂开关管门级触发信号和输出电压波形
可以看出,在死区时间内,同一桥臂的上下开关管都处于关断状态,电流流过开关管的反向并联二极管。此时,尽管死区时间很短,但仍会导致输出电压波形畸变。除了死区时间的影响外,开关管导通/关断时间、导通压降和二极管导通压降都会进一步恶化输出电压波形。
在一个开关周期内,由逆变器非线性引起的电压误差随相电流极性的变化而变化,可推导出ΔVeA表示为:
ΔVeA=Vdeadsign(ia)
(2)
(3)
(4)
式中,Tdead、Ton、Toff、Tpwm和Vdc分别为死区时间、导通时间、关断时间、开关周期和直流母线电压。
与此类似,B相和C相的电压误差可以描述为:
(5)
将误差电压变换到旋转d-q坐标系:
(6)
可见,d-q坐标系下的误差电压包含±6k次谐波分量,而±6k次d-q轴谐波电压注入到电机中将会导致±6k次d-q轴谐波电流:
(7)

上述分析表明,逆变器非线性主要在d-q坐标系下产生±6k次谐波。
2 线性自抗扰控制器
2.1 PMSM的状态方程
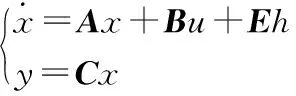
根据PMSM的数学模型,采用最大转矩电流比控制(MTPA)策略,在d-q坐标系下PMSM的状态方程可描述为:
(8)
式中,ωr为机械角速度;pn为极对数。
2.2 LADRC电流环
以q轴为例设计LADRC电流环。根据PMSM的状态方程,q轴电流方程可以写成:
(9)
式中,fiq为总扰动;b0=1/Lq。
令x1=iq,x2=fiq,u=uq,则式(9)可以写为:
(10)

线性扩张状态观测器(LESO)设计为:
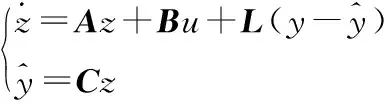
(11)
式中,L=(β1β2)T。
所设计的LADRC电流环结构如图3所示。
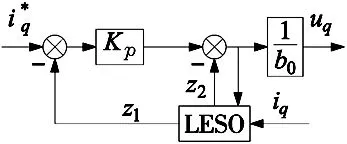
图3 LADRC电流环
LADRC的参数调整方法为[19]:
(12)
理论上,LESO的带宽越大,总扰动的收敛速度越快。然而,受系统噪声和采样频率的限制,实际应用中通常选取ωov=5~10ωcv。d轴电流环的设计方法与q轴类似。
2.3 估计误差分析
用式(11)减去式(10),可以得到误差状态方程:
(13)
式中,e1=z1-x1;e2=z2-x2,可以推导出从fiq到e2的干扰估计误差传递函数为:
(14)
图4为干扰估计误差传递函数的Bode图。可以看出,其幅频特性在低频处有较大的衰减,而在中高频处,其增益为1,说明LESO只能准确观测其带宽ωov内的扰动,对于高频谐波扰动,观测误差会显著增加。同时,可以发现增加LESO的带宽ωov可以减少观测误差,但是带宽的增加也会使其噪声抑制能力下降,在实际应用中通常需要在谐波抑制能力和噪声抑制能力之间折衷选取。因此,寄希望于通过提高LESO的带宽来提升其谐波抑制能力是难以实现的,需要对传统LADRC进行改进。
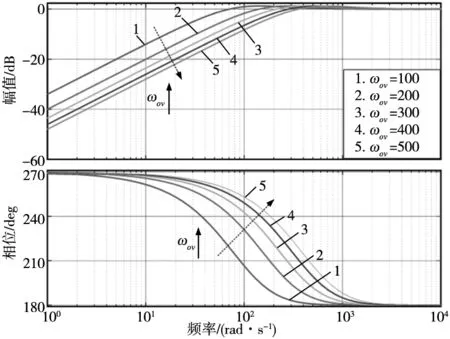
图4 Ge2q(s)的Bode图
3 改进重复自抗扰控制
根据上述分析,传统LADRC难以有效抑制由逆变器非线性等因素引起的谐波扰动,因此文中提出了一种基于改进重复自抗扰控制器的控制方法,将重复控制融入自抗扰控制中,以提升传统LADRC谐波抑制能力。
3.1 重复控制
重复控制器的基本结构如图5所示。
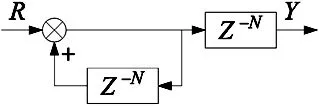
图5 重复控制器的结构
其传递函数可以表示为:
(15)
式中,N为一个基波周期的采样次数。
在频率为2nπ/T(n=1,2,…)的情况下,其开环增益无穷大,干扰的稳态误差为0。然而,由于理想重复控制器会引入N个位于单位圆上的极点,使系统处于临界稳定的状态[20],容易致使系统失稳,因此RC无法直接应用,需要对其进行优化。
3.2 改进的重复控制
为了保证系统的稳定性,需要在理想RC中加入补偿器Q(z)和C(z)。改进的重复控制器(RRC)结构如图6所示。

图6 改进重复控制器的结构
为了简化控制器结构,Q(z)选取为小于1的常数,而C(z)对RC的性能有极大的影响,设计为:
C(z)=krzk
(16)
根据图6,可以得到误差和输入信号之间的传递函数为:
(17)
系统稳定的条件是闭环极点位于单位圆内部:
|Z-N|=|(Q(z)-C(z)P(z))|<1
(18)
将z=ejωT代入式(18)得:
|Q(ejωT-C(ejωT)P(ejωT))|=|H(ejωT)|<1
(19)
通过式(19)的几何意义来研究其稳定性,如图7所示。
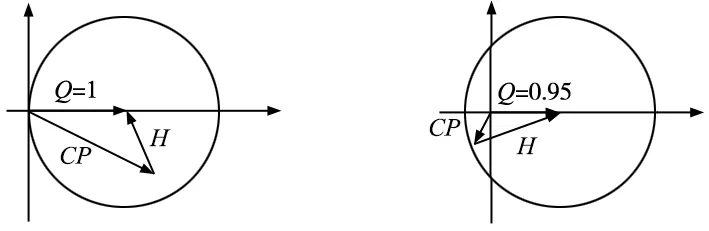
图7 带C补偿器的频率响应矢量图 图8 带Q补偿器的频率响应矢量图
可以看出,在中频和低频下,相位误差小,并且可以通过幅值和相位补偿器C(z)来稳定。然而,在中高频时,由于模型不准确,CP可能达到-90°,H会超出稳定范围。所以选取Q=0.95,使圆心向左偏移0.05个单位,这样可以有效提高系统的稳定性,如图8所示。
假设输入信号是周期性的:zNR(z)=R(z)和Q(z)=1。则可以得到式(20)。
zNe(z)=H(z)e(z)
(20)
上式表明,这一周期的误差为上一周期的1/H(ejωT)倍。将z=ejωT代入式(17)可以推导出稳态误差为:
(21)
假设Q=0.95,并且C(z)可以完美地补偿系统的相位,则可得CP=kr。式(21)转化为:
(22)
上式表明,kr会影响稳态误差,但主导因素仍然是Q(z)。
3.3 改进重复自抗扰控制器
基于上述分析,将改进的重复控制与LADRC结合,提出改进重复自抗扰控制器,并建立PMSM矢量控制系统,具体结构如图9所示。其中,速度环由LADRC控制,电流环由RC-ADRC进行控制。
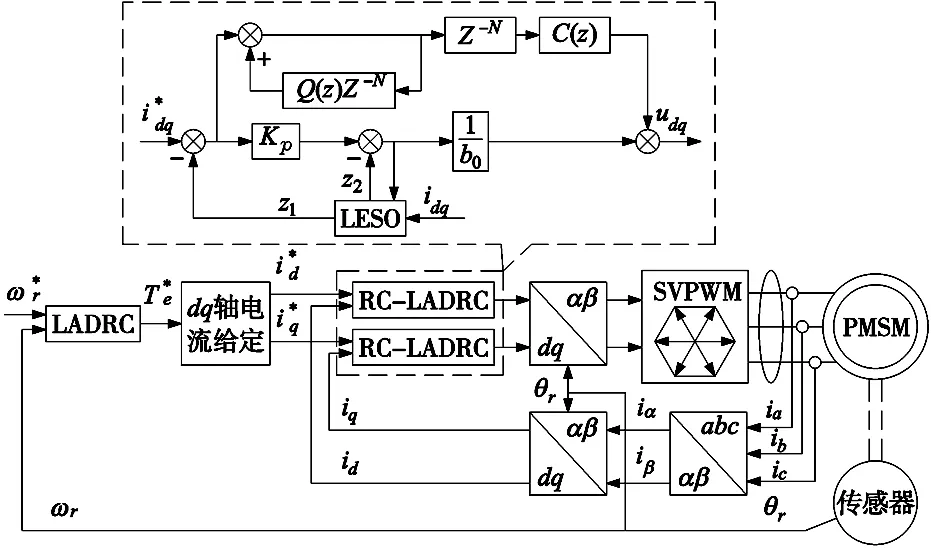
图9 永磁同步电机改进重复自抗扰控制系统结构
采用MTPA的控制策略。通过传感器采集电机转速并反馈至转速环,经过转速环LADRC后产生id和iq参考值。PMSM三相定子电流ia、ib、ic经过Clarke和Park变换后得到电流环的id、iq反馈值,经过电流环重复自抗扰控制器后输出Ud、Uq,通过反Park变换后经由空间矢量脉宽调制产生6路PWM信号输入至逆变器。
4 实验结果与分析
为了验证所设计方法的有效性,搭建了如图10所示的电机对拖实验平台。电机控制算法通过Simulink搭建完成后,经由ControlDesk软件下载至dSPACE MicroLabBox实时仿真机进行实现。其中,dSPACE控制器通过调制板连接到逆变器,PWM开关频率设置为10.8 kHz,逆变器的死区时间设置为5 μs,直流母线电压设置为200 V。实验中的PMSM参数如表1所示。
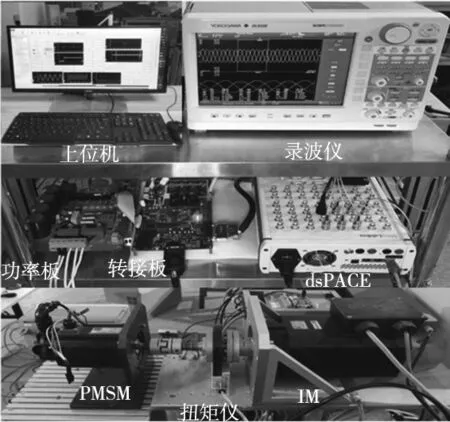
图10 实验平台
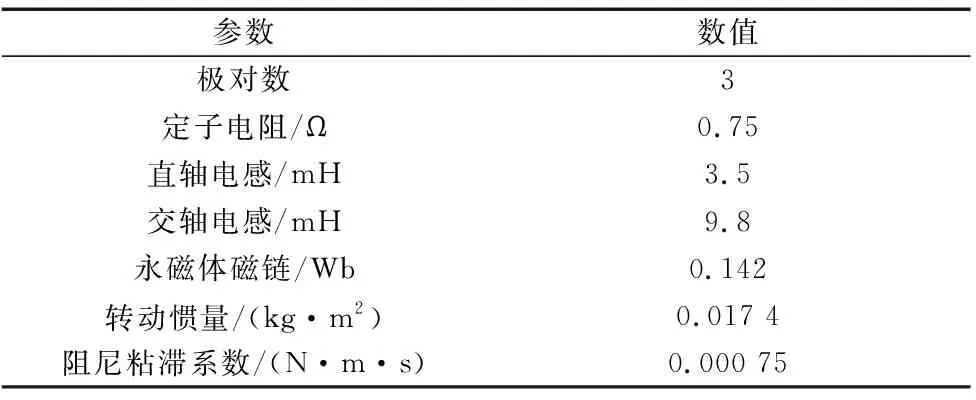
表1 PMSM的参数
为了凸显RC-ADRC较传统ADRC在谐波扰动抑制能力方面的优势,设置了一系列对照实验。对照组的转速环和电流环均采用传统ADRC,实验组的电流环则改为RC-ADRC。分别进行了在600 rpm,2 N·m;600 rpm,5 N·m;900 rpm,2 N·m三种工况下的稳态对照实验,以及转速从300 rpm增加到1500 rpm的动态实验。
图11为ADRC与RC-ADRC控制方式下,电机运行在600 rpm,2 N·m负载时的d、q轴电流、相电流及其频谱分析对比。结果显示,传统ADRC控制下的id、iq脉动峰峰值分别为0.76 A、0.20 A,相电流畸变明显;在使能RC-ADRC后,id、iq脉动峰峰值变为0.53 A、0.15 A,分别降低30.26%、25%,相电流正弦度提升。FFT分析可得,id、iq的6次谐波在使能RC-ADRC后显著减小,而直流分量不变,相电流的5、7次谐波也有明显降低,THD减小。
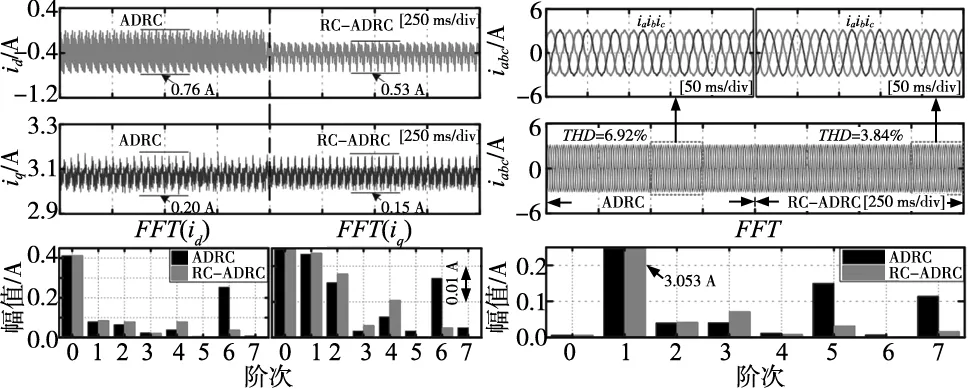
图11 iabc,id,iq波形及其频谱分析(600 rpm,2 N·m)
同时,ADRC与RC-ADRC在其他工况下的谐波抑制能力也进行了对比。图12为电机运行在600 rpm,5 N·m负载工况下的实验结果。结果显示,传统ADRC控制下的id、iq脉动峰峰值分别为1.3 A、0.5 A,相电流畸变明显;在使能RC-ADRC后,id、iq脉动峰峰值变为0.68 A、0.3 A,分别降低47.7%、40%。同时id、iq的6次以及相电流的5次、7次谐波成分显著减小,相电流的THD减小,正弦度提升。可见,在重载条件下的RC-ADRC谐波抑制效果比轻载工况更好。
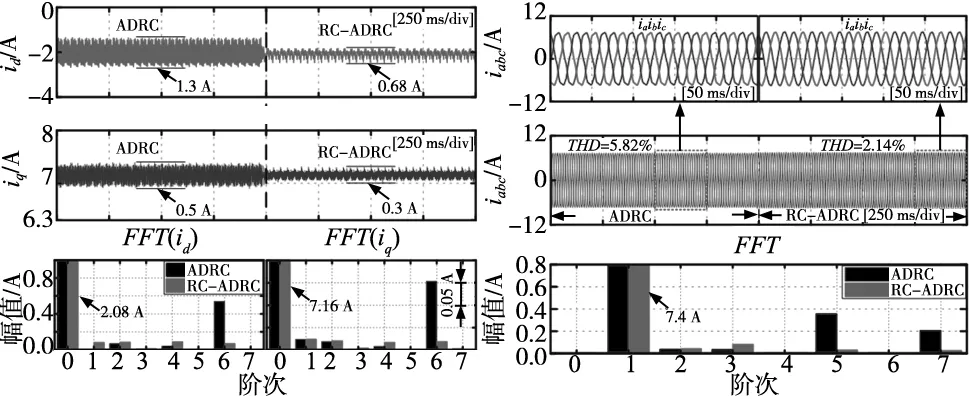
图12 iabc,id,iq波形及其频谱分析(600 rpm,5 N·m)
图13为电机运行在900 rpm,2 N·m负载工况下的实验结果。可以看到,在900 rpm,2 N·m工况下,传统ADRC控制下的id、iq脉动峰峰值分别为1.3 A、0.38 A,相电流畸变明显;在使能RC-ADRC后,id、iq脉动峰峰值变为1.25 A、0.29 A,分别降低3.85%、23.68%。可见,在高速下RC-ADRC的谐波抑制能力有所下降,但仍然较ADRC的谐波抑制能力有所提升。
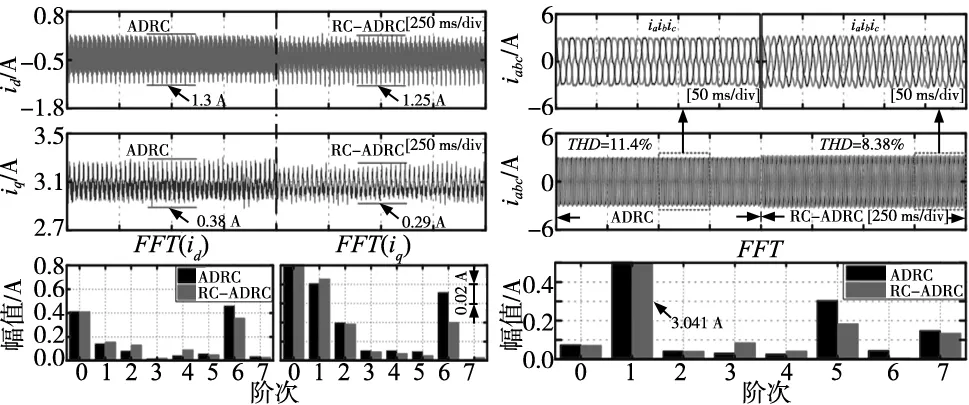
图13 iabc,id,iq波形及其频谱分析(900 rpm,2 N·m)
图14为电机转速从300 rpm增加到1500 rpm时,d-q轴电流和相电流的变化过程。结果显示,d-q轴电流和相电流无明显畸变,过渡过程稳定,表明RC-ADRC的动态性能良好。
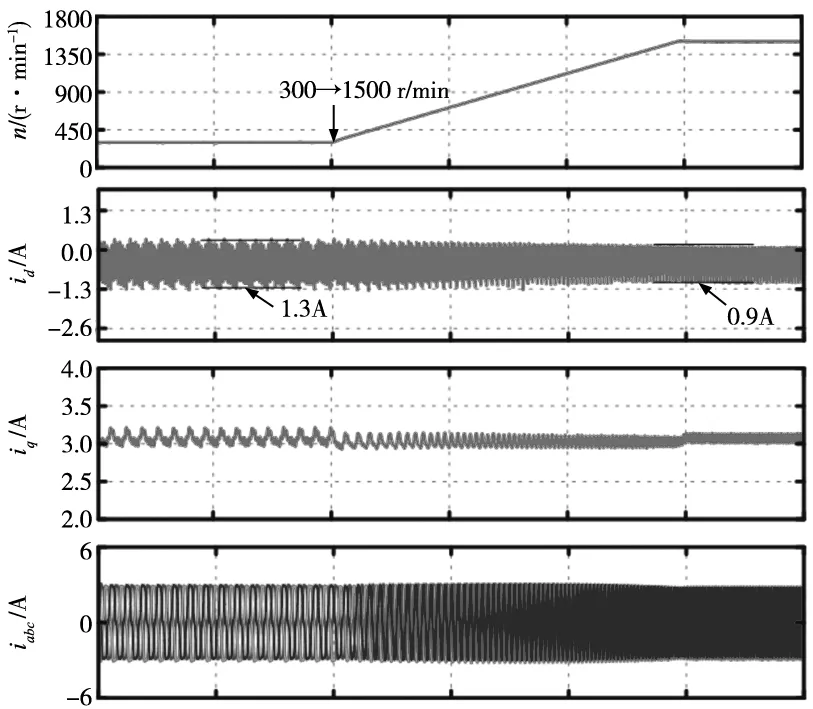
图14 iabc,id,iq波形的动态过程(300~1500 rpm)
综上所述,RC-ADRC在多个负载/转速工况下的谐波抑制能力以及动态性能均得到了有效验证。
5 结论
针对传统ADRC由于带宽限制而无法有效地抑制由逆变器非线性等因素引起的谐波,提出了一种结合重复控制和ADRC的改进重复自抗扰控制器。通过搭建PMSM驱动系统实验平台验证了所提出的控制方法的有效性,最终得出结论如下:
(1)针对ADRC无法有效抑制有逆变器非线性等因素引起的谐波扰动的问题,在电流环中引入重复控制器与其并联,利用RC在谐振频率处的高增益特性抑制谐波扰动。
(2)动态实验证明,RC-ADRC继承了传统ADRC的参数鲁棒性和动态性能,控制性能良好。
(3)稳态实验证明,在多负载/转速的工况下,RC-ADRC相对于传统ADRC的谐波抑制能力均有显著提升,由逆变器非线性引起的±6k次电流谐波得到了有效抑制。
