基于参数化恒导纳方法的多逆变器仿真建模与优化
2023-02-02楼冠男蒋啸宇
楼冠男,蒋啸宇,顾 伟,张 靖,曹 阳,李 珂
(东南大学电气工程学院,江苏省南京市 210096)
0 引言
随着高密度分布式电源的大量接入,具有高频特性的电力电子器件数量大幅增加,这在多换流器系统中的体现尤为明显。在各类换流器中,逆变器因在新能源发电中的广泛应用而受到关注,其仿真研究一直是电力系统仿真分析中的关键点[1]。作为模拟检验系统运行的重要手段,仿真的效率与精度应当满足目前大规模电力系统的需求。多逆变器系统作为常见的仿真模块,其运行速度直接影响了系统整体的仿真效率。因此,如何在系统建模过程中兼顾精度与效率,成为众多研究关注的重点。
对此,许多研究从开关模型入手,提出代替理想开关的模型并应用于逆变器仿真中,其中,典型的包括 二 值 电 阻 模 型[2-4]、电 感/电 容 恒 导 纳(LC)模型[5-7]、平均化模型[8-11]等。二值电阻模型被用于仿真软件PSCAD 中,具有良好的精度与暂态性能,但在状态切换时需重新计算导纳矩阵,增加了仿真负担。LC 模型广泛应用于RT-LAB、实时数字仿真器(RTDS)等软件[12-16],模型保证了状态切换时导纳矩阵的恒定,提升了仿真效率,但等效的电感和电容因储能特性会产生不可忽略的暂态波动[17]。平均化模型大幅提高了仿真效率,在低频运行时效果较好,但高频条件下,仿真精度有所下降。恒导纳模型仿真速度快且精度也满足基本要求,相关的建模研究受到了关注。文献[18-20]提出了一种响应匹配的恒导纳方法,通过参数的选取,减缓了暂态波动和功率损耗。文献[21]基于响应匹配恒导纳模型,运用交叉初始化的方法优化了暂态过程,提升了精度。但这类模型分析的对象仅局限于单逆变器系统,未考虑复杂结构下的参数可行性。
此外,部分研究从系统整体结构出发进行建模。文献[22]基于经典LC 等效模型,通过引入正负虚拟电阻缓解数值振荡问题,但该模型在增加电阻时对每个开关引入了新的节点,不利于大规模逆变器系统的高速计算。文献[23]运用传统LC 模型对含有逆变器、升压电路组成的微网进行仿真,具有较高仿真效率,但由于LC 暂态过程,模型精度较低,暂态性能仍有优化的空间。文献[24]采用混合伴随电路法替换非线性元件进行系统建模,提高了系统仿真效率,但该方法中开关参数始终保持恒定,未研究参数对不同系统结构的适用性,精度仍有提升的空间。目前涉及多逆变器精确建模的文献相对较少,本文对此开展进一步研究。
本文在保证精度的前提下,兼顾多逆变器系统仿真的效率问题,从数值稳定性和动态特性两方面进行研究,提出了参数优化方法;同时,引入交叉初始化方法,进一步优化暂态过程,降低了模型误差。本文创新工作如下:
1)构建了基于参数化恒导纳方法的多逆变器模型,研究由多源参数耦合引起的可行域偏移;
2)提出了基于快速遗传算法的参数自适应调整策略,调整系统的仿真参数始终在多目标(收敛速度、波动大小、耦合程度)最优值处;
3)将交叉初始化的方法应用于多逆变器系统,通过逆变桥臂间的交叉赋值进一步削弱暂态波动。
1 逆变器仿真模型
本章主要介绍基于参数化恒导纳方法的多逆变器仿真系统建模过程。系统主要由逆变器、连接阻抗、公共母线3 个部分组成。
1.1 参数化恒导纳方法
目前,电磁暂态仿真的元件建模大多采用EMTP 算法。其中,恒导纳方法的核心是基于离散化理论,将传统电感/电容恒导纳开关等效为恒定导纳和历史电流源并联的形式,其作为小步长仿真开关模型应满足:
1)整个系统的导纳矩阵在运行过程中保持恒定。
2)具有与理想模型相同的特性:稳态时,导通电压、关断电流为零;暂态时,暂态误差迅速衰减至零。
3)外部电路对开关模型的影响较小。
根据上述条件,以后向欧拉法为例,对LC 开关模型进行离散化处理,有
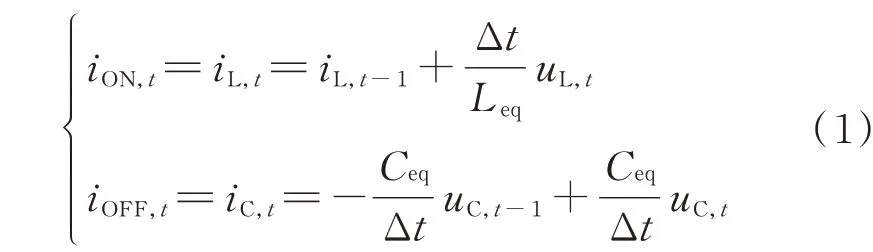
式中:iON,t、iOFF,t分别为导通、关断电流;iL,t、uL,t分别为导通等效电感本步长的电流、电压;iL,t-1为等效电感上一步长的电流;iC,t、uC,t分别为关断等效电容本步长的电流、电压;uC,t-1为等效电容上一步长的电压;Leq、Ceq、Δt分别为开关等效电感值、电容值和步长。
为了满足恒导纳的特性,电压前的系数应当满足如下关系:

式中:Y、YON、YOFF分别为等效导纳、导通等效导纳、关断等效导纳。
若采用其他数值方法,如梯形积分法、改进欧拉法等,则开关上一步长的电压ut-1和电流it-1前的系数(即历史电流源系数)会发生变化。已有研究表明,各类数值积分得到的系数并非最优[19]。为获得最佳的历史电流源系数,需从非物理的角度出发,将开关模型中的电流写成式(3)所示的广义离散化差分形式:

式中:αON、αOFF分别为导通、关断电压系数;βON、βOFF分别为导通、关断电流系数;uON,t-1、iON,t-1分别为上一步长的导通电压、电流;uOFF,t-1、iOFF,t-1分别为上一步长的关断电压、电流。
为确定系数的值,需使开关模型满足一定的稳态和暂态特性。首先,将式(3)中的uON和iOFF作为输出,进行Z 变换,得到式(4):

根据离散系统Z 变换的终值定理,为使该模型的导通电压和关断电流为0,有αON≠-1,βON=1,αOFF=-1,βOFF≠1。αON和βOFF的具体值需通过对系统整体建模并作暂态分析确定。
1.2 多逆变器系统建模
多逆变器系统的可变参数主要为αON和βOFF。为描述方便,在后续章节中略去参数αON和βOFF的下标。为简单起见,分析时忽略逆变桥臂的死区时间,即任一桥臂正常工作时只有上通下断和上断下通两种运行状态。
首先,分析系统中每个逆变器的参数化模型,运用参数化恒导纳方法建模,可得图1 所示的基于参数化恒导纳开关模型搭建的逆变器电路模型。
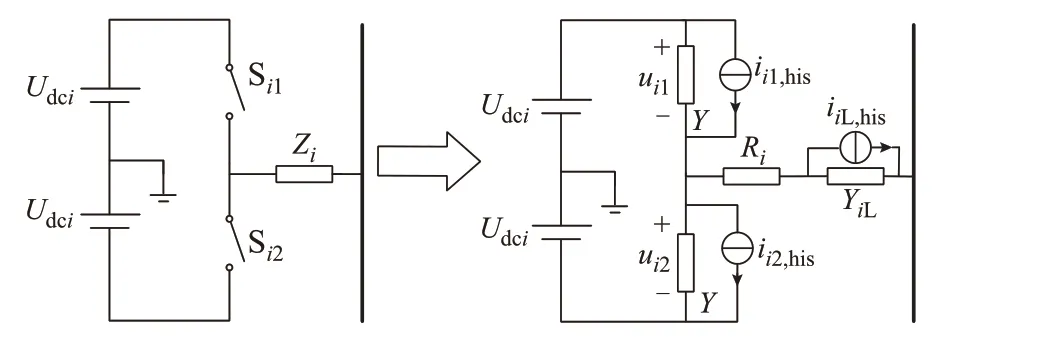
图1 逆变器的参数化建模Fig.1 Parameterized modeling of inverter
图1 中:Si1、Si2分别表示逆变器i的上下桥臂开关;Zi为线路阻抗;Ri为线路电阻值;Udci为直流输入电压;ii1,his、ii2,his、iiL,his分别表示上、下桥臂开关和线路电感对应的历史电流源的电流;YiL表示线路电感的等效导纳。开关等效导纳值Y的选择与LC 模型的等效电感、电容及仿真步长有关[18]。为便于建模与计算,导纳值一般选择为1。以Si1导通、Si2关断为例,建立其离散系统的状态空间表达式如下:
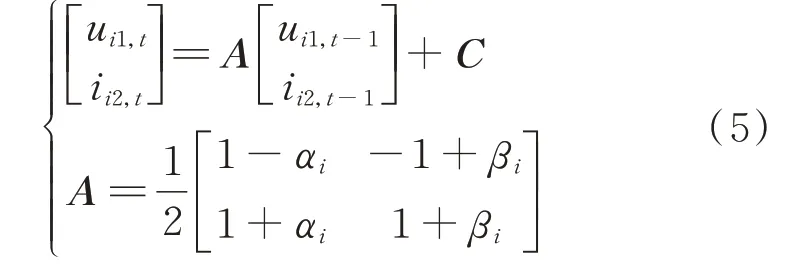
式 中:ui1,t、ui1,t-1分 别 为 逆 变 器i本 步 长 和 上 一 步 长的上桥臂电压;ii2,t、ii2,t-1分别为逆变器i本步长和上一步长的下桥臂电流;αi和βi为逆变器i的历史电流源系数;A为系统的状态矩阵;C为与直流输入相关的常数矩阵,对暂态性能无影响。同理,可以推导出Si1关断、Si2导通时的状态矩阵,其特征值与Si1导通、Si2关断情况下相同。多个逆变器并联时,由于逆变器间的耦合关系及连接阻抗的存在,基于节点电压法推导的状态空间将会发生变化,进而导致系统的参数可行域改变。以两个逆变器为例,建立如附录A 图A1 所示的双逆变器结构图。逆变器按各自参数α1、β1和α2、β2运行,以上通下断为例,建立双逆变器系统的状态空间表达式如下:


式中:各变量的下标中第一位表示逆变器编号,第二位1、2 分别表示上、下桥臂,L 表示电感支路;状态矩阵A如式(7)所示。
式 中:k1=L1/Δt、k2=L2/Δt、m=k1+k2+R1+R2+1为与双逆变器各自的线路阻感R1、L1、R2、L2及仿真步长Δt有关的参量;M1=2m-1;M2=2m+1;K1=2m-2k1-1;K2=2m-2k2-1。对于上断下通的情况,其状态矩阵的特征值与上通下断的相同。
当逆变器数量进一步增加时,其建模方法与双逆变器系统一致,上通下断时,其通式如式(8)所示。

式 中:Xi,t、Xi,t-1分 别 为 逆 变 器i本 步 长、上 一 步 长 的状态向量,包括上桥臂电压ui1、下桥臂电流ii2和线路电感电流iiL;Aij为三阶方阵,矩阵中元素由系统中的线路阻感值、仿真步长共同决定。因此,在不同场景下,其状态矩阵存在很大差异,进而影响系统稳定性能。下章将基于状态空间法进行稳定性分析。
2 多逆变器系统模型的数值稳定性
本章以双逆变器系统为例,分析系统的数值稳定性。根据离散系统收敛理论,当状态矩阵谱半径小于1 时系统能够稳定,且谱半径越小,收敛速度越快。双逆变器系统的状态矩阵(见式(7))与单逆变器系统(见式(5))差异较大。为简化分析并直观地展示稳定域与谱半径最小值对应参数,令α1=α2=α、β1=β2=β,并用等高线图表示谱半径关于参数α和β的关系。分别根据状态矩阵,绘制不同线路参数下系统的稳定域(即谱半径为1 的等高线)及最小谱半径点变化图,如图2(a)所示,其中,R1=R2=R,L1=L2=L,星号表示对应的最小谱半径点。
由图2(a)可见,稳定域及最小谱半径点需要由逆变器数量、线路参数共同确定。结合图2(a)和式(5),对于单逆变器系统,状态矩阵A在稳定域内存在两个谱半径为零的点,分别为α=-0.414,β=-2.414 和α=2.414,β=0.414,采用这两组参数可使暂态过渡时间最短。同样,结合图2(a)黑色线条对应场景和式(7),可得该线路下多逆变器系统的最小谱半径对应的参数为α=3.99 9,β=0.142 2,最小谱半径为0.464 8。通过该方法可初步确定历史电流源中的系数α和β。基于谱半径的稳定性分析方法同样适用于逆变器数量进一步增加的情况。

图2 不同场景下的稳定域对比Fig.2 Comparison of stability regions in different scenarios
根据双逆变器系统的状态矩阵式(7),谱半径与逆变器各自输出线路阻感参数R1、L1、R2、L2及仿真步长Δt密切相关。在计算谱半径时,需先计算矩阵所有特征值,并取最大绝对值,无法通过矩阵元素直接列式计算。对于高阶含参矩阵,由于计算其谱半径时需要考虑大量可变参数,直接导出谱半径关于线路参数的表达式、量化具体稳定域有一定困难。因此,本章通过图片的形式分析线路阻感参数对稳定域的影响,并在第3 章寻优部分采用遗传算法进行参数寻优。
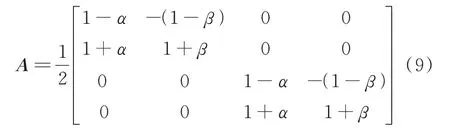
由图2(a)可得,单逆变器情况下稳定域内β的最小值约为-5.84。图2(b)展示了双逆变器系统稳定域下边界点随线路参数R、L的变化趋势图。随着线路参数增大,稳定域下边界βmin沿R方向和L方向均呈下降趋势,即稳定域皆沿β轴负方向扩大,且当电感增大至0.5 mH 数量级时,稳定域随线路电阻变化程度大幅减小。当线路阻感增至无穷大时,其状态矩阵近似为式(9),这种情况相当于逆变器脱网独立运行。由于该矩阵特征值和单逆变器系统相同,稳定域与单逆变器系统一致。
综上,在线路呈阻性的低压系统中,基于参数化恒导纳开关模型搭建的逆变器从单台逆变器独立运行切换至多台逆变器并联运行时,稳定域与最小谱半径位置会发生变化。因此,在运用参数化恒导纳方法进行多逆变器建模时,应当充分考虑由多源耦合产生的参数偏移问题,实时对参数进行调整。
3 多逆变器系统模型的暂态特性
本章提出一种基于快速遗传算法的参数寻优方法以确保参数实时运行在多目标最优处,同时应用交叉初始化方法削弱暂态波动。参数优化策略不仅能保证系统在多种场景下稳定运行,而且可以提升系统仿真全过程的动态性能。
3.1 多目标优化
优化目标包括暂态性能与解耦性能。暂态性能体现在系统快速平稳地收敛,包含暂态的收敛速度与暂态波动的大小。收敛速度指标为第2 章详细分析的谱半径ρ,暂态波动则需根据开关切换前的状态量进行迭代计算。解耦性能体现在逆变器之间的交互影响。
1)暂态波动指标
假定逆变器由上断下通切换至上通下断,则后一状态逆变器i的上桥臂电压ui1和下桥臂电流ii2应为0,可根据前一状态稳态值计算波动为:
式中:δiU、δiI分别为电压、电流波动指标;Δui1,t、Δii2,t分别为上桥臂电压、下桥臂电流波动量;U为电压输入值;hi为线路参数系数,表达式见式(11)。

式中:Yi为线路的导纳值;YL为负载的导纳值。由于负载导纳往往远小于线路导纳,hi的值接近0,暂态波动主要受参数α的影响。
对于多个逆变器,以其中最大的波动作为优化目标。由于电压、电流波动是同等效应的,取其平均值作为暂态波动指标δ(如式(12)所示),并要求其尽可能小。

2)耦合度指标
耦合度指标反映了各逆变器之间的相互作用关系。在系统运行时,应当保证个别逆变器投切时,全系统受到的影响最小。具有n个逆变器的系统状态空间表达式为:
3)综合优化
由于多逆变器系统的最快收敛、最小波动、最优耦合条件下对应的参数αi、βi并不一致,综合考虑上述指标可得多逆变器系统的优化目标J为:

该指标是在稳定域内3 个指标各自归算至0-1范围内后再取平均值。λ1、λ2、λ3表示各目标权重,可根据系统对各目标的需求进行调整。J越小时,多逆变器的综合性能越好。考虑到稳定性是仿真中需要首先保证的,本文取λ1=0.5,λ2=λ3=0.25。
3.2 参数调节策略
为提高系统的暂态性能,参数调节系统在个别逆变器投切或正常运行时,间隔一定时间读取线路参数建立状态空间,采用快速收敛的混合遗传算法[25]搜索多目标的最优参数α和β,并用算法结果修正逆变器参数。主要步骤如下:
1)参数调节系统读取线路阻感参数并生成状态矩阵,根据第2 章及3.1 节的内容计算目标函数;
2)快速遗传算法寻优:采用12 位二进制数分别对变量α、β编码,设定每代群体规模为300,采用单点交叉的方法,交叉概率设为0.8,变异概率设为0.12,在寻优过程中,通过遗传算法确定初始解及搜索方向,并使用Nelder-Mead 单纯形法进行搜索,对参数进行寻优;
3)将快速遗传算法得到最优解重新赋给逆变器系统,实现参数的调整。
由于遗传算法在多变量情况下会进入局部最优的情况,本文主要考虑两个变量寻优的情况,包括3组逆变器采用相同α、β参数或两组逆变器参数确定,一组待定的情况。以第1 种情况为例,部分典型配电线路阻抗参数下的优化过程如附录A 图A2 所示(实线为快速收敛算法,虚线为传统算法),其中,线路具体参数见附录A 表A1。
以线路参数1 为例。通过22 次混合计算可得,最优参数为α=0.261 4,β=0.494 1,此时对应的目标函数为0.376 1。在仿真过程中,该优化策略通过对系统状态空间的计算与对α、β的赋值,可以保证系统在多目标最优参数下运行。
3.3 交叉初始化方法
交叉初始化也是削弱暂态波动的方法,其原理是在状态切换瞬间上下桥臂交叉赋值。以上断下通切换至上通下断为例,状态切换后,逆变器i的上桥臂电压和下桥臂电流误差初始值如式(17)所示:
式中:Udci为逆变器i直流侧电压;UO为输出电压。
在不做任何削弱暂态误差初值处理的情况下,每次状态切换时,初始电压、电流值与理想值之间有较大偏差。交叉初始化方法的核心是在状态切换时,用另一桥臂前一状态的电压、电流稳态值计算本桥臂状态切换时刻的历史电流源ii1,his,t、ii2,his,t,即:

采用交叉初始化的方法对历史电流源进行修正,逆变器i状态切换后初始的修正值为:

通过比较式(17)和式(19),在引入交叉初始化后,状态切换时刻的初始误差降低。同理,可得运行状态由上通下断切换至上断下通后的暂态误差值也减小。引入交叉初始化的方法属于逆变器结构优化,与前文基于最小波动的参数优化并不矛盾,该方法能够进一步提高系统的暂态性能。
在仿真过程中,参数调节系统间隔一定时间或在个别逆变器投切时读取各逆变器的线路参数,计算多目标函数,并运用快速遗传算法得到最优α、β参数进行调整。在此基础上,通过桥臂中的交叉初始化,进一步削弱暂态过程波动。
4 仿真验证
本文的仿真平台基于Simulink 搭建,处理器型号为AMD Ryzen7-3700X,核心数为8,主频为3.59 GHz。建立了图3 所示多逆变器系统仿真算例,其中:逆变器直流侧接1 kV 直流电压源,交流侧输出峰值为±500 V 的交流电压,交流侧负载为10 Ω电阻。开关驱动信号占空比为50%,频率为2 kHz。开关S1、S2导通电阻为10-6Ω,关断电阻为106Ω。仿真步长为1 μs,仿真时长为10 s。

图3 仿真算例拓扑结构Fig.3 Topological structure of simulation cases
1)算例1:稳定性能对比
该算例对具有参数调节与无参数调节的系统进行稳定性对比。初始参数设置为:R1=R2=0.1 Ω,α1=α2=-0.4,β1=β2=-1.2。S1闭合时间为0.5~1.5 s,S2始终断开。有无参数调节的系统的并联点、开关S1两端电压波形对比见图4。增加参数优化策略后,逆变器参数自适应调整为多目标最优处:α1=α2=-0.703 6,β1=β2=0.264 7,系统在并联后仍然能够保持稳定。而对于没有参数调节策略的系统,在并联后,输出电压明显发散。
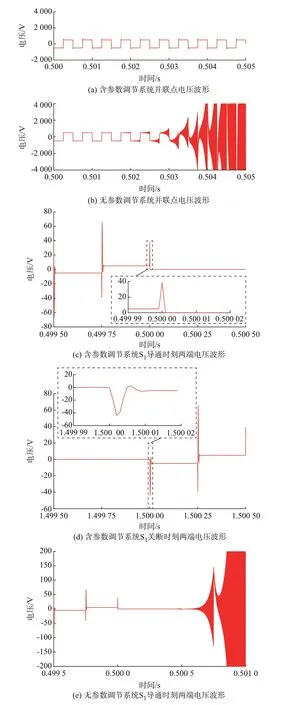
图4 双逆变器并联时系统电压对比Fig.4 Comparison of system voltage when two inverters are connected in parallel
对于线路参数变化的场景,S1始终闭合,S2始终断开,预设参数α1=α2=-0.4,β1=β2=-1.1。当系统运行至1 s 时,逆变器1 的输出线路参数发生变化,该过程伴随着稳定域的缩小,预设逆变器参数不再适用于线路参数。如附录B 图B1 所示,在具有参数调节功能的系统中,逆变器参数自适应调整为多目标最优处:α1=α2=0.244 1,β1=β2=0.149 4,没有出现失稳问题。而在没有参数调节策略的情况下,系统发生失稳。
根据仿真结果分析,采用参数优化的模型有效地避免了因多源耦合产生的失稳问题。
2)算例2:各指标动态性能对比
该算例为3 个逆变器并联模型,分别验证了采用最快收敛参数、最小波动参数对系统输出波形的影响。系统线路参数为:R1=0.1 Ω,L1=0.1 mH;R2=0.2 Ω,L2=0.2 mH;R3=0.15 Ω,L3=0.12 mH。对比结果如附录B 图B2(a)所示,不同参数调整策略下各目标值见附录B 表B1。
附录B 图B2(b)展示了两个逆变器并联运行期间,第3 台逆变器采用最小耦合度参数连续投切对系统最终输出波形的影响。线路沿用上一段中提及的参数,S1始终闭合,S2分别在0.500、0.502、0.504 s闭合,0.501、0.503、0.505 s 断开。由波形对比可见,采用最小耦合度参数可以削弱新逆变器投切对波形的影响,保持系统输出波形基本不变(逆变器参数α1=α2=1.1,β1=β2=0.1,α3=0.465 0,β3=0.388 0)。
3)算例3:系统整体模型对比
算例采用多目标最优对应的参数并应用交叉初始化方法,较好地处理了暂态过程。S1、S2始终闭合,系统的线路参数为:R1=0.3 Ω,L1=0.4 mH;R2=0.3 Ω,L2=0.2 mH;R3=0.25 Ω,L3=0.1 mH。分别用含初始化最优参数模型、无初始化最优参数模型、传统LC 模型和基于Simulink 库中二值电阻开关模型(理想模型)搭建多逆变器系统并进行对比,其输出电压波形与实时开关损耗如图5 所示,各模型5 s 仿真50 次平均用时如表1 所示。
如图5 所示,通过对比各模型波形以及半个周期内的误差曲线,可知多目标最优参数下的输出电压较传统模型更接近理想开关,且交叉初始化方法进一步改善了精度。图5(f)为单个参数化开关的实时功率损耗,亦可见本文模型大幅削弱了开关损耗,提升了暂态特性。由表1 可知,本文模型相比理想模型仿真速度大幅提升,虽然与传统LC 模型仿真速度接近但具有更好的暂态性能。

表1 各模型仿真平均用时Table 1 Average simulation time of each model

图5 各模型输出电压波形对比Fig.5 Comparison of output voltage waves of each model
4)算例4:并网模型对比
该算例为三相多逆变器系统并网模型,逆变器使用多目标优化的参数并引入交叉初始化方法。交流侧是线电压有效值为380 V、频率为50 Hz 的等效交流电网。逆变器采用PQ控制,有功功率额定值为20 kW,无功功率额定值为0,载波频率为2 kHz。线路参数均为R=0.2 Ω,L=2 mH。对典型仿真步长下传统LC 模型及本文模型并联点电压仿真结果进行对比,结果如附录B 图B3 所示。可以看出,在10 μs 步长下,本文模型仍具有较高精度,且在相同步长下,波形优于传统模型。
为检验模型在更多场景下的通用性,在算例4的基础上,采用5 μs 作为仿真步长,进一步增加并联逆变器的个数或并联逆变器组的数量,并对比各类模型的仿真时长及精度,各场景的20 次5 s 仿真平均耗时见表2,其中:1×4 表示1 组4 个逆变器并联且在不同位置经由小阻抗并网的场景,其他以此类推;各组逆变器间统一存在R=0.5 Ω、L=2 mH 的线路。部分场景下的半个周期内并联点电压误差对比见附录B 图B4,可见本文模型相比于传统模型具有明显的精度优势。

表2 各仿真场景平均耗时Table 2 Average time of different simulation scenarios
通过多个仿真算例运行特性的比较,验证了本文的参数化多逆变器模型有效避免了多源耦合引起的失稳问题,在保留传统恒导纳模型速度优势的前提下,具有更好的暂态性能。此外,本文模型在采用10 μs 仿真步长时仍能保证较高的仿真精度,这就为大规模逆变器系统小步长实时仿真创造了条件。
5 结语
本文基于参数化恒导纳方法,搭建了一种多逆变器模型,并分析了由多源耦合引起的稳定域变化,提出了保持系统运行在多目标最优状态的参数调节策略。在此基础上引用了交叉初始化的方法,进一步优化暂态特性,并将该模型与其他模型进行了仿真比对。仿真结果表明:本模型能够适应多源耦合引起的稳定域变化,且兼顾仿真精度与仿真速度,运行特性接近理想模型。本模型的参数α、β可根据系统结构或优化目标进行调整,通用性高,在电力系统小步长实时仿真中具有良好的应用前景。
为简化分析,本文仅考虑较为理想的逆变器运行状态。后续可针对非理想运行状态,如考虑开关死区、误导通等情况开展进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
