考虑风电低电压穿越过程的频率最低点量化及其提升方法
2023-02-02花赟玥高晖胜辛焕海
花赟玥,吴 琛,黄 伟,高晖胜,辛焕海
(1. 浙江大学电气工程学院,浙江省杭州市 310027;2. 云南电网有限责任公司,云南省昆明市 650011)
0 引言
随着风电等新能源的大量接入,以同步机(synchronous generator,SG)为主导的传统电力系统正在向着电力电子化的新型电力系统转变[1],这将导致系统的惯量、调频能力下降,系统的频率响应特性劣化[2-3]。
在高比例新能源电力系统中,风电机组(wind turbine,WT)在电网发生故障时保持运行并向系统提供支撑的能力逐渐受到重视。目前,已有大量文献对风电的低电压穿越(简称低穿)控制进行研究,主要是针对低穿期间风电机组如何提供无功出力以支撑电网电压[4-5]。而由于风电机组低穿期间一般采用无功优先控制,其有功出力受限。同时,故障切除后其有功功率按给定的较慢速率恢复,以避免机组荷载突然大幅增加[6-7]。可见,该过程中系统将受到持续且非阶跃的有功缺额影响,可能出现频率最低点过低导致保护动作的情况,存在频率失稳风险[8-10]。因此,有必要分析风电机组低穿过程造成的非阶跃扰动下的系统频率响应,量化并提升最低点等频率特征。
在考虑风电机组低穿过程的系统频率响应方面,文献[11-12]揭示了当不参与系统调频的风电机组渗透率越高时,低穿期间频率稳定问题越严重。然而,上述研究都只是定性分析而缺乏对频率最低点等频率稳定关键影响因素的定量计算。关于该问题,文献[13-14]给出了阶跃扰动下频率最低点的经验公式。然而,在风电低穿产生的非阶跃扰动场景下,该经验公式具有局限性。因此,有必要研究风电机组低穿过程系统频率最低点的量化评估方法。
在提升风电机组低穿过程的系统频率稳定性方面,文献[9]提出一种自适应的有功电流注入最大的优化方法,但未考虑机组荷载对有功恢复速率的限值,可能会导致机组机械部分受损。文献[15]提出在直流母线侧加装储能的方法以在低穿期间提供一次调频,但安装储能成本较高。考虑到当系统发生故障时,离故障点较远的风电机组受故障影响小,不会进入低穿状态[8-9],可提供有功支撑。因此,一种更经济、对机组更友好的方式是在保证有功功率恢复速率不太大的情况下,利用未受故障影响的风电机组来支撑频率。
为分析风电机组低穿过程造成的非阶跃扰动下系统最低点等频率特征,并提升频率稳定性,本文首先阐明了在电力系统受到非阶跃扰动的场景下,现有针对阶跃扰动的频率分析方法的局限性;进而,提出了等效设备法,将非阶跃扰动下系统频率响应转化为受到阶跃扰动的等效系统进行分析,并结合阶跃扰动下的经验公式量化频率最低点;其次,利用该方法量化了风电机组低穿过程的频率最低点;进一步,以频率最低点为优化目标,建立了未受故障影响的风电机组调频参数整定的优化模型;最后,通过仿真验证了上述方法和模型的有效性。
1 针对阶跃扰动频率分析方法的局限性
为对系统频率特征进行量化研究,首先需要建立系统的频率响应模型。关于该问题,文献[13-14]通过严格的理论推导,在节点响应频率中分解出共模频率,其表征了系统全局频率的变化趋势。该方法比传统的平均系统频率(average system frequency,ASF)模型和惯量中心(center of inertia,COI)频率理论性更强,适用于新能源电力系统。后文将基于共模频率进行分析。
考虑一个n机电力系统,设各节点的扰动功率为ΔPd,i(s)(可能为非阶跃扰动),则系统的共模频率Δω(s)可表示为[13-14]:
式中:s为拉普拉斯算子;ΔPL1(s)=1TΔPd,其中,1 表示元素全为1 的n维列向量,ΔPd=[ΔPd,1,ΔPd,2,…,ΔPd,n]T;Gi(s)(i=1,2,…,n)为 第i台发电设备 频率-有功传递函数。
基于式(1)(或类似的表达式,如ASF),已有较多学者对系统全局频率的稳定性进行了分析[13-14]。例如,文献[13-14]提出指标来量化功率扰动下系统的频率最低点。需要指出的是,这些研究大多只考虑了扰动为阶跃的形式。这可能是因为实际电力系统常发生此类扰动(如直流闭锁导致的功率缺额),且阶跃扰动相对容易分析。
然而,实际系统中有功扰动的形式可能远比阶跃复杂。例如,2019 年英国“8·9”大停电中,分布式电源、风电场脱网以及汽轮机停机相继发生,且事故过程中还有低频减载等保护动作,可见系统在不同时刻受到多次扰动[16]。又如,本文中考虑的风电机组低穿以及恢复过程,带给系统的有功扰动近似为阶跃和斜坡的组合,详见3.1 节。在这些情况下,如果试图直接将扰动视为阶跃(如在“8·9”大停电中将所有发电机脱网以及低频减载视为同时发生,或忽略风电机组低穿恢复过程中的功率斜坡响应)进行分析,无疑会带来较大的误差。
然而,非阶跃扰动本身形式复杂,若直接利用式(1)解析结果非常复杂,且难以找到直观且简洁的公式去量化评估频率特征。文献[13-14]中提出的频率特征量化方法较为简洁且准确,期望借鉴该方法来分析非阶跃扰动场景。因此,下一章将提出一种等效设备法,将受到非阶跃扰动的原系统转化为受到阶跃扰动的等效系统,进而可利用文献[13-14]的结论来简化分析其频率响应。本文研究是对文献[13-14]所提方法适用范围的推广。
2 非阶跃扰动下频率特征简化分析方法
注意到各节点任意的功率扰动ΔPd,i(s)均可以分解成一阶跃扰动ΔPs,i(s)=-a/s和剩余部分ΔPr,i(s)=ΔPd,i(s)+a/s之和,其中a为分解 的阶跃分 量 大 小。 若 将 ΔPr,i(s)视 为 一 等 效 设 备(equivalent device,ED)的响应并将该设备的动态用Geq,i(s)表示,则式(1)可以重写为式(2),该过程没有任何的假设和近似,即式(1)和式(2)是完全等价的。
式中:ΔPL2(s)=1TΔPs,其中,ΔPs=[ΔPs,1,ΔPs,2,…,ΔPs,n]T为 从 各 节 点 扰 动 中 分 解 出 的 阶 跃 分 量;Geq,i(s)=-ΔPr,i(s)/Δω(s)为 等 效 设 备 的 频 率-有功传递函数,其功率响应为ΔPr,i(s)。
需要说明的是,分解阶跃分量大小a理论上可以任意选择。但在特定问题中,可能存在一种最适合分析的分解方式,需具体问题具体分析。例如,本文分析的风电机组低穿造成的非阶跃扰动就采取了一种物理意义较为明确的扰动分解方法,具体在3.2节中进行了详细说明。
对比式(1)和式(2)可知,原系统在非阶跃扰动下的频率响应(式(1))可由一构造的等效系统在阶跃扰动下获得(式(2))。具体的,该等效系统的发电设备为在原系统基础上增加了功率响应为ΔPr,i(s)的n台设备(如图1 中红色部分所示),等效系统受到的扰动即为功率阶跃ΔPL2(s),如图1 所示。上述将非阶跃扰动部分功率等效为发电设备功率来分析的方法即为等效设备法。
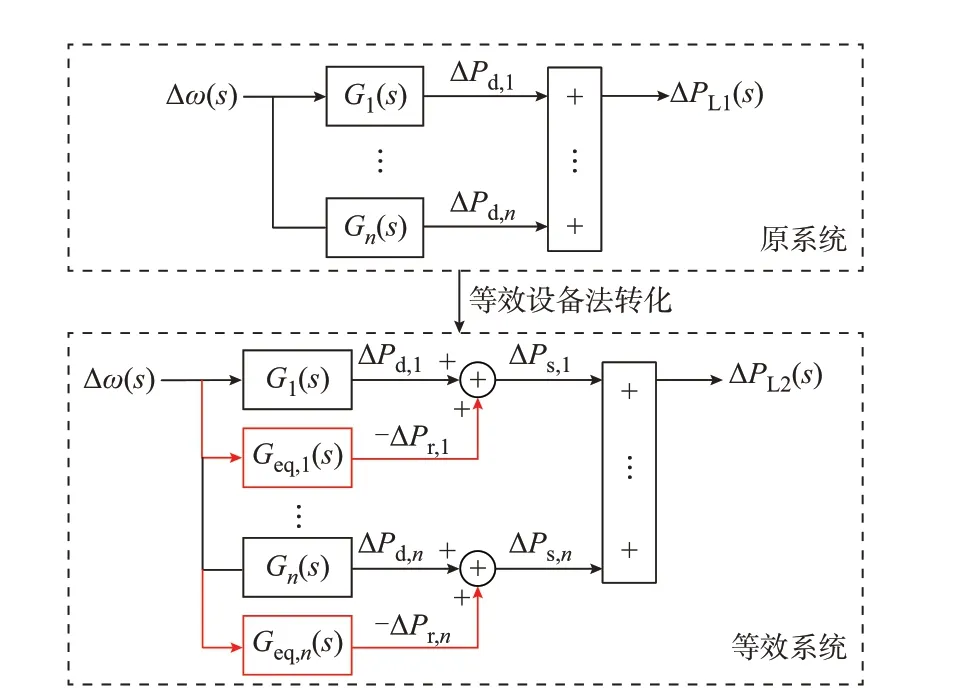
图1 等效设备法示意图Fig.1 Schematic diagram of equivalent device method
需要指出的是,尽管此时系统的功率扰动已转化为阶跃,但由于设备动态仍很复杂,系统频率响应仍难以解析。此时,若系统频率轨迹在功率阶跃扰动后一段时间内接近阻尼正弦曲线[13,17],则可以采用如式(3)所示的统一结构模型Gu,i(s)来近似表征各设备(包括等效设备)在该时间段内的频率-有功动态[13-14],其可行性和合理性在附录A 中进行了说明。

式中:Ju,i、Du,i和1/Ku,i为统一结构参数,分别称为有效惯量、有效阻尼系数和有效动态调差系数。参数求解方法可参见附录A。
进一步,对系统频率最低点Δωnadir,可用如下经验公式[13-14]得到近似量化后的频率最低点Δω′nadir:

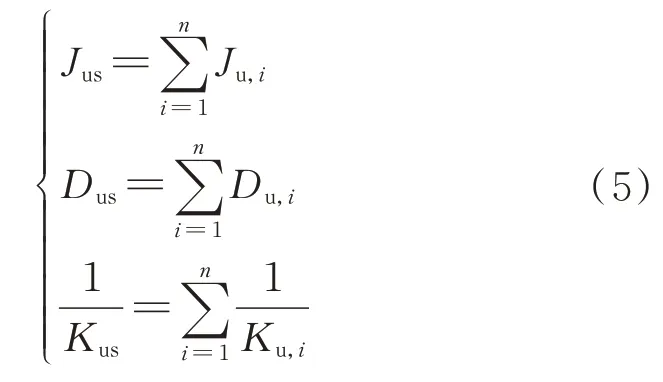
式中:e 为自然常数;Jus、Dus和1/Kus为系统的统一结构参数,分别为
综合上述分析,本章提出了等效设备法,可将受到非阶跃扰动的原系统转化到一受到阶跃扰动的等效系统下,等价分析原系统的频率响应。进而,可以借鉴文献[13-14]中阶跃扰动下的经验公式去量化评估非阶跃扰动下的频率最低点。
3 基于等效设备法的考虑风电机组低穿过程的频率最低点量化
本章首先分析了考虑风电机组低穿过程给系统造成的功率扰动为非阶跃扰动形式。进一步,利用第2 章提出的等效设备法量化分析了该扰动下的频率最低点。
3.1 考虑风电机组低穿过程的系统功率扰动
为量化评估考虑风电机组低穿过程的系统频率最低点,需要分析系统在该过程受到的功率扰动。
根据《风电场接入电力系统技术规定 第1 部分:陆上风电》(后文简称《规定》)[18],当电网发生短路故障时,若并网点电压高于0.8 p.u.,则风电机组应能保持正常运行;若并网点电压低于0.8 p.u.而高于0.2 p.u.,则风电机组进入低穿;而当并网点电压低于0.2 p.u.时,风电机组可从电网中切除。在后两种情况下,风电机组提供给电网的有功功率均会减少,可能引起电网频率下跌。其中,风电机组退网的情况较为简单,对电网来说即为有功阶跃扰动;而低穿过程中的有功动态相对较为复杂,后文将对此进行介绍。
《规定》要求,风电机组在低穿期间需根据电压跌落值向电网提供无功电流。为确保满足此规定,风电机组低穿控制中通常会对有功出力进行限制,一般采用定有功电流控制[11]。为简化分析,近似认为有功电流的参考值为0,即低穿时风电机组有功出力由故障前稳态值(记为PN0)阶跃至0[11]。在故障切除后,风电机组可不再提供无功支撑,但由于载荷限制,其有功出力也不能立即恢复到故障前值。根据《规定》,风电机组需要按照不低于每秒20%额定有功功率的速率(k≥0.2 p.u./s)恢复至故障前的状态[18]。
那么,整个低穿过程中风电机组的有功动态ΔPd,LVRT(t)为阶跃与斜坡形式的组合,可用式(6)表示。

式中:t0为故障发生时刻,可令t0=0;t1为故障切除时刻;u(t)为单位阶跃函数;P0为故障瞬间风电机组低穿带来的功率缺额,P0=PN0;k为故障切除后风电机组的有功功率恢复速率。
结合上述分析可知,在短路故障发生后,系统受到的有功扰动由退网以及低穿风电机组两部分造成。其中,前者为功率阶跃,后者形式见图2。

图2 有功功率动态示意图Fig.2 Schematic diagram of active power dynamics
3.2 基于等效设备法的频率最低点量化
根据3.1 节的功率扰动分析,考虑风电机组退网、低穿过程的系统频率响应。为不失一般性,考虑一个含n台发电设备的风电机组并网系统,其中前l台(编号为1~l)为同步机,后n-l台(编号为l+1~n)为风电机组。在系统发生某故障后,设风电机组中前m台(编号为l+1~l+m+1)进入低穿,p台(编号为l+m+2~l+m+p+2)退网,其余的风电机组(编号为l+m+p+3~n)正常运行。那么,由式(1)可知,系统共模频率(即全局频率响应)可以表示为:

式中:ΔPd,LVRT,i(s)为第i台低穿风电机组造成的有功扰动;ΔPd,off,i(s)为第i台退网风电机组造成的有功扰动;GSG,i(s)为第i台同步机的频率-有功传递函数;Gw,i(s)为第i台正常运行风电机组的频率-有功传递函数。
为利用第2 章提出的等效设备法对式(7)中考虑风电机组低穿过程的系统频率进行分析,需首先从低穿风电机组引起的有功扰动ΔPd,LVRT,i(s)中分解 出 阶 跃 部 分。本 文 分 解 方 式 为ΔPd,LVRT,i(s)=ΔPs,i(s)+ΔPr,i(s),其中ΔPs,i(s)=-P0/s,即大小为P0的功率阶跃扰动;ΔPr,i(s)=e-st1k/s2,即故障切除后风电机组按固定速率恢复的有功功率。这样分解的好处是可以将风电机组有功恢复的动态视为一等效设备动态Geq,i(s),量化其为系统频率支撑提供的贡献。若故障切除后风电机组采用不同的恢复速率k,也可以比较其支撑系统频率效果的差异。
利用等效设备法转化扰动,将式(7)改写为式(8)。进一步,利用统一结构模型近似后,式(8)中共模频率可表示为式(9)。

式中:GuG,i(s)为同步机统一结构模型(参数记为JuG,i、DuG,i、1/KuG,i);Guw,i(s)为 风 电 机 组 统 一 结 构 模型(参 数 记 为Juw,i、Duw,i、1/Kuw,i);Gueq,i(s)为 等 效 设备的统一结构模型(参数记为Jueq,i、Dueq,i、1/Kueq,i)。
进一步,将所有参与调频的发电设备以及等效设备的统一结构参数代入式(4)所示的经验公式,即可得到考虑风电机组低穿过程的系统频率最低点。
基于上述分析,风电机组低穿过程系统频率最低点的评估流程可总结如下:
步骤1:确定进入低穿或退网的风电机组数量和有功功率,从而确定扰动大小和形式。
步骤2:写出各参与调频的发电设备的频率-有功传递函数,利用等效设备法转化扰动,进而确定系统的共模频率。
步骤3:计算各发电设备和等效设备的统一结构参数。
步骤4:利用式(4)所示功率阶跃扰动下的经验公式来计算风电机组低穿过程的系统频率最低点。
4 考虑风电低穿过程的系统频率最低点提升方法
故障后低穿、退网风电机组带来的功率缺额可能引起频率产生较大波动,威胁到系统安全稳定运行。本章提出了一种针对故障后未低穿风电机组的调频参数进行离线优化的方法,以提升频率最低点。
4.1 调频控制方案及调频参数优化模型
目前,风电调频能量来源主要有3 类:风电机组转子动能、基于变桨控制的预留功率和附加储能[15]。储能虽调频效果好,但经济成本较高。考虑到故障发生后可能有部分远离故障点的风电机组仍能正常运行,一种更经济的方式是利用这部分风电机组的调频能力来促进频率恢复。考虑到预留功率的调频方式降低了风能利用率且调频速度慢,对机械部件损害风险增加。此外,许多文献表明,采用综合惯量控制(虚拟惯量加下垂控制)能较好地支撑系统频率[19-20]。因此,本文中风电机组均采用转子动能进行综合惯量控制的调频策略(控制结构见附录A 图A2)。
在整定调频参数时,通常期望调频作用能够使系统的频率最低点尽量抬高,故可以将频率最低点跌落幅值最小作为目标。同时,风电机组参与调频时需要考虑到转子动能的约束,因此,对调频过程中风电机组发出的总能量进行约束。综合上述分析,该优化问题可以描述为:

式中:tc为优化终端时刻,即为风电机组退出调频时刻,本文中选取tc为故障切除后,在故障期间处于低穿状态的风电机组有功功率完全恢复到故障前出力的时刻,可表示为tc=t1+P0/k,如P0=0.8 p.u.,t1=0.1 s,k=0.2 p.u./s,则tc=4.1 s;Elim为给定的调频能量约束值,由可用的转子动能决定;ΔPw,i(s)为风电机组调频功率。
4.2 调频参数求解过程
在近似的共模频率Δωu(s)已知的情况下,可获得各设备的功率响应,进而可将式(10)中的不等式约束与目标函数相结合构造拉格朗日函数,利用拉格朗日乘子法将该约束优化问题转换成无约束优化问题,再利用拟牛顿法迭代求解,直至满足收敛条件,得出满足转子动能约束下的风电机组调频参数的最优整定结果。但是,参数优化的结果又会对系统的近似共模频率产生影响。因此,可考虑采用双层循环优化的方法来整定未低穿风电机组的调频参数[21]。其中,内循环求解各设备统一结构参数并获得近似的共模频率,外循环求解式(10)的风电机组调频参数。求解过程如图3 所示。
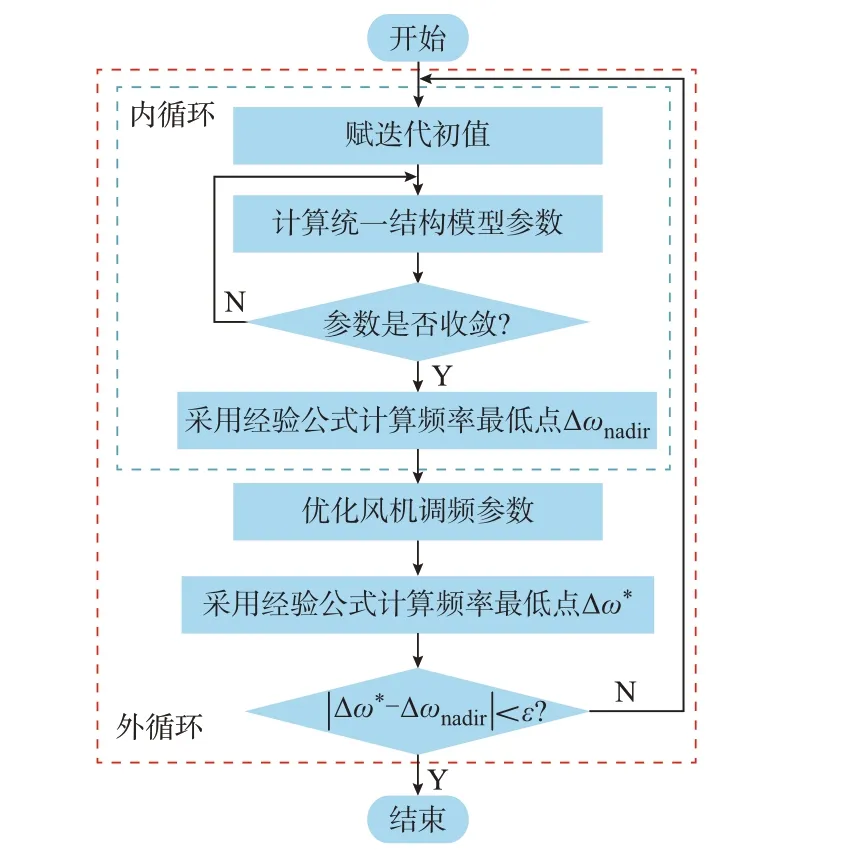
图3 参数优化流程图Fig.3 Flow chart of parameter optimization
具体步骤可描述如下:
步骤1:确定扰动,赋予各设备统一结构参数初值,利用等效设备法将非阶跃扰动等效为设备功率后,计算发电设备与等效设备的统一结构模型参数,直至满足参数收敛条件(两次迭代前后参数变动小于0.1%),计算频率最低点Δωnadir。
步骤2:在上述收敛的统一结构参数下,求解式(10)的风电机组参数优化问题,得到优化的风电机组调频参数和频率最低点Δω*。
步骤3:判断Δω*与Δωnadir差值是否满足误差范围(计算误差小于0.1%)。若满足则结束循环;若不满足则重复步骤1、2,直至满足退出循环条件。
通过该优化问题的求解,可以得到低穿下提供频率支撑的风电机组优化调频控制参数。
需要说明的是:
1)上述优化问题得到的参数整定结果为调频风电机组的统一结构参数Juw,i、Duw,i和1/Kuw,i,可采用文献[21]的方法得到对应的风电机组实际调频参数JWTG,i和DWTG,i。
2)该算法为离线优化算法,可以选择几种典型场景分析不同容量(如30%、50%等)下的风电机组低穿后其余风电机组的最优调频参数。在事故发生时,可通过检测并网点电压快速判断低穿风电机组的容量[22-23]。进而,给其余风电机组下发指令切换至对应的参数。当然,以上分析只给出了一个简单的思路,如何将这种参数切换的控制应用到实际工程中还需要进一步研究。
5 算例分析
为了验证等效设备法量化评估含风电机组低穿系统频率最低点的正确性,以及未低穿风电机组调频参数优化方法的有效性,本章将在MATLAB/Simulink 中进行算例分析。
5.1 算例介绍
本节在某修改的10 机39 节点系统(见附录B 图B1)中进行仿真验证。该拓扑结构与IEEE 10 机39节点标准系统一致,额定频率为60 Hz。发电设备包含同步机、风电机组,其中风电机组配有低穿控制(有功恢复速率为0.2 p.u./s)和附加调频控制(初始调频参数设定为JWTG.i=8 p.u.,DWTG,i=20 p.u.,可利用的转子动能上限为0.5 p.u.),负荷为恒功率负荷。同步机和风电机组的频率-有功传递函数分别如附录B 式(B1)、式(B2)所示。所有发电设备的容量均为1 000 MV·A,主要参数如附录B 表B1 所示。
下文算例中扰动均为t=0.5 s 时发生三相短路故障,并且故障在100 ms 后切除[24]。为分析不同风电渗透率、不同故障严重程度(对机组来说,故障点离机组越近则故障越严重)下,采用等效设备法量化频率最低点的适用性以及风电机组调频参数整定的有效性,考虑以下算例:
算例1:故障点为节点21,并考虑如下3 种情况,即
a)G7、G10 为风电机组,其余为同步发电机组,此时风电渗透率为20%。
b)G6、G7、G10 为风电机组,其余为同步发电机组,此时风电渗透率为30%。
c)G4、G6、G7、G10 为风电机组,其余为同步发电机组,此时风电渗透率为40%。
算例2:故障点为节点23,G4、G7、G10 为风电机组,其余为同步发电机组,此时风电渗透率为30%。
其中,算例1 用来验证本文提出的方法在不同风电渗透率下的有效性;算例2 中的故障节点相较于算例1 离风电机组G7 更近,此时对G7 来说故障更为严重,算例1 与算例2 相结合可说明不同故障程度下本文方法的有效性。
5.2 等效设备法验证
当系统发生故障时,算例1-a 中的风电机组G7,算例1-b 和算例3 中的风电机组G6、G7,算例1-c 中的风电机组G4、G6、G7 进入低穿过程;算例2 中的风电机组G4 进入低穿过程,风电机组G7 退网。在所有算例中,风电机组G10 的电压受故障影响小,处于正常运行状态。各算例中的风电机组电压和有功时域响应分别如附录B 图B3 和图B4 所示。
考虑到共模频率以及统一结构参数是基于参与调频的各发电设备的频率-有功传递函数得到的,本节首先以算例1-b 系统为例,验证各设备传递函数的有效性,仿真结果如附录B 图B5 所示。风电机组和同步发电机组的实际有功响应以及仿真直接得到的和通过频率-有功传递函数得到的(以仿真中的频率作为输入)有功响应轨迹几乎重合。除此之外,设备的实际有功响应波动在以共模频率输入频率-有功传递函数得到的功率响应周围。以上分析验证了各传递函数的有效性。
然后,应用本文所提的等效设备法对所有算例进行分析,得到的设备统一结构参数、频率最低点及相对误差δ如表1 所示。

表1 设备统一结构参数及频率最低点误差Table 1 Unified structure parameters and frequency nadir error of devices
进一步,为验证上述分析的正确性,图4 比较了不同算例下系统的共模频率、近似共模频率以及各发电设备频率的轨迹。通过图4 可以看出,不同风电渗透率和故障严重程度下近似共模频率和系统实际的共模频率基本吻合,并且仿真中发电设备的频率轨迹围绕在共模频率周边波动。同时,根据表1中计算得到的频率最低点的误差分析结果可知,利用本文所提方法计算得到的频率最低点误差小于5%,可以较为准确地反映系统频率最低点。同时,结合表1 和图4 可知,当忽略风电机组恢复过程而直接视扰动为阶跃时,得到的频率最低点与实际系统的频率最低点相对误差δsr很大,进一步说明了本文等效设备方法的有效性。
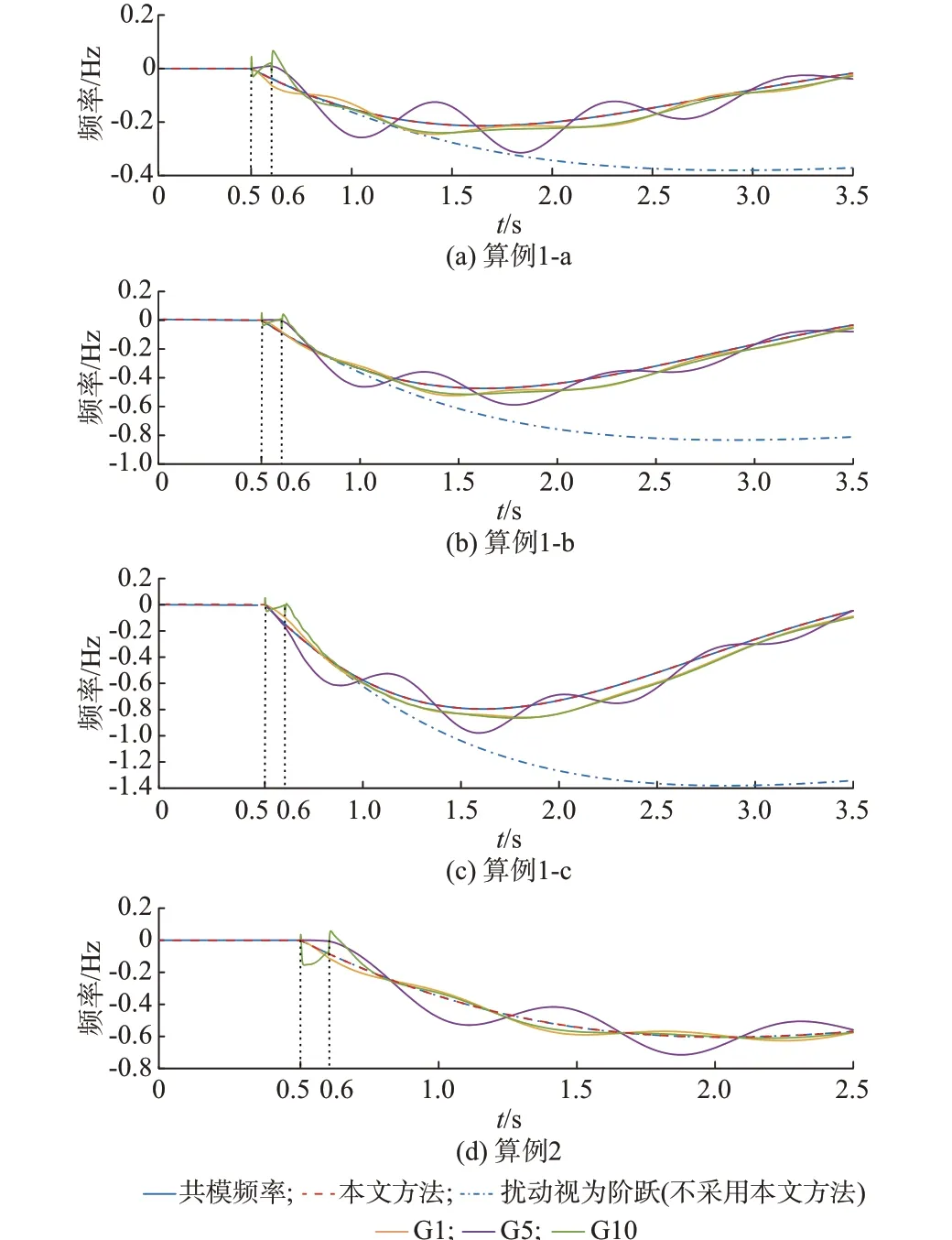
图4 频率轨迹对比Fig.4 Comparison of frequency trajectories
为进一步说明本文提出的等效设备法在不同有功恢复速率下的适用性,在算例1-b 的基础上,调整风电机组的有功恢复速率,计算得到不同恢复速率下的系统频率最低点和统一结构参数,如表2 所示。由表2 可知,不同恢复速率下利用等效设备法计算得到的频率最低点误差较小。同时,当有功恢复速率增大时系统频率最低点提升,此时等效设备统一结构参数Jueq,i略微减小(可忽略其变化);而Dueq,i和1/Kueq,i明显增大,这意味着有功恢复速率越大,风电有功恢复过程类似于调速器作用发挥得越大,对系统频率的支撑作用越强,这是因为风电机组的有功恢复动态过程类似于同步机组调速器的调频曲线。
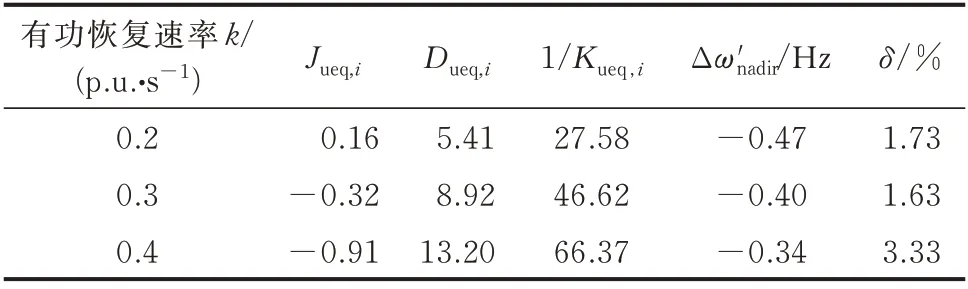
表2 不同恢复速率下的等效设备统一结构参数Table 2 Unified structure parameters of equivalent device with different recovery speeds
以上仿真结果验证了利用等效设备法的正确性和有效性,可简化频率最低点的量化分析。
5.3 未低穿风电机组调频参数整定方法验证
在初始调频参数设置下,不同算例下的风电机组在低穿时利用的风电机组转子动能依次约为0.12、0.29、0.48、0.37 p.u.,未能完全利用,无法实现在有限调频能量下为系统提供最大的频率支撑。
根据表1 中不同算例下系统频率最低点的计算结果可知,当风电机组渗透率增大或者故障严重程度加深时,频率最低点跌落更加严重。这说明当故障发生时,需要未受故障影响的风电机组参与系统调频,充分发挥频率支撑作用。
因此,利用第4 章提出的风电机组调频参数优化方法对所有算例进行分析,并将优化参数下的频率最低点与初始调频参数下的频率最低点进行比较,计算得到提升率,结果如表3 所示。

表3 风电机组调频参数优化结果Table 3 Optimization results of frequency regulation parameters of wind turbines
进一步分析表3,当风电低穿占比越大时,未进入低穿的风电机组调频效果越不明显,频率最低点的提升率越低。原因如下:在系统容量一定的情况下,风电机组接入的数量越多,同步机数量也相应减少,若故障下大面积的风电机组进入低穿,系统中可调用的调频资源明显减少,此时即使充分利用未进入低穿的风电机组转子动能进行调频,对频率最低点的抬升效果也会弱化。但总体上来说,在不同风电低穿占比的情况下,充分利用风电机组转子动能,将可用的最大转子动能转化为支撑功率,都可以不同程度上为频率提供更多的支撑,抬高频率最低点,提高低穿期间频率的稳定性。
进一步,为验证所提风电机组调频参数优化方法的有效性,这里以算例1-b 为例,对比以下几种参数整定方法得到的系统发生故障下的频率响应:1)充分利用转子动能,采用下垂控制(只包含调频参数DWTG,i);2)不调频;3)本文所提的优化方法,如图5 所示。

图5 不同调频参数整定方式下的频率对比Fig.5 Comparison of frequencies by different setting methods of frequency regulation parameters
结合图5 和表3 可知,在关心的优化时间段内,JWTG,i和DWTG,i同时作用才能最大限度地提升频率最低点。原因如下:在扰动的初始时刻,系统频率变化率(sΔω)很大但频率偏差Δω不太大,此时虚拟惯量控制会发出较大功率(JWTG,i sΔω),可以延缓频率跌落进而减小频率跌落程度;而当系统频率接近于频率最低点时,系统Δω较大而sΔω趋近于0,此时,下垂控制DWTG,i发出的功率较大以尽可能抬高频率最低点,两者共同配合才能够实现目标最优。
通过上述结果可知,在以上几种方法中,采用本文提出的方法提升系统频率最低点效果最好。因此,本文所提的故障下风电机组调频参数的整定方法可以实现风电机组调频参数优化,实现风电机组低穿过程中对系统频率的有效支撑。
6 结语
针对非阶跃扰动下的系统频率响应特性分析的问题,本文提出了一种等效设备法,将非阶跃扰动下系统的频率响应转化为一受到阶跃扰动的等效系统进行等价分析,并基于该方法量化评估了风电机组低穿时的系统频率最低点。研究结果表明:
1)风电机组低穿过程造成的有功扰动为非阶跃形式,基于本文提出的等效设备法,可简化分析该过程的系统频率特征,准确量化频率最低点。
2)当系统发生故障时,若存在受故障影响较小而未进入低穿状态的风电机组,则所提出的参数整定方法可以充分利用该部分风电机组的转子动能来支撑频率最低点,以提升风电机组整体的并网友好性。
本文对风电机组低穿过程的频率特征量化及提升方法的研究侧重于理论层面,如何结合在线测量等技术将该方法运用到实际系统中值得进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。