智能汽车上下游企业合作创新演化博弈研究
2023-02-01赵春雨樊锐博
●赵春雨 樊锐博
一、引言
随着我国新一轮科技革命和产业变革加速,信息技术与制造业深度融合,改变了制造业创新模式。中国在多个智能制造领域取得重大创新突破,但基础技术和关键核心技术仍然存在短板,成为制约中国制造业发展的关键瓶颈。2021年2月19日,习近平总书记主持中央全面深化改革委员会第十八次会议时强调,坚决破除影响和制约科技核心竞争力提升的体制机制障碍,加快攻克重要领域“卡脖子”关键技术[1]。智能制造核心企业牵头组建的创新联合体具有较强的发展动力,随着大数据、移动互联网、云计算、北斗导航车载应用、GIS等新型网络、技术和定位科技的持续发展,信息化环境积极促进智能化汽车的可持续发展,为其提供源源不断的技术支持手段和有效载体[2]。
对于关于智能汽车产业合作创新的问题,学者们对产学研合作创新问题研究较为广泛,他们积极探索企业合作创新行为和关系维持原因,以及供应链上下游企业合作创新的效率问题。张中强[3]认为高新技术企业与汽车制造业联动发展需要创新支撑,产品升级迎合新的市场和发展方向,这也决定了协同创新是双方实现共赢的主要手段。巫细波[4]认为“十四五”时期,中国汽车制造业如何构建面向国内外两个市场的产业空间布局。于丽静等[5]利用演化博弈对物流企业与制造业进行分析,指出了协同创新达到稳定状态的条件。Fan等[6]研究了一个由上游制造商和下游零售商组成的两级供应链博弈模型,研究在市场机制下,质量缺陷引起的产品责任成本分担对产品质量决策、定价决策和企业利润的影响。史竹琴等[7]从协同创新的视角出发,选择科技型中小企业创新联盟为研究对象,运用演化博弈的理论,探讨了影响联盟稳定性的因素。曹霞等[8]和孙健慧等[9]利用演化博弈模型对产学研协同创新主体行为的影响因素及演化稳定性进行了分析;张敬文等[10]选择战略性新兴产业集群为研究主体,探究了主体间协同创新发生机理及其动态演化过程,提出了战略性新兴产业集群协同创新促进策略。薛雷等[11]通过构建造船企业与供应商的演化博弈模型,指出双方在何等条件下可实现合作创新。周衍平等[12]基于不完全契约理论,构建种业企业与科研单位演化博弈模型,提出提高合作创新积极性的政策建议。徐勇等[13]研究非对称企业合作创新网络,并利用演化博弈得出各企业每个时刻的策略。
政府对企业创新的支持是推动我国智能汽车发展和产业快速变革的重要动力,因此,产业变革的相关政策一直是研究热点。Mahmoudi等[14]基于演化博弈的理论对政府干预下的可持续供应链与现实案例进行了研究;ZHANG等[15]在总量管制和贸易管制的背景下建立政府与制造企业的演化博弈模型,分析政府政策对制造商决策的影响以及总量管制和贸易市场的动态趋势;Chu等[16]采用了三种演化博弈框架,对政府、开发商及居民的收益进行分析,根据其复制动态方程及雅克比矩阵,得出演化稳定策略,这为演化博弈提供了新的博弈方和推演思路。Yu等[17]利用实证分析得出政府应根据企业的具体情况调整补贴政策,政府补贴应与车企一同配合才能促进车企创新。Shen等[18]提出建筑材料承包商和制造商在内的演化博弈模型,探讨环境规制下建筑废品回收中利益关联者的决策。Guo等[19]运用系统动力学的方法研究了业主、监理单位、承包商三方的相互影响机制,将监理单位引入博弈模型中,为三方演化博弈提供了研究基础。
综上所述,现有研究侧重分析产学研机构和企业合作创新的策略选择及影响,尽管有的研究供应链上下游企业合作,但对于智能汽车这一话题的研究却很欠缺。因此,本文将以有限理性为前提,构建智能汽车上下游企业的合作创新演化博弈模型,分析市场机制条件下,创新收益、创新成本、税收优惠以及惩罚机制对上下游企业合作创新策略选择的影响。
二、演化博弈模型构建
(一)模型假设及博弈主体说明
具有上下游关系的技术提供商与整车企业的合作创新是智能汽车产业链合作创新的主要形式,该方式以市场机制和政策引导来促进双方优势资源的高效利用,实现“1+1>2”的综合效益。传统的博弈主要针对静态博弈,而演化博弈理论强调博弈方之间的动态博弈过程。本文利用演化博弈的动态过程优势,分析整车企业选择是否与技术提供商进行合作创新,亦或是单一地生产传统汽车。由此得出以下假设:
假设1:技术提供商与整车企业的两大群体中,技术提供商群体为T,整车企业群体为M,二者进行合作创新,其发展遵循演化博弈理论的基本假设。
假设2:在市场机制下,当技术提供商与整车企业独立创新的收益均大于合作创新双方自身所带来的收益,即RT<VT,RM<VM,合作创新成本越大,技术提供商与整车企业合作可能性较小。
假设3:在市场机制下,当技术提供商与整车企业合作创新收益大于独立创新时,即RT>VT,RM>VM合作创新成本越小,双方参与合作创新的可能性越大。
假设4:若技术提供商与整车企业在对方不选择合作创新而自己选择合作创新,或其中一方在合作时中途退出,会承担一定的损失(CT,CM),承担损失越大,则双方合作创新可能性越小。
(二)策略选择
技术提供商(T)和整车企业(M)的策略分别为合作创新与独立创新。当技术提供商实施积极合作创新时,就会减少自己在汽车制造上的投入,全权交给整车企业,这时就会有更多的资金和动力去用于技术本身的研发和建设。但是当技术提供商选择独立创新时,技术企业本身所涵盖的制造汽车的项目就会与整车企业构成竞争关系,不仅要支出一部分核心建设的资源和费用来进行汽车制造,对技术提供商的核心竞争力也产生一定影响;同理,整车企业选择合作创新后对自身的发展也有了更广的平台和更大的利益,利用技术提供商的资源和技术可以使制造的汽车实现升级,如果选择独立创新,在新技术的研发上也会没有技术提供商更加专业,只能获得短期利润。两者的这种演化是根据对方的选择而对自己的选择做出决策。
(三)博弈支付矩阵
不进行合作创新时,技术提供商的收益为RT;整车企业的收益为RM。
当双方均选择合作创新,双方分别获得的收益为VT,VM,合作后的各自所需承担的成本为,合作后技术提供商的收益为;整车企业的收益为
当技术提供商进行合作创新,整车企业不进行合作创新时,技术提供商将承担一部分损失CT。这时技术提供商群体的收益为整车企业的收益为RM。
当整车企业进行合作创新,技术提供商不进行合作创新时,整车企业将承担一部分损失CM。这时整车企业的收益为,技术提供商群体的收益为RT。
支付收益矩阵如表1所示。
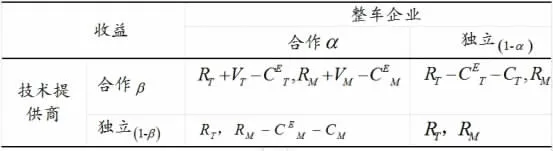
表1 技术提供商与整车企业合作创新的收益矩阵表
三、演化博弈分析
假设整车企业中,选择进行合作创新的比例为α,则1-α整车企业不进行合作创新的比例。在技术提供商群体中,选择进行合作创新的比例为β,则1-β为高新技术企业中不进行合作创新的比例。
(一)收益分析
1.整车企业的收益分析。根据Malthusian方程可得,整车企业M选择合作创新的复制动态方程为:

2.技术提供商的收益分析。同理,技术提供商T在选择合作创新的复制动态方程为:

(二)均衡点分析
如果下列条件得到满足:a11+a22<0,a11a22-a21a22<0,则复制动态方程的平衡点就是局部稳定的,该平衡点是演化稳定策略。
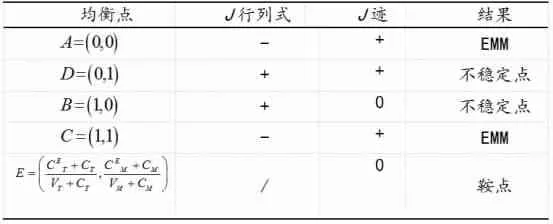
表2 均衡点所在行列式与迹的稳定性结果
由以上博弈过程所得的演化结果,可以得出以下分析:
在以上五个均衡点中,只有两个均衡点(0,0)和(1,1)是演化稳定点。
(三)演化相图
图1中,当双方独立创新的收益大于合作创新收益时,即RT-VT>0,RM-VM>0,他们同时为合作创新付出了一定的成本,此时如图1所示,(0,0)是演化稳定点,(0,1)(1,0)是鞍点,(1,1)此时是不稳定点,即技术提供商与整车企业都不进行合作创新是演化稳定策略。
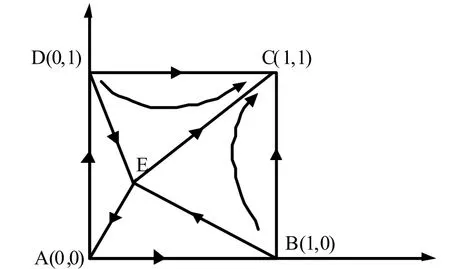
图1 技术提供商与整车企业合作创新演化相位图
当双方合作创新的收益大于独立创新的收益,RT-VT<0,RM-VM<0,且合作创新的成本均小于独立创新成本,(1,1)是演化稳定点,(0,0)是不稳定点,(1,0)(0,1)是鞍点,即技术提供商和整车企业都进行合作创新是演化稳定策略。
当无法得知双方合作创新的收益与独立创新收益相比较的情况时,ABCDE中A(0,0)、C(1,1)点是演化稳定点,B(1,0)、D(0,1)不是稳定点,E是鞍点。这时,技术提供商和整车企业都进行合作创新和都不进行合作创新时,会构成系统的演化稳定策略。
由图可知,有两个不稳定的点和一个鞍点所形成的折线图为系统收敛到两个状态的临界线,在折线左下方,如果初始状态的点在四边形ABED中,则系统收敛到均不进行合作创新的点,即A点。在折线右上方,如果初始状态的点落在四边形BCDE中,则系统收敛到均进行合作创新的点,即C。
图1中,当双方独立创新的收益大于合作创新收益时,即RT-VT>0,RM-VM>0,(0,0)是演化稳定点,(0,1)(1,0)是鞍点,(1,1)此时是不稳定点,即技术提供商与整车企业都不进行合作创新是演化稳定策略。
当双方合作创新的收益大于独立创新的收益,RT-VT<0,RM-VM<0,(1,1)是演化稳定点,(0,0)是不稳定点,(1,0)(0,1)是鞍点,即技术提供商和整车企业都进行合作创新是演化稳定策略。
当无法得知双方合作创新的收益与独立创新收益相比较的情况时,ABCDE中A(0,0)、C(1,1)点是演化稳定点,B(1,0)、D(0,1)不是稳定点,E是鞍点。这时,会构成系统的演化稳定策略。
有两个不稳定的点和一个鞍点所形成的折线图为系统收敛到两个状态的临界线,如果初始状态的点在四边形ABED中,则系统收敛到均不进行合作创新的点,即A点。在折线右上方,如果初始状态的点落在四边形BCDE中,则系统收敛到均进行合作创新的点,即C。
在整车企业与技术提供商的发展中,只有双方积极进行合作创新,才会给彼此带来双赢。但是双方中一旦只有一方进行积极合作创新,而另一方隐藏信息或行动,这样积极实施合作创新的一方就会承担一定的损失,在合作的过程中很难避免一方的创新收益要大于另一方而造成“不公平”行为,所以会出现技术提供商或整车企业率先终止合作或不参加合作的情况。双方合作投入博弈长期演化就会形成两种格局:均进行合作创新或都不进行合作创新。
四、结论和建议
本文运用演化博弈模型,构建了整车企业与技术提供商合作创新的演化博弈模型,分析不同因素下对系统稳定演化状态的影响,研究了有效促进上下游企业合作创新的条件。研究结果表明:
一是在市场机制下,技术提供商与整车企业的合作创新具有明显的“路径依赖”特征。上下游企业的最终策略取决于其所在的初始状态,以及合作创新策略所带来的收益和成本,合作创新所投入的成本越高,所承担的市场风险就越大,不利于上下游企业合作创新策略的稳定性。
二是技术提供商与整车企业的策略选择不仅取决于其自身的成本与收益,同时也受到政府对其的补贴与惩罚策略的影响,政府可以采取税收减免或者惩罚机制来减小上下游企业合作创新的风险,监管力度的增大对技术提供商和整车企业合作创新具有引导和促进作用。
三是市场利益分配机制与政府有效的监督惩罚是保障技术提供商与整车企业合作创新稳定性的重要手段。合理的利益分配机制能够保障博弈上下游企业获得满意的合作收益,实现合作创新的共赢。
基于以上结论,给出如下建议:
首先,企业可建立风险评估机制。针对市场机制下上下游企业无法判别是否一方在合作创新中会突然撕毁合约,积极实施合作创新的一方就会承担一定的损失而造成“不公平”行为。技术提供商或整车企业针对这种情况可制定相应的风险评估机制,或在建立合作创新的策略之初,制定出对于合作创新过程中,由于一方中途退出所带来的损失将由主动退出方全部承担的策略,从而降低中断合作的可能。
其次,政府完善监管制度,引导技术提供商与整车企业进行合作创新。政府对技术提供商与整车企业的制度不应仅局限在税收补贴和惩罚监管,可以考虑建设上下游企业合作所需的相关的基础设施,以及在上下游企业选择合作创新后,对企业的知名度进行推广,增加企业的社会效益。
第三,市场可以完善技术提供商与整车企业的合作创新发展过程中的体制机制。利益是技术提供商与整车企业选择合作创新策略的直接动力,针对在合作创新中的收益与成本的问题,可建立正负性质的激励措施以带来不同程度的促进,引导市场建立差异化和多样性的激励措施,提升合作创新环境的稳定性。
本文从市场机制下分析了技术提供商和整车企业在合作创新中的行为决策,探讨了影响双方合作创新的因素以及稳定性演化策略,并提出了相应的建议以增加上下游合作创新的几率和稳定性,为今后智能汽车的发展提供了一定的借鉴。本文尚未考虑这两类企业独立创新与合作创新所付成本的差值对其合作创新策略选择的影响,今后会多加研究。
