改进预设性能的车辆队列滑模控制方法研究
2023-01-18朱旭王鹏左磊闫茂德
朱旭,王鹏,左磊,闫茂德
(长安大学 电子与控制工程学院,陕西 西安 710064)①
近年来,道路上的车辆呈几何式增长,致使交通阻塞问题日趋严重[1-2].为了解决这一问题,车辆队列作为智能交通领域的研究前沿,日益受到关注[3-4].研究表明:车辆以队列模式行驶可有效提高道路通行效率、车辆燃油经济性和行驶安全性[5].
队列稳定性作为车辆队列控制的重要一环,旨在保证车辆跟踪误差向后不扩散,关乎车辆行驶安全[6].一般而言,保证队列稳定性的控制方法有线性控制方法[7]、基于耦合滑模面的控制方法[8]等.滑模控制因算法简单、鲁棒性强、可靠性高,受到了学界的广泛关注[9].Guo等[10]针对车辆加速度信息中含不确定性的情况,设计积分滑模控制器保证了队列稳定性;Guo等[11]设计了有限时间自适应积分滑模控制器,保证了车辆队列在外部干扰有界情况下的队列稳定性.以上文献中基于耦合滑模面所设计的车辆控制器,需要知晓前车和后车的信息[12].
对于车辆队列而言,若既能加强队列稳定性,又将跟踪误差始终约束在允许范围内,则可大幅度提升车辆队列的控制效果.预设性能控制(Prescribed Performance Control, PPC)是一种约束系统跟踪误差的有力工具,是指在跟踪误差收敛到一个预先设定的任意小区域的同时,保证收敛速度及超调量满足预先设定的条件[13].若能将PPC与滑模控制相结合,则有望提升非线性车辆队列的行驶性能[14].
现有关于非线性车辆队列滑模控制的研究,存在如下问题:在有向通信拓扑下,由于缺乏后车状态信息,耦合滑模面无法合理构建,车辆队列的队列稳定性也就难以保证;即使将PPC与滑模控制方法直接结合,也难以克服该问题;多数研究仅关注车辆跟踪误差向后不扩散,却忽视了车辆状态调节过程中的控制精度,较难实现控制全过程跟踪误差的有效约束.
针对上述问题,本文将PPC与滑模控制相结合,提出一种基于改进预设性能的非线性车辆队列积分滑模控制方法,创新点和贡献在于:①设计了关于车辆跟踪误差的预设性能函数,通过在函数中为每辆车设置不同的衰减速率,以改进前后车的预设性能,提升车辆队列的队列稳定性,并实现跟踪误差在控制全过程的有效约束;②设计了基于改进预设性能的车辆队列积分滑模控制器,无须依赖后车信息,可适用于有向通信拓扑.
1 问题描述
考虑N+1辆在高速公路上沿相同方向行驶的车辆,其中包括一辆领航车(编号记为0)和N辆跟随车(编号记为1~N).车间通信采用一种有向通信拓扑——前车跟随式通信拓扑,见图1.

图1 前车跟随式通信拓扑
第i辆车的非线性动力学模型为:
(1)
式中:t为时间;pi(t)、vi(t)分别为第i辆车的位置、速度;ui(t)为控制输入;fi(t)为车辆动力学模型中的非线性不确定项,其具体形式为:
(2)
式中:mi、Ai、cdi分别为第i辆车的质量、横截面面积、拽力系数;ω为车轮负荷;k为轮胎附着率;a、b为滚动阻力系数;σ为空气密度.
在前车跟随式通信拓扑中,每辆车无法获得后车的状态信息,使用传统基于耦合滑模面的控制器难以保证车辆队列的队列稳定性.因此,本文设计一种基于改进预设性能的车辆队列积分滑模控制方法,以实现如下控制目标:
(1)增强车辆队列的队列稳定性,即保证车辆跟踪误差不沿车队向后扩散.
(2)车辆之间保持安全距离,并能稳定行驶.
2 车辆队列控制系统设计
为了增强非线性车辆队列的队列稳定性,并实现控制全过程跟踪误差的有效约束,本文提出一种基于改进预设性能的车辆队列控制方法,可适用于有向通信拓扑,所提出的车辆队列控制结构见图2.基于改进预设性能的车辆队列积分滑模控制器旨在实现主要的控制目标;径向基函数(Radial Basis Function,RBF)神经网络用于对车辆模型中的非线性不确定项进行逼近,辅助提升控制精度.
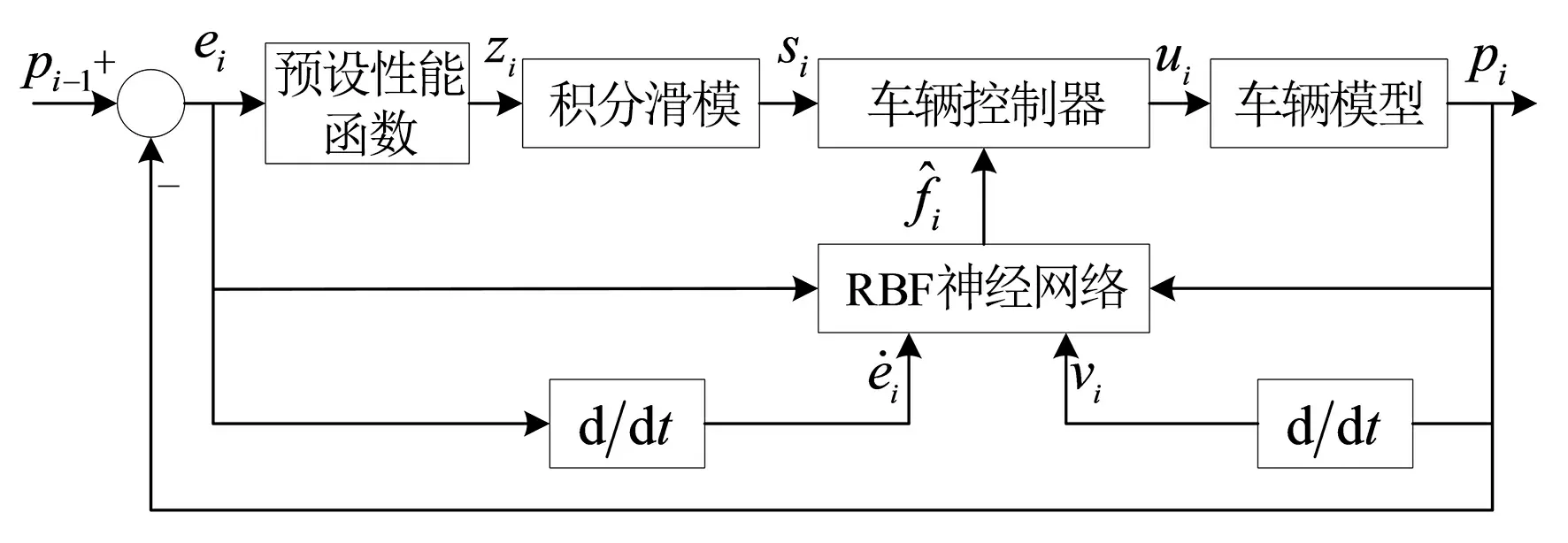
图2 车辆队列控制结构
2.1 改进预设性能函数设计
首先,定义车辆的跟踪误差:
ei(t)=pi-1(t)-pi(t)-di-1,i-Li
(3)
式中:di-1,i为第i辆车到第i-1辆车的期望间距;Li为第i辆车的长度.
ρi(t)=(ρ0-ρ∞)exp(-φit)+ρ∞
(4)

为了便于后续的分析与论证,给出以下两个引理.引理1用于车辆模型中非线性不确定项fi(t)的估计,引理2用于系统内部稳定性的证明.
引理1[15]对于任意非线性函数f,可用如下RBF神经网络模型进行逼近:
f(x)=W*TH(x)
式中:x为神经网络的输入信号;H=[hT,1]T,h为径向基函数;W*=[w*T,ε]T,w*为理想神经网络权值;ε为神经网络逼近误差.
非线性函数f的估计值可表示为:
式中:

通过在预设性能函数ρi(t)中加入衰 减 系 数φi,为每辆车设置不同的衰减速率,改进了前后车的预设性能.沿车辆队列越往后,衰减系数φi越大,对车辆跟踪误差的抑制能力越强,从而增强了有向通信拓扑下的队列稳定性.
根据所设计的预设性能函数ρi(t),确定跟踪误差ei(t)的上下界:
(5)
式中:ξ为设计参数,满足0<ξ≤1.
利用式(4)所设计的预设性能函数,对跟踪误差ei(t)进行重构,得到重构误差:
(6)
(7)
式中:ei(0)为跟踪误差初值,满足|ei(0)|<ρi(0).
上述过程实现了对改进预设性能函数的设计,在预设性能函数ρi(t)中引入了衰减系数φi,增强了有向通信下车辆队列的队列稳定性.衰减系数φi在约束车辆跟踪误差中起关键作用,φi越大,对车辆跟踪误差的抑制能力越强.因此,沿车辆队列越往后,令跟随车对应的衰减系数φi越大,车辆队列的队列稳定性可得到保证.
2.2 车辆队列积分滑模控制器设计
根据式(6)中基于改进预设性能函数所构建的车辆队列重构误差zi,设计积分滑模面[14]:
(8)
式中:α1、α2均为正数.
基于积分滑模面si(t),设计车辆的积分滑模控制器:
(9)
式中:K、η、λ均为正数.
对于车辆模型中的非线性不确定项fi(t),采用RBF神经网络进行逼近,以提高车辆的控制精度.根据引理1,第i辆车非线性不确定项的估计误差可表示为:
(10)
根据式(10),可以确定用来估计车辆非线性不确定项的RBF神经网络参数自适应律:
(11)
式中:γ>0.
为了证明所设计的车辆队列控制方法的有效性,给出如下定理.
定理1考虑由若干辆车辆组成的自主车辆队列,其动力学模型可由式(1)描述.利用车辆的积分滑模控制器(9)、RBF神经网络参数自适应律(11),可使车辆队列按照期望轨迹安全稳定地行驶.
证明:若车辆队列的车间距、速度能达到渐近一致,则整个系统必然是内部稳定的.因此,需要证明基于所设计车辆队列控制方法的系统内部稳定性.
考虑如下Lyapunov函数:
(12)
对式(12)求导:
(13)
结合式(8)~式(11)可得:

接下来,对于所提出基于改进预设性能的车辆队列积分滑模控制方法,给出关于队列稳定性的定理.
定理2若车辆队列里的所有车间距初值满足d1,2(0)≥d2,3(0)≥,…,≥dN-1,N(0),且每辆车对应的衰减速率φi满足φ1≤φ2≤,…,≤φN,则|e1|≥|e2|≥,…,≥|eN|,车辆队列的队列稳定性得以保证.
证明:当d1,2(0)≥d2,3(0)≥,…,≥dN-1,N(0)时,跟踪误差初值满足e1(0)≥e2(0)≥…≥eN(0).在控制器(9)的作用下,车辆跟踪误差ei(t)以此趋势收敛.当φ1≤φ2≤…≤φN时,预设性能函数满足ρ1(t)≥ρ2(t)≥,…,≥ρN(t).由式(5)可知,沿着车辆队列方向越往后,预设性能函数ρi(t)对车辆跟踪误差ei(t)的抑制能力越强,ei(t)的变化范围也因此变得越小,可在一定条件下满足|e1|≥|e2|≥,…,≥|eN|.因此,车辆队列的队列稳定性得以保证.
3 仿真分析
为了验证所提出车辆队列控制方法的有效性,使用图1中的前车跟随式通信拓扑,对由1辆领航车和5辆跟随车组成的车辆队列进行仿真.车辆结构参数见表1,车辆控制器参数见表2.
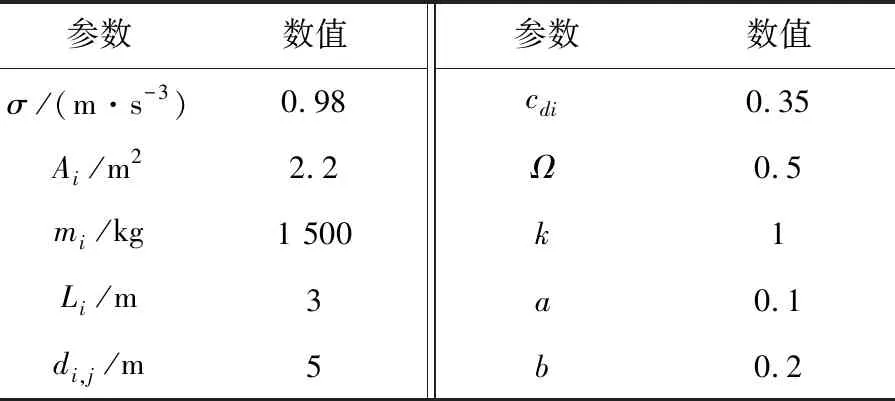
表1 车辆结构参数

表2 车辆控制器参数
RBF神经网络中的径向基函数取高斯基函数,其具体形式如下:
式中:m为RBF神经网络隐层神经元的个数;cj为中心向量;bj为基宽参数.

预设性能函数中的衰减系数φi依次设定为0.3,0.35,0.4,0.45,0.5.
所有跟随车的初始位置和初始速度为:
领航车初始位置为p0(0)=41.5 m.领航车的运动速度为:
设置两组仿真验证所提出车辆队列控制方法的有效性,并对两组仿真进行对比分析.第一组为所提出基于改进预设性能的车辆队列积分滑模控制方法,仿真结果见图3;第二组为传统基于耦合滑模面的车辆队列控制方法,仿真结果见图4.接下来,通过两组仿真的对比,体现所提出控制方法的优势.

(a) 位置

(c) 位置误差

(a) 位置误差
3.1 本文所提出的车辆队列控制方法仿真
从图3中可以看出,本文所提出的控制方法可以令车辆位置误差在短时间内收敛(图3(c)),而且在改进预设性能函数的作用下,车辆队列的稳定性得到了保证,同时车辆位置误差始终被约束在预设的范围内.而且速度误差也在很短的时间内收敛至0(图3(d)),车辆状态最终趋于一致(图3(b)).因此,所设计的控制器有良好的跟踪效果,可确保车辆队列保持安全车间距并稳定行驶(图3(a)).
3.2 基于耦合滑模面的车辆队列控制方法仿真
与本文所提出车辆队列控制方法不同的是,基于耦合滑模面的控制方法[17]直接用车辆跟踪误差构建积分滑模面,难以实现对跟踪误差的约束.同时,由于仿真中使用的前车跟随式通信拓扑是一种有向通信拓扑,车辆无法获取后车信息,难以设计合理的滑模面以保证队列稳定性.
图4可以看出,虽然基于耦合滑模面的控制方法可保证车辆状态误差收敛,但始终未收敛至0(图4 (a)).而且,在2.7~7 s,车辆跟踪误差沿车辆队列向后扩散(图4 (b)),此时队列稳定性受到了破坏.
对比图3、图4,本文所提出的车辆队列控制方法能将跟踪误差始终约束在预设范围内,而基于耦合滑模面的控制方法却难以做到;这说明本文所提出的车辆队列控制方法增强了前车跟随式通信拓扑下的队列稳定性.
4 结论
本文提出了一种基于改进预设性能的车辆队列积分滑模控制方法,增强了非线性车辆队列的队列稳定性,并且在控制全过程有效约束了跟踪误差.首先,在关于跟踪误差的预设性能函数中,针对不同的车辆,设置不同的衰减速率.其次,设计了基于改进预设性能的车辆队列积分滑模控制器,保证了车辆状态快速收敛,从而实现了车辆队列稳定安全行驶. 所提出的车辆队列控制 方法适用于有向通信拓扑,扩展了滑模控制在车辆队列控制方面的应用范围.最后,通过与传统基于耦合滑模面的控制方法的对比仿真,验证了所提出车辆队列控制方法的有效性.