标准时间远程复现系统的不同比对技术对比分析
2023-01-18韩松岳刘娅王嘉琛陈瑞琼许龙霞李孝辉
韩松岳,刘娅,王嘉琛,陈瑞琼,许龙霞,李孝辉
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院大学,北京 100049)
0 引言
随着各行业对高精度标准时间的需求增加,国家标准时间传递的准确性、稳定性和时间同步一致性成为时间频率领域的研究重点。部分用户需要权威且高精度的国家标准时间,却没有条件直接接入中国科学院国家授时中心所保持的UTC(NTSC)。目前国家授时中心设计研制的精度高、体积小、成本低的标准时间复现设备就是为了满足上述用户的需求。铷原子钟是二级频标,它的造价相对于氢钟和铯钟较低,长期稳定性相对于晶振较好。工程实现上,因为铷钟能够小型化,所以复现设备采用铷钟作为频率源。
依托中国科学院国家授时中心保持的国家标准时间UTC(NTSC),基于卫星共视与全视的比对原理,建成了标准时间远程复现系统,可以实现用户本地复现时间与UTC(NTSC)偏差小于5 ns[1]。复现系统由基准站、用户站和数据处理中心三部分组成,基准站位于陕西临潼,接入待复现的标准时间信号,用户站位于测试基线的另一端,于用户所在地进行标准时间信号复现试验,利用GNSS信号和时间间隔计数器结合卫星共视和全视原理,按规定周期生成本地参考时间与各个卫星钟或系统时间的偏差,通过数据传输网络实时交换数据,生成各复现终端时间与标准时间的偏差,用于控制本地时间,使其与标准时间保持同步[2]。将用户站与基准站并址安装在陕西临潼时,测量基线为零基线条件,系统的测量误差最小,标准时间的复现性能主要由对时钟源的驾驭性能决定;当基线拉长,可以通过对比试验,检验基于共视和全视模式下实现标准时间复现的性能差异,为用户选择最优方式提供依据。本文以铷钟作为时钟源分别开展了复现设备的零基线测试和中基线测试,地点分别在陕西临潼国家授时中心和海南三亚测试站(1 774 km)。
1 共视与全视基本原理
共视与全视是远距离时间传输的重要方法,但是两种方法适用范围有所差异。其基本原理都是靠测站接收卫星信号计算钟差,从而实现时间传输与比对。共视方法要求两站同一时刻观测到同一颗卫星并计算星站钟差,通过差分减小比对误差的影响;全视方法利用第三方钟差、轨道产品修正后,计算接收机时钟与GNSST系统时差值。经典的共视和全视比对方法不能完全满足标准时间复现系统对实时性、可靠性需求,应用时进行了适应性改进。
1.1 共视法基本原理
利用共视法计算A、B两地观测站的时差,需要两地用户在同一时刻测量本地钟与相同卫星钟的时间差。对于同一颗卫星的星载钟,它与两观测站的时差为:
ΔTAS=TA-TS-dA,
(1)
ΔTBS=TB-TS-dB,
(2)
式(1)和(2)中,TA、TB、TS分别表示A站时钟、B站时钟和卫星时钟的时间,dA与dB为卫星到A和B站的路径延迟。那么A和B站钟差可以用ΔTAS与ΔTBS做差得到,即:
ΔTAB=ΔTAS-ΔTBS= (TA-TB)-(dA-dB)。
(3)
此时得到的两站钟差的计算公式中,TS通过运算抵消,这样能够消除传播路径上的共同误差,从而实现两地的时间比对[3-4]。
最早的GPS共视法于1980年由美国的D.W.Allan等[5]提出,几年后国际上多数时频实验室很快便具备了GPS共视时间比对的能力,从而大幅提高了UTC计算的精度[6]。经典共视方法标准中,16 min为卫星共视周期,其中13 min用于观测,1 min用于观测准备,2 min用于数据处理[7]。为满足复现系统的实时性和不间断的时间比对,以及驾驭不同类型振荡器的需求,需要灵活共视周期、无间断的比对数据,所以复现系统设计基本观测周期为1 min,可以设置为其整数倍,比如5 min,10 min等。
1.2 全视法基本原理
若A站和B站在ti时刻分别能够观测到m颗星和n颗星,则A站、B站与GNSST的时差可以表示为:
(4)
(5)
式(4)和(5)中,rk和rj为权值,受卫星高度角影响。将两式相减得到A、B两站的钟差值:
(TA-TB)ti=(TA-TGNSS)ti-(TB-TGNSS)ti。
(6)
2004年,国际权度局(BIPM)的Jiang zhiheng和G.Petit提出了可以突破基线限制的GPS全视时间比对,随着比对两站几何基线的增大,全视方法相对共视法的优势越来越明显[6]。2007年江志恒[8]给出了不同基线下共视与全视的观测历元数,在600 km基线长度下共视法与全视法基本具有相似性能,当处于17 000 km的超长基线下,全视法的观测历元有3 085个,共视只有150个,证明全视在基线长度的限制比共视小。另外,因为实时性的要求,全视数据在产品选择上也需要兼顾精度和快速更新两个方面。快速星历的钟差精度能够达到75 ps,比超快速预测产品的3 ns和超快速实测产品的150 ps精度更高,但是快速星历发布滞后17~41 h,超快速实测产品滞后约3~9 h,均无法满足实时性要求[9]。所以在远程复现系统中,选择满足实时应用的超快速预报产品,数据每6 h更新一次[10]。
2 共视与全视复现性能对比方案设计
本文设计了以铷钟为频率源的两组试验,在支持BDS/GPS多频点信号的双模复现系统中进行了零基线和中基线复现试验。试验主要目的是对比全视与共视模式下标准时间复现效果,比较实时条件下GNSS共视和全视驯服铷钟的性能差异,为系统性能优化提供支持。试验结合可用资源条件,选择了陕西临潼和海南三亚两个典型地点。
2.1 零基线时间复现方案及结果
为了测试零基线复现效果,通过系统采集基准端与复现端1 PPS时差,并对比全视和共视模式下的标准差、峰峰值及Allan标准偏差。依据图1所示原理,于2020年8月7日至8月8日在临潼进行零基线共视测试,于2021年3月2日至3月3日进行零基线全视测试,图2为零基线铷钟共视和全视比对数据,分析结果如表1所示。标准差反映数据的离散程度,峰峰值表明测量周期内最大和最小值的变化范围,均为衡量数据波动情况的重要指标。

表1 零基线复现结果分析表

图1 复现方案原理图
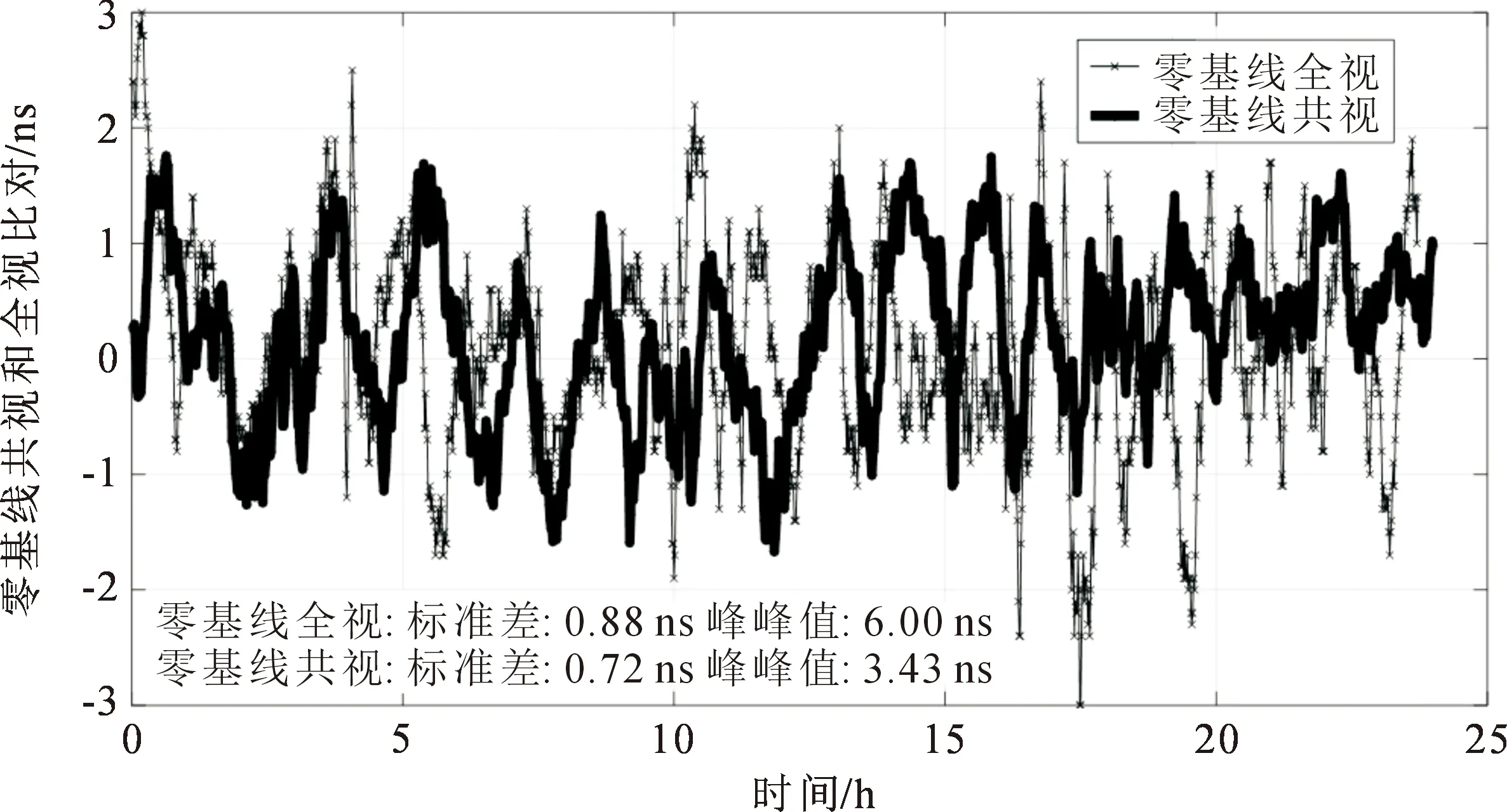
图2 零基线铷钟共视和全视比对数据
实测结果显示,零基线模式下,共视与全视标准差相当,因为两种方法的可视卫星数相当。当共视和全视周期为60 s,测试时间持续约24 h,那么实际得到数据约1 440 个,无法分析秒稳定度,只能计算采样间隔大于60 s的Allan标准偏差。图3反映的是零基线复现信号的频率稳定度,两条图线分别表示共视和全视模式。采用取样间隔τ>60 s的Allan标准偏差表征,图中具体数据如表3的第2和第3列所示。

图3 零基线铷钟共视和全视Allan标准偏差
2.2 中基线时间复现方案及结果
为了评估中基线标准时间复现效果,选取海南三亚作为复现地点,搭建复现终端设备,以陕西临潼为基准终端站点,连接国家标准时间UTC(NTSC),临潼至三亚基线长度为1 774 km。测量原理与零基线相同,中基线全视测试时间为北京时间2020年9月26日17:00:10至2020年9月27日18:40:10,共视测试时间为北京时间2020年9月25日14:40:10至2020年9月26日16:40:10,测控周期为60 s,实验保证连续测量24 h。将共视和全视的时差数据经过粗差剔除处理,结果如图4所示;具体波动情况见表2,共视数据的标准差为1.23 ns,峰峰值为6.48 ns;全视数据的标准差为3.19 ns,峰峰值为16.3 ns。由标准差和峰峰值可见,实测共视模式比全视模式更稳定,波动较小。
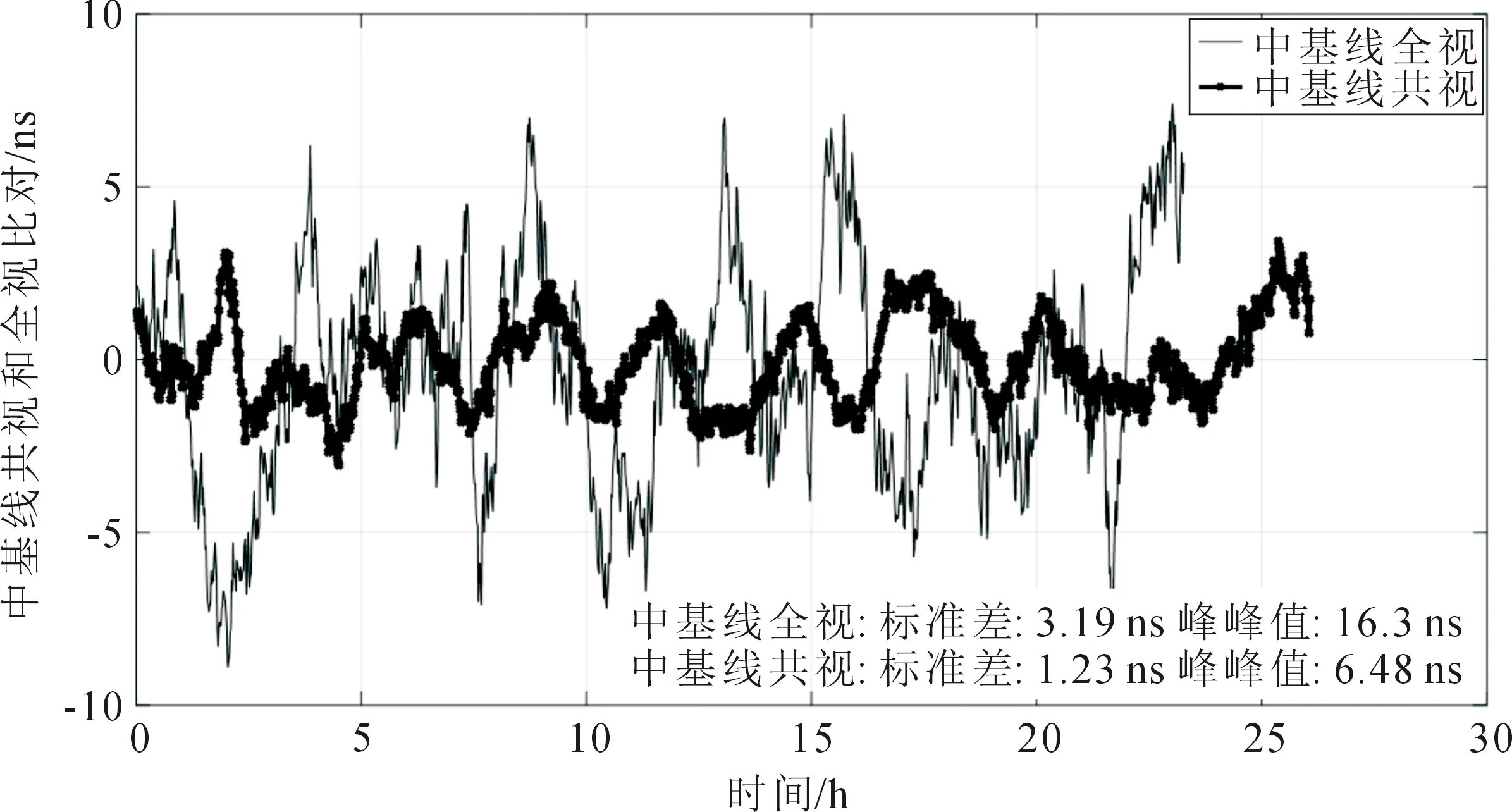
图4 中基线铷钟共视和全视数据

表2 中基线复现结果分析表
与零基线数据类似,当测控周期为60 s,实际得到数据约1 440 个,短期稳定度无法评估,仍然计算采样间隔大于60 s的Allan标准偏差。结果如图5所示,中基线共视模式下的频率稳定度同样比全视更加稳定,具体数值见表3的第4列和第5列。

图5 中基线共视和全视Allan标准偏差对比
2.3 实测结果比较分析
总结2.1和2.2节的试验结果,将Allan标准偏差汇总在表3,能够得到如下结论:从不同基线来看,基线越长,复现信号与标准时间的偏差起伏越大,因为加长基线导致误差影响变大,共视或全视比对误差的主要来源有卫星钟、轨道、电离层、对流层影响、天线相位中心偏差以及多径效应等。从测量模式对比,理论上,零基线条件下,全视与共视的复现效果应相当,基线越长,全视的性能优势应越明显。

表3 零基线、中基线共视和全视稳定度比对
当前国际上普遍采用不确定度评估时间比对方法的性能,在此本文对复现系统共视和全视模式下的不确定度进行估算。整个比对过程中影响精度的主要有与卫星相关的误差,如星钟误差,卫星的轨道误差;传播过程中的误差,如电离层、对流层误差;还有接收机误差等。按照主要误差来源结合实测数据和经验参数,给出各自的不确定度估计。因为共视比对将卫星时钟作为中间量抵消掉,所以卫星共视的星钟误差影响可忽略[11-12]。表4为全视和共视的不确定度来源。
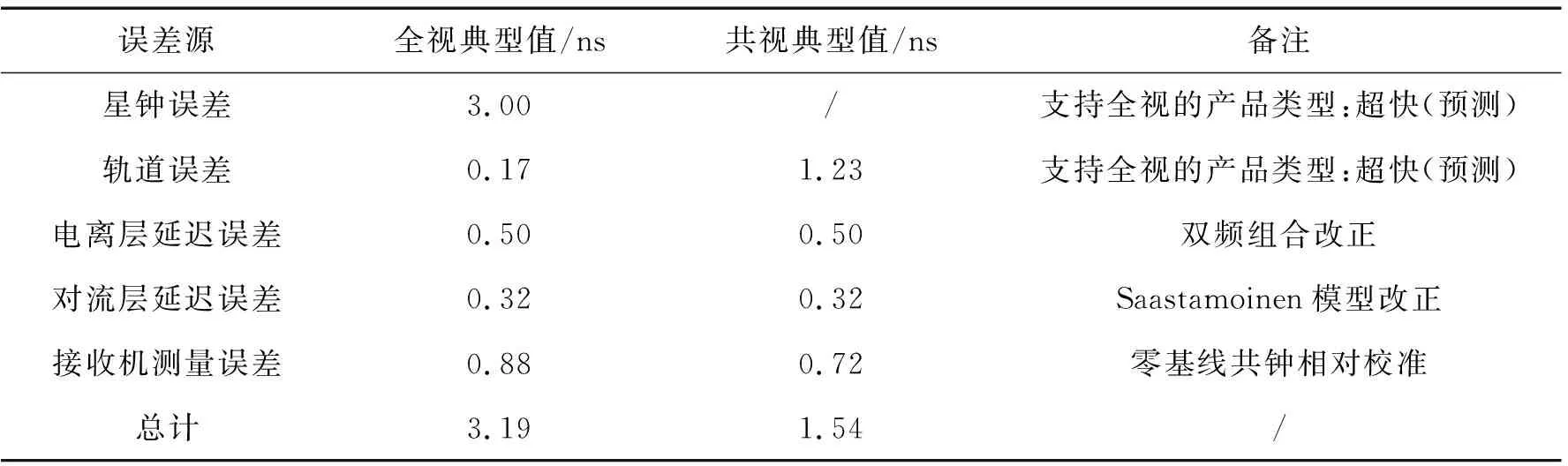
表4 全视和共视不确定度来源比对
假设上述各项误差是统计独立的,则可以估计全视和共视时间比对的合成不确定度分别为3.19 ns和1.54 ns:
(7)
(8)
综上所述,当前系统条件下,在千千米基线上,共视模式比全视模式能获得更高的性能。进一步分析原始数据发现,基于超快速预报产品的全视实时比对,由于依赖第三方平台提供服务数据,应用过程中,存在部分观测周期未能获得有效的星历数据问题,导致观测结果误差修正不完整,出现测量结果跳变。为解决上述问题,计划下一步通过优化数据处理逻辑、升级处理器能力和支持多渠道星历产品等方式,改进系统能力。
3 结语
本文所基于的标准时间复现系统,突出特点在于其实时性。在零基线和1 774 km中基线的共视和全视时间复现试验中,验证了复现性能与基线长度的相关性,基线越长复现终端和基准终端受测量误差影响越大。通过共视和全视两种方法的复现对比分析,反映出当前系统存在的不足,并为下一步系统优化提出了建议解决方案。
本文试验的基线长度只选择了0 km和1 774 km,但是根据相关论文,全视在长基线条件下数据可用率比共视数据可用率更高,在更长基线条件下,较共视模式有显著优势[9]。因为客观原因,目前还不具备在海外开展更长基线实验的验证,共视和全视的复现效果差异有待进一步验证。
在后续的工程规划中,除了现有的晶振和铷钟分别作为复现设备的时钟源,晶振与铷钟锁相输出1 PPS信号也将作为复现终端时钟源进行实验。锁相环作为产生、输出周期信号的电子控制环路,通过不断地调整输出信号的相位使其与输入信号相位时刻保持一致[13]。如果锁相环调节后精度有所改善,其输出的稳定度能够分别相比铷钟和晶振复现效果有所提高,时差数据波动更小,则有可能为精度需求更高、使用场景更广泛的用户提供服务。