天绘二号卫星系统定位精度浅析
2023-01-16李世忠范炜康高敬坤
李世忠,叶 宇,范炜康,丛 琳,高敬坤,邵 龙
1. 中国资源卫星应用中心,北京 100094; 2. 西安电子科技大学,陕西 西安 710126
干涉合成孔径雷达(interferometric synthetic aperture radar,InSAR)是合成孔径雷达的一个重要应用方面,它基于干涉测量的理论和方法,采用微波传感器为有效载荷进行对地观测,能够满足用户任务全天时、全天候对地形、地面认知的需要,并且可高度自动化地生成全球高精度地表三维模型及地面测量高程,受到了世界各国的高度重视。按平台的不同,天基InSAR系统可分为单平台双天线InSAR、重复轨道InSAR和分布式InSAR 3种系统,3种系统数据获取方式不同,具有各自的优势和关键技术,但工作原理基本相同,都是通过以相近的视角两次对地面同一目标区域成像,利用两幅图像干涉相位和成像几何参数计算出目标地形的高度。
随着卫星技术的发展,多颗卫星协同工作的分布式InSAR在提高高程精度、减小单星设计难度方面表现出更多优势[1-4]。在星载InSAR系统方面,国外科研人员主要基于TanDEM-X卫星系统开展相应数据处理技术研究,文献[5—8]对相关的数据处理算法进行了研究分析。国内科研人员对InSAR技术的研究主要基于仿真分析或借助少量国外星载干涉数据,由于国外所提供的实测数据数量及类型有限,无法全面预测全球实测数据处理过程中可能面临的难题及技术壁垒,更多的是从事一些跟踪研究[2-3,9-12]。
2019年4月,我国首发InSAR卫星系统天绘二号发射在轨后,填补了我国星载微波干涉测绘领域的空白,文献[13]对系统设计与实现进行了说明介绍。天绘二号卫星以两颗编队卫星为平台,以高分辨率的合成孔径雷达和高精度的星间相对状态测量设备等为有效载荷,全天候、全天时、快速获取全球雷达影像和辅助测量数据,快速、高效制作数字表面模型(digital surface model,DSM)、雷达正射影像(orthorectified radar image,ORI)等测绘产品,系统在轨高精度卫星近距离编队运行、试验场高精度三维几何干涉定标和InSAR立体测绘规模化生产在国内均为首创,为使国内相关领域科研人员针对天绘二号开展更深层、更广泛的处理与应用技术研究,本文结合系统研制建设及在轨测试、数据处理情况,对卫星系统定位精度进行了初步浅析,更好地推进天绘二号系统有效支撑全球地理信息框架构建,为经济建设和社会发展提供服务。
1 天绘二号卫星
天绘二号卫星系统由两颗卫星组成绕飞编队,在时间、空间、相位三同步保证下,以一发双收、条带成像的方式获取同一场景的InSAR回波数据,同时对星间状态进行高精度测量。为保证高程测量精度,系统设计了低、中、高纬度3种编队构形,满足了不同地区的任务需求。天绘二号卫星实现了我国从“单星SAR成像”向“多星编队协同干涉”质的飞跃,具备了对全球开展全天时、全天候的高程测绘能力和雷达正射影像的全自主获取能力,填补了我国天基InSAR系统的空白。
1.1 卫星平台
天绘二号卫星系统在单SAR卫星平台和有效载荷的基础上,新增卫星编队、控制及时间、空间、相位三同步技术,为满足系统使用要求及工作寿命期的供电需要,卫星系统选择太阳同步冻结回归轨道,主要参数见表1。
1.2 卫星工作模式
卫星主要采用绕飞编队InSAR测高工作模式,如图1所示。两颗SAR卫星按照设计的绕飞编队构形,在满足基线要求的时间内,各星载SAR按时间、空间、相位三同步的方式,单航过、一发双收地获取地面同一地区的条带SAR相干回波数据,数据下传后由地面进行InSAR测高处理。
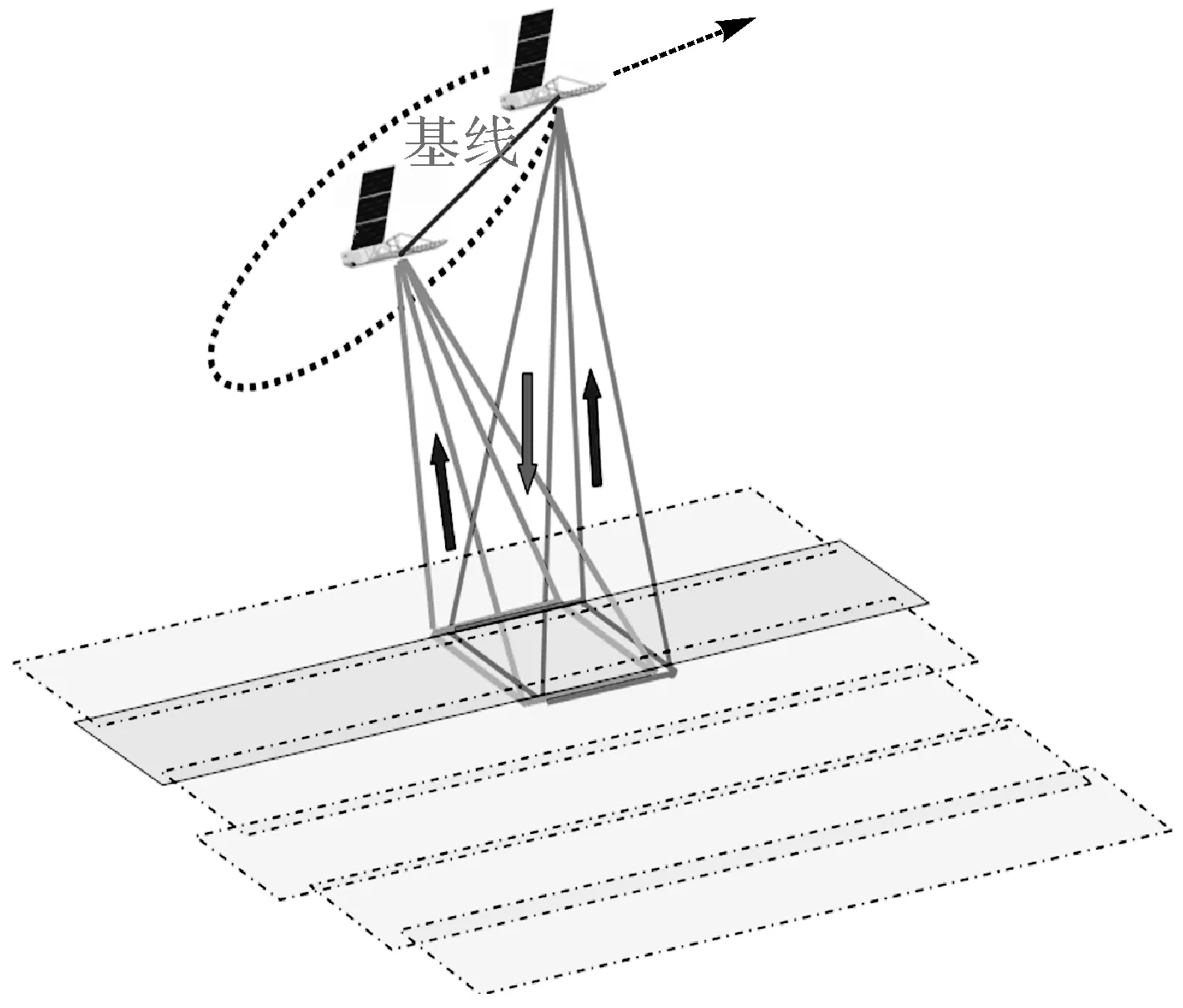
图1 绕飞编队InSAR测高工作模式Fig.1 InSAR altimetry mode for circling formation
2 定位误差模型及数据处理流程
2.1 InSAR定位模型
一发双收分布式InSAR通过两幅SAR天线对同一地区进行观测,在获取同一地区两幅复影像中提取相位差,形成干涉条纹图,然后利用解缠后的相位提取地面高程信息。分布式卫星SAR系统InSAR测高空间几何关系如图2所示。
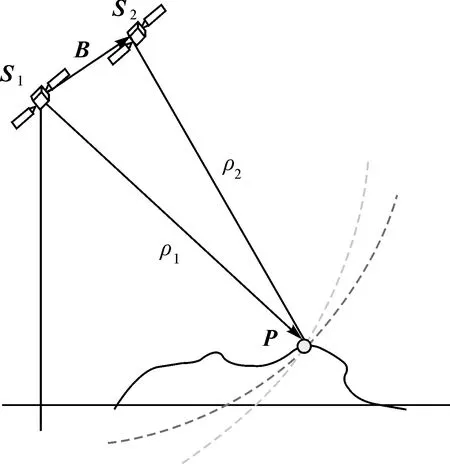
图2 InSAR定位原理Fig.2 InSAR positioning principle
在空间直角坐标系下,考虑影像中某一目标点矢量Ρ,引入矢量Sk、B、Vk分别表示雷达天线相位中心的位置、两雷达天线相位中心基线及速度;引入标量λ、ρk、fk分别为雷达波长、雷达天线相位中心到目标点斜距和多普勒中心频率,设斜距ρ2=ρ1+Δρ,下标k=1、2表示主星雷达和辅星雷达。InSAR定位处理即结合主星斜距方程、主星多普勒方程和干涉相位方程来联立求解目标点矢量Ρ
(1)
引入Φ表示雷达天线干涉相位,将基线矢量B=S2-S1、斜距差Δρ=Φλ/2π代入式(1)整理可得InSAR定位方程
(2)
2.2 误差链路传递
在定位方程中,各个参量误差按照一定系数传递到目标点矢量Ρ的高程定位误差和平面定位误差中,影响定位精度因素的主要参量包括:主星SAR位置测量误差、主星SAR速度测量误差、主星斜距测量误差、干涉相位误差、星间基线测量误差[11-16]。
分析式(1)和式(2),设x代表其中任一标量参数,对等式左右两边分别关于x求偏导并代入Δρ=Φλ/2π后,整理可得
(3)
(4)
(5)
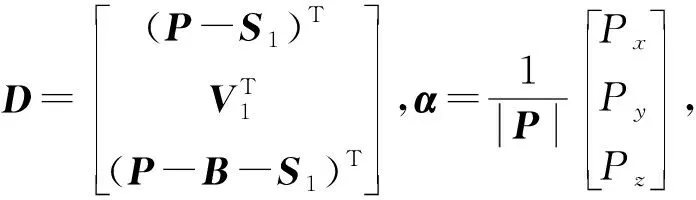
分别令x等于ρ1、Φ、Bx、By、Bz、S1x、S1y、S1z、V1x、V1y、V1z,即可得到各个参数误差导致的高程误差表达式,而平面误差是目标点空间位置误差矢量与高程误差矢量之差的模,即平面误差为Δxy=|ΔP-Δh·α|,联合式(4)、式(5)同样可以得到平面误差与各参数传递关系。为分析简化,上述误差传递公式可概要表达为:
(1) 主星SAR天线相位中心定位误差传递公式,由主星SAR定位测量误差引起的高程误差ΔhS1

(6)
由主星SAR定位测量误差引起的平面误差ΔxyS1为
(7)
(2) 主星SAR速度测量误差传递公式,由主星SAR速度测量误差引起的高程误差ΔhV1为
(8)
由主星SAR速度测量误差引起的平面误差ΔxyV1为
(9)
(3) 主星斜距测量误差传递公式,由主星斜距测量误差引起的高程误差Δhρ1为
(10)
由主星斜距测量误差引起的平面误差Δxyρ1为
(11)
(4) 干涉相位误差传递公式,由干涉相位误差引起的高程误差ΔhΦ为
(12)
由干涉相位误差引起的平面误差ΔxyΦ为
(13)
(5) 星间基线测量误差传递公式,由星间基线测量误差引起的高程误差ΔhB为
(14)
由星间基线测量误差引起的平面误差为
(15)
根据误差综合原理,对应的高程绝对定位精度误差、平面绝对定位精度误差计算公式为
(16)
(17)
2.3 数据处理流程
根据星载InSAR成像机理、误差传递链路等,地面数据处理的基本步骤包括:复影像配准、干涉相位生成、去平地效应、相位滤波、相位解缠、绝对相位确定、初始DSM生成、DSM编辑与镶嵌、正射影像纠正、正射影像镶嵌与匀色等[17-18],详细处理流程如图3所示。
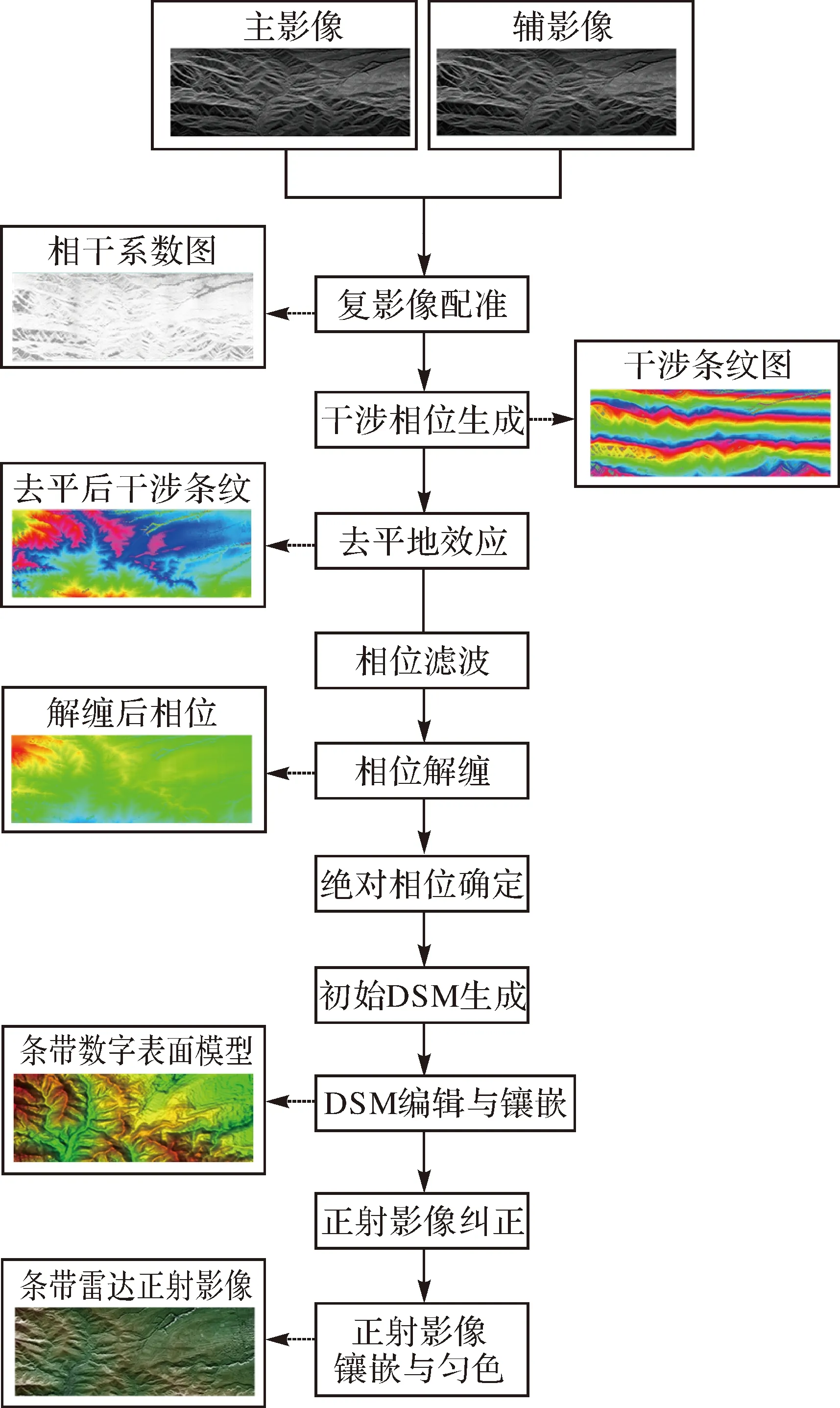
图3 数据处理流程Fig.3 Data processing flowchart
(1) 复影像配准。在实际干涉处理过程中,由于两幅图像的相干像元存在着一定程度的偏移、拉伸和旋转,同一坐标网格的图像像素并不对应于地面同一散射单元。因此,在影像对提取干涉相位前,需要对两幅影像进行配准,确保用于干涉的像素对应地面同一散射单元。系统利用雷达几何法进行图像预配准处理、采用基于幅度互相关法的粗配准处理、采用基于相位的互相关法的精配准处理等步骤来获取配准偏移量,以支撑复影像配准[19-22]。
(2) 干涉相位生成。SAR影像中每一个像点是由实部和虚部组成的复图像数据,系统依据共轭相乘运算法则对两幅SAR复图像进行干涉处理,计算出每一个同名点的相位差,即可生成包括幅度和相位在内的复干涉相位图。
(3) 去除平地效应。由于干涉SAR成像时,平坦地区产生的干涉条纹和地形起伏引起的条纹叠加在一起,导致干涉条纹密集且复杂,增加了后续相位解缠的难度。因此,在InSAR数据处理中,必须要对干涉条纹图去除平地效应,保证为后续滤波、解缠提供高质量的干涉条纹图。系统根据精密轨道数据等几何关系计算出无高程变化的平地相位,并将平地相位从干涉相位中分离出去,以降低条纹密度[17]。
(4) 相位滤波。在InSAR数据处理过程中,由于受各种因素的干扰,导致干涉条纹不清晰,出现“毛刺”等现象,周期不连续降低了后续相位解缠的效率及精度,这些误差会沿着相位解缠继续传播,最终影响DSM产品的质量。因此,在相位解缠前,必须对干涉条纹图有效地滤除噪声,提高信噪比。系统默认方法为基于坡度估计的滤波算法,如果希望快速得到滤波结果,可以采用均值滤波算法[23]。
(5) 相位解缠。通过干涉图获取的相位差其实只是相位主值,其范围分布在(-π,π]之间,为了得到真实的相位差,需要在这个值的基础上加上或者减去2kπ,这个过程即为相位解缠。相位解缠是InSAR数据处理过程中一项重要的环节,获取的解缠相位值将直接影响DSM产品的高程精度[24-25]。系统默认方法是基于加权枝切线的相位解缠算法,在处理结果不理想时,可以依次选择基于网络流的相位解缠算法和基于最小生成树的相位解缠算法。
(6) 绝对相位确定。解缠之后生成的干涉相位与绝对干涉相位仍然相差一个整周期数,需要求出绝对模糊数,与解缠相位进行相应的运算,才能得到最终的绝对干涉相位[26]。系统默认方法是基于双频数据估计模糊数,如果数据中不包括双频信息,或基于双频数据的估计结果不正确,则依次选择基于控制点的模糊数估计方法、基于先验DEM的模糊数估计方法和基于配准偏移量的模糊数估计方法处理。
(7) 初始DSM生成。结合干涉相位方程、斜距方程和多普勒方程来求解目标点三维坐标,从绝对相位到获得DSM产品还需要经过两步:① 目标定位,得到绝对干涉相位后,还需解算InSAR定位方程完成地面定位,才能得到目标点在斜距域中的高程信息,完成相位到高程的转换;② 地理编码,通过相位到高程的转换得到地面目标点的位置数据,依然是在主图像的斜距域上的,还要进行地理编码,将斜平面高程投影到地平面上才能得到初始的DSM。
(8) DSM编辑与镶嵌。利用解缠相位反演的高程值会受到相位噪声、叠掩、阴影等不确定因素的影响,从而使获取的DSM存在粗差。为了获取质量较好、满足生产规范和图幅要求的DSM,需要对DSM进行粗差剔除、水域置平、地物编辑、条带相互补充漏洞、条带拼接镶嵌等处理。
(9) 正射影像纠正。SAR影像的透视收缩、叠掩和阴影等几何特征不利于用户对影像特征的理解和专题信息的提取,因此SAR影像在应用前需要对其几何畸变进行校正。系统基于F.Leberl模型根据成像时的距离条件和多普勒频移条件建立SAR成像瞬间相对严格的物像关系进行影像纠正处理[27-28]。
(10) 正射影像镶嵌与匀色。受干涉像对大小的影响,需要将由干涉处理获取的多幅正射影像进行镶嵌处理,以此满足测绘任务的需求。由于入射角的不同和辐射校正误差等因素的影响,不同轨道获取的正射影像存在色调差异,从而导致拼接后存在明显的拼接线,须对其进行匀色处理。系统影像拼接的基本过程包括特征提取、影像匹配、重叠区影像配准,并采用SIFT算法进行重叠区配准。
3 仿真分析与在轨测试
天绘二号卫星系统在轨运行时,主、辅星形成绕飞编队构形,采用一发双收的方式开展InSAR测高工作,在星载SAR之间满足时间、空间、相位三同步要求的前提下,当星间基线满足设定范围条件时,两个SAR所收到的地面回波之间具有较好的相干性,此时编队卫星以单航过、一发双收的方式进行干涉回波录取,数据下传后由地面进行DSM生成处理。卫星系统方案设计阶段定位精度仿真及在轨定位精度测试情况如下。
3.1 方案设计阶段定位精度仿真分析
根据卫星系统设计和任务要求,综合考虑各项误差影响,结合上述定位误差模型的建立,本节重点针对不同基线长度及入射角进行仿真。
3.1.1 仿真条件及误差因素分析
仿真输入条件为:轨道高度520 km、波长0.031 m、卫星速度7 km/s,在主基线区域分别选取700、800、900、1000 m有效基线长度,700~1050 m中纬度构形进行;结合研制技术水平,并留有余量,卫星初样方案设计阶段按系统全寿命期最恶劣情况各项误差源控制分配考虑,同时与GNSS相关计算取超快星历数据分析。
(1) 主星SAR定位测量误差:这里指主星SAR天线相位中心位置,它利用GNSS观测数据进行卫星定位,并根据GNSS与SAR天线相位中心位置关系,通过坐标转换获取SAR天线相位中心位置。影响卫星定位测量精度的误差源包括GNSS星历误差、GNSS载波相位误差、GNSS地面安装误差、GNSS天线相位中心稳定度、GNSS天线形变误差及电离层传播时延差,综合考虑系统全寿命期卫星平台及GNSS与SAR两类载荷各种不可控因素与恶化情况(如发射引起的各载荷关系不稳定性),SAR天线相位中心定位测量误差分配为分米级,可按超快速星历1 m代入仿真分析。
(2) 主星SAR速度测量误差:这里主星SAR速度参考点为雷达天线相位中心位置,主星速度是通过地面事后动力学定轨方法获得,由于动力学定轨中采用了轨道模型平滑约束,因此速度的求解精度一般要比运动学或几何方法要高。前期CHAMP卫星实测的数据表明,使用事后精密星历数据,利用动力学方法得到的速度与德国地学中心GFZ科学轨道的外符合精度进行互差比较,分别为R方向约0.3 mm/s、T方向约0.3 mm/s、N方向约0.1 mm/s、三维外符合精度约0.4 mm/s,综合考虑系统全寿命期、GNSS转换到SAR天线相位中心及使用超快星历进行数据处理等因素,分配5 mm/s(1σ)的绝对测速精度。
(3) 主雷达斜距误差:斜距测量精度是指SAR载荷天线相位中心到地面成像目标点距离的确定精度。斜距测量误差包含SAR载荷定时信号误差和大气传播时延引起的斜距误差。其中SAR分系统引入的斜距误差来自于星上中央电子设备和天线传输两方面,斜距精度可以转换为回波延迟时间的测量精度,即由于雷达设备内部时钟抖动造成的延迟时间测量误差;SAR雷达发射和接收脉冲两次经过电离层和平流层,此时光速将小于真空速度。如果利用真空光速和雷达时延计算雷达斜距,将导致斜距值过估计,因此需要针对大气传播时延作专项分析和系统修正,综合考虑星上设备系统全寿命期变化及大气传播时延修正残余,斜距精度误差分配控制应不大于4 m。
(4) 干涉相位误差:影响干涉相位误差的主要因素是卫星载荷SAR数据获取引起的相位误差、数据处理引入的相位误差以及影像去相干引入的相位误差。① SAR数据获取引起的相位误差包括主辅雷达的时延误差,以及两雷达之间的相位同步误差,总体分配误差指标为14°。一方面,时延相位误差是由于硬件电路的不稳定导致的通道等效时延相位在工作期间的随机变化量,通过载荷试验结果表明,在雷达开机工作4 min时间内,主辅雷达随机性相位不超过2°;另一方面,相位同步误差具有随时间慢漂的性质,相位同步误差源包括多普勒相位、正反向发射延迟、星间基线、同步信号与探测信号的通道差别、同步信号的信噪比、补偿相位的采样与恢复误差及同步喇叭天线方向图的相位变化等,理论及仿真分析“系统性+随机性”小于10°。②数据处理引入的相位误差是指地面数据处理导致的相位误差,采用路径解缠的方法一般不会引入误差,对质量较差的阴影、低相干区进行二次解缠可能会引入误差,目前给相位解缠处理分配的相位误差为6°,干涉相位滤波的相位误差为3°、成像处理引入的相位误差为3°。③影像去相干误差主要包括配准去相干、体散射去相干、基线去相干、信噪比去相干、多普勒去相干及量化噪声去相干,综合考虑系统全寿命期及系统改正残差,影像去相干相位噪声平地约为22°、山地约为38°。
(5) 星间基线测量误差:星间基线测量指的是利用主辅星GNSS的原始观测数据及相应的精密星历和精密钟差等数据,经高精度事后载波相位差分处理,获取GNSS天线相位中心高精度的三维相对位置和相对速度,并通过坐标转换获取两星SAR天线相位中心的基线。星间基线测量精度是制约InSAR定位精度的最大误差源,基线测量精度能否保证直接影响了卫星系统指标实现。星间基线测量的误差源有3大类:第1类是GNSS测量误差,主要包括GNSS接收天线相位中心稳定度、GNSS天线安装位置地面测量误差、GNSS载波相位误差、卫星平台变形引起的GNSS位置变化误差、电离层传播相对时延误差及GNSS精密星历误差;第2类是SAR天线相位中心测量误差,主要包括SAR天线相位中心稳定度、SAR天线安装位置地面测量误差及卫星平台变形引起的SAR位置变化误差;第3类是坐标转换引起的误差,由GNSS测量基线向干涉基线转换过程中引入的,主要包括卫星平台姿态测量误差。综合考虑星上设备系统全寿命期变化及系统恶化,星间基线测量精度指标分配1.2 cm。
3.1.2 不同入射角和基线长度的精度仿真
根据地球南北纬度之间陆地坡度信息统计,为有效避免SAR成像盲区、叠掩区现象,在开展InSAR测绘工作的时候,卫星设计了中心入射角分别为32.42°、33.44°、35.04°、36.54°、37.89°、38.89°、40.04°、40.96°的8个波位用于对地成像,本节重点针对基线长度及SAR入射角开展理论仿真。
3.1.2.1 绝对平面精度
(1) 平地场景:平地区域绝对平面精度随基线长度变短而变差,理论分析结果优于12 m,结果如图4所示。
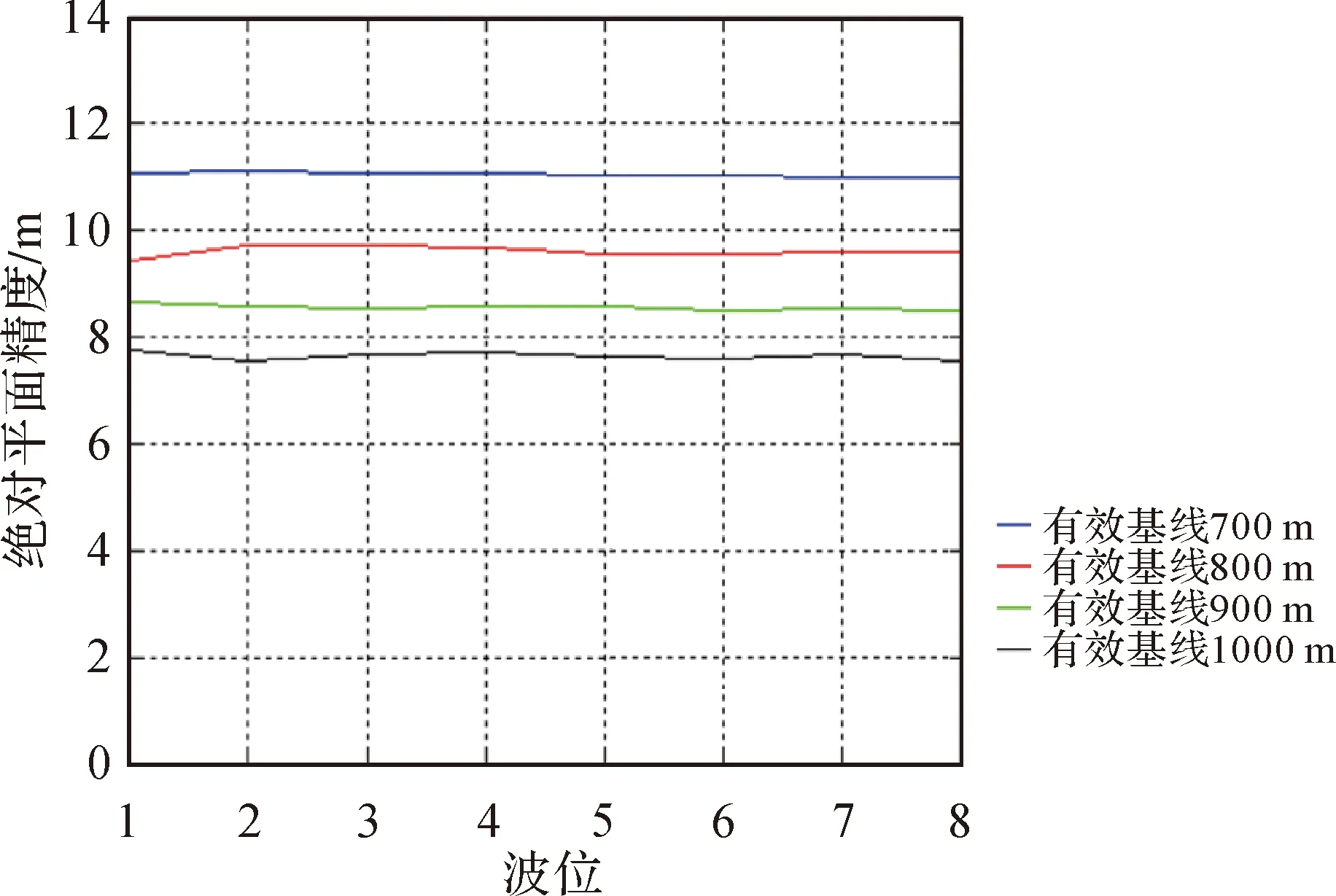
图4 绝对平面精度分析结果(平地区域)Fig.4 Analysis results of absolute plane accuracy(plane area)
(2) 山地场景:山地区域绝对平面精度随基线长度变短而变差,理论分析结果优于12 m,结果如图5所示。
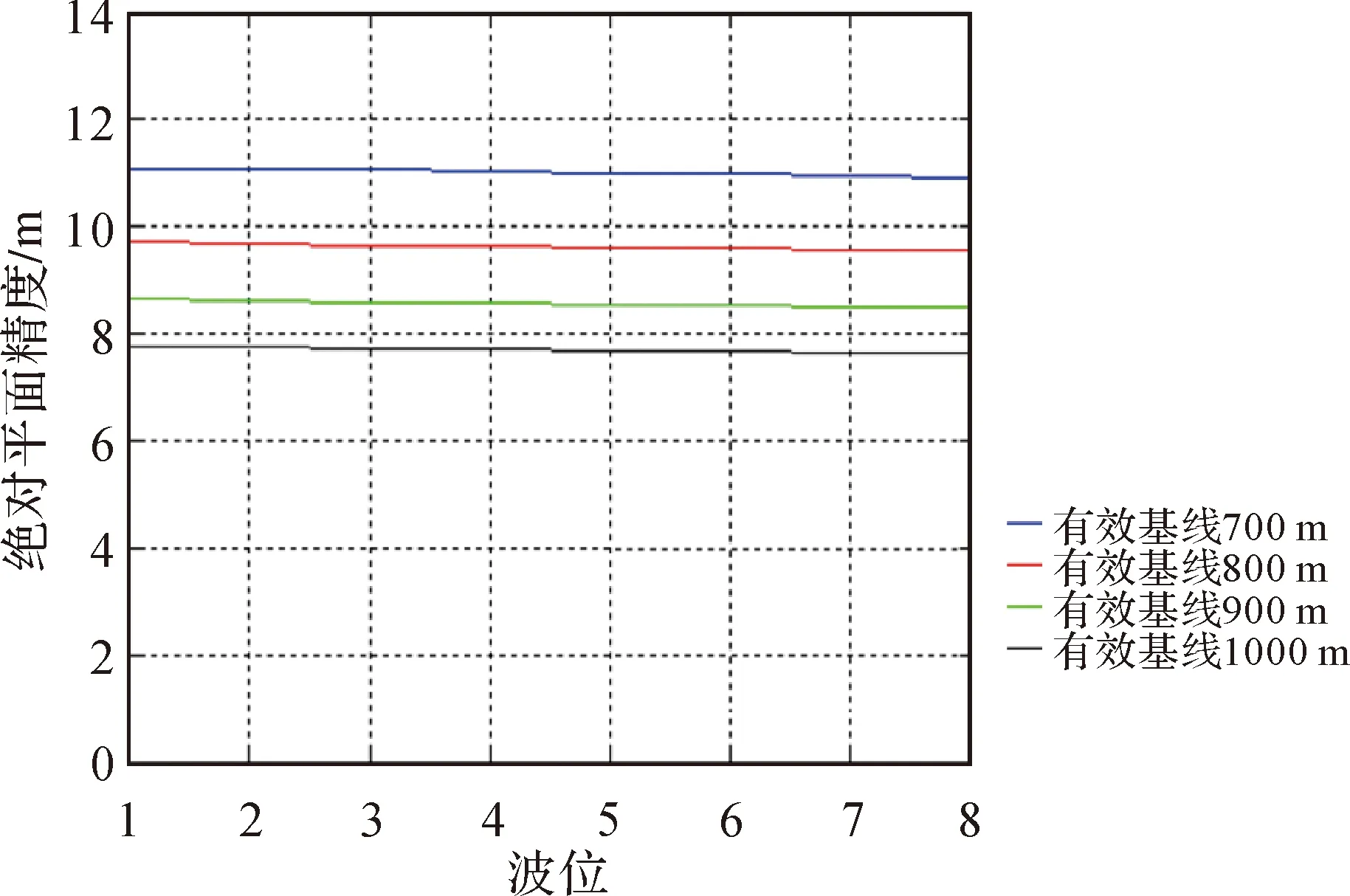
图5 绝对平面精度分析结果(山地区域)Fig.5 Analysis results of absolute plane accuracy(mountain area)
3.1.2.2 绝对高程精度
(1) 平地场景:平地地区绝对高程精度随基线长度变短而变差,随入射角变大而变差,理论分析结果优于10 m,结果如图6所示。
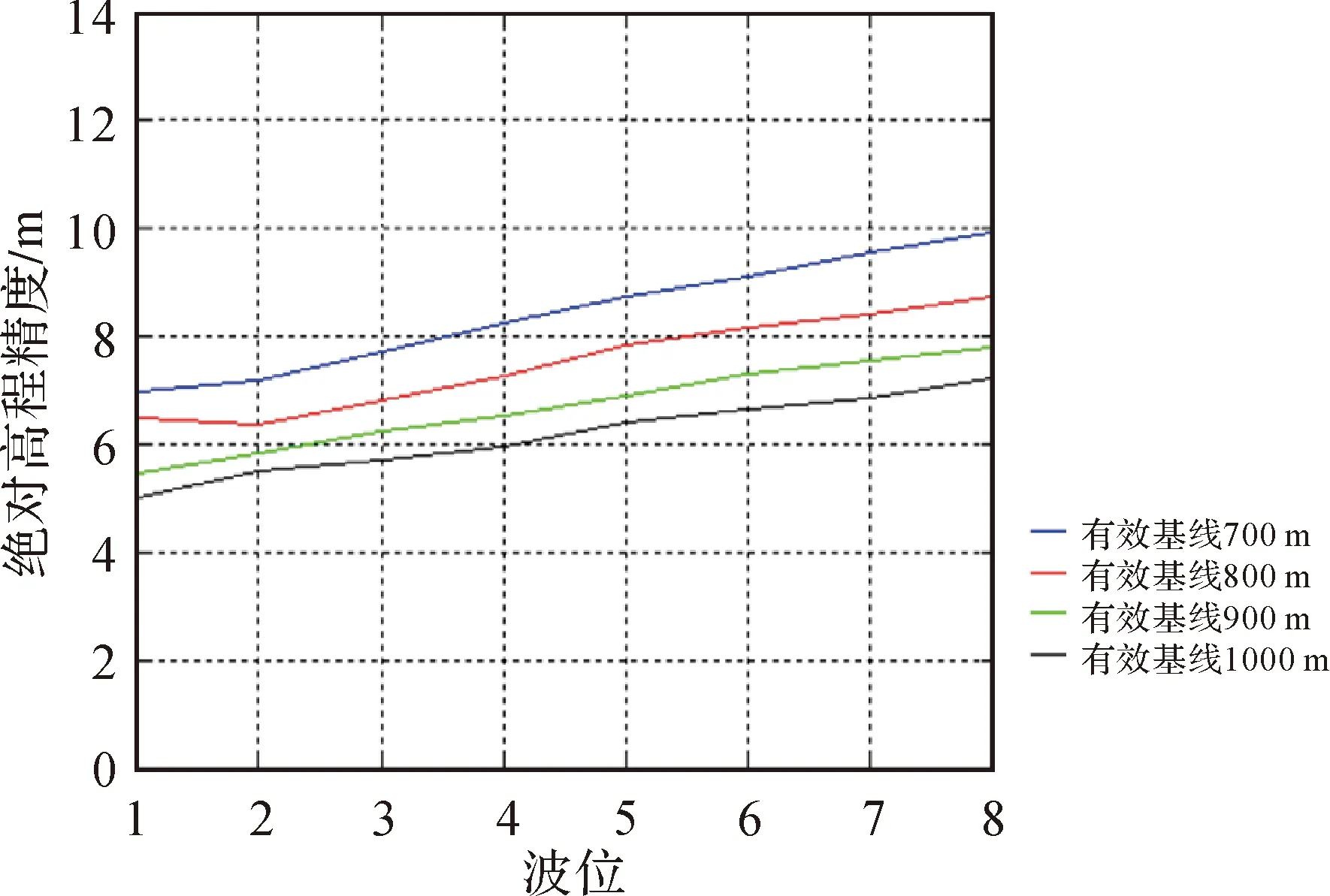
图6 绝对高程精度分析结果(平地区域)Fig.6 Analysis results of absolute elevation accuracy(plane area)
(2) 山地场景:山地区域绝对高程精度随基线长度变短而变差,随入射角变大而变差,理论分析结果优于10 m,结果如图7所示。
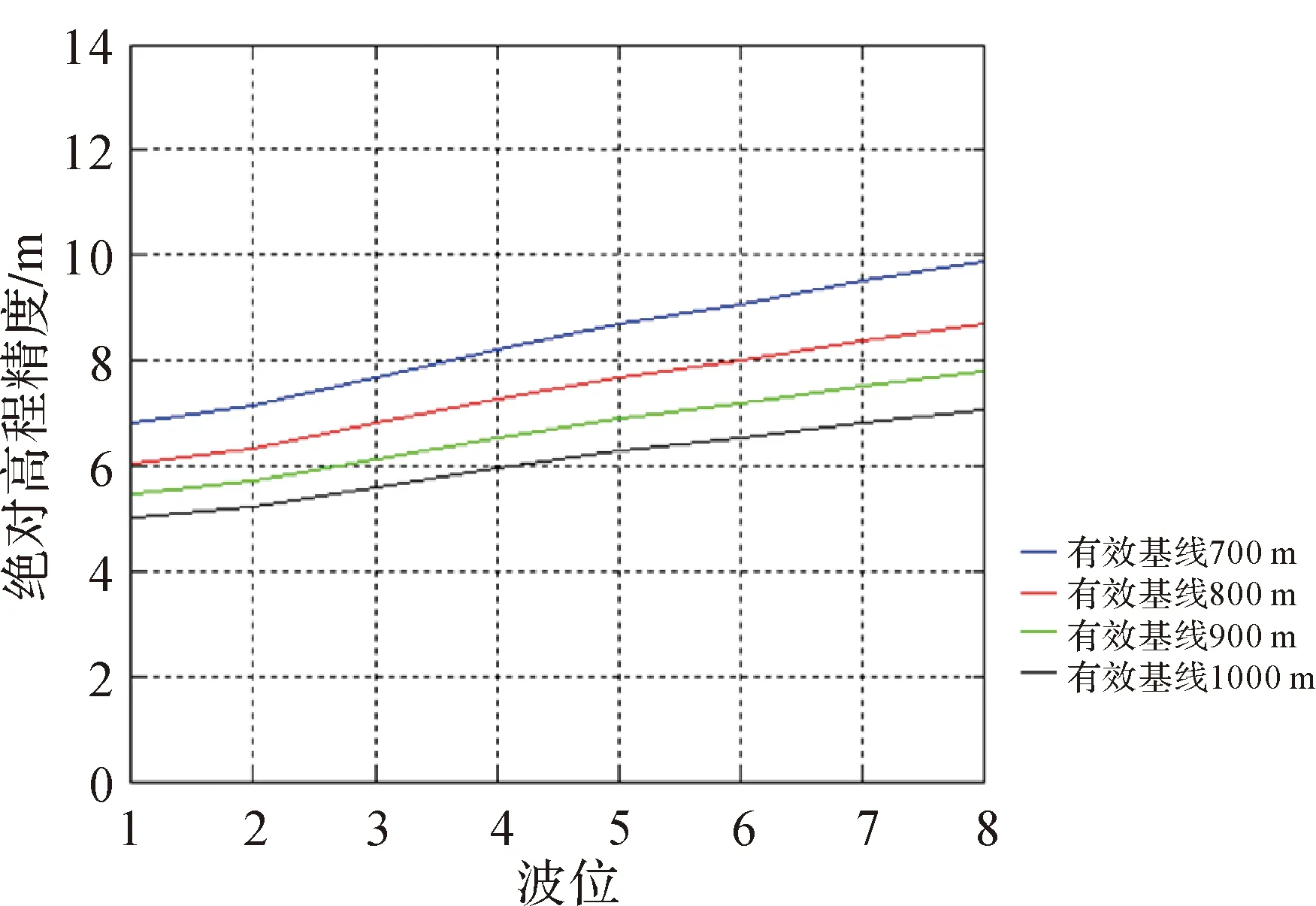
图7 绝对高程精度分析结果(山地区域)Fig.7 Analysis results of absolute elevation accuracy(mountain area)
通过方案阶段理论仿真分析可知:中纬度地区700~1050 m构型编队情况无地面控制下,平面、高程绝对定位精度在主基线区域满足1∶50 000比例尺地图的任务要求(研制任务要求为平地高程优于10 m、山地区域高程优于15 m及平面优于20 m)。
3.2 在轨定位精度测试
卫星系统发射入轨及系统调优后,综合考虑全球地形布局特点及在轨工作效率等要求,目前选取编队构形基线长度700~1050 m的中长基线运行。
本节定位精度相关指标测试重点针对上述影响定位精度误差因素中能够在轨实际测试的项进行。考虑到相位误差影响因素多,在轨不能实际测试,其中相位同步误差基本反映了系统自身SAR工作时相位误差情况,故采用卫星初样、正样研制过程中地面实际测试结果,相位同步周期选用雷达脉冲重复频率PRF的中间值256,初样星32次测试,结果为5.02°~8.31°,平均为6.11°;正样星112次测试,结果为3.93°~8.91°,平均为6.28°,均优于方案阶段10°设计指标。
以下涉及GNSS处理均为事后获取精密星历,同时需注意前面章节主星位置测量及速度测量的参考位置均为SAR天线相位中心位置误差分配,具体测试结果如下:
(1) 卫星GNSS定位测量试验。采用星上激光角反射器获得的位置作为单星位置真值评估的依据,间接对原始测量数据进行评估,并作为对GNSS(事后精密星历)定位处理精度复核的依据,在轨测试中仅考核卫星径向轨道确定精度。自2019年9月3日—2019年9月14日,采用上海天文台上海站和长春站两套激光测距设备对获取的13段激光测距数据进行分析,A星和B星的激光SLR检核残差总均方根分别为2.71 cm和2.57 cm。
(2) 卫星GNSS速度测量试验。鉴于无法采用真值进行比对,此处采用星载GNSS获得的数据进行不同方法的解算,并利用不同单位解算结果进行对比互差,作为单星速度评估依据,间接对原始测量数据进行评估,并作为事后处理精度的依据。A星5 d测试结果分别为:0.076、0.159、0.071、0.371、0.072 mm/s。B星5 d测试结果分别为:0.069、0.068、0.068、0.361、0.068 mm/s。
(3) 卫星斜距测量试验。在测试区布设角反射器,并精确测量其地理坐标,作为几何控制点,要求一景影像内布设不少于4个控制点(方位向、距离向各2个)。卫星在轨对其成像,成像数据下传地面后进行成像处理,利用定轨数据和主影像上控制点像点坐标计算得到测试结果,利用定轨数据和控制点地面坐标得到计算结果,将斜距的测试结果与计算结果进行比对,对不少于3个波位的多次成像结果进行统计计算。
整个测试分两个阶段,第1阶段未进行基线定标和斜距定标,A星斜距精度中误差测试2次分别为3.503、4.063 m;B星斜距精度中误差测试4次分别为4.3、4.269、4.689、4.763 m。第2阶段通过修正延时改正量(将理论延时改正量218.7 ns修改为217.739 8 ns),对斜距进行校正消除约4 m系统误差。而后利用干涉定标场再次测试斜距精度,A星斜距精度测试3次,分别为0.555、0.072、0.262 m,B星斜距精度测试14次,分别为0.106、0.237、0.024、0.112、0.107、0.227、0.129、0.164、0.058、0.068、0.126、0.156、0.729、0.791 m。
此外,利用收集到的少量澳大利亚角反射器控制点对南半球斜距精度进行了测试,与国内布设的专用角反射器相比尺寸较小、生成影像不佳(取点精度受到一定影响),测试结果平均值为1.2 m。
(4) 星间基线测量试验。在轨通过基线定标方法,利用地面控制信息确定星间基线测量误差。星间事后相对测量精度6次试验结果分别为5.873、7.319、7.272、5.013、7.579、2.676 mm。
(5) 根据在轨实测误差仿真平地几何精度。基于上述在轨实测各项误差因素取值范围,平地(坡度2°)几何精度检测仿真计算结果如图8所示。卫星远、近波位视角不同,这里给出分析结果包络,分析结果显示:裸土岩石地貌的低纬度地区(60°S~60°N),卫星相对高程精度优于0.79 m,绝对高程精度优于2.59 m,相对平面精度优于0.79 m,绝对平面精度优于2.79 m;裸土岩石地貌的高纬度地区(75°S~60°S、60°N~82°N),卫星相对高程精度优于0.79 m,绝对高程精度优于2.59 m,相对平面精度优于0.99 m,绝对平面精度优于3.49 m。
由于平地精度检测场位于45°N左右,在该纬度带裸土岩石地貌的平地区域,卫星相对高程精度为0.49 m,绝对高程精度为1.79 m,相对平面精度为0.54 m,绝对平面精度为1.99 m。
(6) 根据在轨实测误差仿真山地几何精度。基于上述在轨实测各项误差因素取值范围,山地(坡度15°)几何精度检测仿真计算结果如图9所示,卫星远、近波位视角不同,这里给出分析结果包络,分析结果显示:裸土岩石地貌的低纬度地区(60°S~60°N),卫星相对高程精度优于0.81 m,绝对高程精度优于2.61 m,相对平面精度优于0.81 m,绝对高程精度优于2.81 m;裸土岩石地貌的高纬度地区(75°S~60°S、60°N~82°N),卫星相对高程精度优于0.81 m,绝对高程精度优于2.61 m,相对平面精度优于1.01 m,绝对平面精度优于3.51 m。
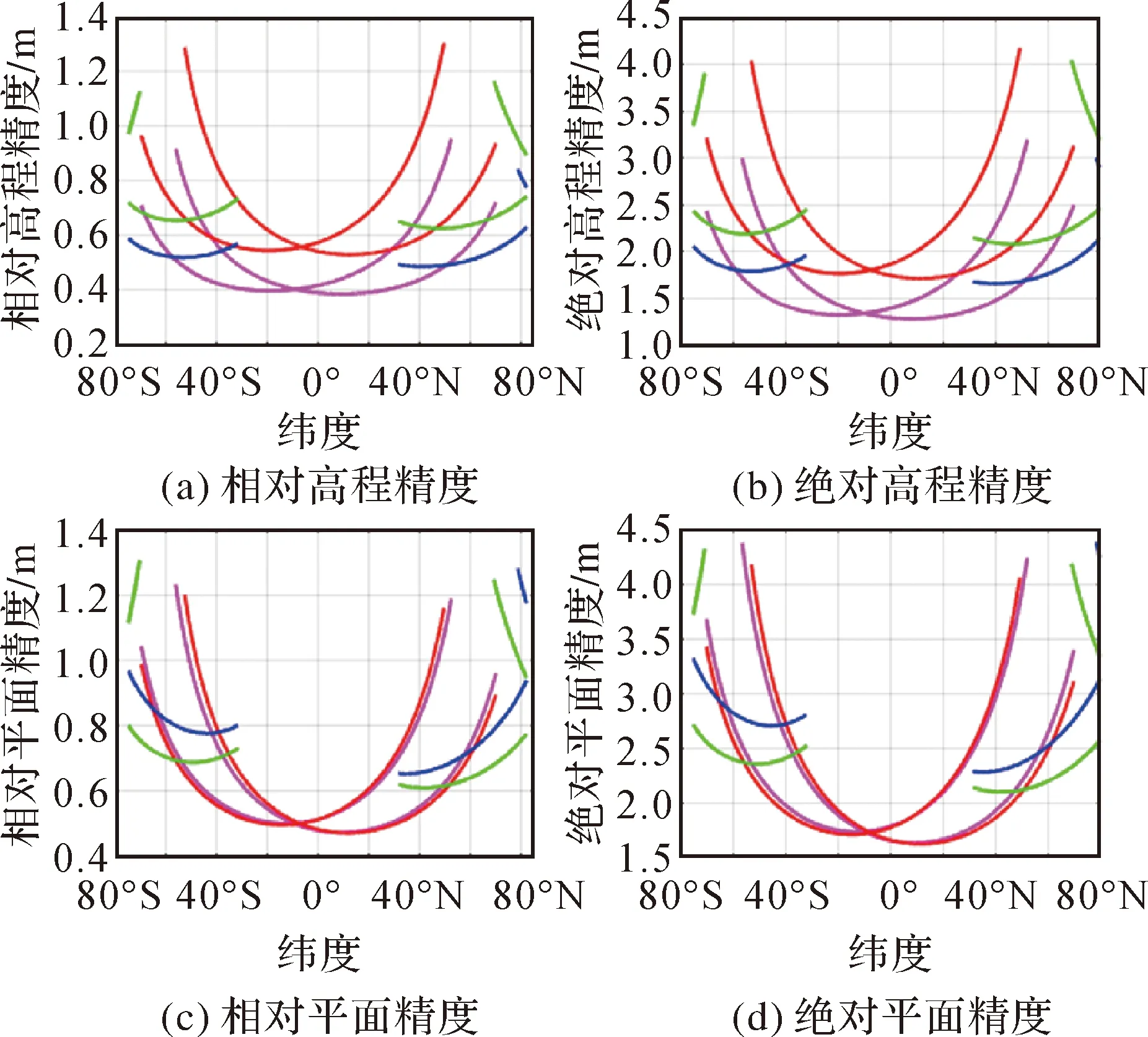
注:品红色曲线为低纬度近端波位分析结果,红色曲线为低纬度远端波位分析结果;蓝色曲线为高纬度近端波位分析结果,绿色曲线为高纬度远端波位分析结果;同色两条曲线分别表示卫星升、降轨情况。图8 平地区域定位精度仿真分析结果Fig.8 Analysis results of leveling positioning accuracy
注:品红色曲线为低纬度近端波位分析结果,红色曲线为低纬度远端波位分析结果;蓝色曲线为高纬度近端波位分析结果,绿色曲线为高纬度远端波位分析结果;同色两条曲线分别表示卫星升、降轨情况。图9 山地区域定位精度仿真分析结果Fig.9 Analysis results of mountain positioning accuracy
由于山地精度检测场位于40°N左右,在该纬度带,裸土岩石地貌的山地区域,卫星相对高程精度为0.51 m,绝对高程精度为1.81 m,相对平面精度为0.56 m,绝对平面精度为2.01 m。
(7) 平地区域几何精度实际检测试验。平地区域几何精度检测试验在进行干涉定标后,利用平地几何精度检测场在场内部署的四面角反射器开展几何精度检测。于2019年9月—2019年11月进行初步平地定位精度检测,绝对精度、相对精度测试结果中误差见表2。
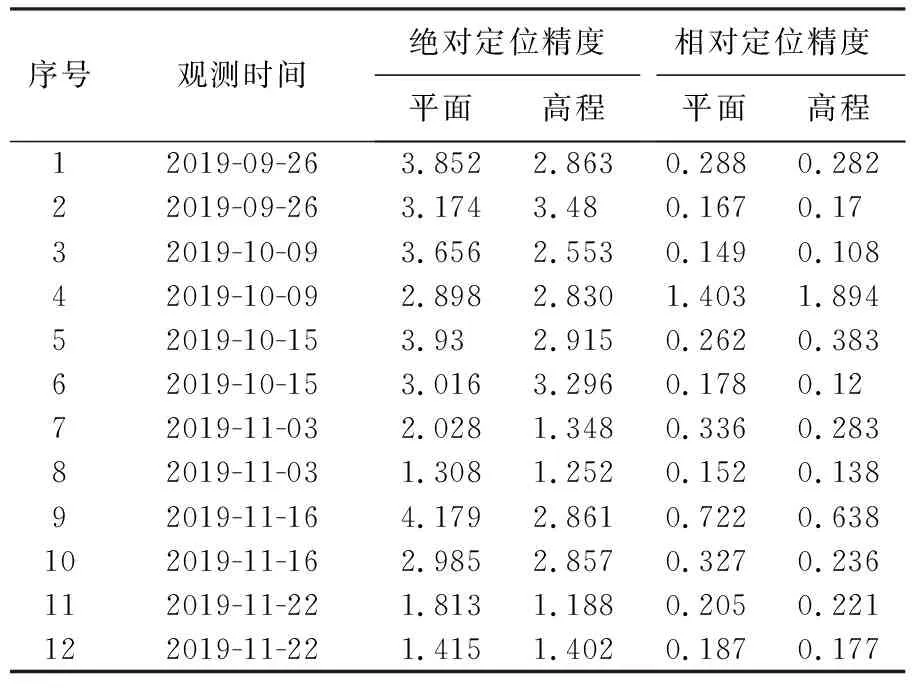
表2 平地区域定位精度检测结果
(8) 山地区域几何精度实际检测试验。山地区域几何精度检测场利用场内分散部署且已知坐标的10台角反射器作为控制点,开展几何精度检测。于2019年9月—2019年11月进行初步山地区域定位精度检测,绝对精度、相对精度测试结果中误差见表3。
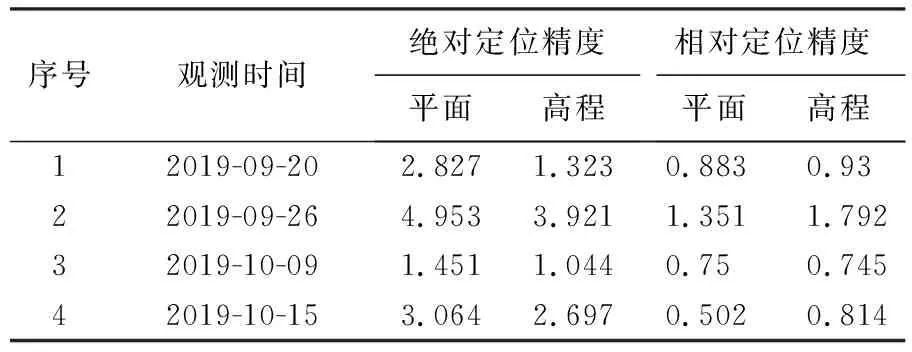
表3 山地区域定位精度检测结果
3.3 测试分析
利用影响精度误差项在轨测量值作为输入开展的地面仿真分析,与测绘几何精度在轨实际检测结果比较可以得出如下结论:
(1) 几何精度地面仿真分析结果与在轨实际检测结果相当,地面仿真分析与卫星在轨表现基本吻合。
(2) 由于受地面角反射器数量、测试周期和样本等现实条件限制,以及受检校场坡度、纬度、控制点测量精度等因素引入的测试误差影响,测绘几何精度在轨实测结果离散性略大于地面仿真分析结果。
(3) 由于山地几何精度检测场坡度仅有12°左右,对定位精度影响有限,故平地、山地测试结果比较相近。
考虑到测试试验样本选取较小,测试区域仅限国内,后续需要进一步加大测试范围,尤其是高差坡度比较大的区域测试。
4 结论与思考
4.1 结论建议
本文针对我国首发的分布式微波干涉测绘卫星系统—天绘二号卫星的定位精度进行了初探和浅析,对卫星地面方案设计阶段及在轨实测处理精度进行了比对分析,开展了InSAR定位精度平地区域、山地区域实际在轨测试试验,结果满足1∶50 000比例尺地图在平地区域、山地区域的技术规范要求(平地区域高程精度优于10 m、山地区域高程精度优于15 m及平面精度优于20 m)。在影响定位精度因素的主星SAR位置测量误差、主星SAR速度测量误差、主星斜距测量误差、干涉相位误差、星间基线测量误差5项中,星间基线测量误差对定位精度的影响较大,对平面精度的影响比对高程精度的影响大,并且基线越短,引入的误差越大,因此要求星间基线测量精度越高越好。
此外,结合实际工作经验,对后续分布式微波干涉测绘卫星系统的数据获取、处理及应用服务提出如下2点建议。
(1) 数据获取处理方面:后续在数据获取与处理方面严格控制、监测基线测量精度和干涉相位精度的同时,注意结合卫星编队构形、基线长短以及不同侧视克服地形高度、坡度带来SAR影像叠掩、阴影的问题,探索长基线立体SAR模式高精度控制点提取方法,微波立体测绘数据区域平差,光学、微波立体测绘数据及激光雷达数据融合等。
(2) 数据服务应用方面:目前的主要产品是DSM和雷达正射影像,还可以考虑挖掘SAR影像立体测图、D-InSAR等方面的潜力,在山地形变探测、城市地面沉降、灾情评估、交通监测、冰川监测、目标监视等领域开展研究[29-37]。
4.2 思考认识
星载InSAR技术作为一种新兴、实用的测绘技术,对测绘而言是一个跨时代的进步。与传统光学测绘手段相比,无论是数据获取方式、数据处理原理,还是作业处理流程,都存在巨大差异,必须建立全新的作业管理、规章、流程及质量控制标准等,具体情况如下:
(1) 高效的数据获取能力。作为主动式有源对地成像观测手段,InSAR卫星数据获取不受光照条件和云雨雾的影响,可在全球范围内实现全天候、全天时对地成像观测;同时与传统重复航过SAR数据进行干涉处理相比,影像相干性有质的飞跃,数据可用率高。
(2) 极大降低了对卫星姿态测量及控制精度要求。InSAR高程测量本质上也是三角测量,数学解答过程也是恢复摄影时刻的过程。相比于光学摄影测量定位精度敏感于姿态角变化,雷达摄影测量属距离成像,通过求解三角形边长进行定位,无须处理视轴夹角,同时涉及坐标系较少、没有转角,坐标转换简单。
(3) InSAR影像几何符合精度好,不存在光学成像CCD拼接、大视场光学镜头几何畸变及立体线阵之间平行性等问题。
(4) InSAR数据处理基本实现全自动。由于InSAR处理基于干涉相位信息,而相位信息与地面点到主辅两雷达天线相位中心距离有关,这反映的是地面几何特性,基本可以实现100%正确匹配,因此,可大大提高数据处理速度。
(5) 实现了无地面控制测绘难题。天绘二号卫星SAR载荷采用首尾双频工作,有效解决了相位解模糊问题。
