天绘二号卫星关键技术
2023-01-14楼良盛刘志铭钱方明张笑微
楼良盛,刘志铭,张 昊,3,钱方明,张笑微
1. 地理空间信息国家重点实验室, 陕西 西安 710054; 2. 西安测绘研究所,陕西 西安 710054; 3. 信息工程大学地理空间信息学院, 河南 郑州 450001
天绘二号卫星是基于干涉合成孔径雷达(interferometric synthetic aperture radar,InSAR)技术的微波测绘卫星系统,可以快速提取地面三维信息,与传统的光学遥感技术相比,具有全天候、全天时、数据处理自动化程度高等突出优点,其主要产品是数字表面模型和雷达正射影像[1-2],在无地面控制点条件下,精度与德国TanDEM-X系统[3-5]相当。天绘二号卫星可为我国基础测绘任务提供可靠的数据源,用于国家空间数据基础设施建设、自然灾害检测、大流域和河道治理、水利和电力建设等诸多领域[6-12];尤其用于中国多云雨地区无地面控制条件下的1∶5万比例尺的定位与测图,优势尤为突出。天绘二号卫星于2019年4月30日成功发射,使我国拥有了全天候、全天时获取全球地理影像的自主手段,摆脱了雷达遥感测绘数据长期依赖国外商业卫星的被动局面,标志着中国航天测绘事业迈上了新的台阶。目前,天绘二号卫星影像成果正在国防建设和国民经济中发挥着重要作用。
本文根据天绘二号卫星的技术体制,介绍其主要关键技术及解决途径。
1 InSAR测量原理
InSAR的工作原理如图1所示,在本质上仍然是三角测量,需要两个天线(A1、A2)在垂直于雷达平台运动的方向上分开放置以形成基线,基线两端与地面被观测点P构成三角形。InSAR在实施对三角形的求解时,是从地面被观测点P与两个天线的距离差入手的,而这一距离差是通过电磁波在被观测点与各天线间传播的路径不同所导致的相位差得出的。由距离差的不同引起相位差的变化即为干涉。
根据干涉原理与三角形几何关系,地面点高程h可以表示为[6]
h=H-r1cosθ
(1)
(2)
式中,Φ为相位差;B为基线长度,即雷达天线A2到天线A1在YOZ平面上的投影;δ为雷达天线A1、A2到地面点的距离差;β为基线的倾角;θ为雷达天线A1的侧视角;r1为雷达天线A1到目标点的距离;H为雷达天线A1的高度;n=1表示SAR单发双收,n=2表示SAR单发单收。
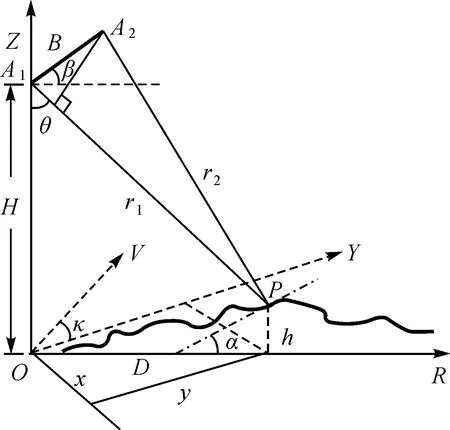
图1 InSAR原理Fig.1 The schematic diagram of the InSAR
由式(1)可知,求地面点高程h,需要解决这5个要素:相位差Φ、基线的长度B、基线的倾角β、雷达天线A1到目标点的距离r1、雷达天线A1的高度H。
地面点平面坐标(X,Y)可由式(3)得到[13]
(3)
由式(3)可知,求地面点平面坐标(X,Y),需要解决这6个要素:主雷达天线A1的平面坐标(Xs,Ys)、卫星飞行速度矢量(VX,VY,VZ)、中心多普勒频率fdc。
2 天绘二号卫星技术体制
根据InSAR测量原理,InSAR测绘系统必须具有两个分开放置的SAR形成干涉基线。天基系统实现方法有以SRTM[14-16]为代表的单卫星平台(或飞船、航天飞机)双天线体制,以及以TanDEM-X系统为代表的卫星编队体制。
基于单卫星平台双天线体制是在单个卫星平台上伸出一支能满足InSAR干涉要求的基线架,在基线架两端分别放两个雷达天线,形成干涉测量系统。该体制的两个天线同时对地面成像,可以彻底解决时间导致的相干性下降问题;同时基线架变形很小,可以提高基线测量精度。然而它必须首先解决空间长基线问题。由于长期以来没有找到可行的实现空间长基线的技术方法,至今单平台双天线体制只在美国航天飞机上的SRTM实现过。SRTM系统搭载在2000年2月发射的美国“奋进”号航天飞机上,由于受基线长度限制,其产品精度不高。技术难度大、风险高、耗资巨大,是该体制的突出缺点。
基于卫星编队体制是由多颗卫星组成编队,卫星相互遵循Hill方程[17]绕飞,卫星之间的间隔为数百米至数千米,整体构型相对稳定;卫星上分别装有雷达,同时对地面成像,形成干涉测量系统,无时间去相关效应。这种新概念为星载InSAR技术的实现提供了新的解决思路,通过编队卫星的构型设计可获得最佳基线,满足InSAR干涉的一系列条件。其代表为德国空间中心(DLR)的TanDEM-X系统。
根据我国现有技术水平,基于单卫星平台双天线InSAR方案的基线架及伸展技术难以实现,基线长度很难达到最佳要求;且伸展出去的天线存在颤抖,难以对其进行精确测量,这将影响InSAR测图精度。而基于卫星编队体制难度相对较小,且可以确保较高的产品精度,故天绘二号卫星系统采用基于卫星编队的干涉基线体制。
由此,天绘二号卫星系统由两颗对等的卫星组成,采用基于异轨道面绕飞卫星编队构型,编队卫星的轨道构型服从Hill方程,SAR载荷采用一发双收技术模式,如图2所示。在此技术体制下,分开放置的雷达所接收的信号具有较好的相干性,但发射与接收雷达之间必须要相互协调、相互配合,才能正常工作。为此,必须要求参与工作的所有雷达天线对准地面同一个目标[18],所有雷达知道雷达信号发送时间[19],所有雷达能够在整个合成孔径时间内精确掌握各回波的相位[20],即为空间、时间、相位三同步。

图2 天绘二号工作示意Fig.2 The working diagram of TH-2
3 天绘二号卫星关键技术
在该体制下,为了解决求地面点所需的要素,并确保系统相位精度及产品精度,天绘二号卫星系统除单SAR卫星具有的关键技术外,还有卫星编队、SAR载荷协同工作、高精度内定标、基线确定、高精度基线测量、高精度基线定标、高保相成像以及利用双频解算干涉相位绝对模糊数等关键技术。单SAR卫星具有的关键技术比较成熟,本文不再叙述。
3.1 卫星编队技术
卫星编队技术是确保形成干涉基线关键,包括编队构型设计、编队保持控制、编队构型重构及防碰撞4部分内容。
3.1.1 编队构型设计
对于近距离绕飞编队卫星系统,为了确保编队构型稳定,主、辅两星回归周期须相同,轨道倾角差Δa应为0,则辅星相对于主星的相对运动可以通过轨道坐标系(Hill坐标系,即X轴为地心指向主星质心方向,Y轴为卫星飞行方向,Z轴为右手法则方向)下辅星与主星的相对位置来描述,即
(4)
式中,p=aδe;l=a(cotiΔiy+Δu);s=aδi。
相对偏心率矢量Δe为

(5)
相对倾角矢量Δi为

(6)
上述各式中,轨道根数皆为平根;a、e、i、Ω、ω和M分别代表半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角和平近点角;下标1表示主星,下标2表示辅星;δe和θFF分别是Δe矢量的大小和相位;δi和ψFF分别是Δi矢量的大小和相位;Δu为两星相对平纬度幅角矢量。
由式(4)可知,通过辅星相对主星运动轨迹在XHOHYH平面内投影椭圆的短半轴p、辅星相对主星运动轨迹在ZH向上振幅s、相对偏心率矢量的相位角θFF、相对倾角矢量的相位角ψFF、主星相对编队构型几何中心在主星切向上偏移量l参数设计,即可进行编队构型设计。
天绘二号编队构型采用等半长轴、等倾角非共面设计原则(两颗卫星高度一致,相对倾角矢量的相位角ψFF固定为90°),通过选择主、辅星之间的赤经差(辅星相对主星运动轨迹在ZH向上振幅s不同),使两星之间在轨道平面外拉开(在赤道附近编队构型参数z向分量最大),这种构型设计具有很强的被动稳定性,可以保证卫星的防碰撞安全性。
3.1.2 编队构型保持控制
编队构型在空间摄动的影响下会逐渐发散偏离标称值,从而影响卫星系统工作,需要进行保持控制。编队构型由两颗卫星的相对轨道根数决定,因此编队构型控制最终变成对编队卫星的相对轨道根数调整控制。根据相对运动控制方程,对各相对轨道根数调整分成轨道面外参数调整和轨道面内参数调整。编队构型平面外控制参数主要为相对倾角矢量的调整,控制方式采用单脉冲控制方式,根据需要的调整量,选择相应的点火位置,进行平面外参数的控制。平面内控制采用三脉冲控制方式,实现对相对偏心率矢量、相对半长轴、相对纬度幅角等平面内参数的控制。控制推力采用切向推力,由不同编队推力器组合来实现。
编队构型保持控制包括星地联合控制和星上自主控制两种模式。星地联合控制模式中,地面控制中心基于测控站获得两星相对状态信息与设定任务的编队构型信息计算偏离值,由偏离值确定星上推力器的控制时机与控制量大小,通过上注指令,对辅星实施保持控制;星上自主控制模式中,由星上星间测量分系统获取两星相对状态信息,卫星根据相对状态信息与设定任务的编队构型信息获取偏离值,确定星上推力器的控制时机与控制量大小,对辅星实施保持控制。其流程如图3、图4所示。
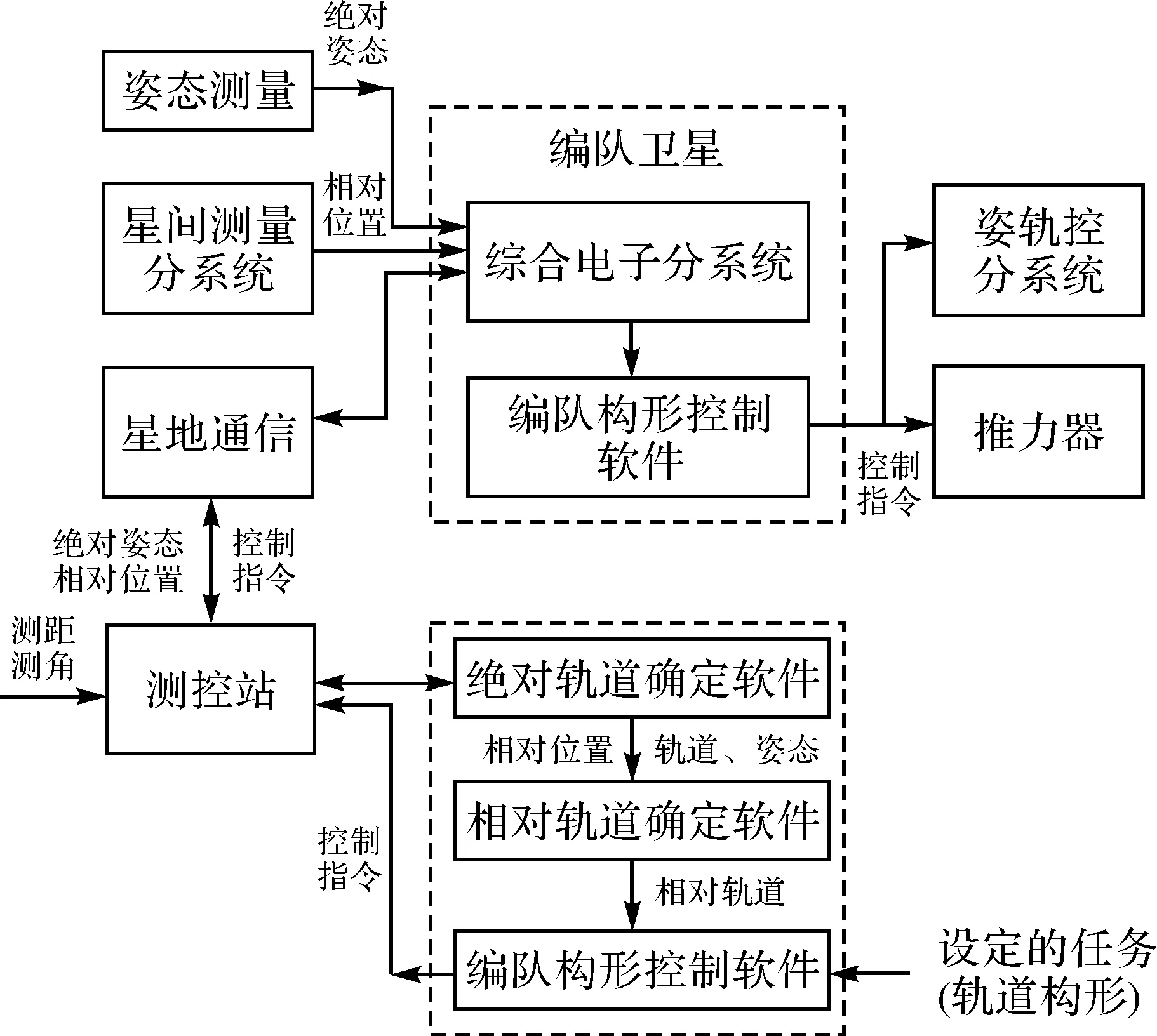
图3 星地联合控制流程Fig.3 Flowchart of satellite-ground joint control
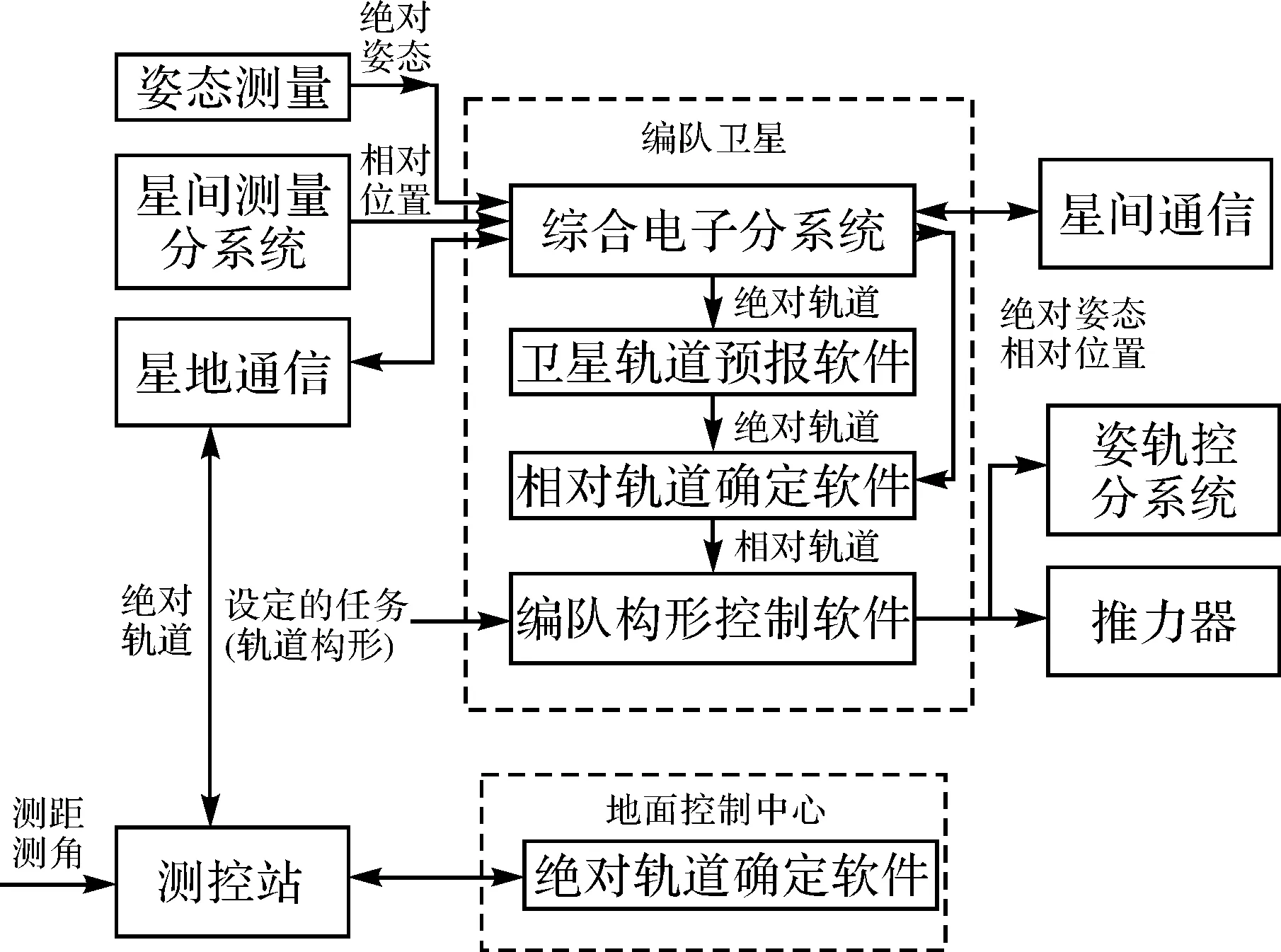
图4 星上自主控制流程Fig.4 Flowchart of on-board autonomous control
3.1.3 编队构型重构
编队构型重构主要完成各种编队构型之间的相互转换,采用星地大回路控制方式。在进行编队构型重构时,首先采用单脉冲控制方式进行轨道面外轨道参数的控制,然后采用两脉冲或三脉冲控制方式进行轨道面内的参数控制。
在进行编队重构时,由于理想构型在编队沿航向的距离相差较大,半长轴的偏差会引起卫星编队的构型沿航向长期的漂移,出于燃料节省的考虑,轨道面内的参数控制采用多轨沿航向漂移实现编队重构。
3.1.4 防碰撞
防碰撞规避策略主要从构型设计、控制系统设计和防撞规避措施3个层次进行了设计。
为了最大限度地减小两星发生碰撞的概率,卫星编队构型设计采用等半长轴、等倾角非共面的设计原则。目前所设计的编队构型均满足该原则,并且保证了两星在XHOHYH面内相对距离大于150 m。
控制系统防撞设计主要从相对导航与编队控制策略的工作状态检查与验证、推力器限喷措施设计、编队初始化安全接近设计、单机可靠性措施以及故障诊断进行专项设计,防止由于相对导航与控制算法验证不足、推力器限喷措施不到位、单机和系统故障等导致的两星碰撞风险。
防撞规避措施是指一旦出现两星相距小于安全阈值的紧急情况,卫星系统即采取撤离控制措施,避免碰撞的发生。为了尽快拉开两星的相对距离,采用主星单脉冲切向喷气的控制方式。
3.2 SAR载荷协同工作技术
在一发双收SAR工作模式下,双星需要协同工作才能获取有效干涉数据,主要体现为时间、空间、相位三同步。
3.2.1 时间同步
时间同步的目的是使双星SAR之间工作时间一致,以便在同一时间点上录取地面回波,确保主辅星SAR录取的回波在距离向的重合。时间同步是由高稳定80 MHz基准频率信号、高精度PPS秒脉冲信号对、PPS秒脉冲之间的高精度时差共同保障。时间同步可分为建立和保持两部分。
时间同步建立指在某一时间点,两同步时钟的时间读数相同。星间测量分系统提供的高稳定基准频率信号、高精度PPS秒脉冲信号、PPS秒脉冲间的高精度时差数据,经SAR载荷雷达射频子系统,产生高稳时钟信号后送雷达控制子系统,作为定时基准时钟,并产生系统所需高稳定时间。高精度时差数据经卫星综合电子送雷达控制子系统,由时差数据控制监控定时模块对超前的PPS秒脉冲进行延时控制。通过PPS秒脉冲触发雷达控制子系统的监控定时模块,产生高一致的雷达定时信号,实现双星时间同步建立。一次时间同步建立如图5所示。

图5 时间同步建立Fig.5 Time synchronization establishment
时间同步建立后,在一次成像工作时间内,需进行时间同步保持。它表示完成时间同步建立后,两同步时钟时间走时的一致性。时间同步保持是通过星间测量分系统提供的高稳定基准频率信号的高精度和它们之间的高一致性,维持主辅星SAR定时信号之间的差别。高稳定基准频率信号由星上自带铷钟驯服晶振实现,铷钟具有长稳特性,而晶振具有短稳特性,用铷钟驯服晶振实现基准频率信号的长期高稳定性。
3.2.2 空间同步
空间同步的目的是保证主辅星SAR天线的波束在地面有足够的重叠,以保障被动接收的辅星能够获取高信噪比的SAR回波信号。空间同步采用最大能量法和最大相干法两种方案。
最大能量法的同步方案,即“辅瞄主”模式,通过对辅星导引规律的偏置,在不考虑波束指向误差的情况下,可使辅星波束脚印与主星波束脚印重合,从而使辅星接收到的回波能量达到最大。该方案下,主辅星波束中心指向测绘带中心同一点。对于辅星雷达而言,它的方位向天线方向图是主星方位向发射天线方向图和辅星方位向接收天线方向图合成的有效天线方向图。这使系统发射天线方向图和接收天线方向图峰值重合,这时系统信噪比去相干影响较小,但对多普勒去相干影响较大。
与最大能量法相比,最大相干法并不要求主辅星波束中心同时指向地面同一点,而要求主辅星分别按照各自的偏航、俯仰二维导引规律将波束照射在同一个测绘带内,这样主辅星回波多普勒中心频率基本相同,保证了较高的多普勒去相干。一般情况下,同步后的波束在方位向不完全重叠,主辅星波束中心不指向同一点,辅星信噪比会有所下降,因此会影响信噪比去相干。
偏航、俯仰二维导引改正值工程上可简单表示为


对于天绘二号卫星编队,经仿真分析,在空间同步误差相同的条件下,信噪比去相干非常有限,而多普勒去相干影响较大。因此,天绘二号采用最大相干法作为空间同步主方案,将最大能量法作为备选方案。
空间同步的实施过程主要涉及卫星两大分系统:姿轨控分系统和SAR分系统。姿轨控分系统是空间同步的执行系统,负责二维导引规律的实施,满足卫星姿态指向精度的要求;在此基础上SAR分系统须保证各个波位的波束指向精度满足相应的指标要求。
最大相干法空间同步实现方案如图6所示。
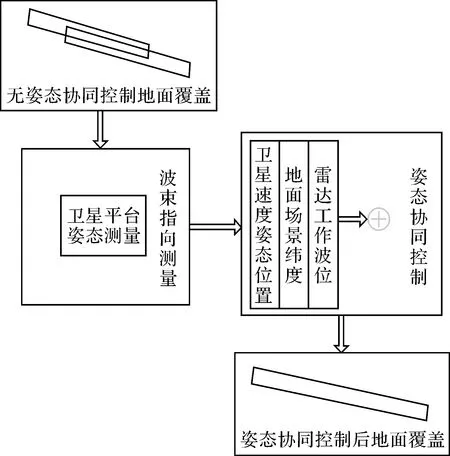
图6 最大相干法空间同步方案Fig.6 The space synchronization scheme based on maximum coherence method
3.2.3 相位同步
相位同步的目的是建立主辅星SAR间共同的相对相位参考,使主辅星SAR的回波信号具有相参性,确保获得满足干涉测高要求的相位差。天绘二号卫星相位同步采用基于双向信号交替传输的方案,可分为星上双向信号交替传输的同步信号采样和地面数据处理补偿两部分。星上部分主要完成主、辅星SAR载频相位差信息的获取;地面部分主要完成辅星SAR回波的相位补偿。相位同步工作示意如图7所示。
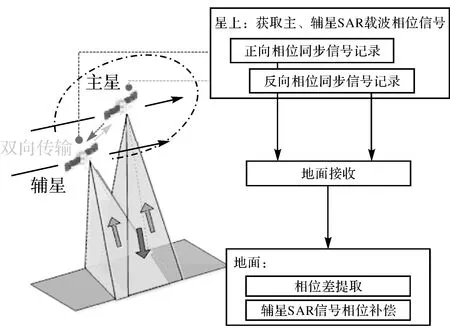
图7 相位同步工作Fig.7 Phase synchronization
根据相位同步原理,补偿的相位差值求解如下。
设主星雷达的频率源相位为
φ1=2πf1t+φ01+n1(t)
(7)
辅星雷达的频率源相位为
φ2=2πf2t+φ02+n2(t)
(8)
辅星雷达接收到主星雷达的地面回波相位为
φ12=φ2-φ1=
φ02-φ01+n2(t)-n1(t)
(9)
式中,fi为主辅星SAR的标称中心频率;φ0i为主辅星载频的初相;ni为主辅星相位噪声;ri为主辅星到地面目标点距离,i=1为主星,i=2为辅星;t为一个相位同步交替传输过程的起始时刻;c为光速。
根据InSAR测量原理,与高程相关的干涉相位应只与雷达回波历程r1、r2有关,故相位同步目的是在辅星的相位φ12中去除掉φc值,即
φc=2π(f2-f1)t+φ02-φ01+n2(t)-n1(t)
(10)
消除相位φc的过程即为相位同步。
相位同步的星上部分由星间状态测量分系统、SAR分系统共同承担。星间状态测量分系统为有效载荷提供高稳定的频率基准,保证独立工作在两星上的频率基准高精度地相对一致,为有效载荷相位同步奠定了基础。SAR分系统采用同步喇叭双向传输相位同步信号的方案获取主、辅星SAR载波间相位差信息,即主星将相位同步脉冲信号通过星间链路发送给辅星,经辅星解调后采集相位同步信号并随雷达回波数据下传至地面;同样,主星也接收、解调辅星发来的同步脉冲信号,并下传至地面。
相位同步的地面部分是在主辅星InSAR数据成像处理前,从回波数据中提取相位同步数据,恢复出主、辅星SAR载波间相位差值,补偿辅星SAR回波的相位,实现相位同步。
在雷达工作期间,最先建立时间同步,然后依靠两个高稳频率基准保持到成像结束;空间同步在时间同步之后进行,随后周期性进行调整;相位同步在空间同步的后期开始,然后在雷达回波录取期间周期性进行。雷达系统干涉成像回波的录取在三同步的保持期间进行。
3.3 高精度SAR内定标技术
内定标是标定雷达成像信号在SAR载荷发射与接收通道中的幅相变化。这些幅相变化叠加在回波信号上,不仅导致地面目标的反射强度出现误差,同时导致干涉相位出现误差,直接影响测高精度。
内定标实现方法有延迟内定标和非延迟内定标两种。在延迟内定标方法中,内置了光纤延迟线、放大器等有源部件,开机相位具有随机性,而且相位稳定性差、温漂大、链路对消性差,难以实现高精度内定标要求;在非延迟内定标方法中,采用全无源的设计,可实现更好的幅度和相位稳定性,定标精度高,但需要解决回波链路与定标链路隔离度和不同模式下SAR载荷链路功率电平匹配等问题。
天绘二号采用了非延迟内定标技术,相应的控制措施包括:主辅星SAR采用相同的软硬件设计,通过地面测试和筛选,确保主辅星SAR硬件相位特性的高一致性;通过采用长加电、提前开机预热、有源部件温度补偿等方式,使得系统的相位特性变化在工作期间控制在可承受的范围内;通过针对性的热控系统设计,使得SAR载荷的工作环境温度控制在±3°范围内,保证了主辅星SAR载荷的相位稳定性和一致性。
天绘二号的内定标由内定标网络和内定标器组成的定标链路实现。内定标网络针对天绘二号的特殊需求,设计了既可实现对SAR信号硬件通道进行定标,也可对相位同步通道进行定标。该方案充分考虑了不同定标方式的信号流和信号电平的需要,保证内定标性能。
内定标器用于标定雷达开机期间,以及多次开机之间通道幅度和相位的变化量,并据此进行补偿,因此内定标器的设计就成为影响雷达通道幅度和相位标定性能的关键环节。内定标器是内定标信号链路中的核心单元,它完成各种内定标模式的回路转换和电平转换,与天线阵面定标网络一起实现SAR系统内定标功能。
内定标模式有:噪声定标、参考定标、全阵面发射定标、全阵面接收定标、单面板发射定标、单面板接收定标、模块级发射定标、模块级接收定标、相位同步发射定标、相位同步接收定标、单T/R通道发射定标、单T/R通道接收定标、首尾定标中插发射定标、首尾定标中插接收定标、成像中插发射定标、成像中插接收定标、成像中插参考定标、成像中插相位同步发射定标、成像中插相位同步接收定标、逐行发射定标(与插发射定标共用控制码)及逐行接收定标(与单模块接收定标共用控制码),共21种。通过这些定标模块及其组合,可以形成更加复杂的、可支撑不同定标目的的内定标,实现对SAR分系统的全面内定标。
内定标组合从功能上可以分为数据定标和监测定标两类。数据定标是在每一次数据获取中实施,分为首尾定标和成像中定标,服务于单次干涉成像数据;监测定标视系统性能变化的情况,按监视与修正的需要实施,服务于SAR分系统通道标定。
3.4 高精度基线测量技术
根据InSAR原理,求解地面点高程,需要已知基线长度和基线倾角。天绘二号基线测量采用GNSS(兼容GPS和BD2)双频载波相位差分测量体制,通过相对定轨,实现星间高精度基线测量。
由于GNSS获取的观测数据在GNSS天线相位中心位置,相对定轨采用卫星质心位置,而InSAR处理使用的基线是SAR天线相位中心连线,故须将GNSS观测数据从天线相位中心位置转换到卫星质心,再将相对定轨后的数据转换到SAR天线相位中心位置,完成星间高精度状态测量。由此,基线测量的主要包括GNSS和SAR天线相位中心的确定和高精度测定、坐标转换、相对定轨3部分。其中,GNSS和SAR天线相位中心的确定和相对定轨是关键。
GNSS和SAR天线相位中心确定的前提是天线相位中心稳定。为确保GNSS天线相位中心稳定,采取了3项措施。一是宽频带设计,GNSS天线采用带耦合环的十字交叉振子天线形式;二是3D扼流圈设计,提高了天线抗多径性能,抑制了星体对天线的影响,又缓解了主极化能量滚降效果,确保了天线大仰角范围内相位变化平缓;三是带星体联合仿真优化设计,通过将天线联合整星进行仿真,对天线结构参数进行优化,确保天线相位中心稳定性满足要求。SAR天线相位中心的高稳定性依靠SAR天线上每个T/R组件幅相特性的稳定性以及高精准SAR天线温度控制实现。
GNSS天线较小,相位中心可以直接在暗室进行标定。天绘二号GNSS天线需要在卫星底板上进行天线相位中心的标定,由于卫星底板尺寸大,要求测试系统静区≥1.4 m,推算可知,远场距离需要>16.5 m,西安海天公司的SATIMO-SG128多探头球面近场测试系统可以满足要求。由于天绘二号SAR天线大,且波束由多个T/R组件合成,相位中心无法直接在实验室进行标定,只能通过分析确定。根据相控阵天线的特点与使用方式,相控阵天线的相位中心定义为:使相控阵天线远场能量波束宽度内相位平坦的参考点,根据天绘二号高程测量精度要求指标分配,相位平坦度应优于2°。根据定义相控阵天线的相位中心不反映全空间的相位关系,只描述波束宽度内各角度相位的相对值,由此可以认为相控阵天线的相位中心应为天线阵面几何中心。
相对定轨技术采用GNSS的双差观测值定轨方法,需要解决高精度的相对动力学模型、卫星频繁机动控制、观测数据异常误差和系统误差等问题。解决思路是在编队卫星相对定轨时固定参考星轨道,直接估计两颗卫星的相对轨道,在此基础上,采用两颗卫星动力学数值积分之差作为相对状态参考值,采用辅星状态转移矩阵作为相对状态转移矩阵的方法,解决没有高精度相对动力学模型的难题。采用以TurboEdit算法为主,结合其他算法剔除粗差及探测周跳;采用附加参数法,通过模型补偿控制系统误差的影响,将抗差估计理论应用于编队卫星精密定轨,通过抗差估计控制异常误差的影响。
3.5 基线确定技术
天绘二号卫星采用卫星编队方式实现干涉所需基线,两颗卫星间相互关系遵循Hill方程,由此,主、辅星在飞行方向位置将错开,这就使主、辅雷达对同一回波的多普勒产生变化,具体表现为整个多普勒频带的移动,多普勒带宽如图8所示,图中X轴为卫星飞行方向。由图8可知,对于同一地面点P,主星成像时刻为t1,辅星成像时刻为t2,此时两幅SAR影像相干性较差,需要进行预滤波[21-22],去掉多普勒频谱中不相干部分,以提高主、辅影像的相干性,此时的合成孔径为图8中的成像合成孔径。因此,InSAR高程测量需要的基线是图8中主、辅星成像合成孔径的中心位置连线B,即主星成像t3时刻SAR天线相位中心和辅星成像t4时刻SAR天线相位中心的连线,而不是t3时刻两颗卫星之间的间距。需要通过主、辅影像配准,利用同名点确定辅星成像时刻t4。天绘二号卫星雷达回波和GNSS观测数据基于统一的时间基准,故分别找到绝对时间t3、t4时刻主辅星GNSS相对定轨数据,即可得到InSAR处理所需的基线值。

图8 多普勒带宽示意Fig.8 The schematic diagram of Doppler bandwidth
3.6 高精度基线定标技术
基线定标可以看作是InSAR定位的逆过程,即用地面控制信息交会出真实基线矢量,其目的是消除系统误差。天绘二号卫星基线定标利用近、远波位数据入射角差异大的特点,构建了近、远波位两景数据联合处理的二维基线定标方法[23-24],可实现二维基线的高精度求解,基线定标精度为毫米级。其数据获取策略如图9所示。
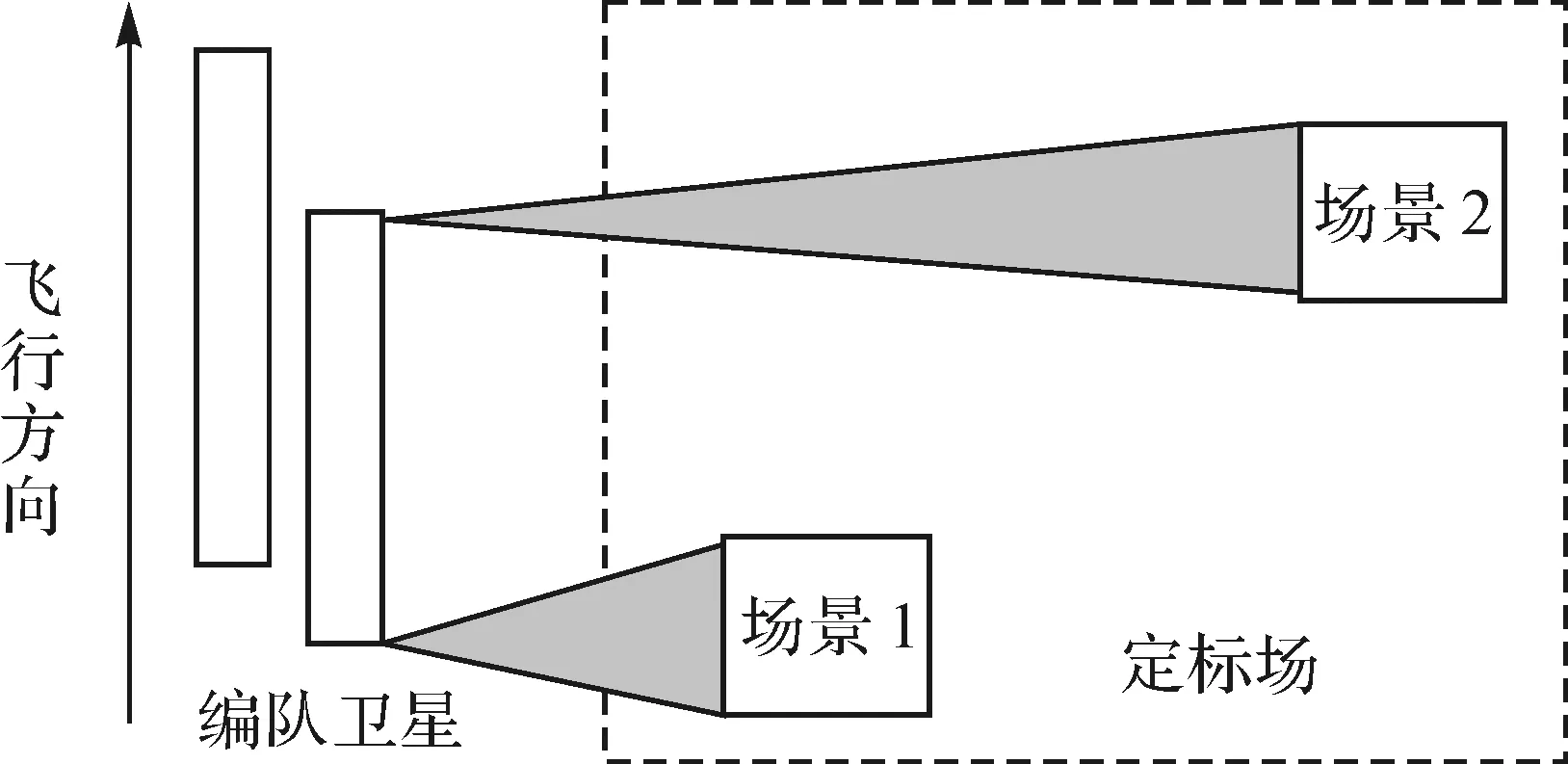
图9 数据获取策略Fig.9 The strategy of data acquisition
近、远波位联合定标模型首先将基线误差分解为平行基线误差δB‖和垂直基线误差δB⊥,平行基线误差求解公式为
(11)
式中,λ为雷达波长;δh为场景中的地面点高程误差;Hamb为系统模糊高度。
然后根据短时间内相邻两景数据对应的基线误差相等列出等式为
Bbias=δB‖1·B‖1+δB⊥1·B⊥1=
δB‖2·B‖2+δB⊥2·B⊥2
(12)
式中,Bbias为基线误差;B‖、B⊥分别为平行基线和垂直基线在局部坐标系中的单位向量,1表示第1个场景,2表示第2个场景。根据式(12)可求解出两景数据对应的垂直基线误差,从而得到基线矢量误差。
为了实现基线定标要求,在新疆和河南分别建设了两个200 km×100 km的数字定标场。
天绘二号卫星系统利用该技术进行定标后,对河北赤城山区布设的10个角反射器的定标前后定位精度进行了比较,其结果见表1。定标对定位精度的提高效果明显。
表1 定标前后定位精度对比
3.7 高保相成像技术
因相位精度对InSAR测高精度影响较大,高保相成像目的是在成像过程中确保相位精度。SAR成像流程如图10所示[25]。

图10 SAR成像流程Fig.10 Flowchart of SAR imaging
为了减少成像过程中对相位精度的损耗,天绘二号采用双基成像技术。双基成像的几何模型如图11所示,主星向地面发射电磁波信号,一段时间后主辅星分别接收地面的回波信号,造成多普勒中心估计和距离徙动校正与单基成像不一样。为了精确成像,主辅星均采用双基成像模型处理,下面以辅星成像为例做进一步的解释。辅星在进行零多普勒成像时,对于场景中的任意目标点Pt,其在t0时刻(即主星发射电磁波信号的时刻)主星的多普勒频率f0与t1时刻(辅星接收地面回波信号的时刻)辅星的多普勒频率f1之和为0;距离徙动校正的距离应为R0+R1。同样,对于主星,也要保证目标点Pt在t2时刻(即主星发射电磁波信号的时刻)主星的多普勒频率f2与t3时刻(主星接收地面回波信号的时刻)辅星的多普勒频率f3之和为0;距离徙动校正的距离应为R2+R3。

已知某条距离线的电磁波发射时间为T0,则距离向第n个采样单元的回波接收时间T1可以表示为
(13)
式中,PRT为脉冲重复时间;m表示回波延迟时间的PRT整周数;ΔT表示延迟时间的小数部分。m·PRT+ΔT对应距离向第1个采样单元的回波延迟时间。

图11 双基成像几何Fig.11 Bistatic imaging geometry
如果已知目标点的地理坐标以及主星的发射位置和速度,可以搜索出辅星的零多普勒接收位置,该位置作为理想接收位置,记为P1,按照式(13)计算出来的辅星位置为实际信号接收位置,记为P2。目标点到理想接收位置P1的斜距记为R1,目标点到实际接收位置P2的斜距记为R2,那么由斜距差引起的相位差可以表示为
(14)
式中,λ表示雷达波长。
补偿相位差之后,同一距离线上的点均为零多普勒成像。对于实测数据,目标点的地理坐标可以借助观测场景的先验DEM进行SAR定位来获取。
辅星双基成像的处理流程如图12所示。
3.8 双频解干涉相位绝对模糊技术
单个SAR回波信号中只记录了[-π,π]间相位,2π的整数相位因无法记录而丢失,导致InSAR干涉相位差中2nπ相位丢失。1景影像内相对某点(通常是左上角点)干涉相位差的2nπ相位可以通过相位解缠获得,而该点丢失的2nπ相位即为绝对相位,n值为干涉相位绝对模糊数,干涉相位绝对模糊数一般采用控制数据求解。

图12 辅星双基成像的处理流程Fig.12 The processing flow of assistant satellite bistatic imaging
天绘二号系统在国际上首次提出通过系统设计首尾双频成像模式,解决干涉相位的绝对模糊数求解问题,这使卫星系统一次开机成像分为首、尾双频成像和中间干涉DSM获取成像3部分。首尾分别利用主频9.6 GHz和辅频9.44 GHz两个频点进行5 km×5 km左右的双频成像,形成两个频点的干涉成像对。双频中主频点与完成干涉DSM获取任务的频点一致,都为9.6 GHz,工作参数也相同。且卫星开机数据获取时,双频成像与单频的干涉DSM获取成像无缝连接。
通过对首尾两个主辅双频地面回波数据的双频干涉处理,即可获取主频干涉相位中的绝对相位2nπ,其主频干涉相位差的模糊通过成像中与干涉DSM获取的单频成像的连接,传递给单频干涉DSM获取成像部分,从而解决干涉测高中的绝对模糊数求解问题。
采用双频确定绝对相位2nπ的基本思想是双频干涉SAR会形成两个不同的模糊高度,但同名点的高程仅有一个,利用中国余数定理[26]即可求出绝对相位。
模糊高度计算公式为
(15)
对于同一地面点,假设波长λ1和λ2两景解缠后的干涉相位对应的绝对模糊数分别为k1和k2,则k1和k2满足以下关系
Hunwrap1+k1·Hamb1=Hunwrap2+k2·Hamb2=Hscene
(16)
式中,Hunwrap i为频率i解缠后的干涉相位所对应的高程;Hamb i为频率i所对应的模糊高度;Hscene为地面点高程。
根据式(16),通过对k1和k2进行二维遍历搜索,选择(k1,k2)使Hunwrap1+k1·Hamb1和Hunwrap2+k2·Hamb2的差值在一定门限内,即可确定解缠后干涉相位的绝对模糊数。
原理上,首尾双频中只要有一个便可解算绝对模糊数,天绘二号采用首尾两个双频的设计,可以相互备份或校验。
图13为利用双频数据获取相位绝对模糊数生成的河北赤城精度检测场DSM数据,10个角反射器定位精度满足系统设计要求,说明天绘二号设计的首尾双频成像模式解干涉相位绝对模糊方法正确。
图13 赤城精度检测场DSM数据Fig.13 The DSM data of Chicheng calibration field
4 试验验证
4.1 仿真验证
为了验证关键技术可行性,在天绘二号卫星系统论证、研制过程中,安排了卫星编队技术仿真试验验证、SAR载荷协同工作的三同步地面试验验证、卫星系统样机集成和全系统半实物仿真验证,对卫星编队技术、SAR载荷协同工作、高精度基线测量、高精度基线定标及高保相成像等主要关键技术进行了验证。
在卫星编队技术仿真试验验证中,建设了基于气浮平台的编队飞行与控制试验系统,验证了不同工况下分布式卫星系统控制算法的可行性和有效性、编队构型控制指标的可行性、基于信息交互的安全控制功能等内容。其缺点是只能验证一个平面内的情况,由此,在后期型号研制时,采用了上海交通大学研制的12自由度半实物仿真试验系统(图14),对卫星编队构型设计、编队保持控制、编队构型重构、防碰撞进行全方位试验,验证了其解决途径的可行性。

图14 卫星编队12自由度半实物仿真试验系统Fig.14 Semi-physical simulation test system for satellite formation with twelve-dimensional
在SAR载荷协同工作的三同步地面试验验证中,专门研制了两套雷达系统,放在专用的轨道橇车上,如图15所示。在陕西省华阴市,利用3 km的轨道,以火箭发射为动力,两套雷达系统在铁轨上高速运动的同时,两天线相互间模拟卫星绕飞编队做相对运动,以卫星雷达工作的一发双收体制对华山进行成像,并处理生成DSM数据,处理结果如图16所示(因阴影、叠影等影响,DSM不连续),验证了解决方案的正确性和可行性。

图15 空间、时间和相位同步试验Fig.15 Space, time and phase synchronization test

图16 成像区DSMFig.16 DSM of imaging area
在卫星系统样机集成和全系统半实物仿真验证中,分别研制了两套GPS接收和SAR数据生成半实物模拟器,先后仿真了近100套带各种误差源及不带误差源的GPS、姿态观测等辅助数据、InSAR回波数据及远近波位定标数据,对高精度基线测量、高精度基线定标及高保相成像技术进行了验证,这也为天绘二号卫星形成编队后第1次开机获取InSAR数据。
高精度基线测量的关键是确保GNSS天线相位中心的稳定和高精度相对定轨。GNSS天线相位中心在暗室进行了标定和稳定性测量,在1 227.6、1 268.52、1 561.098、1 575.42 Mhz 4个GPS工作频点的稳定度为1 mm左右,满足设计要求;相对定轨采用西安测绘研究所和国防科技大学处理软件进行独立计算,两者采用不同的动力学策略和处理方案,从而保证了各自相对定轨结果的独立性,两者通过对GPS仿真数据的相对定轨结果比较表明,其相对定轨精度可以达到1.3 mm左右,满足设计要求。高精度基线定标利用仿真数据进行了试验,定标结果标准差为1 mm左右,满足设计要求,验证了高精度基线定标技术解决途径的正确性。高保相成像采用仿真数据分别进行了单基和双基成像,并对24个控制点进行了相位误差统计,结果为单基成像绝对相位误差均值为1.22°,相对相位误差为1.74°;双基成像绝对相位误差均值为0.60°,相对相位精度为0.24°, 相位精度有显著提升,表明采用双基成像可以很好地确保相位精度,验证了高保相成像技术解决途径的正确性。
4.2 在轨测试验证
天绘二号卫星在2019年5月20日—2020年1月12日进行了在轨测试试验。其中,2019年5月20日—2019年6月30日,为单星测试阶段,双星采用跟飞编队构型,对单星SAR性能指标进行测试;2019年7月1日—2019年7月8日,建立绕飞编队构型;2019年7月9日—2020年1月12日,为双星及地面系统测试阶段,对卫星编队及InSAR性能指标进行测试。2019年7月9日编队卫星干涉模式首次开机,当天晚上数据传回地面系统,用自研的数据处理系统,一次就成功生产出DSM数据产品。在双星绕飞编队测高模式下,共完成了5大项46小项测试试验项目,其中实装测试指标73个,测试结果表明主要性能指标达到设计要求,其定位精度与德国TanDEM-X系统[5]相当,满足1∶5万比例尺测图精度要求,优于设计指标。图17为2019年7月9日天绘二号首次开机获取的成果与SRTM获取的相同区域成果,图17(a)为天绘二号获取数据的干涉条纹图,图17(b)为天绘二号获取DSM数据,图17(c)为SRTM获取的DSM数据;由图17(b)和图17(c)可知,天绘二号获取的DSM数据描述的地形细节程度明显优于SRTM成果。图18为天绘二号与机载LiDAR获取的新疆定标场成果,图18(a)为天绘二号获取数据的相干系数图,统计的相干系数为0.89,图18(b)为天绘二号获取DSM数据,图18(c)为机载LIDAR获取的DSM数据,其精度为0.5 m;由图18(b)和图18(c)可知,天绘二号获取的DSM数据精度能满足要求。
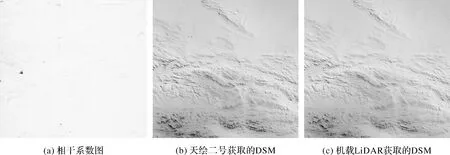
图18 天绘二号与机载LiDAR成果Fig.18 The DSM products of TH-2 and airborne LiDAR
天绘二号卫星在轨测试的顺利完成并转入运行,充分验证了关键技术解决途径的可行性和方法的正确性。
5 结束语
天绘二号卫星是我国第1个微波测绘卫星系统,也是我国第1个近距离绕飞编队卫星系统,从卫星编队到地面数据处理几乎都是全新的技术,关键技术多,除成熟的单SAR卫星关键技术外,还有卫星编队、SAR载荷协同工作、高精度内定标、基线确定、高精度基线测量、高精度基线定标、高保相成像及双频解算干涉相位绝对模糊数等关键技术,技术难度大。本文全面阐述了天绘二号卫星关键技术的解决途径,在研期间,利用仿真数据和半实物仿真试验验证了主要关键技术解决途径的可行性。
天绘二号卫星于2020年1月完成在轨测试并通过验收。在轨测试结果表明,系统运行状态良好,主要性能指标优于设计指标,其定位精度与德国TanDEM-X系统相当,可用于1∶5万比例尺地理空间信息产品生产,由此进一步验证了关键技术解决途径的可行性和方法的正确性。
