无人机倾斜摄影测量技术在桥梁检测中的应用
2023-01-15裴俊华谢爱萍罗广元刘维珩
裴俊华,谢爱萍,2,罗广元,刘维珩
(1.甘肃林业职业技术学院,甘肃 天水 741020;2.甘肃农业大学园林工程学院,兰州 730070;3.甘肃建投土木工程建设集团有限责任公司,兰州 730070)
1 引言
在传统的桥隧检测过程中,检测人员一般要深入桥隧实地进行勘察,通常配有桥检车和望远镜对桥隧病害程度进行检测,但这种检测方法工作效率低,时效性差,检测人员的安全性难以保证,检测时会造成交通堵塞和运营秩序混乱,难以适应桥隧检测需求。随着无人机摄影测量技术的日趋成熟,通过近景摄影获得被检测桥梁高分辨率的图像,对影像进行特征分析,得出桥梁病害结论的方法能有效提高桥隧检测的工作效率[1]。本文应用多视角倾斜摄影测量技术,获得高精度桥梁结构表面数据,结合二次桥底补测数据,进行三维建模和精细修模,获得高清晰度、无死角、可定位、可量测的高精度桥梁模型,在模型上完成对桥梁各项病害指标的量测,经试验对比,其成果具有一定的可靠性。
2 材料与方法
2.1 试验桥梁基本情况
试验桥梁为渭河1号大桥,桥址位于天水市麦积区,是城区南北跨渭河主通道。桥面宽12 m+2×2 m,桥梁全长378.47 m,15~25 m后张法预应力混凝土简支箱形梁桥,全桥共有75片箱梁,每片重55 t,荷载汽-20级,挂-100,流量6 824 m3/s,洪水频率1/100。桥墩为单排3柱式直径120 cm钻孔灌注桩基础。桥梁1985年9月建成通车,建设年代久,负荷量大,存在病害较多,是麦积区重点监测桥梁。
2.2 试验基本设备
试验采用无人机可上下搭载轻型多镜头倾斜摄影平台,平台搭载有垂直、前视、左视、右视、后视共5个相机,可同步获取5个方向的航空影像,相机总像素:18 000万像素;最短曝光间隔:2 s;平台工作时间:180 min;平台总重:25 kg;姿态调整:<0.5°;两自由度陀螺稳定;减震方式:两级减震;镜头焦距:35/50 mm;影像分辨率:约2 cm(50 m时)。二次桥梁底面补测采用DJI精灵4RTK,内业软件用Context Capture(以下简称“CC”)进行空三处理和三维重建,最后用DP-Modeler软件(以下简称“DP-M”)进行单体化精确修模。
2.3 试验方法
2.3.1 技术路线
为保障飞行安全,收集测区环境条件数据,控制点和地形地貌等测量资料,先按照倾斜摄影的方法进行第一次拍摄,内业解算形成粗模,在此基础上,二次进行航线设计和多视角拍摄设计,再次解算,通过修模形成高精度模型,然后在模型上进行巡检,量测桥梁各构件的病害定量指标。技术路线如图1所示。

图1 技术路线图
2.3.2 外业方法
第一次航拍按照普通倾斜摄影测量进行,通常在桥面上布设不少于10个像控点,像控点标志明确醒目,这些点同时可作为图根点和检查点,利用GPS-RTK图根点测量方法完成,控制点精度在2 cm以内。根据测区踏勘的情况,选择地面分辨率优于1 cm计算,航高为50 m,航向重叠度为80%,旁向重叠度为80%,预计飞行时间为10 min。第二次采用DJI精灵4RTK航拍,将镜头调整为最大仰角,在初次建模的基础上,按设计航线对桥梁底部进行倾斜摄影测量,为保障飞行安全和无死角拍摄,一般配合手动操控,并往返飞行[2],用激光全站仪对桥底的标志性特征点进行测量,作为桥底的像控点,用于建模和修模。
2.3.3 内业数据处理
根据GPS后处理软件进行差分解算,得到5个相机的精确曝光定位及天线相位中心POS信息。然后进行倾斜数据预处理,获取影像准确POS信息及相机信息。应用CC软件解算,导入影像和POS,选特征提取与匹配、控制点进行空三计算,检查精度,导出CC的XML文件,生成三维模型。通过DP-M软件进行精确修模[3],将CC建成的三维模型格式转换为OSG,设置基准面,构建单体化模型,对存在问题的部分进行编辑,纹理映射[4],完成高清晰度全视角桥梁模型。三维重建需要高性能计算机,完成后,须检查三维模型效果及精度。
2.3.4 桥梁病害指标量测
根据JTG/T H21—2011《公路桥梁技术状况评定标准》,对桥梁病害评定主要包括桥面系、上部结构、桥梁构件、部件、下部结构和全桥评定[5]。本文主要试验研究桥梁上部结构、桥梁构件和部件表面病害指标的量测精度,以验证方法的可行性。应用桥隧检测系统软件,将模型导入软件,进行裸眼巡视,发现病害处,手动添加裂缝、渗水、脱落等病害类型,测量病害的面积、长度和宽度等指标信息,如图2所示。最后统计汇总,形成报告。

图2 病害数据采集与查询界面
3 结果与分析
3.1 误差分析
3.1.1 外业飞行引起的误差及处理
倾斜摄影测量无人机受设备精度、地理条件、方案设计等因素影响,造成航片分辨率低,POS数据质量差,影响后续影像空三精度,进而影响建模精度和成图精度。为了克服以上问题,采用RTK/PPK融合作业模式和逐相机打标的方式,保障照片、基站数据、机载POS和机载GPS数据实现高质量采集。
3.1.2 空三加密引起的误差及处理
倾斜摄影测量后期数据处理时,影像分辨率和摄影比例差异、POS数据质量、遮挡物等因素导致粗差大,影响空三精度。为了提高精度,在外业建立像控点,将控制数据和RTK/PPK联合空三计算,通过人工干预将空三成果精度优化到最佳。最后,两次飞行数据模型应用DP-M软件进行精确修模,形成高精度桥梁模型。
3.1.3 模型量测产生的误差及处理
用检测软件量测也会产生误差,模型影像1个像素的误差,实地距离约1~3 mm,即使软件能够自动按照不同的面控制画线,但视差造成矢量的不准确仍然存在,需要提高操作人员采集的熟练程度,提高矢量采集成果精度。
3.2 精度分析
3.2.1 空三精度分析
检查倾斜摄影测量的空三精度[6],对比控制点和特征点,见表1。精度满足要求。
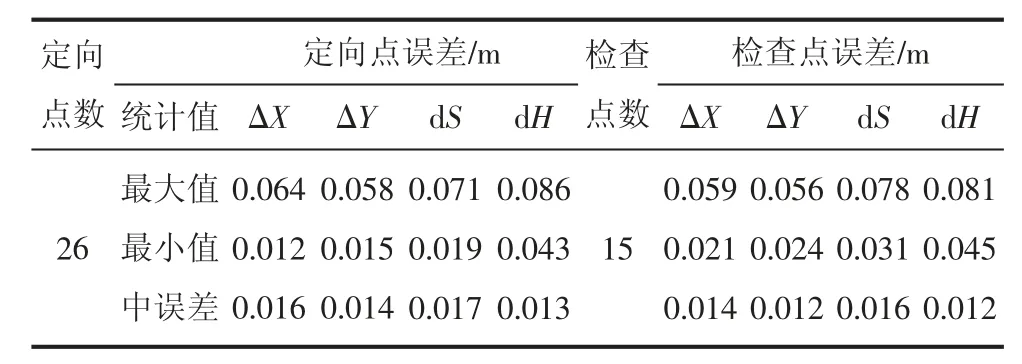
表1 空三加密精度统计表
3.2.2 病害量测精度分析
在桥隧检测软件中调入桥梁模型,通过缩放、拖动等工具,手动搜寻病害位置,按照病害类型在模型上调查量测,获取调查数据,对桥梁病害进行统计分析。对实地调查数据和模型调查数据比较,误差统计满足调查要求,见表2,无人机多视角倾斜摄影测量技术具有明显优势。

表2 实地检测数和软件模型检测数统计表
裂缝对桥梁的危害十分严重,当裂缝宽度大于0.2 mm时就存在安全隐患,需采取维护措施,桥梁裂缝测量的精度要小于0.1 mm[7]。对模型裂缝宽长度量测与实地检测数据比较,长度误差范围在-0.02~0.02 m,宽度误差范围在-0.01~0.15 mm,见表3。模型裂缝宽度数据存在偏大的趋势。
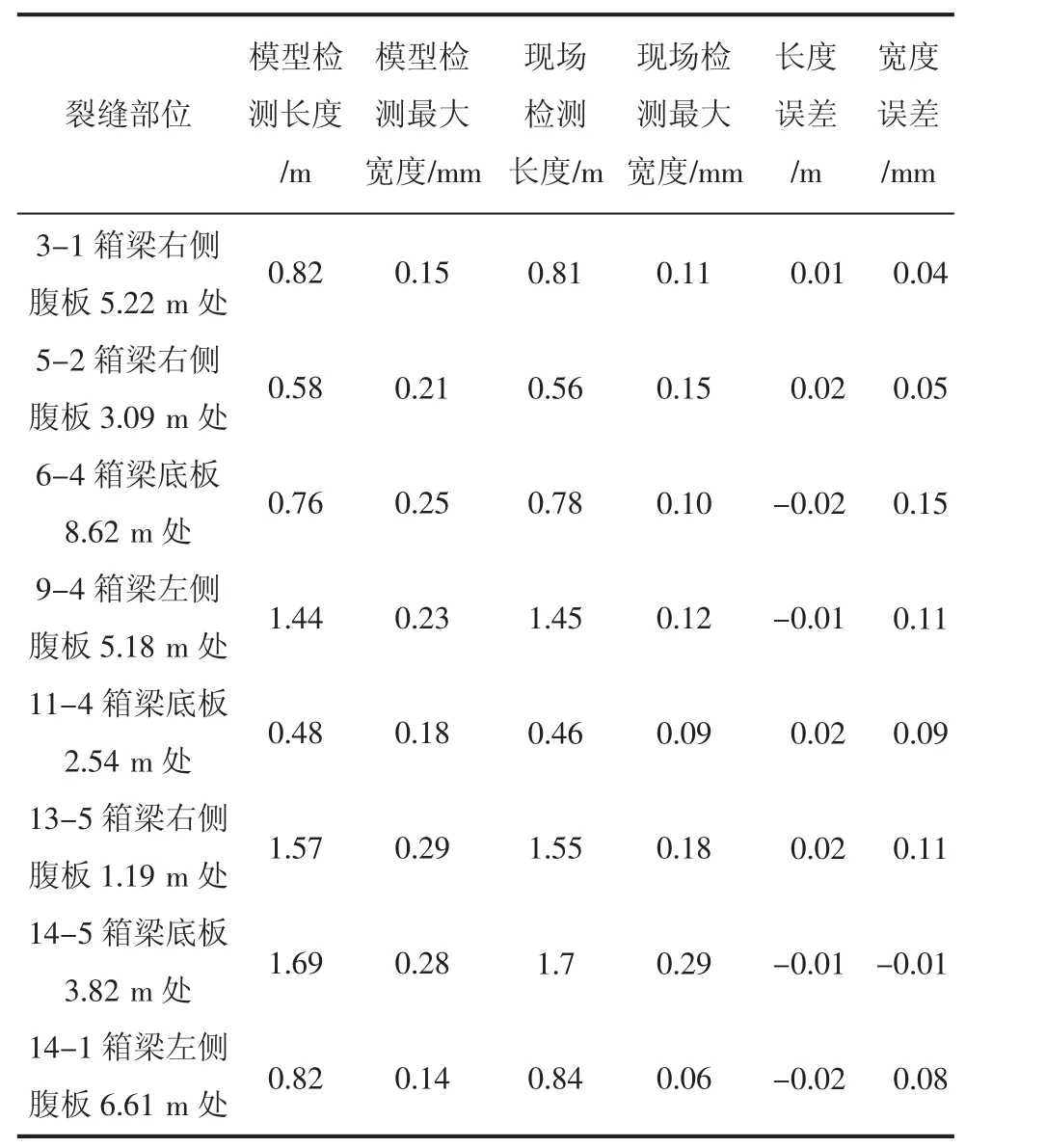
表3 实地检测和软件模型检测裂缝长度宽度对比表
通过实地检测和软件模型检测量算面积对比,见表4。面积误差范围在-0.03~0.03 m2,满足病害检测精度要求。
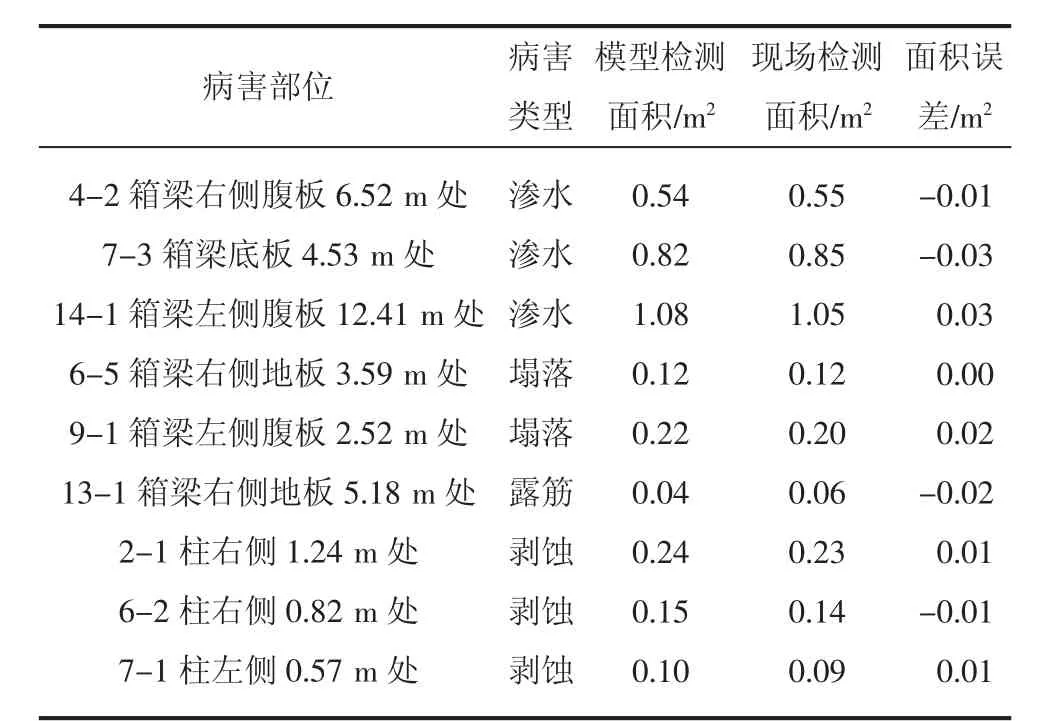
表4 实地检测数和软件模型检测面积量测对比表
4 讨论
无人机倾斜摄影测量技术可完成复杂建筑物三维建模工作,但二次拍摄桥梁底面卫星信号弱,无人机摄影有难度,规划高度和航线需要在第一次模型基础上精准完成。航测时外业飞行采用RTK/PPK融合作业模式和逐相片打标方式,提高定位精度。内业通过空三解算、建模、修模完善建模质量,当桥梁底面构造复杂时,还需要处理冗余影像,补拍照片贴图,完善模型[8],这就加大了建模难度,使得建模工作量变大。模型的质量决定着桥梁病害检测成果的准确程度,所以建模修模是核心工作。当模型精度能够达到桥梁检测技术的要求时,存在的个别误差较大病害点,是人为确定区域主观画线而导致面积不准确。
混凝土梁式桥在道路桥梁类型中占比较大,其病害检测是一项复杂的工作,无人机多视角倾斜摄影测量技术只是对桥梁表面病害进行检测,存在局限性,如裂缝的深度,混凝土强度等无法检测[9]。对于全桥的安全风险评估,需要考虑更多的要素。建议用无人机多视角倾斜摄影测量技术进行初步评价,以确定进一步检测的必要性和重点检测的病害。其模型数据可作为桥梁周期性监测的对比数据。
5 结论
通过无人机多视角倾斜摄影测量技术对天水市麦积区渭河大桥病害进行检测,共发现裂缝12处,渗水3处,塌落2处,露筋1处,剥蚀3处。模型量测宽度、长度、面积等数据和实地量测数据差异不大,在误差许可范围内,满足病害检测要求。应用无人机多视角倾斜摄影测量技术完成一项桥梁检测工程,测量外业工作强度小,需要的人力少,仪器轻便,人员安全,能够有效缩短项目周期。随着人工智能图形识别技术能力和精度的大幅提升,该方法能快速提升工作效率,有效保障作业人员安全,具有一定的推广意义。
