MEMS激光雷达的光学扩角系统设计
2023-01-12储政勇瞿启云刘小楠雷英俊李瑞君
葛 鹏, 储政勇, 瞿启云, 刘小楠, 许 磊, 雷英俊, 李瑞君
(1. 合肥公共安全技术研究院,安徽 合肥 230031; 2. 中国电子科技集团公司第三十八研究所,安徽 合肥 230031;3. 合肥工业大学,安徽 合肥 230009)
0 引 言
在自动驾驶技术领域,其核心硬件系统是环境感知传感器,目前常见的车用环境感知传感器包括毫米波雷达、超声波雷达和高清像机等[1-2]。毫米波雷达的测距精度较低,超声波雷达仅适用于近距离障碍物感知,而高清像机则易受气象环境因素的影响。因此,仅使用这些传统的传感器难以满足L3级自动驾驶系统的需求[3],而激光雷达输出激光的波长较短,具有较高测距分辨力,且得益于激光的高方向性和高相干性,可以实现远距离抗干扰测距,是自动驾驶技术解决方案的核心器件。
根据激光扫描方式的不同,可以将现有激光雷达分为机械式、混合固态式两类。机械式车载激光雷达是指通过机械旋转实现激光扫描的车载激光雷达。美国Velodyne公司是著名的机械式车载激光雷达供应商,其代表性产品是64线激光雷达HDL-64E,该产品发射系统与接收系统均随着机械轴转动,探测性能优异[4]。机械式激光雷达的成本较高,且长期可靠性较差,难以实现车规级量产。
为降低车载激光雷达的生产成本,增加其结构的稳定性,同时保证较好的探测性能,混合固态式车载激光雷达应运而生。混合固态式车载激光雷达的扫描方式主要有三种:棱镜、转镜、微机电系统(micro-electro-mechanical system, MEMS)振 镜[5]。棱镜扫描是将两个有斜面的柱状镜头的组合,可以利用光的折射控制激光的扫描方向,最终扫描出一个花瓣状的区域,调整两个棱镜转速可以控制扫描的区域。棱镜激光雷达扫描中央区域点云密集,而边缘会相对稀疏,并且控制棱镜转动也是个难度较高的工艺,目前真正实现量产的仅大疆览沃。转镜扫描是将激光收发模组固定,在前方布置两面镜子,通过转动镜子将激光反射出去,实现了扫描的效果,但是只能扫描前方一定的角度。混合固态式激光雷达使用MEMS振镜实现激光扫描。MEMS技术将机械结构进行微型化、电子化设计,通过大批量生产以降低成本,是目前最有希望的车规级激光雷达的技术路线[6]。MEMS车载激光雷达的不足之处在于MEMS振镜扫描角度较小。国外的研究人员使用了三个激光二极管,在MEMS振镜前构造了一个线性阵列,将激光雷达的目标空间水平方向上的视场角延长了3倍[7-8]。国内的速腾聚创和华为等公司也通过增加激光收发组件的方法提高了混合固态式激光雷达视场角,使其生产的混合固态式激光雷达的水平向视场角达到120°[9-10]。但是使用多个激光收发组件会增加激光雷达控制程序和结构设计的难度,增加成本。相对于使用多个激光收发组件,由正负透镜组组成的光学扩角系统可以在不增加激光收发组件的条件下提高激光雷达的视场角[11-13]。
本文基于二维MEMS振镜的特性,设计了一个用于混合固态式激光雷达的光学扩角系统。该系统包括一个正聚焦透镜,一个f-θ镜组和一片广角发散负透镜,通过对该系统进行仿真分析和参数优化,可以将混合固态式激光雷达的视场角由±15°扩展到±24.25°,并使雷达射出的激光束在100 m处的光斑小于 10 cm。
1 原 理
如图1所示,通过一个负透镜放大MEMS振镜的扫描角度,但是这样射出的激光束不能均匀分布。
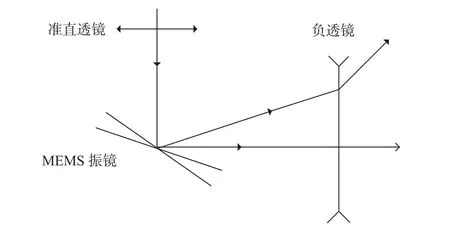
图1 基于负透镜的光学扩角系统
激光扫描系统中,根据扫描器(振镜)和聚焦透镜的位置不同,可分为透镜前扫描和透镜后扫描,如图2所示。透镜后扫描就是振镜位于聚焦透镜之后,如图2(a)所示。该方案只需校正球差,透镜设计较简单。但由于像面是圆弧面,故一般不采用这种方案。图2(b)为透镜前扫描系统示意图,振镜位于聚焦透镜的前面。透镜的孔径取决于入射激光束在其上的光线高,属于大视场小孔径光学系统。f-θ透镜采用透镜前扫描方案[14]。
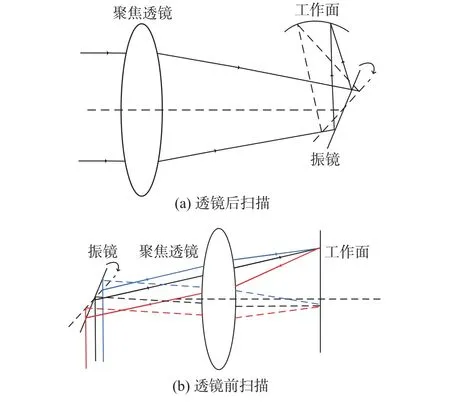
图2 两种扫描方式
f-θ镜组是解决光学扩角系统光束非均匀分布的一种可行方法,均匀扫描的光学扩角系统如图3所示,准直的激光束通过正透镜组投射到MEMS振镜上,由于MEMS振镜的机械偏转,反射光束通过f-θ镜组,然后平行或近似平行地投射到负透镜上进行角度放大。均匀扫描的光学扩角系统为保证主光线平行于光轴,其f-θ镜组设计为像方远心,这样有利于负透镜的扫描角度延伸。负透镜上的像高h与光束入射角θi之间的关系为:
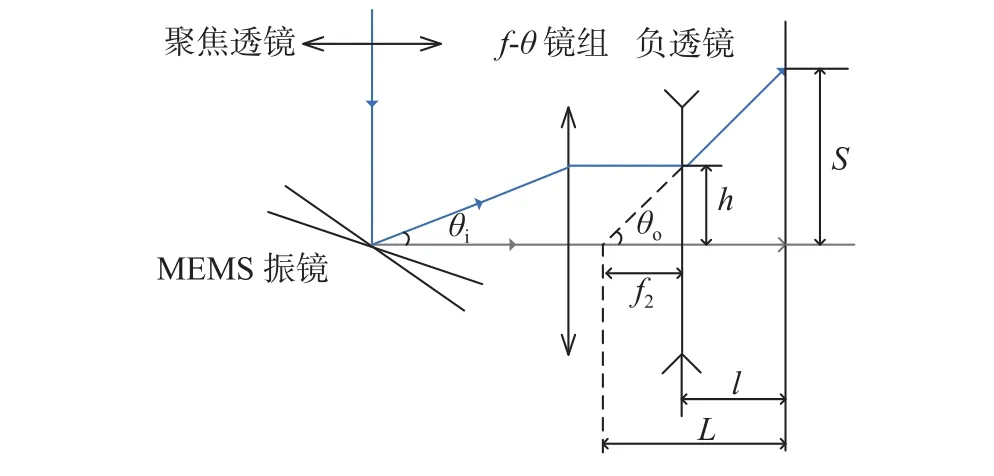
图3 基于f-θ镜组与负透镜的光学扩角系统

其中f1为f-θ镜组的焦距。
光束从负透镜出射的角度为θo,入射角θi和出射角θo的关系为:

其中f2为负透镜的焦距。由式(2)可知,当f-θ镜组的焦距f1大于负透镜的焦距f2时,就可以实现扫描角度的放大。出射光束在目标空间平面上的最大扫描范围S可表达为:

其中l为目标空间平面到负透镜的距离。令L=l+f2为目标空间有效距离,则:

式(4)是一个线性扫描方程,表明扫描光束在垂直于光轴的目标空间平面上的扫描范围与MEMS振镜的扫描角度成正比。当MEMS振镜的扫描角度均匀变化时,目标空间平面上光斑大小分布均匀,即通过f-θ镜组与负透镜组合的光学扩角系统可以均匀扫描。
2 理想光学扩角系统设计
MEMS激光雷达采用波长为905 nm的脉冲激光器作为光源,其核心部件是一个光学转角可调的二维MEMS振镜,该MEMS振镜由苏州希景微机电科技有限公司[15]提供,两轴的光学扫描角度分别为±15°和±12.5°。由图 3 可知,整体的光学扩角系统主要采用三组镜组完成扩散系统的结构设计,分别是一组放置在MEMS振镜前的聚焦正透镜组,一组放置在MEMS振镜后端的f-θ镜组以及在f-θ镜组后的单片式扩散负透镜。聚焦正透镜一方面对角度放大时产生的光束发散进行了补偿,一方面使得准直后的激光束可以全部打在振镜上,提高MEMS振镜的扫描效率以及激光能量的利用率。设计使用ZEMAX光学设计软件的序列模式对光学扩角系统进行仿真,该软件包含光学设计、优化以及成像分析的功能,满足设计要求。
根据系统的激光器波长以选取相应的准直镜,经调整光斑直径约为2.4~2.8 mm,在ZEMAX编辑器中设置入瞳大小为2.5 mm;因系统光线折转位置在振镜处,将入射光束的视场角设置为0°。根据设计要求,采用焦距为200 mm的聚焦正透镜作为MEMES振镜前的光束会聚镜组。平场聚集透镜及广角发散透镜放置于MEMS振镜后端,因振镜为平面反射光学结构,故不改变系统整体焦距。f-θ镜组与聚焦镜组共同组合为光焦度为正的光学结构,再通过最后的一片发散透镜使得会聚光束近平行出射。为了便于后续光路对光成像的调整,f-θ镜组为远心光路,由光束扩散公式可得,平场聚焦透镜焦距需要优化至小于前置的聚焦正透镜。设平场聚焦透镜组焦距为185 mm,利用理想透镜,初步测试确定出三组可行的镜组焦距以及粗略镜组主点位置。理想镜组的光路仿真结果如图4所示,理想光学系统各镜组焦距参数见表1。
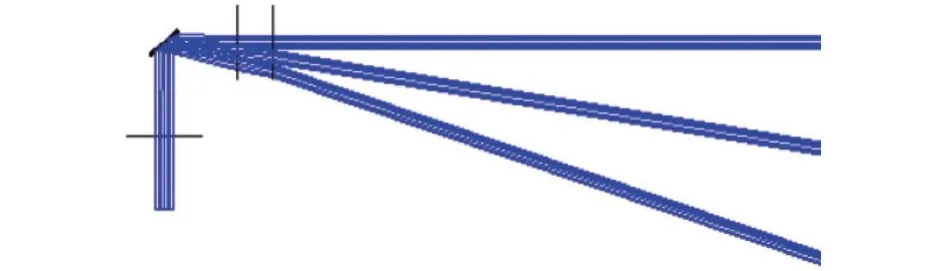
图4 理想光学系统示意图

表1 理想光学系统各镜组焦距参数
3 光学扩角系统光机参数设计
3.1 准直系统设计
脉冲半导体二极管发光面为矩形,远场的光斑成椭圆形分布,如图5所示。以武汉高跃光学生产的TO905070C型脉冲半导体二极管为例,其发光面尺寸为 200 mm×10 mm,激光器快轴发散角达到25°,慢轴发散角达到9°。半导体二极管光束准直有诸多方法,如单透镜法,倒置望远镜的组合式透镜法和柱面镜法等。以上的激光准直方法设计目标都只关注于缩小发散角,将半导体二极管的发散角降至毫弧度量级甚至更小,而并不考虑准直后的激光光束光斑大小。而混合固态激光雷达的设计中使用了MEMS振镜,以实现准直的激光光束二维扫描,因此在设计中需要考虑准直后的激光光斑大小。
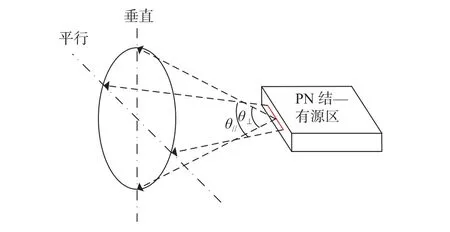
图5 半导体激光器发光示意图
MEMS振镜的镜面大小为5 mm,考虑到扫描时镜面的扫描有偏转以及准直后的入射光方向,光斑半径需要低于3.5 mm。根据高斯光束在空中的传输理论,发散角与束腰半径成反比例关系。想要达到光斑直径和发散角都处在一定的范围之内,需要考虑其他的方法,本次设计采用了将半导体二极管出光耦合进光纤,然后再用光纤准直器对出射光束准直的方案。 常见的光纤数值孔径NA为0.16、0.22、0.27和0.37,对应的最大入射孔径角分别为12°、25.4°、31.3°和 42°,考虑到激光器与光纤的耦合效率,本次设计选取NA = 0.22的光纤。通常可使用光纤准直器对经过光纤传输的脉冲激光束进行准直,其内部为小型非球面平凸透镜。光纤的输出光束具有高斯强度分布,所以可以通过下面的近似公式来进行理论计算。其中MFD为模场直径,f为光纤准直器焦距,得半发散角的近似公式。

从式(5)中可以看到经过准直后的发散角与光纤准直器焦距成反比。上文中可以得到激光雷达的角分辨率需要小于0.49°,准直系统的焦距可以根据几何光学的原理,得到式 (6)。

经过光学仿真设计,选取准直系统的焦距为11 mm,工作波长范围从 650 nm 到 1 050 nm。通过调整镜面截距,代入式 (7)可得光斑的水平和竖直发 散 角 半 角 约 为 0.22° ~ 0.45°, 光 斑 直 径 约 为2.4~2.8 mm。ZEMAX仿真结果如图6所示。
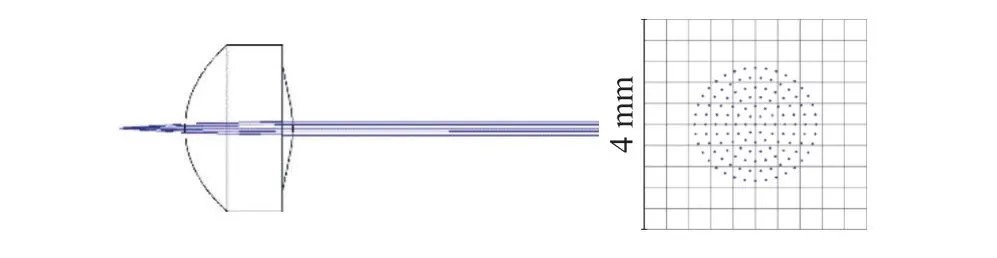
图6 激光准直仿真及结果
3.2 聚焦透镜组设计
因为MEMS镜面较小,为保证入射的激光束全部打在振镜上,提高振镜扫描效率以及激光能量利用率,需要在振镜前端放置一个用于聚焦的正透镜组,将激光在MEMS镜面的光斑半径做一定的缩小。根据设计的预计参数,聚焦透镜焦距设置为200 mm,在光学仿真软件里选择入瞳口径为2.5 mm,根据透镜的焦距设置F#为80 mm。通过查询相关的光学设计手册,设置两个镜片的材质为F_silica以及SF18。通过对光学评价函数的设置完成镜组的优化。透镜组的参数及具体优化结果见图7。
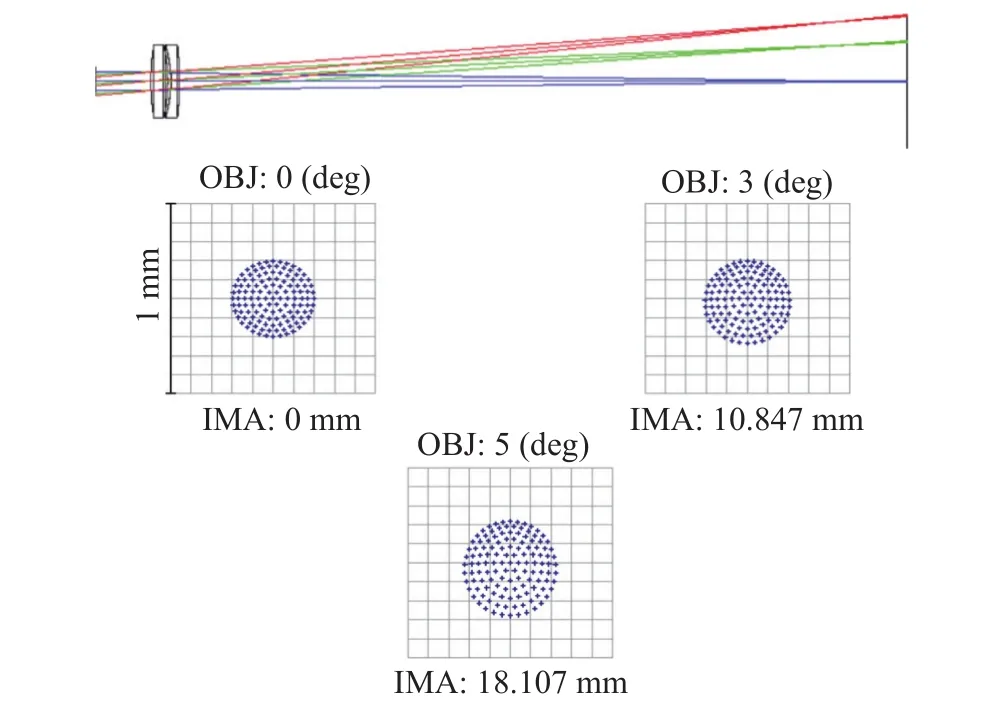
图7 聚焦透镜组仿真光路图及成像质量图
3.3 f-θ 镜组设计
平场聚焦镜组广泛地运用在扫描系统当中,它具有像高与扫描角度成线性关系的特性。f-θ镜组由三个透镜组成,有效焦距为185 mm,光焦度分别为负、正、正。通过查询设计手册,负透镜与正透镜的材质为F_silica以及SF18,对该透镜组优化时,在光学评价函数里运用DISC函数对镜片做优化。如图8所示,优化后观察赛德尔系数,对产生畸变的几个面做非球面的处理使得成像效果更好,畸变度在0.02%以内。
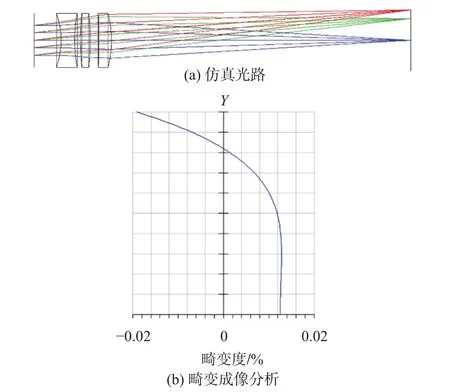
图8 f-θ镜组仿真光路图及畸变成像分析
3.4 扩散镜组设计
扩散镜组的焦距由最初搭建的理想光学系统取最优值得出,由于理想光学系统为理想薄透镜,所设置位置为镜组的主点位置。实际光学系统中,镜片组具有一定的厚度,在已优化的镜组主点位置靠前的前提下,凹透镜采用单片镜片并且用非球面的方法进行设计。设置焦距为-75 mm,对镜片的第一面设置为非球面,优化结果如图9所示。
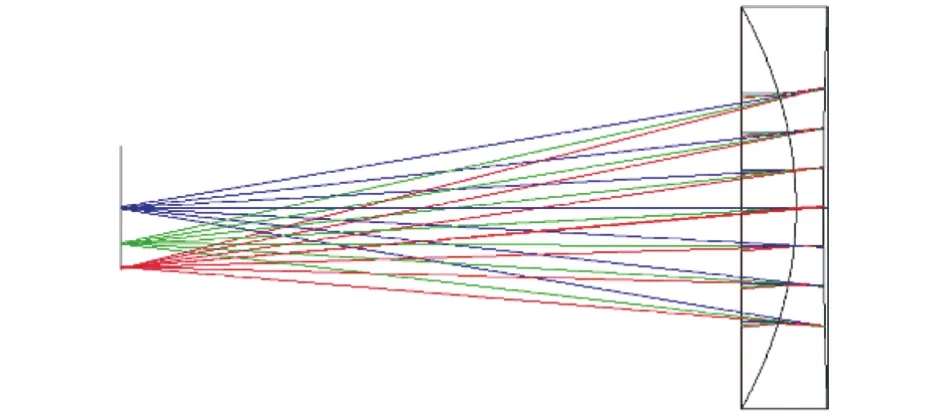
图9 扩散透镜组仿真光路图
3.5 光路的组合优化
所有的镜片优化之后,通过预先计算设计的各镜组距离把镜组进行组合。用光学仿真软件仿真MEMS镜组时,在正聚焦透镜之后的25 mm处添加镜面,使镜面后端的光路发生90°的反射偏转。随后在镜面位置添加一个7.5°的倾斜偏转,使得后置光路偏转。在设计扫描系统时,需要用到ZEMAX的多重组态功能,将镜面的倾斜角度设置为多重结构。因为光学系统的固有特性,处在边缘的光斑较为中间的光斑有很大的扩散,这对于激光雷达的结构显然是有缺陷的,于是用多重组态设置MEMS振镜的单方向五个角度,分别为0,1/4,1/2,3/4和1五个偏转角度。通过多重组态加权优化计算以及一定的手动测试调整,使得光斑在成像面的尺寸达到平均最小化,镜片设计数据见表2(由于ZEMAX仿真软件中设置镜片参数时以面为基准,表中玻璃材质标注为“-”的面,其与前一个面共同组成一个镜片)。
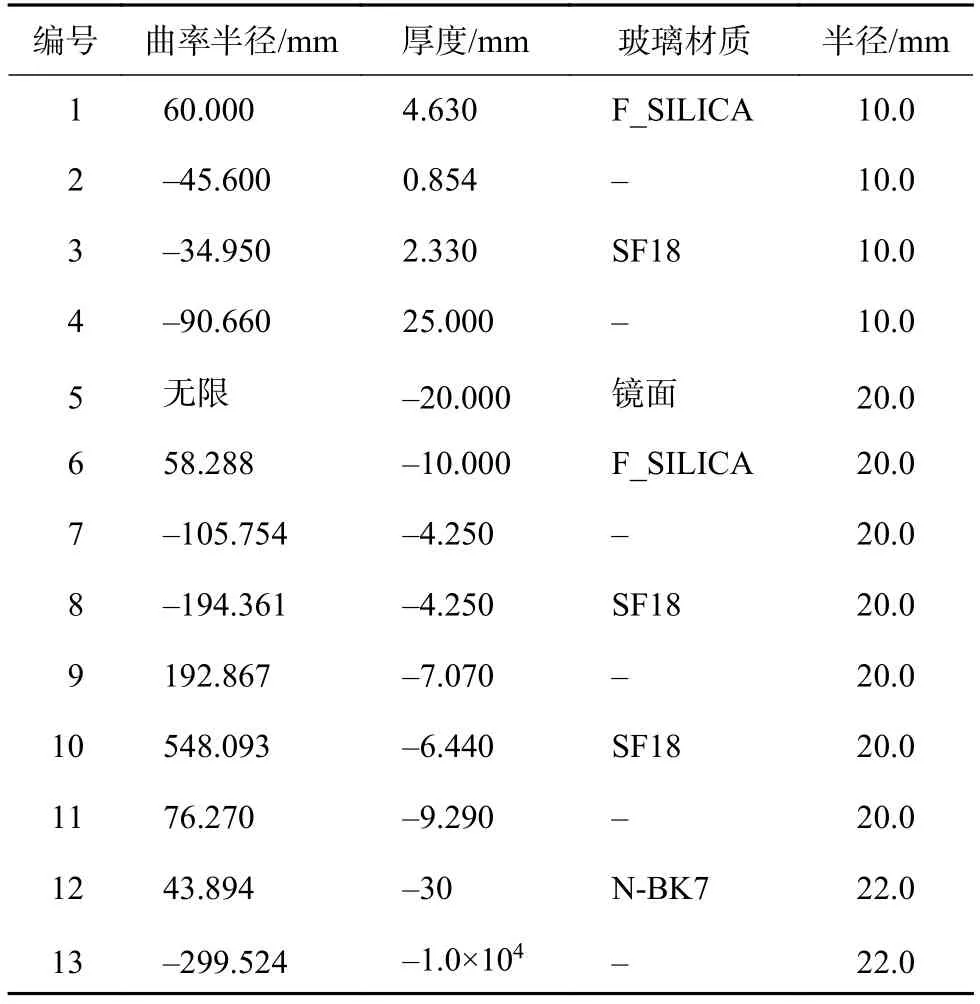
表2 发射光学系统设计参数
4 设计结果评价与光学元件公差分析
4.1 结果评价
根据式(2)~(4)计算可以得到,当各镜组参数与理想镜片组参数一致时,光学扩角系统的理想扫描角可以达到θout=54.5°。但在实际设计过程中,考虑到以下两点:一是理想光学系统的仿真镜片为薄透镜,而实际设计的镜组具有一定的厚度,镜片安装时需要定位整体镜组的主点位置,此时镜片位置与理想位置有一定的偏差;二是MEMS振镜后的镜组视场角较大,因为镜片设计初始结构为球面镜,镜片边缘造成的光线像差很大,经过非球面处理后,虽像差有一定校正,但在远距离成像时还是有较大失真,于是需要用适当减小扫描角度的方法补偿远距离的成像质量。实际光学扩角系统光路如图10所示。
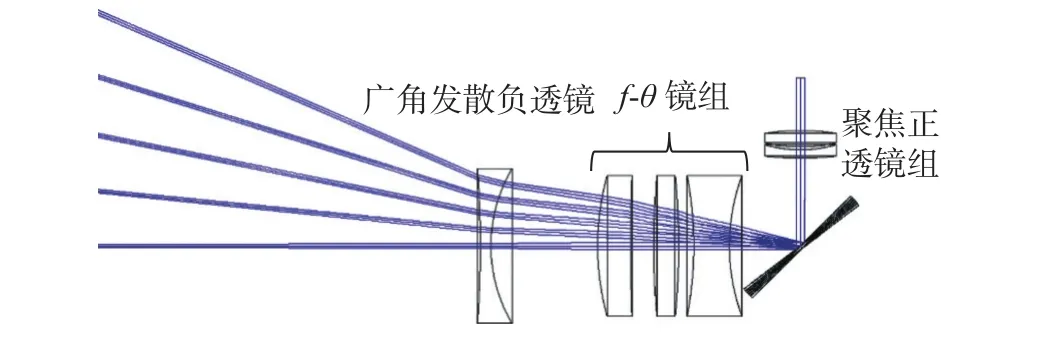
图10 光学视场角扩散仿真光路图
图11 所示为振镜机械偏转角度 7.5°,3.75°,0°时的成像光斑,在组合优化的5个角度中,最大光斑半径为108 mm,最小尺寸68 mm,在扫描轴上取其他扫描角度时,可以观察到光斑大小由中心0°向扫描边缘逐渐增加,具体仿真结果如表3所示。最大尺寸距指标要求尺寸有约8%的误差。同时测得发散角为±24.25°,视场角扩大倍数为1.6倍。
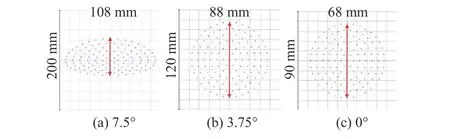
图11 各偏转角下的光斑图

表3 振镜偏转角与成像光斑直径的关系
该光学扩角系统结构简单,仅由6组透镜组成且制作难度较低。镜组结构的本质为倒置的望远镜结构,准直激光束在经过系统时完成了进一步的准直,再次提高了激光的方向性。扩散结构的核心是f-θ镜组与广角发散透镜,前置聚焦镜仅起到辅助光线会聚效果,在MEMS振镜通过控制缩小扫描角度时,激光成像效果会再次改善。
4.2 光学元件加工公差分析
加工误差对于光学系统的实际使用具有较大的影响,因此基于ZEMAX软件进行了加工公差范围的仿真,该仿真分为准直镜组、聚焦镜组、f-θ 镜组和扩散镜组四个部分,分别仿真了三种常用的光学元件加工公差范围(±100 µm、±50 µm、±10 µm)内极限误差下的镜组成像情况,仿真结果如表4所示。当镜片的加工精度达到±10 µm,即光学元件的曲率半径、中心厚度和直径的加工公差为±10 µm时,可接近本文中光学扩角系统的理想参数。因此,MEMS激光雷达的光学扩角系统参数的设计公差范围为±10 µm。
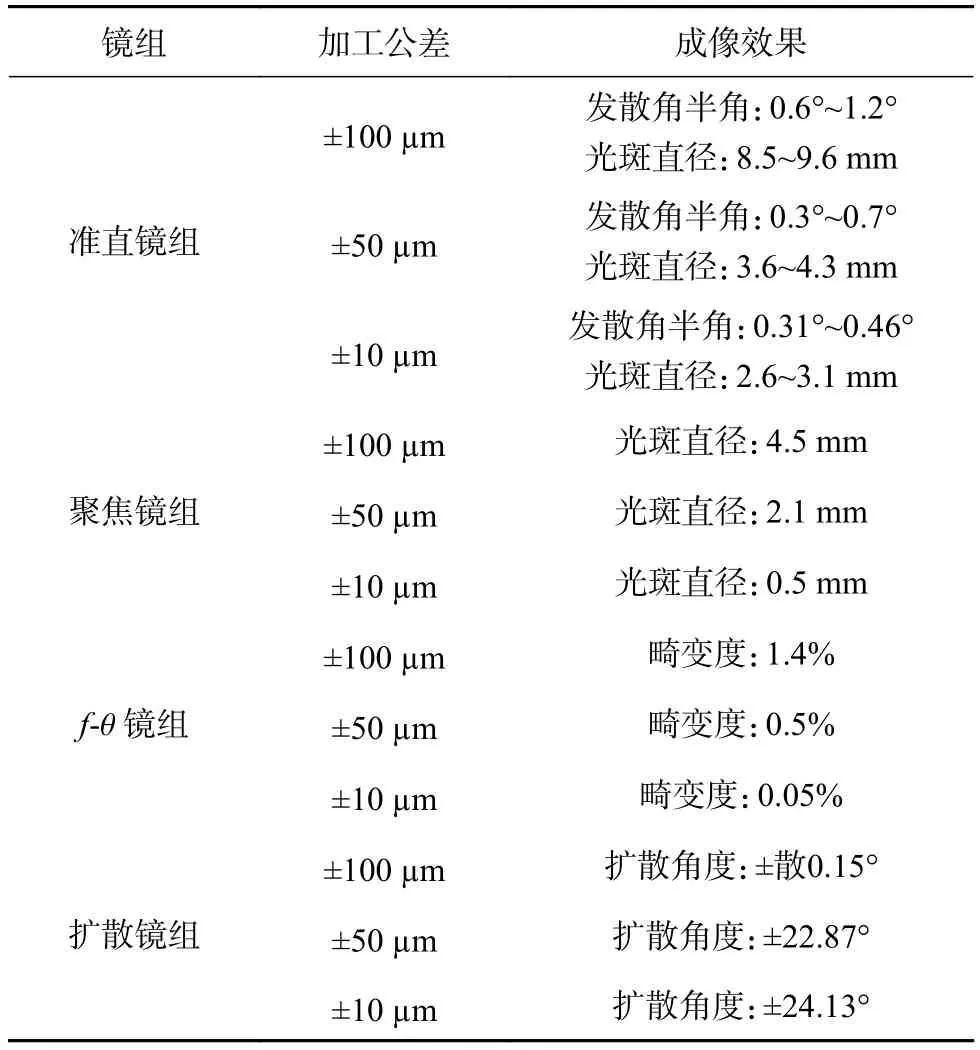
表4 光学元件加工精度仿真
5 结束语
以MEMS振镜为扫描系统的激光雷达存在机械扫描视场角有限的缺点,因此不适合应用于大视场角成像激光雷达。针对这种情况,本文提出了一种大视场角扫描的新方法,即在传统的MEMS的光学角度扩展系统中加入一个平场扫描透镜组和一个广角扩散透镜组。根据光学角度扩散的原理,给出了各镜组焦距参数与出射角的推导公式。角度扩展的完成取决于入射激光束在透镜表面的光斑大小、焦距和视场之间的关系。在已知初始光学扫描角的情况下,通过预计设计指标计算需要的镜片参数,并调整各镜片距离实现大扫描视场。利用光学设计软件ZEMAX,设计了一种基于MEMS振镜的折叠扫描光学系统。通过正聚焦透镜、f-θ镜组、广角发散透镜的组合使准直激光束完成大角度的扫描效果。在成像评价中,可以得到在MEMS振镜调整为最大扫描模式(±7.5°)时,系统发散角为±24.25°,视场角扩大倍数为1.6倍。因此,通过该系统的激光束可以在 48.5°×48.5°的有效视场范围内对 100 m 左右的目标进行均匀扫描,且光斑尺寸较小。f-透镜组是像方远心光路,扩角透镜组与f-透镜组之间距离的改变不会影响主光线的方向,系统装调方便。通过更换不同扫描角度的MEMS振镜,可将该光学扩角系统应用于其他MEMS激光雷达。该系统结构简单,制作方便,在混合固态激光雷达中具有重要的应用价值。后期将根据这些参数设计相应的夹持和装调机构,搭建基于该光学系统的广角激光雷达技术验证系统,测试该光学系统的性能,最终实现MEMS激光雷达光学扩角技术的实际应用,促进MEMS激光雷达相关技术进步。