一种空间飞行器多飞行剖面下的最优配重方案确定方法
2023-01-12杨自鹏刘宇哲
杨 勇,黄 蔚,张 群,杨自鹏,刘宇哲
(北京宇航系统工程研究所,北京,100076)
0 引 言
空间飞行器在执行宇航飞行任务时,飞行器质心位置偏差对于整个飞行任务中的制导、姿态以及分离都有着显著影响。因此必须通过配平的方法对空间飞行器质心偏差进行控制,以提升飞行任务的可靠性[1,2]。空间飞行器的配平的依据是其质量特性数据,通常在发射场阶段进行测量[3~7]。空间飞行器根据功能,可分为空间运输飞行器及返回式飞行器。
对于返回式飞行器而言,其质心控制的研究内容主要为:根据已知目标质心位置及有限个配重安装位置,通过优化算法计算得到最优的配重块安装位置及重量,使得在质心得到控制的同时,满足质量最小或其他优化目标[8]。
对于空间运输飞行器,如上面级,其质心控制的研究内容为:通过算法确定配重安装的最优位置及重量,使得飞行器在多个飞行剖面下均满足质心控制要求。
本文针对空间运输飞行器多飞行剖面状态下最优配重位置的确定进行研究,结合空间飞行器多飞行剖面质量特性数据,给出了一种通过递进扫描的方式确定空间飞行器多剖面最优配重位置及重量的方法,该方法能够快速有效的得到最优配重位置及重量。
1 传统作图配平方法的缺陷
空间运输飞行器常用配平方法为作图配平方法,其根据飞行器各飞行剖面的质量特性数据进行作图,从而确定可配平区。
以2个飞行剖面为例,通过质量特性数据计算可得到不同飞行剖面下的总偏心力矩iL,则该剖面的理想配重量所产生的偏心力矩为-iL,若容许偏差为δiL,则允许配重所产生的偏心力矩为-,其中mi为各剖面组合体质量,ρi为各剖面允许的偏心距离。以 i-L终点为圆心、iδ L为半径作图,可以得到图1。
从图1中可以看出,如果2个圆存在交集,则矢端在阴影部分的偏心矩可以同时使两个飞行剖面的质心满足设计要求。而阴影部分中任意偏心矩 (,)Lφ=L 所指向的位置即为可配平位置,其中φ为方位角。所需配重重量则为 m =|L|/r,其中r为配重安装半径。若2个圆不存在交集,则表明没有可配平区域。

图1 作图法配平 Fig.1 Counterweight Through the Drawing Method
通过该作图配平方法确定了可配平区域后,并不能直接得到最优配重位置,而是需要在可配平区域中选取几个点进行确认,从而得到近似的最优解。
同时对于具有多飞行剖面(不小于3个)的空间飞行器,其配平图绘制往往较为复杂,在可配平区域通过选点找到近似最优解也较为困难,因此作图配平法在解决空间飞行器多飞行剖面(不小于3个)配重优化问题上存在天然缺陷。
2 递进扫描法确定最优配平位置
为解决上述作图配平法存在的问题,实现空间飞行器多飞行剖面(不小于3个)配重位置优化,本文提出了一种递进扫描的方法。
递进扫描法的第1步是确定初始扫描范围。根据空间飞行器质量特性数据确定初始扫描范围为

式中 r为半径;θ为角度,逆时针为正。iX,iY为某一飞行剖面横向质心零偏差的理论配重位置;iδ L为该飞行剖面允许的质心偏差所引起的偏心力矩,且δLi=mi·ρi,其中 mi为该飞行剖面组合体质量,ρi为该飞行剖面允许的横向质心偏差。
对最大扫描区域0A沿r、θ方向进行n次划分,可得到 (n+1)2个目标点P0(rj,θj)。得到目标点后,根据优化目标f (P0),对目标点进行逐一判断,最终得到近似最优点P0。
通过得到近似最优点及其附近的点,可得到新的扫描区域:

继续对扫描区域1A沿r、θ方向进行n次划分,得到 (n+1)2个目标点P1(rj,θj),对新目标点进行逐一判断,得到新的近似最优点P1。
以此类推,每一次扫描可得到扫描区域Ak,近似最优点。判断新得到的近似最优点与上一次得到的近似最优点所对应的优化结果之差是否足够小:

如是则该点为最优点,即最优配重位置,如不是则继续扫描,达到最大扫描次数后仍未找到最优点,则中止扫描。递进扫描法流程如图2所示。

图2 递进扫描法流程 Fig.2 Flow Diagram of Progressive Scanning
3 仿真分析
3.1 递进扫描法仿真
本文通过某空间飞行器的实测质量特性数据,对上述递进扫描优化方法的有效性进行验证。飞行器各飞行剖面质量特性数据如表1所示。

表1 飞行剖面质量特性数据 Tab.1 Quality Characteristics of Flight Profiles
采用递进扫描法对表1所示质量特性数据进行计算,求解最优配重位置及配重质量。
选取扫描区域的划分次数为 6n=。将配重优化目函数定为:最优点位置需使所有飞行剖面的质心满足设计要求,且各飞行剖面的质心偏移量之和最小。即:
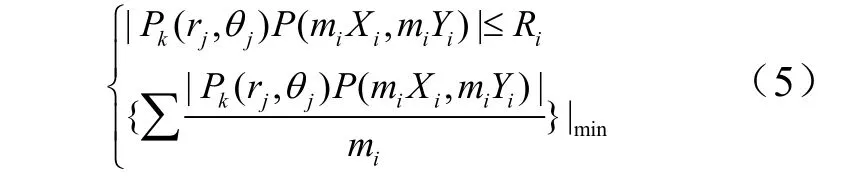
通过Matlab进行仿真,得到递进扫描法优化过程,如图3所示,并得到最优配平点坐标为(196.1436,2016.533)。

图3 优化过程 Fig.3 The Optimize Procedure
续图3
经递进扫描法优化后,飞行器各飞行剖面质心偏移量如表2所示。

表2 优化后的各剖面质量特性数据 Tab.2 The Optimal Quality Characteristics of Flight Profiles
从表2中可看出,经过优化配重后,飞行器所有飞行剖面质心偏差均满足设计要求,本文提出的递进扫描优化方法能够用来确定空间飞行器多飞行剖面下的最优配重方案。
3.2 划分次数对递进扫描法计算结果的影响
初始扫描区域的划分数量是一个较为重要的参数,对递进扫描法的计算精度及计算效率均有影响。本文对初始扫描区域的划分次数n进行不同取值(n=6,7,…,100),根据不同划分次数对表1的数据进行处理,可得到图5~8所示的计算结果。

图4 优化目标值随划分次数的变化情况 Fig.4 Changes of Optimize Target Value
由图5可知,随着划分次数的增加,优化目标值无明显变化,对不同扫描次数计算得到的优化目标值进行统计,可得目标值的样本均方差为 σ= 0.0025 mm ,可认为在使用递进扫描法进行计算时,得到的优化结果是稳定的、可信的,同时为节约计算时间,提高效率,不应选择过大的划分次数。
从图5、图6可知,随着划分次数的增加,扫描次数是下降的,但计算量迅速增大。

图5 扫描次数随划分次数的变化情况 Fig.5 Changes of the Number of Scans

图6 扫描点数量随划分次数的变化情况 Fig.6 Changes of the Number of Scaned Point
从图7可知,不同划分次数下计算得到的坐标点(最优配重位置)分布较为集中,对所有坐标点进行极坐标转化并统计,可得样本均方差:

图7 最优配平位置的分布情况 Fig.7 Changes of the Optimal Counterweight Location

综上所述,该方法得到的最优位置可信。
4 结束语
本文提出了一种递进扫描方法,由于空间飞行器多飞行剖面(不小于3个)状态下的配重方案优化,并通过软件和飞行器实测数据对算法的有效性进行了仿真验证,仿真结果表明该方法能够快速、有效给出优化结果,且优化结果可信。