基于振动信号的高速铁路高压断路器故障诊断研究
2023-01-11刘浅
刘 浅
0 引言
截至2021年底,我国高速铁路运营里程超4万公里。在中国高速铁路建设、运营里程快速攀升的同时,为了更好地落实党中央“交通强国”的工作部署,中国国家铁路集团有限公司颁布了包含智能高铁大脑平台、智能建造、智能装备、智能运营,并在此基础上开展基于信息物理融合系统的智能高铁方案[1],作为我国高速铁路的发展规划。
智能牵引供电系统作为智能高速铁路的重要组成部分,已由科研、试验走向了工程实际应用,并形成了完善的技术架构、明确的功能组成和系列化的技术条件,极大提升了我国牵引供电系统安全可靠性及可维护性[2~5]。断路器尤其是高压断路器作为高速铁路牵引供电系统中切断电流、保护动作的重要设备,其服役性态的状况不仅影响牵引供电系统自身的安全稳定,也时刻影响着外部电力系统的运行状态。因此,有必要在传统断路器的基础上进行智能化升级,实时获取断路器的监测、监控和运行信息的全息感知[6];构建涵盖断路器设备本体、智能组件及智能汇控柜的智能断路器方案[7,8]。虽然高压断路器的故障类型多种多样,但是基于神经网络的故障诊断正确率高,易于工程实现[9];可以有效减少过早或不必要的停电试验和检修,降低维护费用,提高牵引供电的可靠性。
智能断路器为智能牵引供电系统中智能一次设备的重要组成,将信息技术、传感器技术、自动控制技术与传统断路器有机结合,实时获取断路器的监测、监控和运行信息,实现断路器的控制、监测的信息化[10,11]。本文从牵引供电系统高压断路器的结构入手,简述高压断路器的故障机理及故障表征,制定基于深度自编码模型的断路器故障预测方案;详述基于深度自编码模型的断路器故障预测时的数据预处理、特征提取及模型训练等步骤,并通过现场实例验证基于深度自编码模型的断路器故障预测方案的准确性。
1 高压断路器故障特征量的选取及处理
1.1 高压断路器故障特征量的选取
高压断路器作为高速铁路牵引供电系统中起着切断作用的关键设备,在实际运营中不可避免地不断进行分、合闸操作;分、合闸操作时机构间的碰撞、摩擦等振动事件均会反映到振动信号中。根据实际运行数据,高压断路器故障主要可分为机械故障、绝缘故障两大类,其中断路器机械故障(主要包括拒动、误动)占到了断路器总故障的70%;故当高压断路器处于故障状态或临近故障状态时,其分、合闸等一系列操作所产生的振动信号必定与其正常状态下的振动信号不同。因此,可通过监测高压断路器工作时所发出的振动信号,对高压断路器的服役状态进行判断,实现断路器的故障诊断。
1.2 高压断路器振动信号的提取
可在传统高压断路器的基础上集成断路器机械特性IED(智能电子设备)、SF6气体IED、电流在线监测IED于一体,采用光增量型位移编码器、SF6一体化传感器、高精度霍尔电流传感器对断路器的位移特性、气体微水及压力、分合闸电磁铁及电机等进行全方位的监视,构建智能高压断路器,进而对高压断路器的振动信号进行实时监测。智能高压断路器构架如图1所示。
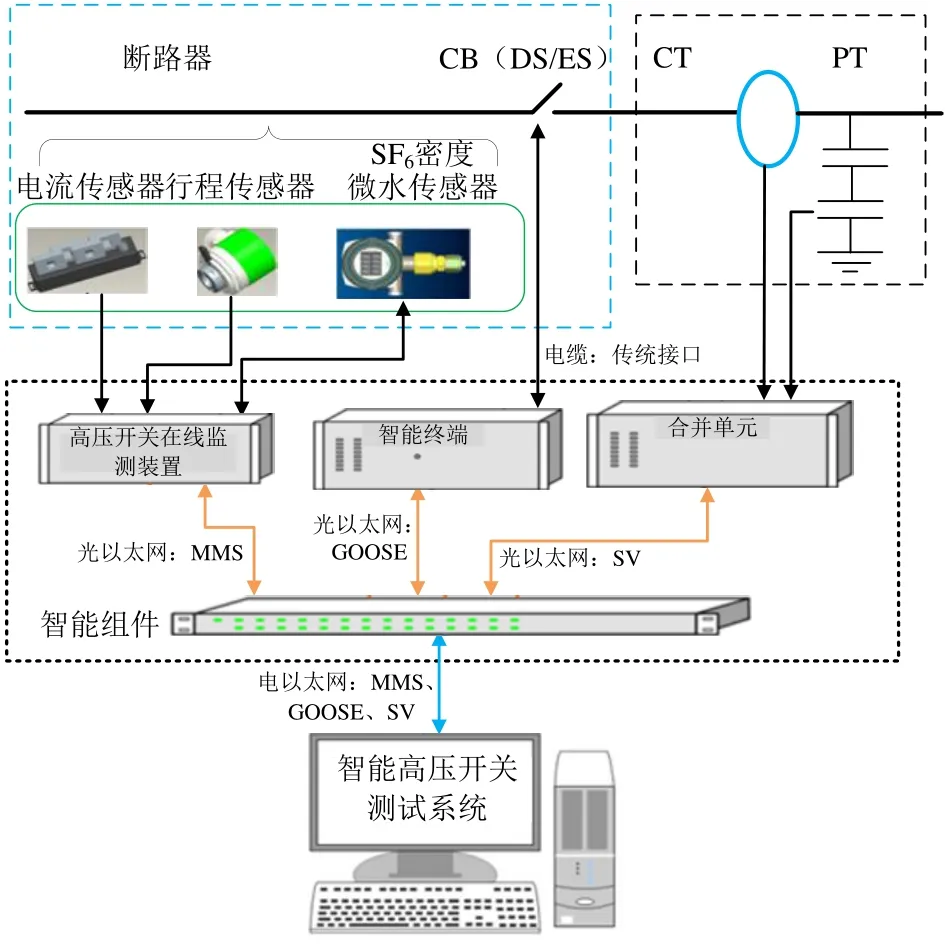
图1 智能高压断路器构架
1.3 振动信号的预处理
高压断路器的振动信号是一种频率成分复杂的加速度信号,具有非平稳、非线性的特点。在各种振动事件中,动静触头撞击和铁心撞击产生的振动信号是高频信号;其余各振动事件产生的振动频率分布于中低频段,且其分布频率具有随机性,即同一机构动作产生的振动信号在频域上存在一定差别。因此,对断路器振动信号的分析往往是基于对信号不同频带的分析。当高压断路器机械状态发生改变时,对应振动事件的频率、振动强度以及时间可能会发生改变。这些变化会改变每个频带内信号的分布情况,为了量化这种振动事件的变化,将提取不同时频子平面内的能量分布作为特征向量,用于高压断路器故障诊断。
高压断路器故障诊断中,实测信号的真实性及准确性直接决定了后续诊断的使用效果和精度。但实测信号在噪音、电磁干扰等外界环境的影响下往往包含大量冗余信息,故有必要对高压断路器振动信号进行预处理,尽可能还原真实的振动信号。
振动信号预处理步骤:首先精确截取实测信号中的分合闸振动部分,有效防止非分合闸振动对后续诊断带来的影响;其次采用去趋势化去除实测信号发生基线偏移的弊端;最后通过小波去噪去除噪声,尽可能保证分合闸振动信号的真实性。
完成振动信号的预处理后,利用小波包变换观察振动信号频率特性发生的变化。小波包变换广泛运用于特征提取领域,解决了小波变换只能对低频部分不断进行变换的问题,可将信号变换到不同的子频带中,这些子频带能够覆盖原信号的频带且每个频带带宽相等,能够对信号局部信息进行更好的时频分析,对于高压断路器振动信号这样的非平稳信号有着极好的适用性。
小波包变换只关注了不同振动事件在不同频域内的分布情况,而忽视了振动信号的时间特性,时间特性表征了振动过程中振动事件发生的相对顺序,也包含着十分重要的特征信息。高压断路器振动信号FMi(t)经M层小波包变换后,得到2M个频带的信号包络FMi(t),各频带范围为Fi,i=0,1,2,…, 2M-1。为了反映振动事件的时间特性,将各频带信号根据时域分为N份,此时时频平面被划分为M×N个不同的时频子平面。
1.4 振动信号的特征提取
选取某126 kV断路器的合闸振动信号进行特征提取,选取其中具有代表性的正常状态、操动机构卡涩、铁心卡涩以及基座螺丝松动4种机械状态进行特征提取。以正常状态为例,图2所示为完成去噪后正常状态下断路器的振动信号。该信号由多个振动事件产生的时间振动波构成,频率成分复杂,难以分析。
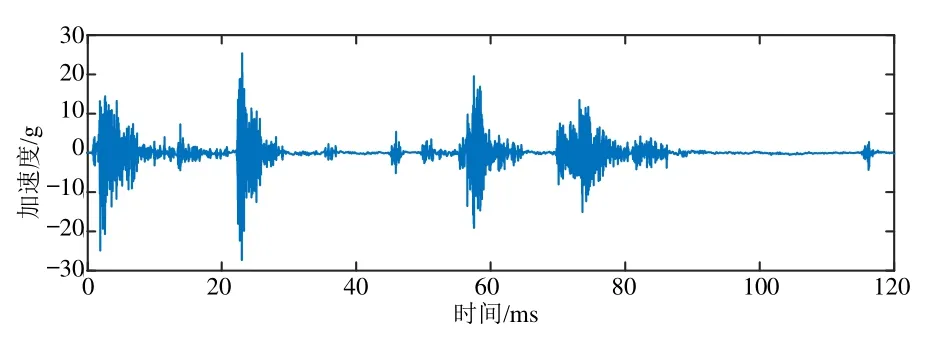
图2 正常状态时断路器合闸振动信号
为反映振动事件在不同频域中的分布情况,首先对信号进行小波包变换,经过多次试验,选取db10小波函数对预处理后的高压断路器振动信号进行3层小波包变换,变换结果如图3所示。
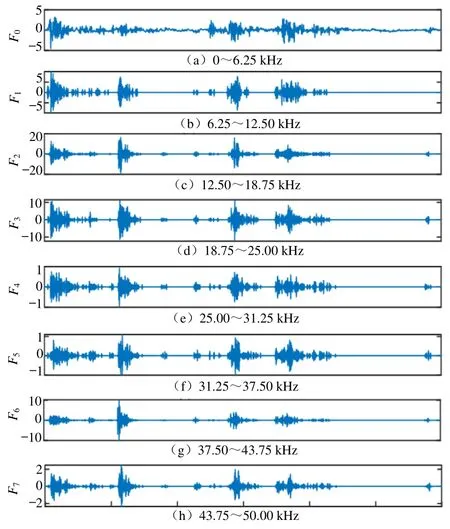
图3 振动信号的小波包分解
2 基于深度自编码网络的故障诊断方法
2.1 深度自编码模型简介
深度自编码网络是由多个自编码器堆叠形成的网络结构,其训练过程分为两个阶段。第一阶段是预训练阶段,即对自编码器进行从底层向顶层的逐层训练,当完成当前自编码器的训练后,将其隐藏层输出作为下一层自编码器的输入,并开始下一层自编码器训练,直至利用这种数据传播方式完成所有自编码器的训练过程。通过预训练过程可以完成网络初始的参数设置。第二部分是微调阶段,该阶段采用有监督的学习方式,由分类结果层向输入层对上一阶段得到的网络参数进行微调,使深度自编码网络趋向于全局最优,该过程与馈神经网络的训练过程相似。深度自编码网络结构如图4所示。
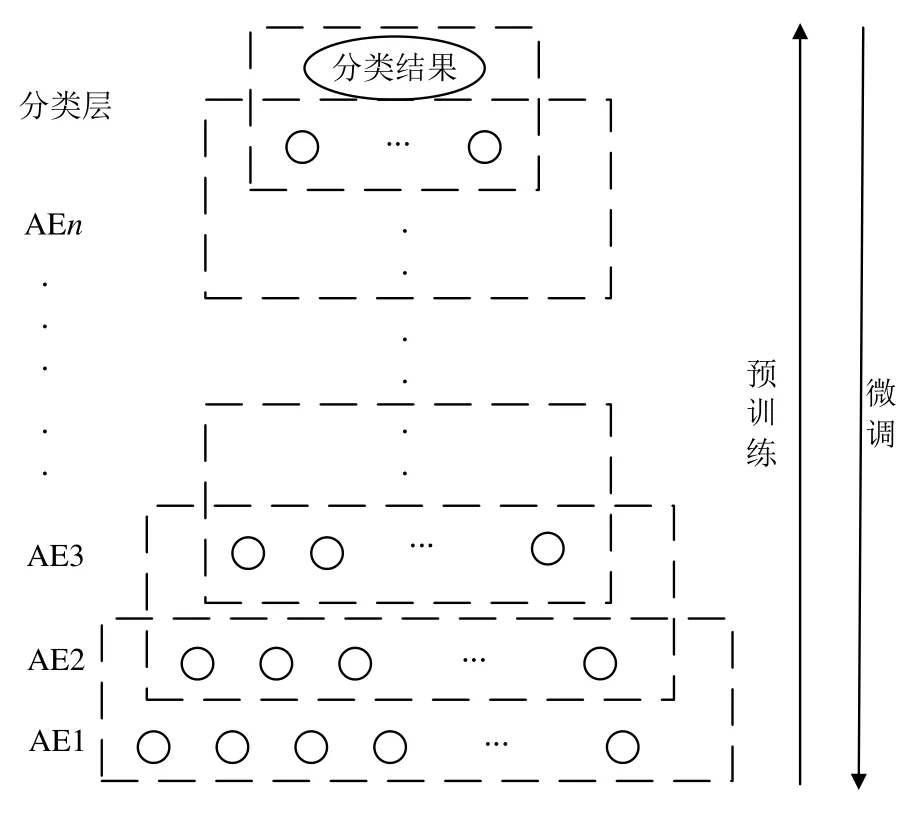
图4 深度自编码网络结构
2.2 深度自编码模型训练流程
自编码器是深度自编码网络最基本的组成单元,预训练过程就是对自编码器逐一进行训练的过程。本文以一层自编码器的训练为例,对深度自编码网络的预训练阶段进行详细介绍。
自编码器的训练目标是令输入层与输出层数据相同,是一种无监督的网络结构。自编码器结构与一般的神经网络相似,但输入层与输出层有着相同的神经节点数目。该网络通过输出数据重构输入数据的方式对网络参数进行不断优化,这个过程中隐藏层得到了输入数据的特征表达,输出层再通过该特征表达重构输入层数据,使输入层输出层尽可能相等,此时隐藏层的特征表达就能够认为包含了输入数据的全部信息。将该特征表达作为下一层自编码器的输入层数据,逐层构建深度自编码网络,深度自编码网络就能够学习到输入数据的深层特征。自编码器的网络结构如图5所示。
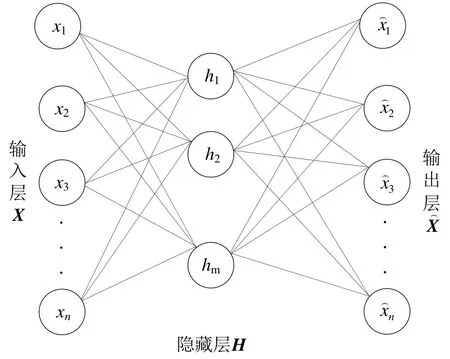
图5 自编码器网络结构
自编码器各层内部的神经元间不连接,层与层之间神经元通过不同的权值全连接。假设自编码器的输入信号X= {x1,x2, …xn},经训练后可以得到隐藏层数据H= {h1,h2,…hm},该过程被称为编码。其中n表示输入层神经元个数,m表示隐藏层神经元个数。则输入层数据xj与隐藏层数据hi的关系可表示为

式中:wi,j表示输入层神经元xj与隐藏层神经元hi间的权值,bj表示隐藏层偏置。
隐藏层数据H通过网络参数计算可以获得输出层数据。从隐藏层数据得到输出层数据的计算过程称为解码,其过程式为

式(1)、式(2)中f和g分别为隐藏层和输出层的激活函数,本文中f和g两个激活函数均为sigmoid函数,如式(3)所示。

为使输入数据和输出数据尽可能相等,本文需要定义一个目标函数表示输入层数据X与输出层数据的相似程度,这种相似程度通过损失函数L(X)表示:

为进一步去除隐藏层输出中的冗余信息,更高效地表达输入数据特征,本文在隐藏层单元加入稀疏惩罚项,对损失函数进行稀疏性限制。采用相对熵作为稀疏惩罚项,设网络参数为θ,训练集S= {x1,x2,…xm} ,则损失函数J(θ)表达式为

式中:β为稀疏惩罚的稀疏权重;pj为隐藏层第j个神经元在训练集上的平均激活程度;ρ为设定的稀疏参数;KL(ρ‖pj)为神经元平均激活程度pj与稀疏参数ρ间的相对熵,即

式(5)、式(6)中隐藏层第j个神经元在训练集上的平均激活程度pj均可通过式(7)计算。

式中:m为输入自编码器的样本个数;hj,i为在输入第i组数据时隐藏层第j个神经元的输出结果。
对自编码器进行训练的目的是不断调整权值参数wi,j、和偏置bj、,使损失函数J(θ)达到最小,其训练流程如图6所示。
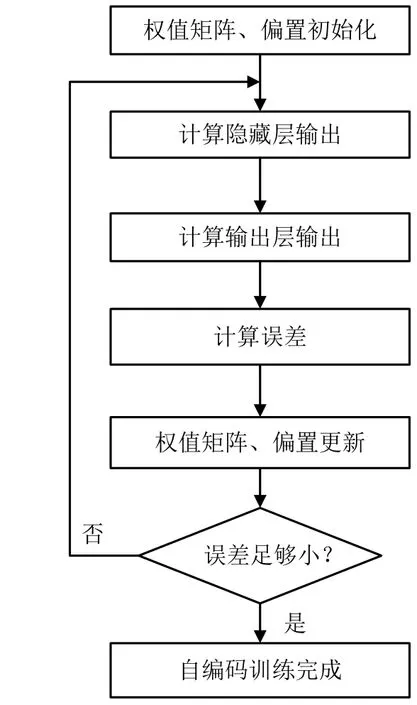
图6 自编码器训练流程
通过梯度下降算法可以不断更新权值和偏置,寻找最优的网络参数使损失函数达到最小,如式(8)所示:
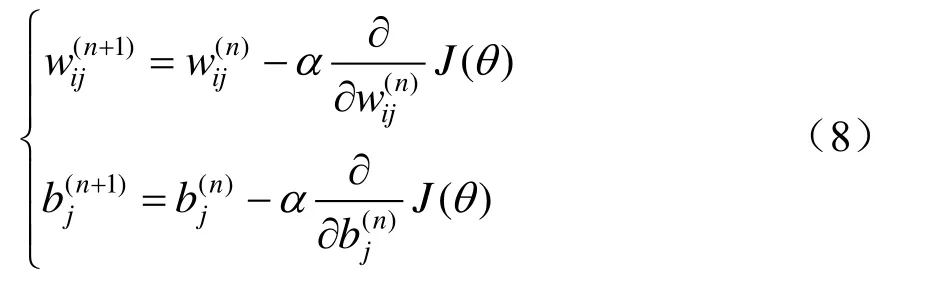
式中:α为学习率,能够对网络参数的更新步长进行控制。
当某层自编码器训练完成后,输出层数据与输入层数据基本相等,而这一过程是由输入层数据进行编码得到隐藏层数据、隐藏层数据进行解码得到输出层数据两个步骤完成,因此可以认为隐藏层数据包含了输入层数据的全部信息,可以作为特征使用。深度自编码网络就是将该自编码器隐藏层的输出作为下一层自编码器的输入,当进行下一层训练时完成训练的自编码器参数保持不变,实现输入数据的特征挖掘。
通过深度自编码网络的预训练阶段可以有效地初始化网络连接参数,防止网络欠拟合的情况发生。预训练阶段是对深度自编码网络进行无监督的学习,能够初始化网络连接参数;而微调阶段则是保留预训练网络连接参数的同时,用少量带标签的数据进行有监督的学习以对其进行优化,网络收敛较快,且不易陷入局部最优,使训练模型能够达到全局最优。深度自编码网络训练过程中,对整个深度结构进行微调,优化了局部层次的决策规则,使最终结果更加可靠。
2.3 深度自编码模型数据标准化及特征提取流程
通过特征能够提取得到高压断路器合闸振动信号的时频能量分布,但由于各时频子平面内能量量级差异较大,直接用于训练会对深度自编码网络的训练效果产生影响,从而进一步影响故障诊断的准确性。因此,首先要对时频能量分布进行Z-score标准化处理,提高数据的可比性。
通过原始数据的均值与标准差对数据进行Z-score标准化处理,处理后数据满足均值为0、方差为1的标准正态分布。原始信号X经标准化后得到数据Y,如式(9)所示。

式中:μ为原始数据的均值,σ为原始数据的标准差。
对于本文中的时频能量分布来说,X是不同振动信号中相同时频子平面内的能量,经Z-score标准化处理后,不同时频子平面内的能量将都属于同一量级,有利于后续进一步识别分析。
深度自编码网络输入层节点数即为特征提取过程中时频子平面的数量。提取原始信号数据表示化后的数据特征,即将合闸振动信号进行M层小波包变换,再将各频带信号等时间分为N份,得到 2M×N个时频子平面,因此输入层将有 2M×N个神经节点。小波包变换的层数M决定了频率分辨率,时间分段数目N决定了时间分辨率。分辨率过低将不能检测出小幅度频率及时间波动引起的变化;分辨率过高会将正常的频率、时间波动误判为故障,且网络的训练时间也会加长。因此,小波包变换层数M及时间分段数目N的选择是影响深度自编码网络故障识别效果的重要因素之一。
为确定小波包变换层数M及时间分段数目N的大小,从而进一步确定输入层神经节点数目,对合闸振动信号设置2~5层小波包变换,将各频带信号等时间分为4~40份,且设置实验中网络深度为3层,隐藏层节点分布设置为恒定型,其故障识别效果如图7所示。
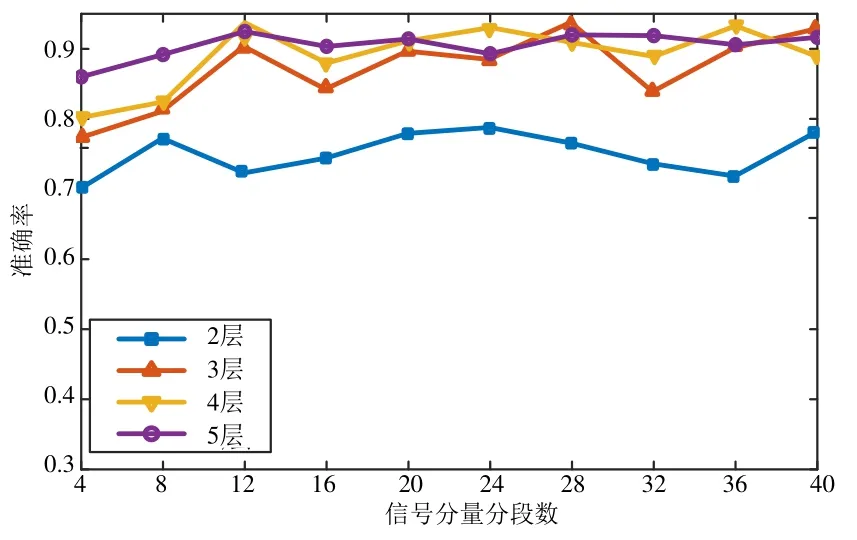
图7 自编码器训练流程
由图7可知,当小波包分解层数为2~5层时,故障识别准确率均呈现随时间分段数目N的增加先上升,再上下小范围波动的情况。当时间分段数目N保持不变时,故障识别准确率大致随小波包变换层数的增加而上升;但当N足够大时,3、4、5层小波包变换后最终准确率基本相等。因此,对振动信号进行3层小波包分解,并将各频带信号等时间分为12份,得到96个时频子平面,此时深度自编码网络故障识别准确率较高,且训练耗时较短。综上所述,深度自编码网络输入层节点数为96。
深度自编码网络由多个自编码器堆叠形成,自编码器的数量决定了网络的深度。通过隐藏层间的层层映射,深度自编码网络中的输入层数据不断被挖掘,获得更加高级的特征。通常情况下,堆叠的自编码器数量越多,网络层数越深,则最后隐藏层挖掘到的特征更加抽象也更加接近于本质,越有利于故障识别;但随着网络层数的不断加深,训练时间不断加长,同时也可能将训练样本本身的独有特性作为所有样本均具有的普适特性,从而陷入过拟合的情况。
堆叠1~6个自编码器形成结构不同的6个深度自编码网络进行比较,最后确定适用于该领域的深度自编码网络深度。深度自编码网络输入层含96个神经节点,每个自编码器迭代500次,学习率为0.1,其故障诊断效果如表1所示。
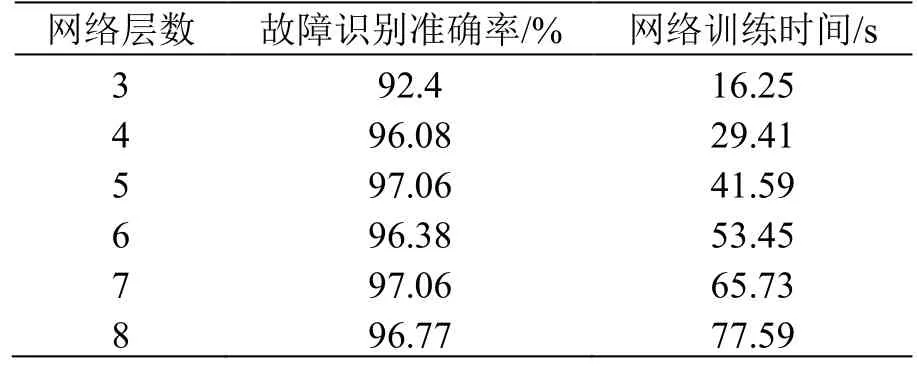
表1 条件概率参数
由表1可知,深度自编码网络中,堆叠的自编码器数量并不是越多越好,随着网络层数的上升,故障识别准确率呈现先上升再稳定的趋势。这是因为随着深度自编码网络深度的不断增加,训练时产生的误差积累以及冗余信息将干扰正常的网络训练过程,使故障识别更加困难;且随着网络深度的增加,训练该网络的时间成本也随之增加。因此,考虑准确率及训练耗时两方面因素后,本文选择将堆叠2个自编码器即4层深度的深度自编码网络用于高压断路器故障识别。
3 基于现场实例的模型验证
以某铁路项目现场实测数据为基础,对基于深度自编码网络的断路器故障诊断方法进行验证。首先对断路器正常状态、操动机构卡涩、铁心卡涩以及基座螺丝松动 4种常见的机械状态进行故障诊断,对其进行编码如表2所示,诊断结果对应的不同编码表示不同的机械状态。
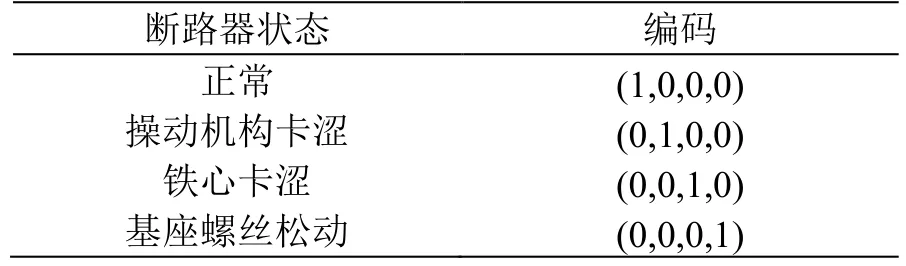
表2 条件概率参数
随机采用 240组现场实测数据进行预训练以及微调,其中正常状态100组,操动机构卡涩40组,铁心卡涩40组,基座螺丝松动60组;102组数据作为测试集,其中正常状态36组,操动机构卡涩19组,铁心卡涩21组,基座螺丝松动26组。
断路器各工作状态分类准确率如表3所示,可见:该诊断方法对断路器故障类型识别准确率较高,完成深度自编码网络的训练后,最终故障诊断准确率可高达 98.04%;该诊断方法对铁心卡涩故障识别准确率较低,对其余状态的识别准确率较高。
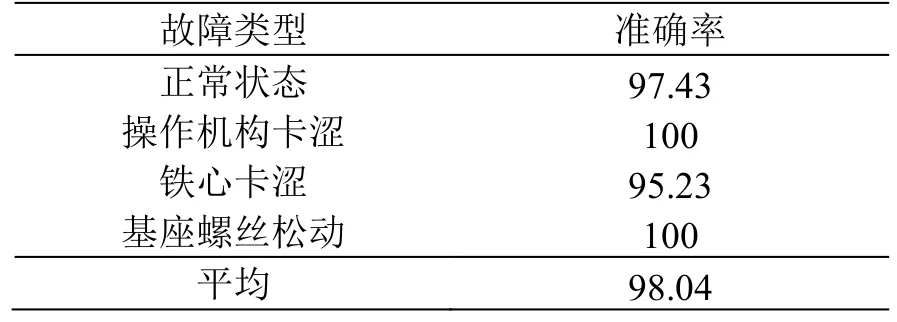
表3 各工作状态分类准确率 %
如图8所示,对诊断情况进一步深入分析,该故障诊断模型易将高压断路器的正常工作状态、铁心卡涩与基座螺丝松动混淆。可能存在两方面的原因:一是训练样本数量较少,导致深度学习网络未能进行足够准确的学习;二是特征提取方法需要改进,如改进小波包变换中频带混叠的问题等,从而提高时频特征的准确性。
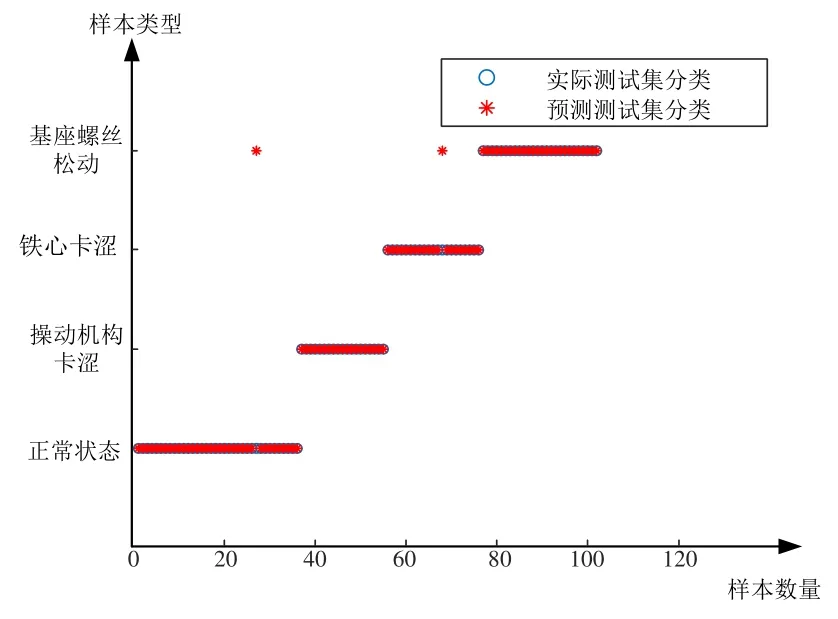
图8 故障诊断结果
4 结语
本文从牵引供电系统高压断路器的结构入手,简述了高压断路器的故障机理及故障表征形式,选取高压断路器日常运行时的动作信号作为故障预测模型的关键参量,制定了基于深度自编码模型的断路器故障预测方案;详述了基于深度自编码模型的断路器故障预测时的数据预处理、特征提取及模型训练等步骤,并通过现场实例予以验证,得到以下结论:
(1)基于深度自编码模型的断路器故障预测方案可对高压断路器的服役状态进行准确判断,减小了现场运维的工作量,提高了牵引供电系统的安全可靠性。
(2)目前该断路器故障预测方法依赖于断路器振动信号的提取,对断路器绝缘类故障缺乏判断能力,可通过智能断路器的SF6气体监测单元并设置阈值报警的方式予以解决。
通过现场实例可知,本文提出的基于高压断路器振动信号特征参量构建深度自编码网络的故障预测方案对于高压断路器的机械类故障识别有着较高的准确率,对现场设备的维修具有很强的指导作用,具有广泛的应用前景。
