分布式推进垂直起降固定翼的过渡走廊边界研究
2023-01-11程宇轩周洲王科雷
程宇轩,周洲,王科雷
(西北工业大学 航空学院,陕西 西安 710072)
垂直起降固定翼飞行器综合了固定翼飞行器和垂直起降飞行器的优点,具有对起降场地要求低、机动性好、巡航时间长等优势,因此成为了当今航空领域的研究热点[1]。垂直起降固定翼飞行器的飞行过程可分为垂直起降状态、巡航状态以及过渡状态,其中过渡状态连接垂直起降状态和巡航状态,起到了承上启下的作用。在这一过程中,飞行器处于变体、变速的状态,难以控制,因此过渡状态是整个飞行过程中最关键也是最危险的状态[2]。过渡走廊由垂直起降固定翼飞行器在过渡模式下的速度包线组成,为了确保过渡状态的安全,垂直起降固定翼飞行器的过渡状态必须保持在过渡走廊内部,因此过渡走廊的面积大小、宽窄等是评价垂直起降固定翼飞行器过渡难度和安全性的关键因素和指标,对于飞行器的总体设计和气动布局设计具有重要的参考价值。其次,基于过渡走廊可以确定飞行器的过渡起始速度点、过渡路径以及过渡终止速度点等参数,对于飞行器的控制系统设计也具有一定的指导意义[3]。
对于垂直起降固定翼飞行器过渡状态的相关问题,国内外学者开展了一定的研究。Vuruskan等[4]针对一种垂直起降飞行器(TURAC),建立了过渡状态的非线性数学模型,考虑自由来流和螺旋桨诱导气流对无人机的气动效应进行了过渡状态的仿真。Yuksek等[5]在建立完整的过渡状态非线性数学模型后,设计了2种过渡方案,并制定了方案内各状态点的前飞速度、迎角以及对应的动力系统推力。Hegde等[6]基于PD控制,针对一种倾转三旋翼无人机设计了高度和姿态控制器,并通过仿真验证了控制器在过渡状态的良好表现。Liu等[7]提出了一种面向任务的权重选择方案,以保证一种推力矢量垂直起降无人机的过渡状态能够适应不同的任务和飞行条件。王春阳等[8]针对涵道式垂直起降固定翼无人机飞行过程中的悬停和过渡2个飞行状态,进行了纵向的稳定性研究。陈琦等[9]针对倾转三旋翼无人机过渡状态中的高度保持问题进行研究,提出一种新的过渡策略,使飞机可以直接从悬停状态开始过渡转换而不需要获得一定初始速度。俞志明等[10]以倾转四旋翼(QTR)飞行器为对象,研究了过渡走廊包线的确定方法,并根据飞行器特点研究了操纵策略。
本文针对一种分布式推进垂直起降固定翼飞行器,基于牛顿欧拉法建立其在过渡状态下的纵向平衡方程。对于方程中所涉及的升力风扇系统以及分布式涵道系统,采用滑流理论,引入涵道影响因子修正,得到对应的动力特性模型,并通过试验对所得模型进行了验证。在此基础上,从机翼升力特性和动力单元需用功率2个限制条件出发,进行分布式推进垂直起降固定翼飞行器的过渡走廊研究,最终得到多重限制下的分布式推进垂直起降固定翼飞行器过渡走廊边界。
1 过渡走廊求解模型
本文研究的分布式推进垂直起降固定翼飞行器主要由机身前部的升力风扇系统和机身尾部的分布式涵道系统提供动力。飞行器纵向对称面内所受外力如图1所示,图中Tfan,Tduct分别表示升力风扇系统和分布式涵道系统产生的力,FL,FD以及Mm分别表示飞行器的升力、阻力和俯仰力矩。飞行器定常飞行要求作用在飞行器上的合外力/力矩必须为零,那么如果飞行器有一定的前飞速度,必然会产生相应的阻力,此时动力系统产生的拉力就必须克服由前飞产生的阻力,同时为了保持自身的飞行高度,在竖直方向上也必须保持受力平衡。除此之外,动力单元的作用点不同且与重心不重合,会对飞行器重心产生不同的力矩,因此飞行器的姿态也应该保持稳定即合外力矩平衡。

图1 作用在分布式推进垂直起降飞行器上的外力
根据图1可以得到纵向平面内的合外力和力矩的平衡关系:
式中:α为机身迎角;θ为飞行器俯仰姿态角;lfan,lduct分别表示升力风扇系统和分布式涵道系统相对于机身重心的力臂长度;γduct表示分布式涵道系统的倾转角,垂直起降状态下为90°,巡航状态下为0°。
2 过渡走廊限制条件
在过渡走廊的包线内,分布式推进垂直起降固定翼飞行器在分布式涵道系统倾转任意角度和任意飞行速度下都能实现定常稳定飞行,而飞行器定常稳定飞行的前提条件是升力不小于重力。对于分布式推进垂直起降飞行器,为其提供升力的主要部件为机翼、升力风扇系统和分布式涵道系统,因此需要从机翼升力特性和动力单元需用功率的限制条件来确定过渡走廊边界。
2.1 机翼升力特性限制边界
在起降模式下的悬停状态,分布式推进垂直起降固定翼飞行器机体的重力完全由升力风扇系统和分布式涵道系统平衡。当分布式涵道系统的倾转角逐渐减小,机体重力从主要由升力风扇系统和分布式涵道系统平衡逐渐过渡为主要由机翼升力平衡,直至巡航状态完全由机翼升力平衡。
一方面,当机翼迎角超过失速迎角时,机翼升力迅速下降,进入到危险的失速状态,认定在此状态下分布式推进垂直起降固定翼飞行器不能安全正常飞行,在过渡过程中应避免进入这一状态;另一方面,当机翼迎角低于零升迎角时,机翼会产生负升力,即升力方向指向机翼下方,在此状态下机翼成为负载,升力风扇和分布式涵道的需用拉力激增,分布式推进垂直起降固定翼飞行器同样不能安全正常飞行,过渡过程中也应避免进入这一状态。综上所述,分布式推进垂直起降固定翼飞行器在飞行时应保证机翼迎角始终在安全区域内,而安全区域的上下限分别由机翼失速迎角和零升迎角决定,可通过(4)式最终确定安全迎角范围。

(4)
式中:αstall表示机翼的失速迎角,α0表示机翼的零升迎角;i表示机翼安装角。
2.2 功率限制边界
分布式推进垂直起降固定翼飞行器在倾转过渡过程中,其最大前飞速度受升力风扇系统和分布式涵道系统的需用功率与动力稳定性等因素限制,其中最基本、最重要的限制因素为动力系统的需用功率。因此除了满足机翼升力特性的限制,分布式推进垂直起降固定翼飞行器在过渡状态下,同样要满足升力风扇系统需用功率、分布式涵道系统需用功率以及动力单元总需用功率的限制,以确保在过渡过程中,升力风扇系统和分布式涵道系统都有足够的可用功率。对于机身前部的升力风扇系统,本文采用滑流理论进行建模,可以将空间气流的流速、升力风扇系统以及需用功率联系起来。滑流模型基于以下几个基本假设:①空气是无黏不可压的理想气体;②升力风扇是均匀作用于空气的无限薄桨盘,且流过桨盘的气流在平面各点处为一常数;③不考虑风扇旋转引起的滑流扭转;④在定常飞行中,滑流不存在周期性变化。
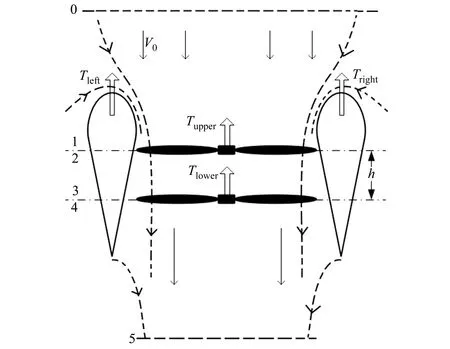
图2 升力风扇系统滑流示意图
升力风扇系统的滑流模型如图2所示,将上下风扇视为无限薄的2个圆盘,分别将0,1之间的流场、2,3之间的流场及4,5之间的流场作为上、中、下控制体进行分析。在空气是理想气体的假设前提下,上、中、下各处的控制体均满足伯努利方程
由于升力风扇改变了空气的能量,1,2以及3,4之间流场并不满足伯努利方程,但是由于通过流场的空气质量不变,因此仍满足质量守恒定律,且由质量守恒定律可得
式中,A1与A2相等,均为桨盘面积,可以得到
V1=V2=V0+vi
(10)
同理可得
V3=V4=V0+vi
(11)
由1,2之间流场以及2,3之间流场的质量守恒定律可得上下桨盘之间的诱导速度相等,均为vi。在建模分析过程中,本文不考虑切向诱导速度的影响,只考虑轴向诱导速度。对于升力风扇系统,轴向诱导速度变化不大。相对于孤立风扇,上风扇的下洗流对下风扇的影响占据了主导地位,由于涵道的存在,本文所研究的升力风扇上、下风扇之间的干扰作用变得相同。令桨盘面积为A,涵道出口(平面5)处面积为Ae,涵道尾流扩散比δfan=Ae/A,则出口速度
(12)
升力风扇的上下扇叶产生的拉力分别为
Tupper=(p2-p1)A
(13)
Tlower=(p4-p3)A
(14)
同时,入口处与出口处的压强均等于大气压p0,代入伯努利方程,联立求解可得升力风扇产生的拉力
T1=Tupper+Tlower=(p2-p1+p4-p3)A=
(15)
由滑流理论可知,功率取决于流过桨盘的诱导速度,拉力等于滑流的动量变化,可以求得升力风扇系统的总拉力
(16)
产生拉力需要消耗的理想功率
(17)
定义外部涵道产生的拉力与系统总拉力之比q为涵道拉力因子
(18)
式中,f是涵道高度c与涵道内径d之比的函数。可以看出,涵道拉力因子随着轴向速度增大而逐渐减小,即在悬停状态下,外部涵道产生的拉力最大。


悬停状态下V0=0,涵道拉力因子可写成
(19)
从(19)式可以看出涵道拉力因子最大值为0.5,即在理想条件下,不考虑唇口扰流、涵道壁摩擦以及扩散段压力损失等因素,外部涵道产生的附加拉力等于内部对转风扇的拉力。
此时升力风扇系统产生的总拉力为
(20)
消耗的理想功率为

(21)
而孤立的升力风扇在悬停状态下的理想功率为
(22)
比较(21)和(22)式可知,在悬停状态产生相同拉力的情况下,升力风扇系统的理想功率比孤立升力风扇的理想功率小32%。即在相同功率情况下,升力风扇系统的拉力比无涵道的孤立共轴升力风扇的拉力大17%,外部涵道的增升效果显著。
对于飞行器尾部的分布式涵道系统,其中每一个单元都可以视作单个的涵道螺旋桨,单个涵道螺旋桨的建模可以参照前文升力风扇系统,同样基于滑流理论进行,本文不再赘述。求得单个涵道螺旋桨的需用功率Pr,single之后,在不考虑单个涵道螺旋桨之间气动干扰的前提下,分布式涵道螺旋桨系统的总需用功率为
Pr,duct=nductPr,single
(23)
式中,nduct为分布式涵道螺旋桨系统中涵道螺旋桨的个数。
综合分布式垂直起降飞行器2个动力单元的推力和功率的数学模型,在倾转过渡走廊内,分布式垂直起降飞行器不仅要满足力和力矩的平衡关系,升力风扇系统与分布式涵道系统的总需用功率不能超过总额定功率,同时升力风扇与分布式涵道也应该分别受到对应额定功率的限制,即
(24)
3 过渡走廊计算及结果分析
基于前文所建立的分布式推进垂直起降固定翼飞行器的过渡走廊求解模型以及限制条件,对案例飞行器进行过渡走廊计算。案例飞行器动力单元主要包括直径600 mm的升力风扇系统和后排12个直径150 mm的涵道螺旋桨组成的分布式涵道系统。在飞行器的过渡阶段,假定其尾部的分布式涵道系统中各个涵道螺旋桨的倾转角度及螺旋桨转速保持一致,即不考虑分布式涵道系统对无人机的横航向差动控制。
3.1 动力单元模型验证
在进行过渡走廊计算之前,本文开展了分布式推进垂直起降固定翼飞行器前用升力风扇系统的地面试验以及尾部分布式涵道系统中单个涵道的风洞试验,以验证前文所建立的动力特性模型。
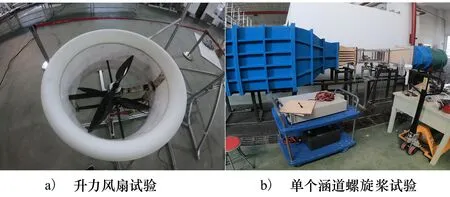
图3 动力单元特性试验
在试验数据的基础上,模型验证的具体结果如图4~5所示。
从图4和图5的升力风扇系统和单个涵道螺旋桨的理论模型与试验数据的对比结果可以看出两者较为接近。其中单个涵道螺旋桨的模型结果与试验数据相比存在效率略高的情况,其原因在于风洞内壁对涵道的抽吸有一定的阻塞影响。模型与试验误差在允许范围内,说明前文所建立的升力风扇系统和单个涵道螺旋桨理论模型的精度与可靠性满足过渡走廊的计算需求。

图4 升力风扇系统模型验证图5 单个涵道螺旋桨模型验证
3.2 升力特性边界求解
根据机翼升力特性的限制条件,首先给定机体迎角和前飞速度,在已知飞行器气动特性的基础上求得对应状态下作用在机身上的气动力,从而进一步求解过渡走廊阶段的纵向平衡模型以得到此状态下的配平所需升力风扇系统拉力、分布式涵道系统推力和涵道倾转角,分布式涵道系统倾转角随前飞速度的变化曲线即为所求过渡路线。其中零升迎角和失速迎角状态下的过渡路线共同组成由机翼升力特性所得的分布式垂直起降飞行器的过渡走廊边界。
图6给出了分布式涵道系统在不同迎角下随前飞速度的变化规律。从图中可以看出,在迎角较大的情况下,分布式推进垂直起降固定翼飞行器完成过渡过程,即分布式涵道系统倾转角减小至0°时,对应的前飞速度较小。而随着迎角减小,同一分布式涵道系统倾转角对应的前飞速度越来越大,其原因是迎角减小引起升力系数降低,为了保证飞行器的飞行高度保持不变,前飞速度必然会增大。

图6 分布式涵道系统倾转角与前飞速度的关系
图7和图8分别给出了分布式推进垂直起降固定翼飞行器在零升迎角和失速迎角下的配平结果。
在零升迎角下,随着前飞速度增大,分布式涵道系统倾转角和升力风扇系统拉力逐渐减小,分布式涵道系统推力逐渐增大。
其原因是分布式推进垂直起降固定翼飞行器在零升迎角下,虽然升力系数为零,但是阻力系数和俯仰力矩系数依然存在。随着前飞速度增大,分布式推进垂直起降固定翼飞行器受到的低头力矩逐渐增大,为了保证飞行器的力矩平衡,升力风扇系统拉力逐渐增大。升力风扇系统拉力的增大降低了飞行器对于分布式涵道系统推力在垂直机身方向上分量的需求,但是阻力的增加增大了飞行器对于分布式涵道系统推力沿机身方向分量的需求,这2种情况在不同的飞行阶段对分布式涵道系统的推力影响占比不同,因此分布式涵道系统推力出现了先减小后增大的变化趋势。

图7 零升迎角配平结果 图8 失速迎角配平结果 图9 机翼升力特性限制边界
在失速迎角下,随着前飞速度增大,分布式涵道系统倾转角和升力风扇系统拉力逐渐减小,分布式涵道系统推力逐渐增大,其变化趋势符合分布式推进垂直起降固定翼飞行器在低速状态下的气动力变化。当分布式涵道系统倾转角减小至0°时,对应的推力为503.6 N,升力风扇系统拉力为13.7 N,可以认为完成了过渡过程。
3.3 需用功率边界求解
在机翼升力特性过渡走廊内,并不是每个状态点都满足分布式垂直起降飞行器在过渡阶段的功率限制。基于升力风扇系统和分布式涵道系统的功率计算模型,对分布式推进垂直起降固定翼飞行器升力特性过渡走廊的状态点所对应的需用功率进行求解,得到分布式推进垂直起降固定翼飞行器动力单元所需功率随前飞速度以及涵道倾转角变化的曲面。曲面与功率限制条件平面相交,将交线投影至涵道倾转角-前飞速度平面,可将升力特性过渡走廊划分为安全区域和超限区域两部分。其中升力风扇系统需用功率边界、分布式涵道系统需用功率边界以及动力单元总需用功率边界共同组成了分布式推进垂直起降固定翼飞行器过渡走廊的功率限制边界。
图10~12分别给出了升力风扇系统需用功率边界、分布式涵道系统需用功率边界、动力单元总需用功率边界以及各自对应的安全区域和超限区域。从图10可以看出,升力风扇系统的需用功率与前飞速度呈正比,在涵道倾转角为0°的时候,最大前飞速度为25 m/s。而图11则体现出分布式涵道系统的需用功率在小倾转角、低速状态下会出现严重的超限现象,原因是小倾转角、低速状态对应的过渡迎角较大,此时重力在机身轴线上的分量较大,需要分布式涵道系统产生较大的推力以平衡机身轴线上的重力分量,从而造成了严重的功率超限现象,在前飞速度增大即对应过渡迎角相对减小的情况下,分布式涵道系统需用功率的超限现象得到了一定程度缓解。受到升力风扇系统和分布式涵道系统的影响,如图12所示,动力单元总需用功率同时具有前两者的变化特征以及限制区域和边界,但是总功率额度的增加,扩大了动力单元总需用功率的安全区域,说明后续可以通过改进功率分配方案来适配不同的过渡需求。提取3组限制边界,即可得到分布式推进垂直起降固定翼飞行器的功率限制边界,结果如图13所示。

图10 升力风扇系统需用功率边界 图11 分布式涵道系统需用功率边界 图12 动力单元总需用功率边界

图13 功率限制边界
从图13可以看出,相较于动力单元总需用功率的限制条件,升力风扇系统需用功率和分布式涵道系统需用功率限制条件下的安全区域更小,要求更为严格。
在升力特性和需用功率的限制条件下,最终得到分布式推进垂直起降固定翼飞行器的过渡走廊,其边界由零升迎角边界、失速迎角边界、升力风扇系统功率边界和分布式涵道系统功率边界共同组成,所得结果如图14所示。

图14 分布式垂直起降飞行器过渡走廊
4 结 论
1) 本文基于滑流理论,引入涵道影响因子,推导出升力风扇系统和涵道螺旋桨的动力特性模型,并开展了验证试验,试验结果证明推导得到的数学模型能够准确描述升力风扇和涵道螺旋桨的工作特性。
2) 本文分别计算了分布式推进垂直起降固定翼飞行器在不同过渡迎角下的过渡曲线,其中零升迎角和失速迎角对应曲线组成了机翼升力特性过渡走廊,结果显示飞行器安全过渡的最小前飞速度与过渡迎角呈反比。
3) 基于所得机翼升力特性过渡走廊,结合动力单元需用功率的限制,本文进一步计算得到了分布式推进垂直起降固定翼飞行器的功率限制边界,其中升力风扇系统在高速状态下超限,分布式涵道系统的需用功率则会在小倾转角、低速状态下出现严重的超限现象,而且升力风扇系统需用功率和分布式涵道系统需用功率的限制要比动力单元总需用功率的限制更加严格。
4) 对于垂直起降固定翼飞行器,本文所采用的方法具有一定的普适性,且在本文的基础上,可以通过改变设计参数,进行过渡走廊的敏感性分析,进一步得到垂直起降固定翼飞行器过渡走廊的影响因素,为后续控制策略研究和总体参数的二次优化设计提供参考。
