沪苏通长江公铁大桥塔梁同步施工线形测量技术
2023-01-09顾惠明
顾惠明
中铁大桥局集团有限公司,武汉 430050
斜拉桥塔梁同步施工是指在桥塔尚未封顶前,按轮次分节交替施工桥塔、架设主梁并挂设斜拉索,形成多工点立体并联作业。与传统先桥塔封顶后架设主梁工法相比,塔梁同步施工可有效缩短工期[1]。该工法的主要难点在于施工过程中塔、梁线形测量及控制,特别是跨径大、恒载重、对施工精度要求高的大跨度公铁两用斜拉桥[2]。由于塔柱、悬臂钢梁整体刚度较弱,在施工状态下因受荷载、索力不均等因素影响塔柱和钢梁产生显著变形,增加结构定位及线形控制的难度。已施工主塔、钢梁节段的累积线形偏差直接影响下一节段施工,需充分掌握其变形规律,并基于可靠的测量手段精确修正线形偏差。同时,在宽阔水域中测距较远,常规全球定位系统(Global Positioning System,GPS)静态测量方法误差大,难以满足大跨度桥梁定位精度需求。
针对上述问题,依托沪苏通长江公铁大桥提出线形测量技术方案及控制要点,并通过实桥数据验证其可行性。
1 工程概况
沪苏通长江公铁大桥主航道桥采用双塔五跨连续钢桁梁斜拉桥,跨度布置为(140+462+1 092+462+140)m,见图1。
主梁上、下层桥面分别搭载6车道公路及4线铁路。主塔采用钻石形钢筋混凝土结构,见图2。塔身为C60自密实混凝土,下游侧中塔柱上设置27 000 kN·m附壁塔吊。承台顶以上塔高为330 m,下横梁顶面以上塔高为270 m。

图1 主航道桥桥式布置(单位:m)

图2 主塔结构示意(单位:m)
主梁采用三主桁N形桁架形式,上层桥面为正交异性板结构,下层桥面为钢箱结构[3]。主梁桁高16 m、桁宽35 m,节间长度14 m,见图3。主航道桥共164个节间,主梁标准节段由两个钢梁节间组成。主航道桥设计采用432根直径7 mm 2 000 MPa级平行钢丝斜拉索,最大索长576 m,最大索质量83.5 t[4]。

图3 主航道桥标准节段钢梁横断面(单位:cm)
主航道桥主塔分55节(含塔冠)施工,上塔柱第39节混凝土浇筑完成且钢锚梁定位完成后,张拉首层斜拉索,开始塔梁同步施工,如图4所示。

图4 塔梁同步施工
在一个塔梁同步施工周期内,挂索施工滞后于主塔施工3个节段。施工上塔柱高6 m标准节段过程中同步定位安装两层钢锚梁,钢梁标准节段吊装过程中同步挂设斜拉索;架梁吊机前移后,继续挂设后方锚拉板处斜拉索,最后张拉到位。测量主塔时应保证斜拉索不挂设张拉,架梁吊机处于非起吊或走行状态,斜拉索张拉时应保证桥面荷载分布恒定[5-6]。
2 塔梁同步施工线形测量重难点
1)测量工序多,测量时现场要求高
塔梁同步施工过程中,主塔塔身、钢锚梁、钢梁测量工序多,定位安装精度要求高。主塔主要测量内容包括:①主塔已浇筑节段测量、主塔施工节段劲性骨架安装测量;②斜拉索张拉前后、索力调整后以及架桥机走行前后主塔测量;③钢锚梁安装测量及索导管定位测量;④塔柱模板安装测量。钢梁主要测量内容包括:①架梁吊机走行前后、斜拉索张拉后以及索力调整后钢梁线形测量;②钢梁节段吊装完成后钢梁高程测量。
2)主塔线形影响因素多,高空远距测控难度大
上塔柱高120 m,水平刚度较弱,引起主塔线形偏差的主要因素包括:①主跨、边跨钢梁自重和梁面荷载差异引起的纵向塔偏;②拉索索力不均引起的塔柱空间挠曲及扭转变形;③主塔不平衡荷载引起的塔柱空间挠曲变形;④施工期混凝土收缩徐变作用引起的塔柱空间挠曲变形。
塔梁同步施工阶段,主塔变形主要表现为纵向塔偏。已施工的主塔在出现纵向塔偏时,后续节段顺接将进一步放大偏离量,必须频繁测量修正。现场需在主塔非垂直状态下施工放样过程中进行坐标计算、复测控制。同时由于江岸测量控制点与桥塔距离过远,采用传统定位测量方法精度难以满足设计要求。
3)大节段钢梁悬臂架设及合龙线形控制难度大
钢梁大悬臂状态下整体线形受索力、临时荷载和墩顶起顶量影响显著,塔柱和梁面临时荷载需频繁统计并控制,预偏、纠偏难度大。主跨、边跨钢梁自重存在差异,为减小塔根纵向弯矩进而减小上塔柱纵向塔偏,需考虑配重控制。
3 塔梁同步施工线形测量实施路线
为确保测得的线形数据准确,测量作业需在风力不高于6级且环境气温相对恒定的夜间进行,保证塔上、梁面荷载以及索力无变化,即满足“静态”条件。塔柱节段内预埋一系列棱镜作为定位观测点,塔顶基准控制点三维坐标利用平距差分法、天顶投点法等方法测量,并通过基于图像识别的塔偏测量系统进行数据复核,再根据实测塔偏对施工节段塔柱特征点坐标进行修正。以塔顶基准控制点坐标反算塔顶结构物如钢锚梁、索导管、劲性骨架以及模板的定位坐标。可通过采集悬臂梁端后方两个节段的节点三维坐标,推算梁端拼接口前后相对拱度和整体线形。
4 主塔线形监测
4.1 测量控制网的建立

图5 测量控制网布置
主航道桥施工期间,主墩施工测量以首级控制网控制点作为基准,控制网布置如图5所示。施工控制点分布于主航道桥南侧大堤、北侧水上平台处,除南侧大堤处设置两个专用平面控制点外,其余施工控制点均兼作平面及高程控制点。
主塔在江中开阔水域,与现有岸边首级控制网控制点最近距离约840 m,无法满足施工规范和设计精度要求,须按照点位功能在不同施工区域(水上平台、桥墩承台顶)增设施工控制点(即加密测点),缩短视距。所有施工控制点处均安装强制归心装置,减小对中误差[7-8]。每次测量先对多个后视点坐标进行复核,然后进行测量。29#墩承台顶面上下游各设置一个强制归心控制点,作为主塔线形测量的后视点。在28#墩、29#墩两座主塔上下游塔柱铁路面位置增设施工控制点,作为钢梁线形测量控制点使用。
4.2 塔偏测量施工控制点布置与坐标推算
由于边跨、中跨钢梁不平衡力矩作用,上塔柱将产生纵向偏位。为保证成桥状态塔柱铅直,线形满足设计要求,在塔梁同步施工过程中需修正塔顶钢锚梁、索导管等结构的定位坐标,确保已挂索塔柱节段上方的自由节段顺接,使得主塔回归理论位置时呈铅垂状态。
自塔柱下横梁施工开始,依次在下横梁第9节、中塔柱第22和32节、上塔柱第34节以及塔顶节段设置20 cm×20 cm预留孔埋设棱镜,作为主塔线形测量的施工控制点,如图6所示。各棱镜定位于相应节段上、下游侧塔身中轴线上。通过天顶投点法复核塔顶基准控制点坐标,由施工控制点数据拟合形成主塔偏位曲线,再按割线法推算出待施工节段施工控制点的三维坐标,从而实现对理论设计坐标的修正,可指导后续塔顶结构物的定位施工。
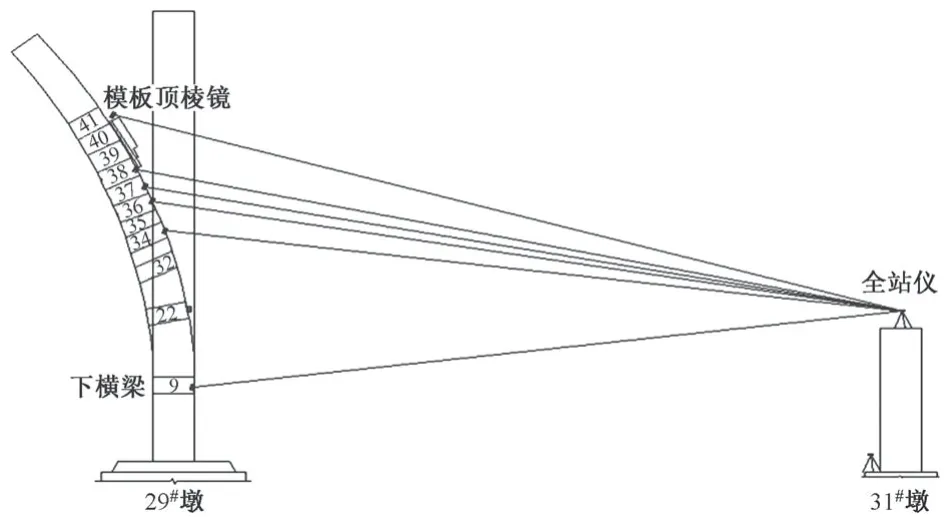
图6 塔偏测量施工控制点布置
主塔中塔柱第36节浇筑完成后,塔肢侧方附壁塔吊标准节及吊臂拼装就位,会造成主塔约2 cm侧偏,故需在中塔柱第35节施工完成后测量其下方各预设棱镜原始坐标,修正后续施工状态塔柱测量结果。
塔柱线形测量过程中架梁吊机处于非工作状态,附壁升降梯应落至最底部。附壁塔吊不得进行吊装作业,塔吊吊臂应垂直于桥轴线且前端指向塔肢内侧。
4.3 塔柱远距离测量
先采用两台全站仪分别对施工控制点观测4个测回,测回间坐标分量之差应小于3 mm。当坐标分量之差超限时应增加测回数,并剔除超限数据。然后分别观测主塔上下游侧所有棱镜,绘制主塔线形曲线,并记录观测时间、环境温度等信息。
上塔柱施工节段平面投影坐标测量采用平距差分法,如图7所示。其中:l1、l2分别为28#、30#墩墩顶承台施工控制点距双面棱镜处施工控制点的水平距离。

图7 平距差分法观测示意
测量具体方法为:①首先在待测主塔(29#墩处)承台顶面测点处设置双面棱镜,然后在对侧的28#主墩和同侧的31#边墩承台顶面测点处采用全站仪观测双面棱镜,并将实测平距之和(l1+l2)、桥轴线偏差和基准值进行差分修正,有效控制平面测量误差。②通过天顶投点法,先将投点中心设在塔柱几何中心,然后再观测待测主塔塔身及塔顶上的棱镜,确定各棱镜处坐标,包括塔顶基准控制点坐标。③根据实际线形修正塔顶主要结构物理论三维坐标后,采用交会法或GPS静态测量法确定施工节段钢锚梁、索导管、劲性骨架及模板安装位置
4.4 塔偏测量
塔梁同步施工过程中主塔会发生动态变形,为辅助测控塔柱变形状态,研发了基于图像识别的塔偏测量系统。该系统主要由高性能处理器、图像采集装置、长焦镜头、云台、特征标志件、测距模块、数据传输模块和分析软件组成[9]。在桥塔上塔柱既定位置设置标靶,通过在承台顶面搭设高精度摄像仪(天文级折光长焦镜头)对桥塔纵横桥向变形进行实时巡测。标靶标记点成像位置与基准图像中的对应位置发生变化时,系统自动分析标记点的位移,并实时显示主塔上多点纵横桥向位移时程曲线,并与预设的阈值进行对比。若超过阈值系统自动报警,从而实现变形预警功能。该系统测量精度不低于1 mm,有效测量距离不小于300 m,通过全天候跟踪测量,可有效校验主塔线形人工测量结果。
第52节塔柱浇筑完成后实测的塔顶最大纵向偏位为29 mm(图8),方向朝南(即朝边跨侧)。上塔柱变形趋势稳定,线形平顺,倾斜度小于1/3 000,线形控制结果满足设计要求。

图8 悬臂架设至E68节间、中跨合龙后钢梁线形对比
5 钢梁线形测量
5.1 大节段钢梁悬臂架设线形测量
大节段钢梁悬臂架设过程中钢梁线形的有效控制既是塔偏控制的基础,也是精准合龙的前提条件。一般通过调整梁面荷载和斜拉索索力分布实现纠偏[10]。
测量悬臂梁段三桁上下弦的轴偏时,以主墩顶梁面几何中心点为坐标原点,以对侧主墩梁面几何中心点作为后视方向建立相对坐标系进行测量。
为减少环境气温及日照对线形测量结果的影响,准确反映钢梁实际位置,钢梁各种状态下的测量作业均在夜间23:00~05:00进行。在钢梁节段整体吊装到位并焊接后,测量该节段及后方不少于两个节段的三桁上下弦共12个节点的三维坐标,拟合钢梁线形。测量时还应详细记录当前架梁吊机的位置、环境气温、钢梁表观温度和梁面荷载分布情况。
5.2 合龙线形测量
在梁面、塔上荷载基本不变的情况下,合龙前1~2 d连续测量南北两个合龙口钢梁姿态。跨中合龙前在悬臂梁段三桁上下弦合龙口设置里程、中线标志点,24 h连续测量,记录标志点三维坐标以及悬臂梁段总体线形,并绘制挠度-温度-时间图、轴偏-温度-时间图以及与合龙口相邻的6个节点里程-温度-时间图。分析因环境温度及日照变化引起的合龙口姿态变化规律,找到最佳合龙时机,并确定悬臂梁段纵向顶推距离。根据现场实测数据,通过张拉斜拉索、梁面配重等措施调整主梁线形,确保合龙口两侧钢梁线形平顺、一致。
钢梁合龙后,对全桥所有钢梁节点的三维坐标进行一次通测。桥面附属结构施工、成桥索力调整阶段,按照监测要求对部分钢梁节点有针对性地测量,监测钢梁线形的变化情况。
悬臂架设至E68节间、中跨合龙后钢梁线形对比见图9。在悬臂架设阶段,由于受力状态与成桥状态差异大,且制造误差不断累积,钢梁中桁上下弦最大轴偏为45 mm,发生在悬臂梁段中部,满足轴偏不大于L/5 000(L为悬臂梁段长度,475 m)的设计要求。中跨合龙后,索力进一步优化调整,钢梁应力重分配,钢梁中桁上下弦最大轴偏回归至30 mm,总体线形特征与施工阶段基本一致,侧面证实了塔梁同步施工过程中钢梁线形控制的必要性。

图9 悬臂架设至E68节间、中跨合龙后钢梁线形对比
6 结语
沪苏通长江公铁大桥主航道桥自2018年12月27日开始第35节塔柱施工,2019年7月7日塔冠封顶,2019年7月18日南侧辅助跨合龙。在塔梁同步施工期间,塔顶最大纵向偏位为29 mm,满足倾斜度不大于1/3 000的设计要求。钢梁中桁上下弦最大轴偏45 mm,满足不大于L/5 000的设计要求。各项成桥实测数据有效验证了塔梁同步施工测量技术的可靠性,可为后续大跨度斜拉桥相关测量技术研究提供参考。
