深度学习在雷达目标检测中的应用综述
2023-01-09施端阳张馨予
施端阳, 林 强, 胡 冰, 张馨予
(1. 空军预警学院, 湖北武汉430019; 2. 中国人民解放军95174部队, 湖北武汉 430040; 3. 中国人民解放军63650部队, 新疆和硕 841700)
0 引 言
目标检测作为雷达的基本功能之一,是雷达目标跟踪和目标识别的前提,其检测性能的好坏决定了雷达探测能力的高低。雷达接收的回波中,既有目标,也有杂波和噪声等干扰信号。雷达目标检测技术的本质是在噪声和杂波条件下对目标存在与否的判决问题和目标的定位问题。目标定位问题可以通过测量回波信号的延迟时间和雷达天线的方向性予以解决。判决问题是当前雷达目标检测面临的主要挑战。
早期的雷达大多采用非相参体制,没有专门的信号处理设备,目标检测功能是在雷达显示器上,通过人工观测回波幅度的高低来实现。虽然人工检测方法在目前许多雷达中仍有使用,但人工观测无法适应长时间的工作和大批量目标的处理。因此,需要雷达具备目标自动检测功能。雷达目标自动检测技术根据检测门限和判决准则判断是否存在目标。雷达目标自动检测的理论基础是统计检测理论。实际上,雷达回波信号的统计特性无法预知,导致检测门限难以确定。检测门限过高会造成漏警,检测门限过低会导致虚警。为了解决这个问题,恒虚警率(Constant False Alarm Rate,CFAR)检测技术[1]应运而生。但传统的CFAR检测技术主要通过回波能量实现目标检测,由于可用于参考的单元环境有限,易受到资源的限制,对于微弱目标易造成漏警[2]。
近年来,深度学习技术在光学图像处理领域的应用发展迅速,尤其在目标检测[3]、图像分类[4]和图像分割[5]等方面成果显著。由于雷达技术的进步,雷达分辨率逐渐提升,不同形式的雷达图像数据的质量越来越好。虽然雷达图像信息量比光学图像严重不足,在成像机理、目标特性、分辨率等方面存在差异,但深度学习强大的图像特征自动提取能力,为雷达目标检测技术提供了一种新的思路。在图像层面上,可将雷达目标检测视为一项计算机视觉任务,在图像中将目标与背景进行区分,并对每个目标进行精准定位和分类标签预测,从而实现雷达目标检测功能。
1 雷达目标检测研究现状
雷达目标检测技术受装备担负的使命任务和作战环境的影响[6]。目前的研究成果主要集中在利用天波超视距雷达和合成孔径雷达检测舰船目标[7-8]、探地雷达检测地下目标[9]、机载雷达检测高速运动目标[10]、穿墙雷达检测人体目标[11]、多输入多输出(Multiple Input Multiple Output,MIMO)雷达检测微弱目标[12]和无源雷达检测海面目标[13]等方面。虽然目标检测技术运用的雷达装备不同,检测对象各异,但其本质内容主要包括两个方面:一是目标信号是否存在的判决;二是检测时虚警概率的控制。
目标信号是否存在的判决问题可从多个角度来理解。在统计学上,可认为是典型的统计判决问题;在模式分类上,可视为一个二分类问题。前者根据回波信号的先验统计知识判断有无目标存在,后者根据目标和干扰在变换域上的特征差异对回波进行分类,以区分目标和干扰。因此,雷达目标检测方法可分为基于统计特性的方法和基于特征的方法,如图1所示。
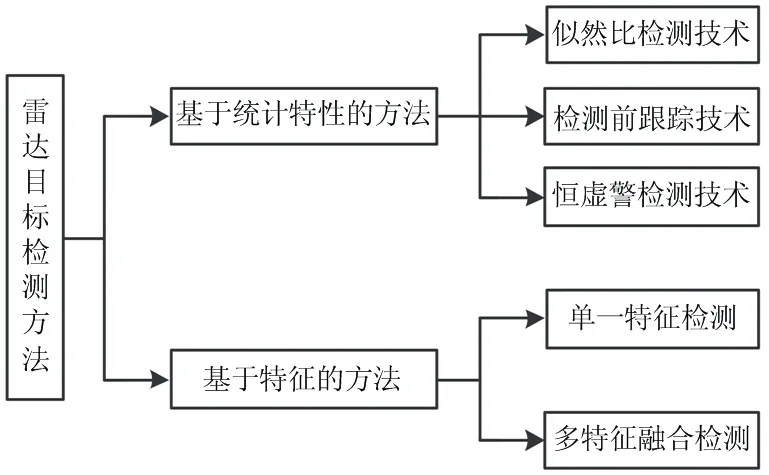
图1 雷达目标检测方法
虚警概率控制主要通过CFAR检测技术来实现。CFAR检测的门限根据被检测点的噪声、杂波等干扰的大小动态调整,在保持虚警概率不变的情况下使检测概率达到最大。
1.1 传统雷达目标检测方法
传统雷达目标检测方法主要是基于统计特性的方法,可分为似然比检测(Likelihood Ratio Test,LRT)技术、检测前跟踪(Track Before Detect,TBD)技术和恒虚警率检测技术。
1.1.1 似然比检测技术
似然比检测是基于统计特性的检测方法中最基础的检测理论,目前主要对其改进技术进行研究。针对目标机动过程中系统输入值未知时,标准广义似然比(Generalized Likelihood Ratio,GLR)检测器虚警概率降低的问题,提出了鲁棒性更强的自适应H0-GLR检测器。针对机载雷达在干扰环境下的多通道检测问题,提出了一步和两步GLR检测器。随后,频域平均似然比检测器和波束域变换广义似然比检测器相继被提出,前者证实了频率分集可以提高检测能力,后者在强干扰条件下仍具有很好的检测性能。为了减少对数据的依赖,催生了自适应全对称检测器和降维GLR检测器的发展。
此外,似然比检测技术还广泛应用于无源雷达和MIMO雷达。利用数字视频广播和气象监视雷达作为辐射源的低复杂度GLR检测器,在不降低多普勒分辨率的同时具有较好的检测性能。基于粒子滤波的LRT方法和GLR检测器,检测性能均优于传统MIMO雷达目标检测方法。
1.1.2 检测前跟踪技术
检测前跟踪技术是将连续的多帧数据进行能量积累后与门限进行判决,实现目标检测,再通过航迹回溯,实现目标跟踪。TBD同时利用了单次扫描脉冲串积累和多次扫描间积累,对微弱目标具有较好的检测能力。典型的TBD原理框图如图2所示。信号处理进行杂波抑制和脉冲串积累。预处理不是必需的步骤,因此用虚线表示,其作用是减少后续需要处理的数据量。跟踪并积累实现在跟踪的同时进行扫描间积累,以获得目标假设航迹。当通过跟踪能够得到合理的航迹,且目标函数超过检测门限时,检测处理做出目标存在的判决并输出目标航迹。TBD的核心是目标航迹跟踪,按照航迹跟踪方法可分为批处理检测跟踪方法和递归检测跟踪方法两类。前者以动态规划(Dynamic Programming,DP)算法和霍夫变换(Hough Transform,HT)算法为代表,后者以粒子滤波(Particle Filter,PF)算法[14-15]、三维匹配滤波(Three Dimensional Matched Filtering,3DMF)算法[16]和级假设检验(Multilevel Hypothesis Testing,MHT)算法[17]为代表。

图2 典型TBD原理框图
在传统TBD方法的改进上,刘红亮等[18]充分利用跟踪信息设计了预测波门内的多帧联合检测方法,提高了检测性能和跟踪维持性能。张奕群等[19]将噪声引入直方图概率多假设跟踪算法中,对多目标在低信噪比时具有更好的跟踪检测能力。
1.1.3 恒虚警率检测技术
恒虚警率检测技术按背景环境分为杂波中的CFAR检测和噪声中的CFAR检测,分别对应背景快起伏和慢起伏两种状态。杂波的统计特性比噪声的更复杂。因此,目前的研究对象主要是杂波中的CFAR检测。杂波中的CFAR检测技术按数据帧数可分为基于单帧的参量型CFAR检测、非参量型CFAR检测和基于多帧的杂波图检测。
参量型CFAR检测主要用于杂波分布模型已知的情形,具体可分为通用参量型CFAR和专用参量型CFAR。常规雷达分辨率较低,在CFAR检测时假设背景杂波服从瑞利分布,一般采用通用参量CFAR。针对均匀杂波提出了单元平均恒虚警(Cell Averaging,CA-CFAR)检测算法。针对非均匀杂波提出了选大恒虚警(Greatest of,GO-CFAR)和选小恒虚警(Smallest of,SO-CFAR)检测算法。针对多目标场景提出了有序统计恒虚警率(Ordered Statistics,OS-CFAR)检测算法。文献[20]对上述四种通用参量CFAR检测算法的优缺点进行了对比分析,为实际应用提供了指导。高分辨率雷达的杂波幅度概率分布更为复杂,常假设其服从Weibull分布、Log-Normal分布和K分布等非瑞利分布。文献[21-23]针对通用参量CFAR检测算法在非瑞利分布时虚警概率显著增高的问题,先后提出了zlog(z)-CFAR、WL-CFAR(Weighted Likelihood-CFAR)和WHWH-CFAR(Weber Haykin Weber Haykin-CFAR)等专用参量CFAR检测算法。然而当杂波分布与假设的杂波模型不一致时,参量型CFAR检测器的性能会降低,此时需要用到非参量型CFAR检测技术。
非参量型CFAR检测处理将杂波数据转换为一个检测统计量后,与门限进行比较,判断目标是否存在。其检测性能不受杂波分布模型的影响,适用于模型未知的情况。但由于未充分利用杂波信息,恒虚警损失较大,特别是在较小的脉冲积累数时尤为严重,其检测性能通常低于参量型CFAR,一般应慎用。
基于单帧的CFAR检测算法对于空域上杂波强度变化剧烈,均匀性宽度较窄的地杂波,会随着参考单元数量减少导致恒虚警损失急剧增大。杂波图CFAR检测技术在时间上对多帧回波数据进行采样,估算杂波背景强度,形成杂波图,适用于地杂波中的恒虚警率检测。
1.2 现代雷达目标检测方法
现代雷达的空间分辨率和多普勒分辨率显著提升,回波信号更加复杂,承载的信息量更多。回波信号的复杂性导致对其统计建模的难度增加,传统的基于统计特性的检测方法应用受限。但回波信号中包含的丰富信息为基于特征的检测技术提供了有利条件。特征检测方法从模式分类的角度出发,提取回波信息中有用的特征,利用目标和干扰的特征差异性对两者予以区分,实现目标检测功能。特征检测技术的原理框图如图3所示,主要包括预处理、特征提取、分类器和检测判决四个部分。

图3 特征检测原理框图
预处理将回波信号由观测空间转换到特征空间,在特征空间中,目标和干扰在某个或某些特征上具有差异性。特征提取用于压缩预处理后的冗余信息,降低数据维度,并提取能够区分目标和干扰的特征。分类器根据提取的特征构建分类模型实现对目标和干扰的区分。检测判决依据分类结果,进行判决输出。在雷达目标检测中,为了提高检测性能,必须增加目标和干扰的可分性,即选择差异性较大的特征,构建区分度较高的分类模型。
1.2.1 检测特征的研究进展
早期的特征检测方法多采用单特征进行检测。但随着特征数量增加,单特征检测在性能上会有一定的损失,多特征联合检测是未来的研究方向。具有代表性的特征是分形特征、混沌特征、时频域特征以及极化特征等,如表1所示。
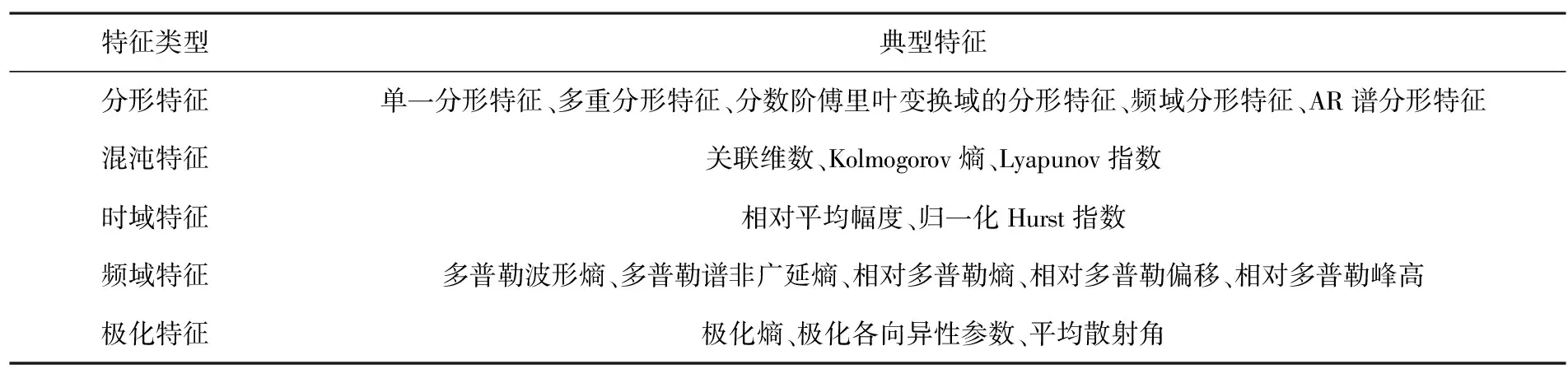
表1 特征检测方法的检测特征
1) 分形特征
Lo等[24]提出了基于单一分形维数的目标检测方法,开启了分形理论在雷达目标检测应用的先河。2006年,Hu等[25]基于多重分形理论,通过计算Hurst指数,对海杂波具有较好的检测效果。2009年,李宝等[26]发现海杂波在分数阶傅里叶变换域满足分形特性,并通过分数维差异最大值检测目标,在低信杂比下达到了较好的检测性能。随着分形理论的发展,频域的分形特性和AR(Auto Regressive)谱的分形特性也被引入目标检测中,均取得了良好的检测性能。
2) 混沌特征
1995年,Haykin教授首次提出了雷达海杂波具有混沌特性,并利用关联维数、Kolmogorov熵和Lyapunov指数等特征构建预测模型实现目标检测。何伍福等[27]利用IPIX雷达的实测数据,通过不同的预测模型,验证了基于混沌特征的目标检测算法的可行性。曾丽萍等[28]总结了近年来基于混沌预测的雷达目标检测方法的研究进展。唐建军等[29]近期的研究成果表明,在不破坏海杂波混沌特性的前提下,采用改进的蝙蝠算法优化混沌预测模型,可改善噪声的影响,提高检测效率。
3) 时域、频域特征
在时域和频域特征方面,戴舜等[30]在研究脉冲超宽带生命信号模型的基础上,以描述信号时间尺度的固有模态函数为特征,检测生命信号是否存在。刘劲等分析海杂波多普勒谱特性后,提出基于多普勒波形熵特征的检测算法。尹辉等[31]根据目标形状先验知识,提出以圆周剖面亮度曲线的中心频率为特征的飞机目标检测方法。陈世超等[32]根据目标和杂波多普勒谱的差异性,提出基于多普勒谱非广延熵的小目标检测方法。姜劲等通过相对多普勒熵、相对多普勒偏移和相对多普勒峰高等特征,构造了特征检测器。
4) 极化特征
在极化特征方面,Migliaccio等[33]在SAR(Synthetic Aperture Radar)雷达图像中提取极化熵、极化各向异性参数和平均散射角等三个特征,对海面溢油进行检测。Zhang等[34]对四极化SAR图像的特征进行分析后,提出基于一致性参数特征对墨西哥湾的浮油进行检测的方法。Shirvany[35]和Nunziata[36]先后利用SAR图像中的极化度特征,对海面溢油进行了检测。
5) 多特征联合检测
在多特征联合检测的研究方面,Shui等[37]将时域的相对平均幅度特征和频域的相对多普勒峰高和相对多普勒谱熵特征进行联合,开发出基于三特征融合的检测算法。时艳玲等[38]提取回波的平均功率和多普勒谱熵两个特征,提出基于非加性模型的特征联合检测方法。陈泽宗等[39]提取频域峭度、多普勒峰值、熵值三维特征,提出特征联合检测小目标算法。近两年,多域融合的特征数量逐渐增多。韩萍等[40]提出了将环境特征与散射特性进行融合的目标检测方法。夏鄂等[41]在时域和多普勒域提取基于全极化信息的六维特征,通过IPIX雷达数据集验证了六特征融合检测算法的检测效果。卢建等[42]从时域、频域和极化域提取八维特征,采用主成分分析法进行特征融合,提升了海面小目标的检测性能。罗彬珅等[43]基于时域、频域、小波域和双谱域提取47维特征,采用堆叠自编码器实现特征融合,构建了雷达新型干扰识别检测模型。
1.2.2 分类算法的研究进展
如图3所示,特征提取后,需要构建分类器对目标和干扰进行区分。分类算法主要有凸包学习、决策树、支持向量机和浅层神经网络等。
文献[38]提取两维特征进行零均值去相关处理生成归一化向量,运用凸包学习算法对漂浮小目标进行检测,达到了较好的检测效果。但凸包学习算法对于三维以上特征空间的计算复杂性增加,检测难度大。针对凸包学习算法的维数限制,文献[44-46]先后提出了基于决策树、支持向量机和K近邻的检测算法。上述算法是有监督的学习算法,过渡依赖于带标签的回波数据进行训练,灵活性较弱。文献[47]提出了一种半监督的基于标签传播的检测算法,只需要杂波数据集进行训练,适用性更强。针对样本规模不均衡等异常数据的情况,文献[48-49]先后利用最小最大概率机和支撑向量域描述两种单类分类器对机场跑道异物进行分层检测,获得了较好的检测性能。2020年,文献[50]将K-means聚类和单类支持向量机结合,设计了一种新的LOCSVM(Localized One Class Support Vector Machine)单类分类器,提高了短时观测下的检测性能。在无监督算法方面,文献[42]提出了基于孤立森林的检测算法,为海面小目标的异常检测提供了一种思路。
1943年,神经元模型诞生。20世纪90年代,计算机技术的进步促进了神经网络的应用。在模式分类领域,人工神经网络比其他人工智能技术具有更好的性能。文献[51-56]分别提出了基于六种神经网络的雷达目标检测方法。由于网络结构的输入层节点数没有限制,所以神经网络分类器可容纳的输入特征维数更多,检测结果更好。另外其检测速度得到了大幅提升,更加适应雷达目标实时检测的需求。
基于特征的目标检测技术,其分类结果的准确性很大程度上取决于输入特征的质量和分类器的鲁棒性。无论是凸包学习算法,还是决策树、支持向量机和浅层神经网络等机器学习算法,都无法回避特征提取的问题。上述算法中,大多数的输入特征都需要专家人工分析鉴别,从合适的特征域中选取差异性大的特征。随着雷达回波数据量和特征融合维数的增加,人工特征提取需要消耗大量的精力,工作效率较低。
2 深度学习目标检测算法
深度学习是一种深层神经网络,其利用多个隐含层对输入数据的特征进行学习,通过对目标和背景进行分类,实现目标检测功能。从本质上讲,深度学习目标检测方法是一种特征检测方法,也属于现代雷达目标检测方法。与机器学习方法相比,深度学习方法具有特征自动提取、分类准确度高、鲁棒性和泛化性强等优势。
2010年,斯坦福大学的李飞飞教授通过其团队制作的ImageNet图像数据库,开始主导ILSVRC竞赛。该比赛前两届的图像分类项目均采用了机器学习的方法。2012年,Hinton等构建的AlexNet模型将分类的准确率提高了9.4%,一举获得冠军,首次展示了深度学习技术的巨大潜能。2014年,Girshick等率先将R-CNN(Regions with Convolutional Neural Networks Features)模型应用到目标检测中,使深度学习目标检测算法得到了飞速发展。深度学习目标检测算法原理框图如图4所示,按检测原理划分成基于区域建议和基于回归两类。

图4 深度学习目标检测原理框图
2.1 基于区域建议的目标检测算法
基于区域建议的目标检测算法先通过选择性搜索方法确定候选区域,再使用深度学习方法对该区域进行特征提取和分类,检测流程需要两步,因此也称为两阶段检测算法。常见的算法有R-CNN、SPP-Net(Spatial Pyramid Pooling Network)[57]、Fast R-CNN[58]、Faster R-CNN[59]、R-FCN(Region-based Fully Convolutional Networks)[60]和FPN(Feature Pyramid Networks)[61]等。
R-CNN采用选择性搜索(selective search)的建议框提取方法,在图像中选取2 000个左右的建议框,将所有建议框调整为同一尺寸的图像,再输入到CNN模型中提取特征得到特征图,然后对每个类别使用SVM分类器对所有特征向量进行打分,得到所有建议框对应于每个类别的得分。随后,在每个类别上独立地对建议框使用贪心的非极大值抑制方法进行筛选,去掉IoU(Intersection over Union)大于特定阈值的分类打分较低的建议框,并采用边界回归方法对建议框的位置和大小进行微调,提高定位的准确性。R-CNN检测流程如图5所示。R-CNN虽然极大地提高了检测性能,但是在进行特征提取时,有2 000个左右的建议框需要进行大量重复的卷积计算,导致检测速度极慢。另外,CNN模型要求输入图像的尺寸固定,由于建议框的尺寸各异,在对其调整到固定尺寸时需要进行缩放、拉伸和裁剪等操作,会导致原图像出现不同程度的失真。
2014年,何凯明等提出了SPP-Net。该网络在产生建议框后只对原图进行一次全图特征提取,得到整幅图像的特征图,避免了卷积特征的重复计算,提高了算法的速度。SPP-Net引入了空间金字塔池化层,其将不同尺寸的输入固定为同一个尺寸的输出,解决了R-CNN需要调整建议框尺寸的问题,提升了网络的检测性能。SPP-Net检测流程如图6所示。SPP-Net虽然提高了检测速度,但训练仍然是多阶段的。SPP-Net仅微调了全连接层,未调整之前的所有层。微调不能在SPP层之前更新卷积层,影响了网络精度。
2015年,Girshick在R-CNN的基础上,设计了Fast R-CNN。后者开发了流线型的训练过程,能够同时训练Softmax分类器和边界框回归器。同时,其吸收了SPP-Net的思想,采用与SPP层类似的ROI(Region of Interest)池化层,为每个建议框提取长度固定的特征向量。这些特征向量输入到全连接层后,分为两个输出层,分别用于确定目标类别预测的Softmax概率和区域细化的特定类边界框回归偏移量。Fast R-CNN检测流程如图7所示。虽然Fast R-CNN结合了R-CNN和SPP-Net的优点,加快了检测过程,但其仍受到提案检测[62]的影响,检测速度受限。

图5 R-CNN检测流程
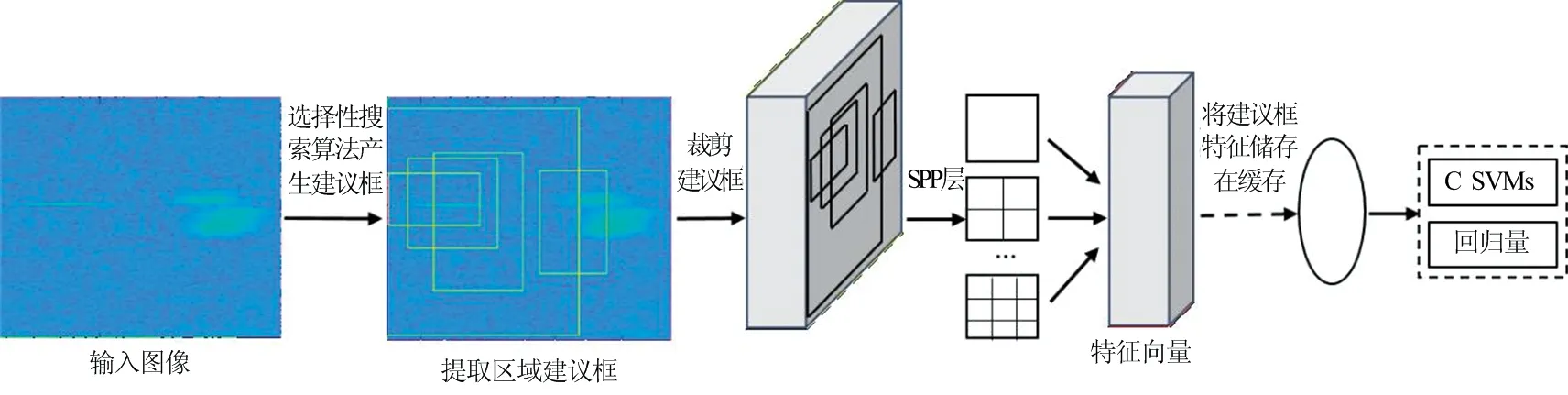
图6 SPP-Net检测流程
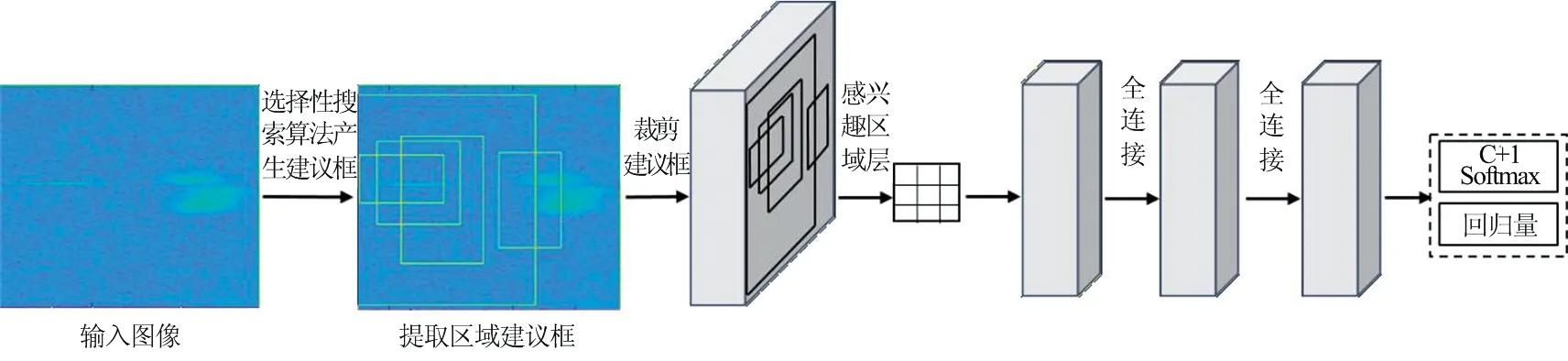
图7 Fast R-CNN检测流程
2015年,Ren、He和Girshick等又提出了Faster R-CNN。由于CNN在卷积层中比在全连接层中有很好的目标定位能力,因此可用CNN代替选择性搜索。Faster R-CNN引入候选区域网络(Region Proposal Network,RPN),将提取目标建议框的步骤融入到深度网络中,直接产生候选区域,检测速度大幅提高。Faster R-CNN检测流程如图8所示。虽然Faster R-CNN突破了Fast R-CNN的速度瓶颈,但检测阶段仍存在冗余计算,无法实时检测目标。
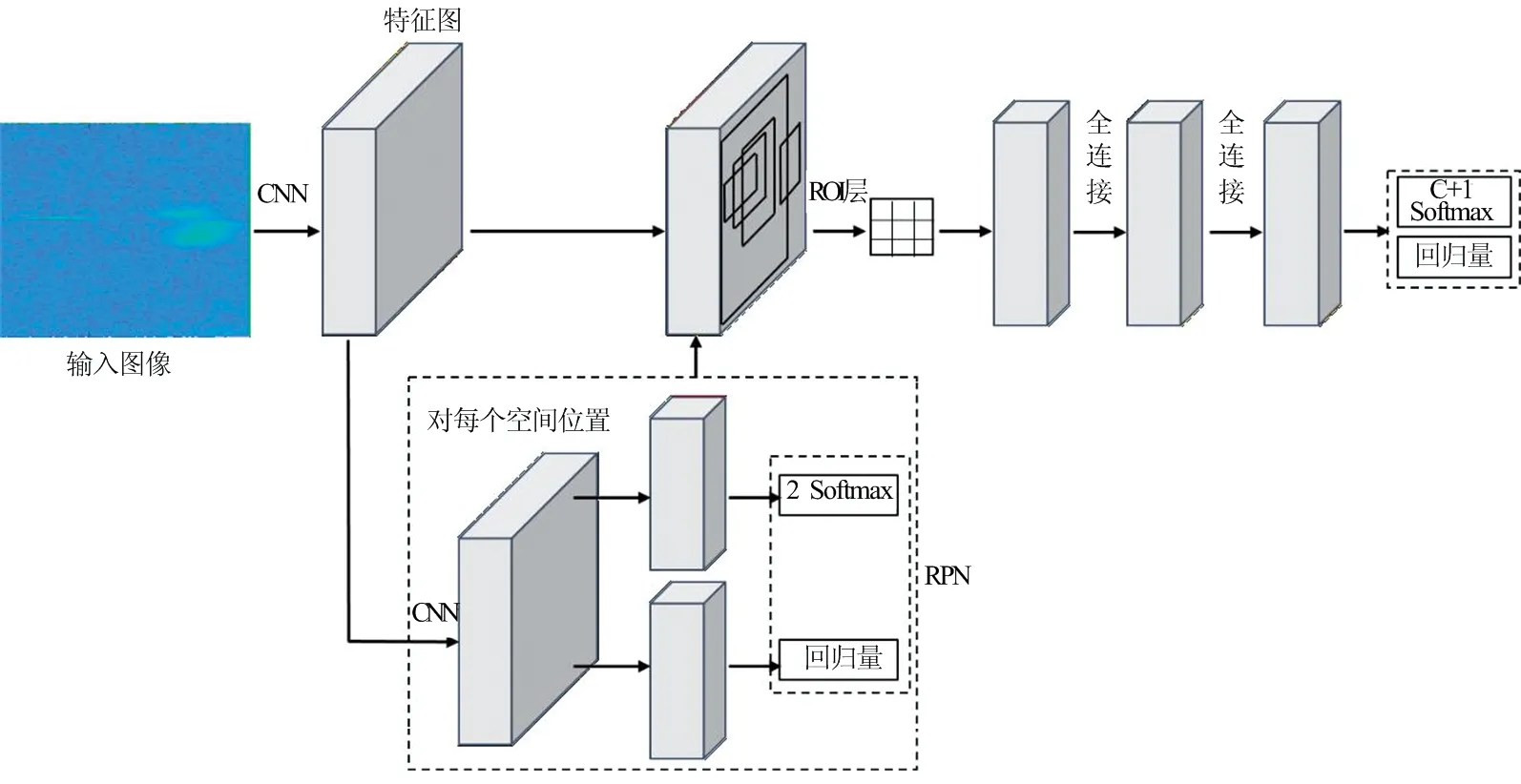
图8 Faster R-CNN检测流程
2016年,Dai等对Faster R-CNN进行了改进,提出了基于区域的全卷积网络(R-FCN)。R-FCN针对Faster R-CNN对每个ROI进行大量计算的问题,提出了位置敏感分数图,避免了图像分类时平移不变性和目标检测时平移可变性的冲突,实现了所有的计算在整幅图像上共享。
2017年,Lin等对Faster R-CNN进行了改进,构建了FPN。FPN之前的大多数深度学习检测算法对图像底层的特征利用不充分。FPN具有横向连接的自上而下的设计结构。CNN通过它的正向传播,形成特征金字塔。因此FPN的预测在各特征层单独实施,吸收了各层不同尺度的特征,可以检测各种尺寸的目标。
2.2 基于回归的目标检测算法
虽然基于区域建议的目标检测算法的检测性能比较高,但其检测速度无法满足实时检测的要求。针对此问题,研究人员提出了基于回归的目标检测算法。基于回归的目标检测算法将目标检测视为回归问题,没有单独的建议框筛选阶段,而是直接回归目标的分类概率和位置坐标,检测过程一步到位,也称为单阶段检测算法。此类算法采取端到端的检测,只进行一次前馈网络计算,检测速度得到了大幅提高。具有代表性的算法是YOLO(You Only Look Once)[63]、SSD(Single Shot Detector)[64]、Retina-Net[65]、RFB-Net(Receptive Field Block Network)[66]、FCOS(Fully Convolutional One-Stage)[67]等。
2015年,Joseph等提出了首个单阶段检测算法YOLO。YOLO算法将原始图像划分成网格,每个单元格预测目标的类别概率、边界框的位置和置信度。由于没有建议框生成步骤,YOLO更加轻量化,检测速度更快。但同时也导致目标位置精度降低,尤其是小目标的检测性能显著下降。为了解决这个问题,Joseph等又陆续提出了YOLO v2、YOLO v3、YOLO v4和YOLO v5等版本。YOLO检测流程如图9所示。
2015年,Liu等在借鉴了YOLO快速检测思想和RPN的优点后,提出了SSD算法。SSD不再只使用顶层特征图进行检测,而是引入了多尺度特征图的检测策略,综合多个卷积层的检测结果对不同尺寸目标进行检测。SSD检测流程如图10所示。
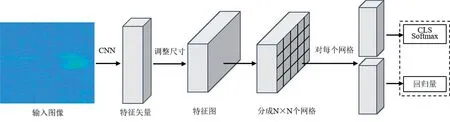
图9 YOLO检测流程

图10 SSD检测流程
2017年,Lin等认为单阶段检测算法精度低的原因在于检测器训练时存在正负样本不平衡的现象,提出了Retina-Net算法。Retina-Net算法引入了焦点损失函数,通过对交叉熵损失加上权重,使检测器训练时更关注难分类的样本。焦点损失的引入,使得单阶段检测算法既保持了速度优势又达到了两阶段检测的精度。Retina-Net检测流程如图11所示。
2018年,Liu等在SSD模型的基础上加入感受野模块(receptive field block)提出了RFB-Net算法。该算法采用VGG16作为特征提取网络,被提取的特征经过RFB后产生不同尺度的特征图,利用多尺度特征融合思想进行分类回归,检测精度得到进一步提高。
2019年,Tian等提出了全卷积单阶段(fully convolutional one-stage)检测算法。该算法采用逐像素点预测的思路,使用FPN多级预测和中心点预测策略增强目标检测效果。与基于区域建议的算法和其他基于回归的算法相比,FCOS算法无需预先设定锚框(anchor boxes),而是由模型自己回归出来。因此,FCOS算法的设计参数和占用内存大幅减少,检测精度得到提高。
2.3 检测算法特点比较
上述主要算法的特点如表2所示。通过分析两类深度学习目标检测算法的特点可知,与单阶段的基于回归的目标检测算法相比,两阶段的基于区域建议的目标检测算法对输入图像的尺寸要求更低,但需要生成建议框,导致检测速度更慢。
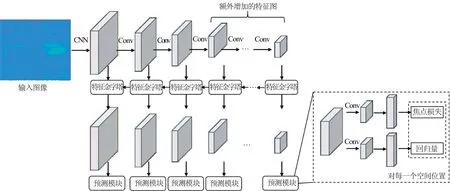
图11 Retina-Net检测流程
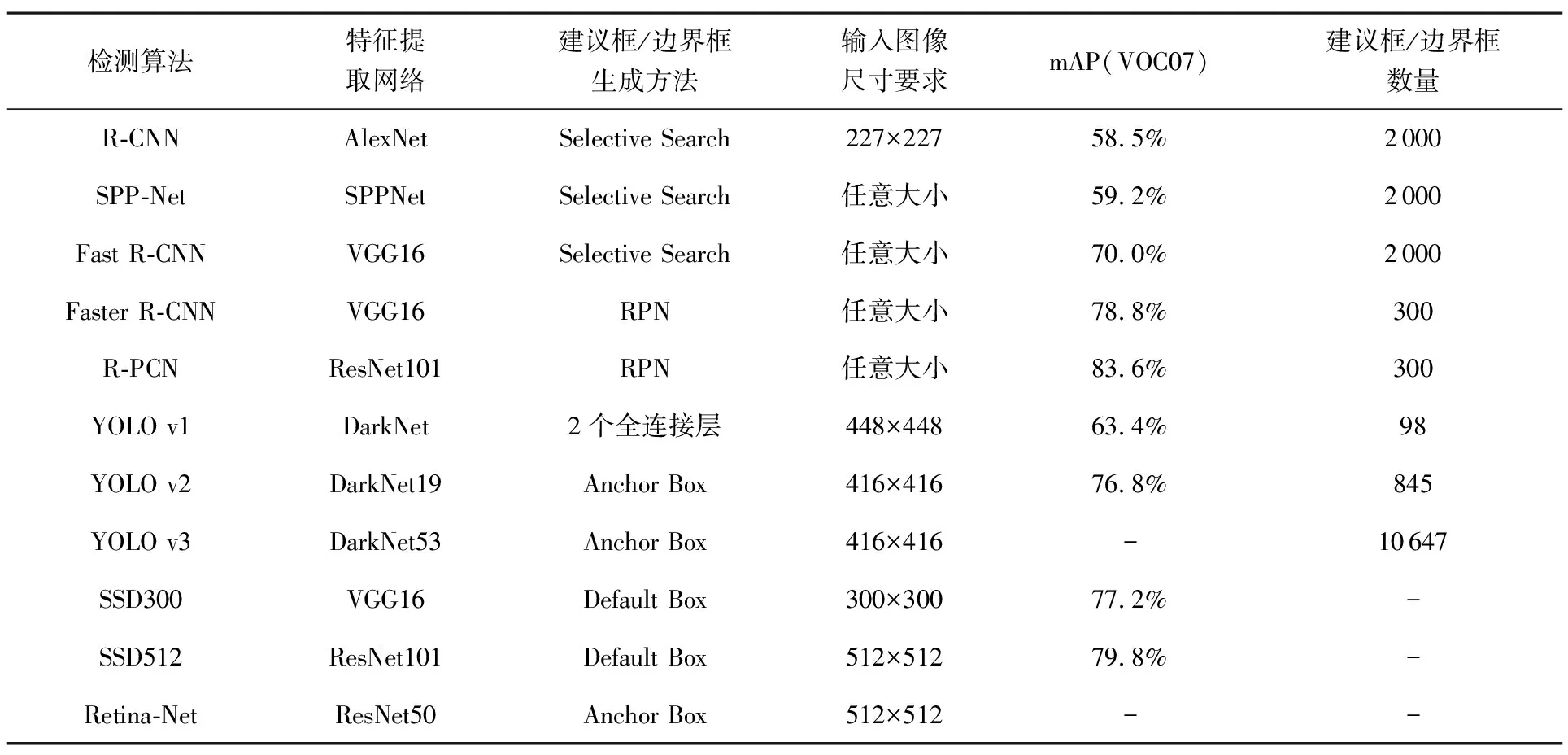
表2 目标检测算法特点
3 深度学习雷达目标检测应用
随着计算机硬件处理能力和雷达分辨率的提高,基于深度学习的雷达目标检测技术得到了广泛应用。在应用对象上主要是高分辨雷达的一维序列数据和二维雷达图像数据。在应用场景上主要有复杂背景下的目标检测、弱小目标检测和小样本检测。
3.1 雷达回波数据上的检测
由于不同雷达的信号处理方法和成像原理有差别,雷达接收回波信号后可获取不同形式的雷达回波数据,如一维的高分辨距离像(High Range Resolution Profiles,HRRP)以及二维的距离多普勒(Range-Doppler,R-D)谱图、微多普勒(Micro-Doppler,M-D)谱图和SAR图像等。
3.1.1 雷达一维序列信号检测
2019年,Liu等[68]在构建回波信号的时域回波幅度和频域谱幅度数据集的基础上,采用LeNet卷积神经网络设计分类模型,对噪声和杂波进行分类识别,为基于雷达一维序列信号在噪声和杂波中的目标检测奠定了良好的基础。苏宁远等[69]通过建立海杂波和目标的一维距离像数据集,从预测和分类两种角度出发,分别采用长短时记忆网络和卷积神经网络设计检测模型。通过实测数据验证了两种方法在雷达一维序列信号中检测目标的可行性,同时发现CNN分类方法检测的实时性更好。
雷达回波信号在时域上可看作时间序列信号,反映了回波幅度随时间的变化。一般情况下,目标信号比杂波信号的强度高,回波幅度大。可根据目标与杂波在回波幅度上的差异性进行目标检测。但由于雷达一维序列信号仅利用了回波信号的幅度信息,检测性能有限。因此,针对雷达一维序列信号采用深度学习方法进行目标检测的研究相对较少。
3.1.2 雷达二维图像数据检测
相比于雷达一维序列信号,雷达二维图像的数据来源更加丰富,研究成果更多。
1) R-D谱图检测
雷达回波信号在快时间域经过快速傅里叶变换后得到距离维信息,再对各距离单元进行慢时间域傅里叶变换后得到回波的R-D谱图,即回波在距离-多普勒域的能量分布。可利用目标和干扰在R-D谱图上的能量差异进行检测。
Perez等[70]构建了激光雷达R-D图像数据集,设计了YOLO v3单阶段目标检测网络,对行人和车辆目标具有较好的检测性能。Wang等[71]构建脉冲多普勒雷达的R-D图像数据集,提出了一种CNN的检测模型,对无人机目标能够准确地检测定位,检测性能高于CFAR检测方法;张暄等[72]以R-D图像为数据集,设计了Faster R-CNN的雷达目标检测模型,将目标检测问题转化为目标与背景的二分类问题,通过实验证实了所提深度学习目标检测算法的检测率升高的同时,虚警率大大降低,解决了传统CFAR检测算法检测率与虚警率之间的矛盾。宋海凌等[73]受到可见光数据域目标检测方法的启示,在雷达回波信号的R-D图像数据集基础上设计了特征金字塔目标检测网络,使得检测模型能够利用不同尺度的特征检测目标,达到了较好的检测效果。
2) M-D谱图检测
根据多普勒效应,目标相对于雷达做匀变速运动时,其回波信号为线性调频信号。利用时频分析工具将雷达回波信号变换为二维的雷达时频图,根据目标的微动特征在图像中进行目标检测。
海军航空大学的陈小龙团队[74]在对回波信号进行时频分析后,建立了时频图数据集,先后采用LeNet、AlexNet和GoogLeNet三种卷积神经网络模型检测机动目标,证实了深度学习目标检测方法的检测效果优于传统的动目标检测方法和基于支持向量机的目标检测方法。南京信息工程大学的施赛楠等[75]采用SPWVD(Smoothed Pseudo Wigner Ville Distribution)时频分析工具将一维回波信号变换为二维时频图,在纯杂波中加入仿真目标,克服样本数量不均衡的难题,构建了半仿真时频图数据集,在GoogLeNet的Inception v3网络中引入迁移学习模型,对海面目标进行自主检测,消除了人工提取特征的局限性。Kim等[76]利用多普勒雷达对人、狗、马和汽车进行探测,对获得的雷达回波信号进行短时傅里叶变换得到时频图数据集,设计DCNN检测模型对人体目标进行检测,达到了97.6%的检测率。
3) SAR图像检测
SAR作为一种主动探测式雷达,能够获取目标的二维图像,且不受天气、光照等因素的限制,可全天时、全天候监测目标[77]。近几年,深度学习方法在SAR图像目标检测中得到了广泛的关注。
2017年,Kang等[78]提出了由RPN和上下文特征检测网络组成的多层融合CNN,该网络融合了深度语义特征和浅层高分辨率特征,对小型舰船具有较好的检测性能。2018年,Jiao等[79]针对多尺度、多场景SAR舰船检测问题,在Faster R-CNN框架下设计了密集连接多尺度神经网络。2019年,夏勇等[80]构建了Faster R-CNN网络模型,借鉴迁移学习思想,利用光学图像对模型开展预训练,保存模型参数后利用SAR图像数据集对模型进行再训练,通过实验证明训练好的模型检测效果和速度均有可观的改善。同年,梁怿清等[81]针对光学图像检测算法在SAR图像检测上不适用的问题,对YOLO v3进行改进,提出了SAR-YOLO-960检测算法。将输入图像扩展到960×960像素,修改YOLO v3网络结构并改进损失函数,在自制的SAR图像数据集上检测效果明显增强。2020年,Zhou等[82]针对大规模网络难以部署在现役雷达装备的问题,提出了一种轻量级的Lira-YOLO模型,该模型参数少,结构简单,检测性能较好,适用于移动设备。苏娟等[83]基于SSD算法,提出了改进单步多框检测算法,通过迁移学习和浅层特征增强方法,提高了SAR图像小目标的检测性能。2021年,陈冬等[84]、李宝奇等[85]、岳冰莹等[86]和阮晨等[87]分别对YOLO v3、SSD、Retina-Net和FCOS四种深度学习目标检测算法进行了改进,通过SSDD数据集证实了改进后的算法具有更好的效果。
受上述研究成果的启发,本课题组也针对雷达二维图像开展了深度学习目标检测的研究。利用某型航管雷达在宽带模式下形成的方位-距离二维图像,分别运用了基于区域建议和基于回归的两类深度学习算法对飞机目标进行检测。前者以Faster R-CNN为例,后者以YOLO v3为例,两种算法的检测效果如图12所示。图12中横向为方位向,纵向为距离向,两种深度学习目标检测算法均能够准确地检测出飞机目标的真实位置。经过统计,在该型航管雷达图像数据制作的数据集上,Faster R-CNN算法的平均准确率为83.87%,YOLO v3算法的平均准确率为90.32%,两者均达到了较好的目标检测效果。但Faster R-CNN对单张图像的检测时间比YOLO v3高一个数量级,前者约为1.35 s,后者约为0.14 s。

(a) Faster R-CNN检测效果
(b) YOLO v3检测效果图12 两种算法检测效果
3.2 雷达特殊场景下的检测
随着深度学习目标检测技术的发展,利用大量雷达图像数据对简单场景下常规目标进行检测的效果不断提升,但针对特殊场景,如复杂背景下、弱小目标和小样本等的检测存在漏检率和虚警率高的问题。主要原因是复杂背景下杂波散射强度较高、杂波背景非均匀,对面积小、散射强度弱的弱小目标检测时会受到强杂波的干扰。另外,小样本的数据集无法使深度学习网络得到充分的训练,导致检测模型精度较低。针对特殊的应用场景下的检测,需要采取相应的措施。
3.2.1 复杂背景下的检测
文献[88]针对复杂交通场景下的车辆目标检测难题,采用Faster R-CNN目标检测算法,通过自制数据集证实了该算法比传统机器学习检测方法的精度和速度显著提升。文献[89]针对复杂气象条件下行人目标检测存在漏检和虚警的问题,首先对质量不佳的图片采用暗通道去雾算法进行增强处理,然后在YOLO v3网络的基础上,加入密集连接模块和膨胀卷积增大感受野,提出YOLO v3_dense算法,得到了更好的检测效果。文献[90]针对复杂背景下SAR图像近岸舰船目标检测效果差的问题,在YOLO v5算法中改用可变形卷积提高特征提取能力,采用级联和并列金字塔进行特征融合,使用空洞卷积增加感受野,提出了DFF-YOLO v5(Deformable Feature Fusion-YOLO v5)算法,对近岸舰船目标数据集达到了85.99%的检测率。文献[91]针对复杂环境大场景SAR图像飞机目标检测效率低的问题,简化了检测流程,引入基于灰度特征的机场区域精细化提取模块,利用YOLO v3网络对飞机目标检测的效率明显提高。
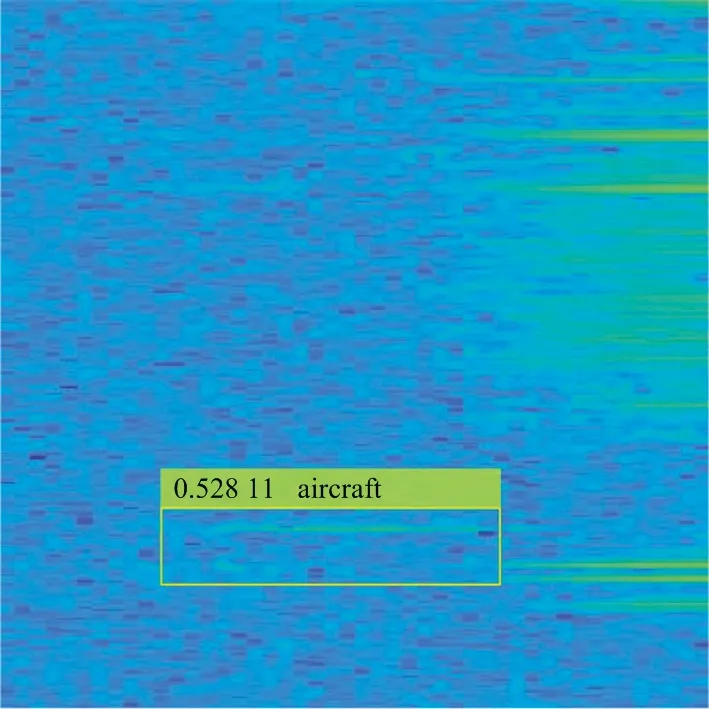
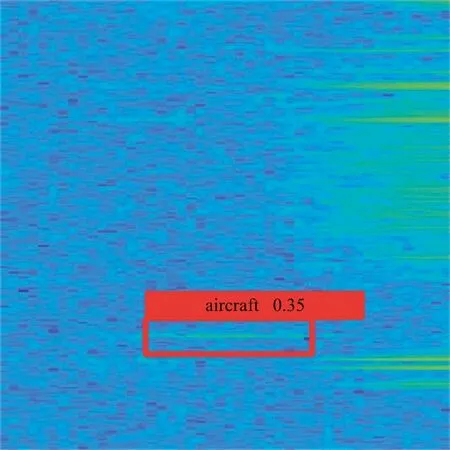
本课题组利用Faster R-CNN和YOLO v3两种深度学习雷达目标检测方法对复杂背景下的飞机目标进行检测,检测时改进两种算法的特征提取网络从而获得能够区分目标和杂波的更深层次的图像特征,检测结果如图13所示。图13中,飞机目标处于杂波区附近,且目标与杂波的外形较为相似,仅凭肉眼很难区分,但改进后的深度学习目标检测方法能够检测出飞机目标的真实位置,在杂波背景下同样具有较高的检测效果。
(a) Faster R-CNN检测效果
(b) YOLO v3检测效果图13 两种算法复杂背景下检测效果
3.2.2 弱小目标的检测
文献[92]针对机载雷达对海面小型船舶检测效果不佳的问题,提出了基于卷积神经网络的目标检测方法,对小型船舶的检测率超过90%。文献[93]针对海杂波下小目标检测困难的问题,在滤波器设计、数据增强和非极大值抑制方面对Tiny-YOLO v2算法进行了改进,在雷达时频图数据集上对小目标具有较好的检测效果。文献[94-95]针对SAR图像远海弱小目标检测难题,分别对Faster R-CNN和SSD两种模型的特征提取模块进行改进,提出了改进的Faster R-CNN和特征增强的SSD算法,增强了小目标的发现能力。文献[96]提出了有效增强感受野的轻量化检测算法,利用ShuffleNetV2特征提取网络减小模型尺寸,采用改进的SPP模块增强感受野,加入SAM模块提高目标定位能力,改进PAN(Path Aggregation Network)网络进行特征融合,对复杂环境下的小目标具有出色的检测性能。文献[97]针对侧扫声呐对海底小目标检测性能低的问题,引入特征融合模块、融入注意力机制,采用WBF(Weighted Boxes Fusion)提升定位精度和置信度,将DETR(End-to-End Object Detection with Transformers)与YOLO v5融合,提出了DETR-YOLO的轻量型目标检测模型,提高了小目标的检测能力。文献[98]为了提升无人艇对水面小目标的检测能力,提出了改进SSD目标检测算法,对小目标的检测率提高了20%。

(a) Faster R-CNN检测效果
(b) YOLO v3检测效果图14 两种算法对弱小目标检测效果
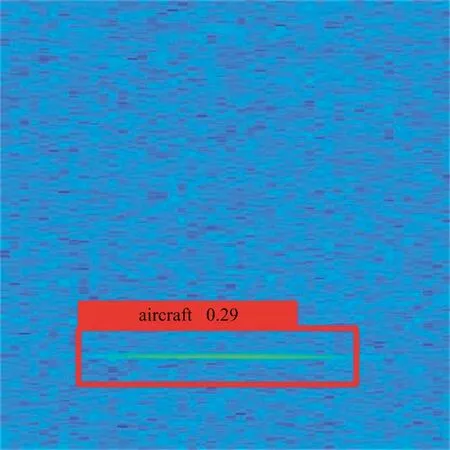
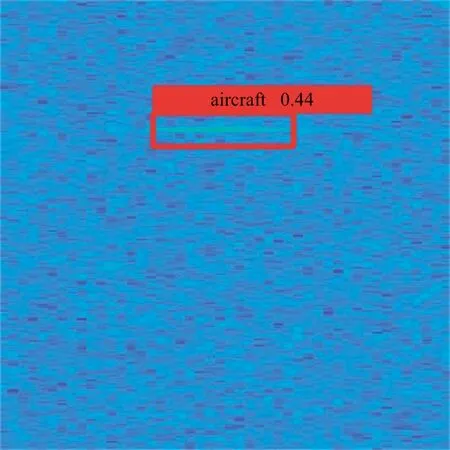
本课题组采用Faster R-CNN和YOLO v3检测航管雷达弱小目标时对算法进行改进,通过增加雷达原始图像的放大倍数来获得更加清晰的训练样本,修改两类算法的特征提取网络结构以便提取更深层次的图像特征。改进后的算法对接近该型航管雷达探测威力极限的150 km处小型飞机目标仍然能够较好地检测出来,检测效果如图14所示,说明两种深度学习雷达目标检测方法具有较好的弱小目标检测能力。
3.2.3 小样本检测
近五年,深度学习雷达目标检测技术取得了显著成效,产生了众多性能优越的检测模型,但这些模型的训练需要大量带有标签的样本。雷达实际工作时,很难获得大规模高质量的带标签样本,导致模型推广受限。小样本学习可在少量带标签样本的情况下,使模型得到很好的训练,降低了对样本数据规模的要求。受小样本学习的启发,小样本雷达目标检测技术是当前的研究热点。
文献[99]提出了元学习算法,在模型学习到元特征后,通过少量训练样本可使检测模型得到良好的泛化性能。文献[100]在YOLO v3模型中引入元学习算法,提高了SAR图像舰船目标小样本检测的性能。文献[101]针对高频地波雷达数据量不大的情况,采用微调的方法,先对Fast R-CNN模型进行预训练,再微调RPN模块,利用Faster R-CNN模型提高了小样本检测效果。文献[102]针对SAR图像训练样本较少的问题,基于FCN-8网络模型,引入迁移学习方法,利用Pascal VOC数据集上训练好的网络参数对SAR图像检测模型进行训练,在MSTAR数据集上获得了较好的检测性能。
本课题组采用迁移学习的思想,在运用Faster R-CNN和YOLO v3进行深度学习雷达目标检测时,对在VOC2007数据集上已预训练好的模型进行再训练,在168张航管雷达图像作为训练样本的情况下,达到了80%以上的平均准确率,该方法对小样本检测具有一定的适用性。
4 深度学习雷达目标检测技术面临的挑战和发展趋势
随着深度学习技术的逐渐成熟,对雷达回波图像数据进行深度学习目标检测取得了较好的效果。但是深度学习技术也面临着理论和工程上的挑战。在理论方面,深度学习检测技术的可分析性和可解释性较差。目前,深度神经网络中参数的确定无法进行定量的分析,只能通过实验结果的好坏来确定,各参数的设置依据和原理尚不知晓。在工程方面,深度学习技术依赖于大量的训练样本和大规模的并行计算。目前,带标签的雷达图像数据集的质量和数量有限,大多都是研究者自行采集、制作的数据集,通用性较差。另外,深度学习模型的训练需要高速计算平台,对硬件的要求较高。
为了提高检测的可信度和效率,深度学习雷达目标检测技术下一步的发展趋势可以在以下几个方面展开:
1) 弱监督或无监督目标检测。在大数据时代,获得含有雷达目标和干扰的图像数据不是难事,但对图像数据进行分类标注需要专业的人员花费大量的时间和精力,效率低下。开发轻度依赖甚至不依赖带标签数据的目标检测算法非常必要,弱监督或无监督目标检测是未来的发展趋势。
2) 三维目标检测。与二维的雷达图像数据相比,三维雷达数据可展现更多的信息,提取更多的特征,更好地区分雷达目标和干扰。激光雷达点云能够提供深度信息,将其与二维雷达图像数据进行叠加,开展三维目标检测是一个新的研究方向。
3) 多元特征融合检测。机器学习目标检测技术需要人工提取特征,特征维数通常较少。深度学习目标检测技术可以自动提取特征。两种特征提取方法的机理不同,提取的特征各异。可将机器学习检测技术与深度学习检测技术进行融合,提高特征的维度。
4) 开发新的深度学习网络。深度学习目标检测技术需要大量数据驱动,生成对抗网络可以根据有限的样本,生成大量的虚拟样本,提高数据集的完备性,使目标检测模型得到充分的训练,提高泛化能力。
5 结束语
深度学习技术能够自动提取雷达回波数据中的特征,快速准确地区分目标和干扰,在雷达目标自动检测领域具有广阔的应用前景。本文从统计检测方法和特征检测方法入手,分析了传统雷达目标检测方法的特点和不足,对深度学习目标检测方法的原理进行了介绍,梳理了两类深度学习目标检测算法的发展历程和特点,总结了深度学习雷达目标检测的应用现状,并结合雷达回波数据的特点,对未来的发展方向进行了展望。
