旱地玉米残膜捡拾清茬机设计与优化
2023-01-08王建吉帅忠奎李明明
王建吉,帅忠奎,李明明
(1.陇东学院机械工程学院,甘肃 庆阳 745000;2.庆阳市前进机械制造有限公司,甘肃 庆阳 745000;3.庆阳质量检验检测研究院,甘肃 庆阳 745000)
地膜覆盖技术能够起到保熵增产的效果,尤其在西北,该技术得到广泛推广。但近年来由于废膜捡拾问题,造成一些地方地膜应用受阻。当前废膜捡拾大多采用半机械化捡拾,捡拾效率和应用效果不佳,因不同农作物的生长特点、种植工艺不同,使得通用化废膜捡拾机械研制技术进入瓶颈。尤其对于玉米、烟草等根茬较大的农作物废膜捡拾机械研制难度更大。
现有的废膜捡拾机大致分为滚筒式、弹齿式、耙齿式、链齿式,杆齿式、气吸式6种基本类型,为了提高废膜捡拾率和降低缠膜率,科研人员针对现有的几种类型废膜捡拾机做了大量的理论和试验研究。王旭峰等[1]设计了一种刨膜和抛膜机构,然后采用链齿式捡膜机构将废膜收集起来。张嘉喜等[2]通过滚刀式起茬降低了青贮玉米地根茬对残膜回收的影响。刘进宝等[3]针对棉花地残膜设计了一种残膜捡拾压缩车,提高了残膜回收机械化效率。戴飞等[4-5]根据种植农艺要求,结合地形结构、起膜深度等因素,设计了一种全膜双垄沟残膜捡拾机。李亚丽等[6-7]针对弹齿式结构的卸膜机构设计了一种锥形卷膜辊,该结构虽然卸膜相对容易,但卷膜辊和捡膜齿的连接可靠性低。谢建华等[8-13]对弧齿式回收机的关键参数进行了优化。由佳翰等[14-15]设计了一种铲齿组合式捡拾机,以及其他国内研究人员针对残膜捡拾的过程参数进行了优化,但是大部分研究对象是棉花地残膜捡拾[16-25],针对玉米地残膜捡拾机研究较少,关于玉米根茬清理方面更少[26-30]。本研究针对滚筒式废膜捡拾机膜土不分离、杆齿式卸膜困难、弹齿式遇到玉米根茬无法弹起,以及玉米根茬残留土壤影响农机具寿命等问题。在杆齿式结构的基础上,增加破茬机构、割膜机构、清茬收集机构,研制出一种适用于玉米地的废膜捡拾清茬机,并对其整机性能和工作可靠性进行了试验研究。
1 整机机构分析
1.1 整机结构及工作过程
整机主要由深松机构、传动系统、圆盘刀破茬机构、梳齿式起膜机构、钉齿式捡膜机构、电动割膜装置、铲茬装置、链板式输送装置、集茬装置等组成。
玉米地残膜捡拾清茬机可一次性完成破茬-起膜-捡膜-割膜-铲茬-集茬等工作。动力传动如图1所示,过程如下:拖拉机输出动力,通过减速换向器带动主动轴转动,主动轴利用带传动2带动捡膜轴转动,实现捡膜,捡膜轴通过带传动3带动破茬刀轴工作。同时主动轴利用带传动1带动过渡轴转动,过渡轴和主动齿轮同轴,从动齿轮和传送链板轴同轴。利用齿轮传动目的是实现换向,使得传动链板转向和捡膜轴转向相反。

图1 传动系统示意图Figure 1 Schematic diagram of transmission system
整机结构如图2所示,工作过程如下:破茬装置是利用破茬刀高速旋转,刀刃将玉米根茬劈开,破茬刀架间距可根据玉米种植工艺要求调节。深松工作的目的是将垄两侧板结的土壤疏松,便于侧膜捡拾。起膜机构布置在破茬装置后面,目的是将废膜挑起后与地面分离,便于捡膜齿工作。捡膜装置是利用捡膜齿将浮在地表的残膜,通过高速旋转将废膜拾起后缠绕在卷膜辊上,卷膜辊在旋转过程中,将残膜上的土甩出,起到了膜土分离的效果。待卷膜辊上的残膜缠绕到一定厚度时,停机,转动卷膜辊,使得卷膜辊上的凹槽与割膜刀片对齐,启动割膜刀片驱动电机和丝杠电机,将缠绕在卷膜辊上的废膜沿周向割开,再利用卷膜辊上的连杆机构将废膜推出,完成卸膜。清茬部分是由铲茬装置、链板式输送装置、集茬装置组成,铲茬装置主要依靠铲茬刀将根茬铲起,通过拨茬机构将根茬和杂物转移到传动链板上,链板上加装抖动装置,在链板输送过程中将混合在根茬和杂物中的土壤抖落在地面上,最后根茬和杂物进入集茬箱。同时将捡膜齿捡不到的废膜和根茬一起收集,起到清茬清废膜的作用。

图2 一种玉米地残膜捡拾清茬机结构示意图Figure 2 Structure diagram of corn residue picking and stubble cleaning machine
1.2 整机参数
考虑玉米种植农艺要求和当地地形结构、土壤参数等因素,设计样机轮廓尺寸、确定机具工作时的基本参数,详细如表1所示。

表1 玉米地残膜捡拾清茬机基本参数Table 1 The essential parameter of the residual film pickup machine
2 关键结构设计
废膜捡拾机核心部件包括:深松机构、破茬机构、起膜机构、捡膜机构、卸膜机构、铲茬集茬机构等,各部分的几何尺寸对整机的可靠性和捡拾效果均有影响。
2.1 起膜齿结构设计
起膜机构由起膜轴和起膜齿组成,其中的关键零件就是起膜齿,因为地膜长期裸露在地表,部分和土壤粘连在一起,还有一部分被板结的土壤压实,捡膜齿无法直接将其卷起,因此先利用起膜齿伸入土壤,将土壤和地膜疏松,使地膜浮于土壤之上,起膜齿安装在起膜轴,整个起膜机构增加了仿地形的结构,由于地面不平整,起膜齿尖所受的工作阻力不是常数,为了设计合理的起膜齿结构,工作阻力是一个关键参数,受力分析如图3所示,为适应不同硬度的土壤,可调节起膜齿入土角,入土角影响入土深度,入土深度影响工作阻力,工作阻力的计算可根据文献[7]方法计算。

图3 起膜齿受力分析Figure 3 The force analysis of the membrane tooth

式中:FC为起膜齿工作阻力,N;G为起膜齿上土壤与地膜的质量,kg;C为土壤内聚力系数;A为土壤剪切面积,mm2;Ft为土壤沿起膜齿面运动的驱动力,N;σt为铲面倾角,°;ft为土壤内摩擦因数;λt为土壤与金属附着力参数;f为土壤内摩擦因数;αt为入土角,取值在18°~20°。
2.2 捡拾机构设计
捡膜机构由带轮、套筒、捡膜齿、捡膜轴组成,通过带传动系统带动捡膜轴转动,捡膜轴上的捡膜齿转动利用离心力将地表的废膜捡拾缠绕在捡膜轴上,为了减少捡膜齿与地面的接触次数,避免捡膜齿将废膜划破无法缠绕在轴上,通过测试试验确定了捡膜齿的排数和齿的数量。本机构采用单排齿,齿数为11个,如图4所示。

图4 捡膜机构组成和捡膜齿受力分析Figure 3 Composition of film picking mechanism and force analysis of film picking teeth
捡膜机构设计必须满足两个基本条件,一是保证残膜在缠绕过程中不滑落,残膜缠绕在捡膜轴上;二是保证残膜不被捡膜齿戳破;捡膜齿受力分析如图4所示[14]。
(1)确保残膜在捡拾过程中不从捡膜齿上滑落,要求残膜在捡膜齿上的摩擦力要大于残膜在捡膜齿上的离心力,即需满足以下条件:

式中:μ为捡膜齿与膜之间的摩擦因数;m总为捡膜齿端部接触土壤和废膜混合质量,kg;FG为土壤对捡膜齿的工作阻力,N;m1、m2分别是m总在捡膜齿齿向和垂直方向的分量(如图4所示);α1为m总和m1的夹角,rad;α2为FG和m2的夹角,rad;ω为捡膜轴角速度,rad/s;ρ为土壤密度,gg/cm3,g为重力加速度,m/s2。
(2)为保证地膜在捡拾过程中不被拉成条状,齿对地膜的作用力还必须满足地膜的抗拉强度,即

式中:rs为捡膜齿尖顶瞬时回转半径;A为捡膜齿作用在地膜上的横截面面积;[σ]为废膜的许用拉应力。
根据式(2)和(4)可得到捡膜轴的工作角速度取值范围:

式中:rs为拉膜齿尖顶瞬时回转半径,mm;A为拉膜齿作用在地膜上的横截面积,mm2;[]σ为废膜的许用拉应力,N。
2.3 卸膜机构设计
卸膜机构由丝杠组件、动力部分、切割组件等组成,采用钉齿式捡膜机构,捡拾的废膜含杂率低且易回收利用,但在捡拾过程中,卸膜成为一个难题,因为废膜高速缠绕在捡膜辊上,卸膜难度大,费时费力,本设计增加卸膜装置,成功解决卸膜难的问题,如图5所示。

图5 卸膜机构Figure 5 Unloading mechanism
工作过程为:在捡膜轴上先开设割膜槽,当捡膜轴上的废膜缠绕到一定厚度时,传动系统停机。手动旋转捡膜辊,使得捡膜辊上的槽与刀片位置对准后,打开卸膜机构动力开关,步进电机带动丝杆转动,割膜组件沿丝杠上移动,同时割膜组件上的直流电机带动切片转动,实现边移动边切膜,割膜组件到达丝杠另一端后完成切膜,后迅速复位。缠绕在捡膜轴上的废膜自动脱落。
2.4 清茬机构
陇东地区玉米收获后要将玉米根茬人工挖掘清理,避免在二次种植时种子播种不均匀,以及根茬极有可能对农机具产生破坏作用。玉米地残膜捡拾清茬机中清茬机构的作用有两个,一是将玉米根茬清理并收集,另外一个作用是将捡膜机构遗漏的残膜清理干净,增加废膜拾净率。也减轻了农户的工作强度。清茬机构由铲茬刀和输送链板组成,采用链板输送的主要原因是,是在输送过程中可以将根茬上的土通过链板抖动将其重新洒落在地表。根茬和土块混合物受力分析如图6所示[21]。
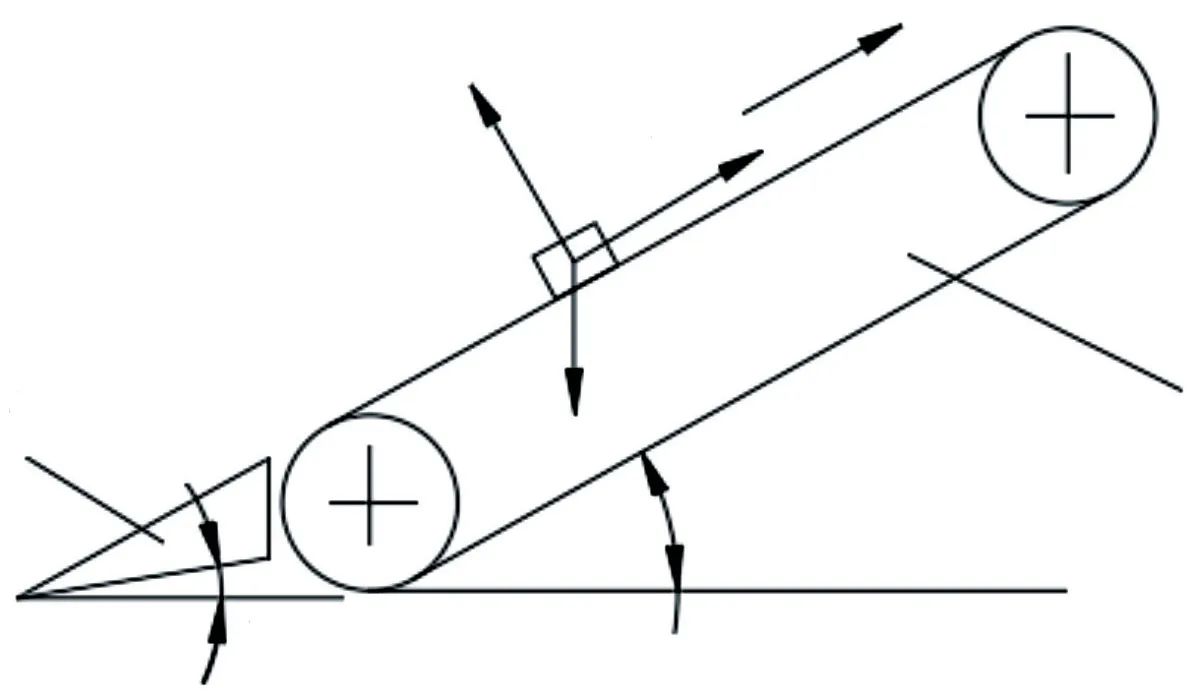
图6 混合物受力分析Figure 6 Force analysis of mixture
清茬机构中两个关键参数是铲茬刀入土角αc和链板的安装倾角αd,αc的取值根据农业机械设计手册中常用数值即可,链板的安装倾角αd的确定需要分析计算,因为αd过大,混合物达不到自锁条件,在输送板工作时在重力作用下下滑,无法达到输送的目的,αd过小,链板长度增加,整机尺寸增大。因此倾角取临界值较为合适。以根茬土块残膜混合物为研究对象进行力学分析[31]。

简化上式可得到链板倾角的取值范围,即:

式中:mc为根茬土块残膜混合物质量,kg;μh为混合物与链板之间的摩擦因数;fc为混合物与链板之间的摩擦力,N;Nc为混合物正压力;αc取值为18°左右。
3 田间试验
废膜捡拾机的评价标准一般为捡拾率和缠膜率,由于本设计增加了清茬装置,因此将清茬率也作为一个评价指标。通过田间试验,检测玉米地残膜捡拾清茬机的工作性能和运转可靠性。
3.1 捡拾率计算
《残膜回收机》鉴定大纲要求,随机选取玉米地段作为试验场地,取种植20 m玉米需要新地膜的质量为m1,捡拾机捡拾20 m废膜后,捡膜轴上卸下来的膜,洗净晾干后质量为m2,缠绕在机具上的废膜清理下来洗净晒干后质量为m3,收集的根茬中分离残膜洗净晾干后质量为m4。经多次试验取平均值,利用下式计算捡拾率。

3.2 缠膜率计算
缠膜率计算按照DG∕T 149-2019残膜回收机鉴定大纲要求进行:

3.3 清茬率计算
设种植20 m长的地块能种植x株玉米,将回收的根茬晒干,将土块清理干净后称质量,设质量为mm,设平均每个根茬质量为mp,则清茬率计算方法如下:

3.4 试验方案
田间试验选择在甘肃省庆阳市西峰区鄢旗坳村进行。选择不同的起膜齿入土深度、机具作业速度、土壤含水量,如表2所示。土壤类型为黄绵土,配套动力为105 kW凯特迪尔轮式拖拉机。土壤坚实度360 kPa。铲茬刀入土角可通过螺栓调节,起膜齿的入土深度通过调节螺栓调节。试验按照DG/T 149-2019《残膜回收机》鉴定大纲执行。图7为田间试验照片。

表2 试验数据Table 2 The data of test

图7 田间试验Figure 7 Field experiment
取捡膜齿入土深度为A、拖拉机作业速度为B、土壤含水率为C,根据机具和土壤结构情况,取拖拉机作业速度分别为3、4、5 m/s,入土深度分别为100、150、200 mm,土壤 含水率为13.45%、15.50%、17.65%。本次试验采用三因素三水平响应面分析,表3为试验因素水平编码表,利用Design-Expert软件设计试验,共进行24组试验,并且每组试验重复3次,按照式8、9、10分别求得捡拾率、缠膜率和清茬率的平均值。
4 结果与分析
4.1 回归模型分析
对表3试验数据进行方差分析,结果如表4所示,捡拾率R1的回归方程模型P<0.01,表明该模型高度显著,其中A、AB、B2对捡拾率R1影响极其显著,AC、A2对捡拾率R1影响显著。缠膜率R2的回归方程模型P<0.05,表明该模型显著,其中A、AC对缠膜率R2影响显著,A2对缠膜率R2影响极其显著。清茬率R3的回归方程模型P<0.01,表明该模型极其显著,其中A、B、B2对清茬率R3影响极其显著,C、AC对清茬率R3影响显著。这3个水平因素对捡拾率、缠膜率、清茬率影响的强弱次序均为:入土深度、作业速度、土壤含水率。

表3 试验因素水平编码表Table 3 The main influencing factors

表4 方差分析Table 4 Analysis of variance
4.2 各水平因素对捡拾率、缠膜率、清茬率的影响
根据Design-Expert软件对试验数据进行回归拟合,得到捡膜齿入土深度、作业速度、土壤含水率等因素对捡拾率R1、缠膜率R2、清查率R3的回归方程如下:

为了直观分析各水平因素交互作用,对各响应指标的影响,根据回归方程得到各响应面的三维立体图,如图8所示。
根据图8-A看出,当捡膜齿入土深度处在最低水平时,土壤含水率从13.45%增加到14.5%,废膜捡拾率逐步升高,当土壤含水率进一步增加时,捡拾率略有下降;当土壤含水率一定,捡膜齿入土深度越大,捡拾率越高。这说明在废膜捡拾时,土壤含水率影响捡拾效果,土壤含水量过大时,土壤和废膜难以分离,也会造成混合物与捡膜齿粘连难以分离,影响捡拾效果。捡膜齿入土越深捡拾效果越明显。从图8-B可知,捡拾机作业速度处在最低水平时,土壤含水量率越高捡拾率越高,当土壤含水率处于最低水平时,作业速度从3 m/s增大到4 m/s时,捡拾率呈增大趋势,当作业速度继续增加时,捡拾率呈下降趋势。这说明,作业速度在一定范围内速度越大越有利于废膜捡拾,但当增大到一定值时,对废膜捡拾效果产生不利影响,这是因为,作业速度快时,拖拉机输出转速增加,使得捡膜轴转速增加,捡膜齿与废膜接触次数增加,离心力也增大,一部分废膜在捡拾过程中被甩出,而来不急缠绕在捡膜轴上。

图8 各影响因素对捡拾率、缠膜率、清茬率的影响Figure 8 Influence of various factors on picking up rate,film wrapping rate and stubble cleaning rate
从图8-C看出,当捡膜齿入土深度处于最低水平,土壤含水率在13.45%~14.85%,缠膜率有下降趋势,当土壤含水率继续增大时,缠膜率上升较快。当土壤含水率一定,捡膜齿入土深度从100 mm增加到150 mm时,缠膜率逐渐增大,当超多150 mm时,缠膜率逐渐下降。这说明,土壤相对干燥时,废膜也比较干燥,质量较轻,捡膜齿在捡拾到废膜后容易缠绕在捡膜轴上,当土壤含水率高时,废膜和土壤粘连较多,混合物质量较大,离心力也较大,容易被甩出而缠绕在机器上。捡膜齿入土深度浅时,废膜一般在捡膜齿齿尖,容易被甩出缠在机器上,入土深度较大时,废膜在土壤挤压下,在捡膜齿上越靠近捡膜轴,越容易缠绕在捡膜轴上。从图8-D可以看出,当捡膜齿入土深度处于最低水平时,作业速度越大,缠膜率越大,因为作业速度越大,捡膜轴转速越大,捡膜齿捡拾废膜过程中在离心力的作用下,越容易甩出而缠绕在机器上。
从图8-E可以看出,当捡膜齿入土深度处于最高水平,土壤含水率从14.5%升至17.65%时,清茬率呈上升趋势。当土壤含水率一定,捡膜齿入土深度从100 mm增大到150 mm时,清茬率呈下降趋势,当入土深度继续增大时,清茬率增大较快。这是因为,土壤含水率越高,土壤越松软,清茬机构的清茬刀越容易将根茬铲起,并轻松将其送入链板输送机构。捡膜齿本身与清茬工作并无关联,但本机在增大捡膜齿入土深度时,使得整机距离地面的高度下降,这也无疑增加清茬机构中清茬刀的入土深度,因此,清茬刀入土越深,根茬清理越干净,但深度越大,土壤阻力越大,对动力需求就越大。从图8-F可以看出,当土壤含水率一定,作业速度从3 m/s逐渐增大到4 m/s时,清茬率逐渐增加,出现峰值,当作业速度继续增大时,清茬率逐渐降低。说明作业速度对清茬效果影响较大,当作业速度在一定范围内,越高越好,因为清茬刀在随机器前进时,速度慢会造成壅土现象,因此速度较快时,便于铲茬刀工作,并且土壤和根茬混合物便于在输送链板运动,混合物在链板输送过程中,逐渐从链板缝隙洒落在地表。但当作业速度过快时,铲茬刀也会造成壅土,链板上的土壤根茬混合物在链板运动过程中,一部分混合物重新调入地面,造成清茬率下降。
4.3 参数优化与试验验证
根据以上分析,以及利用回归方程(11)、(12)和(13),以提高捡拾率和清茬率、降低缠膜率为目标,应用Design-Expert中的优化模块,对捡拾率和清茬率、降低缠膜率的回归方程进行优化,得到最优工作方案:捡膜齿入土深度为200 mm,牵引速度3 m/s,土壤含水率17.65%。为验证优化后工作模型的可靠性,根据优化参数设置试验参数进行试验,试验共进行3次,将测试值求平均值,试验结果捡拾率为94.9%,清茬率为94.8%,缠膜率为1.38%,3个响应值与预测模型计算值误差均在3%以内,说明优化模型可靠。
5 结论
1)针对滚筒式废膜捡拾机膜土不分离、杆齿式卸膜困难、弹齿式遇到玉米根茬无法弹起,以及玉米根茬残留土壤影响农机具寿命等问题。在杆齿式结构的基础上,增加破茬机构、割膜机构、清茬收集机构。
2)以捡膜齿入土深度、作业速度、土壤含水率为影响因素进行试验,利用Design-Expert软件对田间试验的结果进行响应面分析,3个水平因素对捡拾率、缠膜率、清茬率影响的强弱次序均为:捡膜齿入土深度、作业速度、土壤含水率。
3)应用Design-Expert中的优化模块,得到最优工作方案:捡膜齿入土深度为200 mm,牵引速度3 m/s,土壤含水率17.65%。根据优化后参数再次进行田间试验,试验结果捡拾率为94.9%,清茬率为94.8%,缠膜率为1.38%,3个响应值与预测模型计算值误差均在3%以内。将此优化参数作为废膜捡拾工作的参考数据。
