基于单片机HT32F52352的六旋翼机器人设计
2023-01-07牟琪琦陈柯蓉余树林郑皓文
杨 川,牟琪琦,陈柯蓉,余树林,郑皓文
(重庆机电职业技术大学,重庆 402760)
0 引言
近年来,我国航天、航空事业迎来了迅猛发展的新时期。为培养航天和计算机智能控制领域的高端人才,推动相关技术的发展,多旋翼多功能飞行机器人的研发成为研究热点。同时,飞行机器人的工作环境已经从固定的工作环境发展为自主和非结构化的工作环境,但目前涉及航空航天领域的多功能飞行器仅有飞行、定位、拍摄等功能。此外,多数以单桨和四旋翼飞行器为主,此类飞行器往往无法胜任复杂严峻的环境要求。本文设计的六旋翼飞行机器人可以克服此类困难,并应用到各类复杂多变的环境中。
1 系统方案设计
系统采用HT32F52352单片机作为主控制器,能实现飞行、翻转、自动避障前行、三维抓取、勘测等运动。工作流程是六旋翼机器人接通电源后,程序自动初始化进入自动模式,不需要做任何操作,处于自动飞行和避障模式,当操作人员用上位机软件或无线遥控器控制时,切换到受控模式。普通环境和简单动作依靠自动模式即可完成,但各种复杂环境、动作组的实现需要在受控模式下进行。六旋翼机器人系统结构包括小型涵道推进器、传感器部分、控制器部分、执行机构部分和电源模块等部分(见图1)。
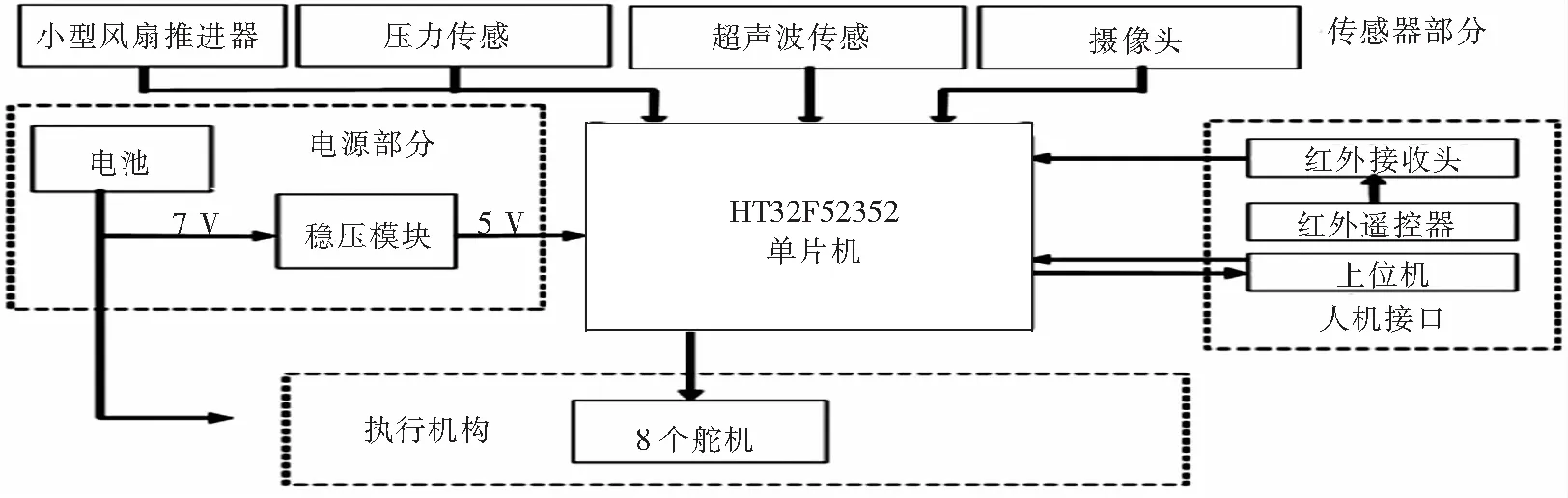
图1 六旋翼机器人系统方案设计
1)小型涵道推进器:通过高速转动对机身上下方气流产生压强差,使六旋翼机器人的身体在压强差的推动下缓缓升起,从而实现飞行的功能。
2)传感器部分:负责感知外部的环境信息和实现勘测功能,为六旋翼飞行机器人运动的实现及相关任务实施提供所需要的信息。包括陀螺仪、压力传感器、超声波传感器、摄像头等子模块。
3)控制器部分:包含上位机控制和机器人机身的主控制器,主控制器选择HT32F52352单片机作为控制核心,接收到命令和传感器采集数据后,在单片机中进行数据的分析处理,提取有关信息,通过轨迹的规划算法得到执行动作组信息,再传递给相应的执行结构,控制六旋翼机器人完成各种指定任务。
4)执行机构:负责执行动作组的信号,实现六旋翼机器人各种形态的运动变化。执行机构主要是机身的3个关节处的8个舵机。
5)电源部分:包括电池和稳压模块,向各个模块提供电源。由于6个小型涵道推进器是整个飞行器飞行的动力来源,功率较大,每个小型涵道推进器各使用1个电源稳压模块;机身3个关节处的8个舵机共用1个电源稳压模块;为了减少干扰,传感器部分和控制部分单独用1个电源稳压模块。
2 机械结构和硬件电路设计
2.1 关节设计
关节设计可分为二维结构和三维结构。本文采用的是三维结构的关节设计,虽然会导致六旋翼机器人的灵活性大大降低,但却可以适应不断变化的风速,同时保证增加飞行高度后能够保持更强的稳定性,使六旋翼机器人的运动特点得到充分体现。为了实现三维结构,每一节关节处安装2个涵道和2个舵机,相邻的关节结点再用1个舵机连接,3个关节总共需要6个小型涵道推进器(含各自的电调模块)、8个舵机。
六旋翼机器人的头部安装一个可360°旋转的小功率舵机,以增加头部的自由度,头部在勘探过程可实现多角度的数据采集。
2.2 舵机选取
六旋翼机身主体部分的动作动力源为舵机,由于整个机身较重,在飞行过程中转动时需要的力矩较大,故舵机选取SH10-F型舵机。此舵机长40.8 cm、宽38 cm、高19.8 cm;堵转力矩为15.25 kg/cm,起动转矩为10.51 kg/cm,工作电压DC 5~9 V。主要由金属外壳、板、发动机、锥齿轮、PSD(位置敏感器件)构成。基本满足本设计要求。
该舵机极限角度为15°~-215°,即为200°,能够实现六旋翼的整体翻转功能。舵机的控制通过输入特定PPM脉冲信号来控制所转角度。
2.3 推进器选取
为了使六旋翼机器人可以在空中飞行,采用小型涵道推进器作为飞行动力来源,小型涵道推进器具有直接起降、可悬停、低噪音、升力大等特点。由于六旋翼整体重量不能过高,小型涵道推进器只能按照1.5倍功率余量选择,一旦出现飞行不稳、不平衡现象,很容易出现小型涵道推进器烧毁现象。为了方便维修,将小型涵道推进器的连接装置与六旋翼的躯体部分分开设计,即在躯体下加装可拆卸的小直径从动轮与小型涵道推进器。
2.4 运动自由度研究
通过研究,各个模块的运动自由度对六旋翼机器人的动作执行效果具有重要意义。故本项目最终采取的是模块化设计方案。每个模块的单独组成可以大大降低维修难度,可随时进行模块替换。若测试时发现动力不足可立即更换高功率涵道推进器,发现飞行失衡可立即更换稍小功率涵道推进器(选择功率越大的涵道推进器,重量也越大)。多个模块具备拆装灵活性,可以通过不断更换参数和位置找寻最合适的启动力矩与质量的比例,通过3个关节选择不同的连接点和左右配重,可以克服运动不协调的问题。
3 控制算法和核心程序设计
3.1 上位机程序设计
上位机控制主要利用LabVIE实现,采用图形化编程,此方案具有明显的优点。①LabVIE可实现数据的实时采集和传输,保证六旋翼机器人的飞行状态和采集数据在上位机上实时呈现,提高控制效率和安全性。②通过LabVIE软件将上位机程序变成简单的图形,使程序简单化、易上手、扩展空间大。③利用LabVIE软件中的函数库,将六旋翼机器人各个小型涵道推进器(含各自的电调模块)和舵机的使能、启动、模式切换等复杂控制程序简化为调用函数库的方法,从而降低程序指令在运行过程中的跑偏与卡死,增加程序的流畅性、快速性。
3.2 主控制器程序设计
主控制器的程序主要对六旋翼机器人具体的运动方向、轨迹和执行动作等进行控制。
3.2.1 六路PWM程序设计
6路PWM主要用于控制6个小型涵道推进器的功率大小,从而保证六旋翼机器的起飞、降落、悬停,通过PID算法改变6路PWM的占空比可实现姿态的平衡。6路PWM的输出使用软件模拟法完成,可大大降低程序复杂程度,同时确保6路PWM频率的一致性。选用单片机定时器模块中定时器0作为时间产生模块,通过中断系统改变脉冲的周期与占空比,实现矩形波的占空比可调。经过测试,小型涵道推进器的有效控制占空比为5.5%~17%,超过17%小型涵道推进器将直接失控,低于5.5%小型涵道推进器将无法转动,出现堵转现象。
3.2.2 轨迹规划设计
轨迹的规划是主控制系统核心设计内容之一。最佳的轨迹规划可以提高六旋翼机器人的稳定性和工作效率,降低六旋翼机器人的耗电。通过对实际测试得到的六旋翼机器人上升姿态与速度的分析,若将六旋翼机器人分为日常轨迹模式与复杂轨迹测算分析模式,难以区分特异性和异常位置。通过查阅国内外相关文献,本文采用在时间上优化作业的空间轨迹规划方案(即DELTA轨迹方案),并在实际测试中不断改良,最大限度地加快作业时间。六旋翼机器人的空间轨迹规划数学理论公式为:
根据以上公式,通过换算变成程序,实现轨迹的设计,并通过不断实际测试优化参数。主要方法是实际运行过程中改变垂直区域和平面区域的最大的速度与质量之比,将路线中的第一个点位置和端点的位置记录下来,并将信息保存在单片机的ARM中,实现不断的算法优化。
根据六旋翼机器人运动指令与上述轨迹规划算法结合得到的数据,将它转换成PWM控制信号,发送给相应的执行单元,实现六旋翼机器人的前进、后退、避障等。即无论何种环境和条件下、无论受控或者自动控制模式下,均可自动规划出最佳的飞行轨迹。
3.3 无线遥控系统设计
自动模式下仅需要通过上位机发送命令后,自主规划路径、自主运行。无线遥控系统主要在受控模式下使用。
无线遥控系统的整个控制过程就是一个编码和解码的过程,能够实现远程无线控制的方案很多,若采用传统控制方案(改变载波信号占空比大小,编码后通过无线传输接收,再解码),传输有一定延迟,容易丢帧,且不适用于大量控制信号的高速传输。本文设计的六旋翼机器人使用的是日本生产的NP02LM无线遥控传输方案,此方案采用的是连续的32位代码,最初的24位是地址代码(相当于各远程控制器的唯一ID)。保证遥控器的控制唯一性,防止被“串台”或者被其他人解码控制,最后的8位数字是数据代码,最大可实现20个按键的独立控制,20个按键的控制组合远远能够保证本项目所需的所有操作需求。
4 测试方案及完善方法
六旋翼机器人的测试方法不仅仅局限于一种模式的测试,既要测试受控模式,也要测试自动模式。在测试的具体参数中,主要测试不同模式的飞行高度、飞行偏置角度、抓取灵敏度、转动角度等。通过在不同环境、不同模式下飞行稳定性的数据记录、检测,将最终数据进行对比,对不足之处进行修改、改进,不断优化轨迹规划算法和6路PWM输出精度等。
5 实现功能与创新点
1)安全性好。由于六旋翼机器人能够实现任意翻转、机身弯曲和折叠等动作,所以比起其他飞行机器人优秀,并且它可以飞进阴暗狭窄的环境,在危险环境中工作,完成指定的任务。在六旋翼机器人上安装报警装置后,可以让六旋翼机器人完成高空检测、报警任务。
2)可作为远程操作机械手臂。通过在六旋翼机器人的身上安装所需装备后,它将变成一个具有自由组装弯曲的机械手臂,完成各种复杂的高空捕捉。例如在阴暗狭窄的空间里进行捕捉,崎岖蜿蜒的空间里检测识别、抓取等。
3)具有监控、跟踪等功能。由于该六旋翼机器人设计之初便加装各种传感器(热释电红外传感器、超声波传感器、压力传感器、摄像头等)和预留了许多传感接口,通过现有功能和传感器加装即可实现各种环境下的定位、人员检测、拍摄、录像、跟踪等功能。
