大视场光学显微成像技术
2023-01-07王义强林方睿刘丽炜屈军乐
王义强,林方睿,胡 睿,刘丽炜,屈军乐
(1. 深圳大学 物理与光电工程学院, 广东 深圳 518060;2. 光电子器件与系统教育部/广东省重点实验室, 广东 深圳 518060)
1 引 言
光学成像系统的信息通量常用空间带宽积(Space-Bandwidth Product,SBP)来衡量,SBP是一个无量纲数,可以理解为系统视场(Field of view,FOV)内可分辨的像素点个数, SBP越大,系统可传输的信息就越丰富。常规的光学显微镜,其成像SBP在数百万量级。系统的SBP提升主要受两个因素限制:一是探测器的像素尺寸和像素数量,目前随着以sCMOS为代表的大尺寸高分辨率相机的发展,探测器的像素数已经可以达到2×107,像素尺寸达1.5 μm,因此其已不再是系统SBP的技术瓶颈;二是成像光路,SBP的提升主要受制于显微系统的成像物镜。常用的商业显微物镜,其SBP在不考虑离轴像差影响的情况下,一般不超过107,因此提升成像光路的SBP是提升整个系统大视场光学显微成像能力的有效途径[1]。
提升系统SBP的基本思路有两种,简单来说,就是在保持分辨率的基础上,扩大视场;或者在维持视场的基础上,提升分辨率。目前,光学显微系统的分辨率最高可达衍射极限(约200 nm),低至数个μm,由物镜的数值孔径(Numerical Aperture,NA)和工作波长λ决定。然而,在实际应用中,分辨率可提升的范围有限,以荧光显微成像中的结构光照明技术(Structured Illumination Microscopy,SIM)为例[2],使用线性结构光照明样品的方法最多可以将分辨率提升一倍,虽然使用非线性结构光可以实现更高的提升倍率,然而其会产生强烈的光损伤,且实际可提升的倍数也有限[3],因此,这种方法并不常用。与之相似的还有傅立叶叠层显微技术(Fourier Ptychography Microscopy,FPM)。其通过频域多角度照明的方法实现视场内分辨率的数倍提升[4]。由此可知,利用分辨率提升的措施使SBP达到十倍百倍的提升,并不现实。
而基于扩大成像视场,进而提高获取图像像素数的方法,已经得到了有效的验证[5-8]。一个常用的做法是用高NA,小视场的成像物镜对样品做多次成像,再用二维互相关技术等将各子视场的图像拼接,获取高分辨率的超大视场图像。这一方法在组织切片成像,病理诊断等领域已得到广泛应用[9-10]。拼接成像的优势在于这一技术非常成熟,系统相对简单。电动样品位移台可以实现样品微米级精度的二维或三维移动,物镜扫描系统和自动对焦算法也可以使物镜在样品每次移动后实现自动对焦并成像。因此无论是用现有显微镜改造,还是购置新品,实现拼接的大视场成像均不困难。然而,对于拼接成像技术,由于其每个子视场在时间上和空间上的采集都是离散的,因此需要更多的采集时间,这些时间更多地被用于样品移动和物镜对焦,而不是光子采集。长时间采样时,来自温度的变化或环境的振动有可能导致样品离焦以及产生运动伪影,高NA的物镜对于环境变化则更为敏感[5]。此外,较长的采样时间也限制了这一方法的应用范围,如无法用于大视场的生物样本实时动态检测。
综上所述,通过提升分辨率或者是采用拼接成像的方法提升成像系统的SBP各有弊端:前者的提升能力有限,难以满足大视场光学显微生物成像的需求;后者耗时太长,不适用于快速的在体观测。一类有效的解决办法是通过直接扩大成像视场来提升SBP。它可以在较短的时间内获取高像素数图像[11]。但需要注意的是,系统的SBP受空间分辨率和视场范围影响,会决定单次成像的像素数上限,而系统的实际像素数还会受探测器的限制,因此探测器的选型需要和系统设计匹配。
2 技术与应用
光学显微成像系统的SBP常用公式SBP=0.612×π2×r2/F2计算,其中r为系统视场半径,F为系统分辨率。本文重点介绍了几种目前发展较好的大视场显微成像技术,主要有以下4种:一是兼顾高分辨率和超大视场的大视场物镜成像技术[1,11-12];二是通过曲面探测实现更大视场成像的曲面探测成像技术[7,13-14];三是基于“化整为零”思路的阵列显微成像技术[15-17];四是彻底摆脱折射光学固有限制的无透镜显微成像技术[18-21]。这几类技术在探索高像素数成像方面取得了卓有成效的进展。本文介绍了这些技术的原理和特点,以及它们在生物医学领域的最新研究进展,并讨论了它们在其他领域,如高速成像方面,存在的挑战以及可能的解决方案。
2.1 大视场物镜成像
通过自行设计和定制物镜,实现大视场的高分辨率成像是近年来大视场物镜成像的一个重要发展方向。定制的物镜可以突破传统物镜的外形尺寸约束,使整个视场内的分辨率得到提升并提高SBP,目前已有多个设计成果和相应的应用出现。它们的特点是低放大倍率和高NA设计。低放大倍率一方面有利于产生大FOV(Field of View),另一方面也兼顾了实际探测器的感光尺寸。NA值一般在0.5到1之间,成像分辨率可达微米和亚微米级别。2015年,Tsai等人[6]依靠优化透镜色差实现了10 mm直径超大视场,但其设计基于4倍放大率0.28 NA物镜,分辨率过低。McConnell等人[22]设计了一款大视场物镜, 视场直径可达6 mm,并具有4倍放大率,NA约为0.5,可用于共聚焦式的点扫描成像和宽场成像两种模式。共聚焦模式可实现200 μm的成像深度,而落射宽场荧光成像可实现92 frame/s的成像帧率。为实现低放大率下的高NA,物镜直径需达63 mm,这几乎是常用物镜的两倍。横向分辨率为0.6 μm,轴向分辨率为6.3 μm,不考虑像差的影响(后续SBP的计算类似),SBP值约为9.2×107。该课题组使用落射宽场荧光成像模式实现了小鼠胚胎脑部神经元结构的高分辨率多色结构成像。同年,美国的Sofroniew等[12]使用大视场物镜实现了5 mm超大视场的双光子荧光成像,激发波长为970 nm时,横向分辨率可达0.66 μm,SBP约为5.3×107。利用这一成像平台,结合灵活的扫描策略,他们实现了活体小鼠皮下1 mm深度内的脑皮层神经元结构成像,如图1所示。然而,大视场物镜成像和传统的显微镜一样,都会受到离焦背景的影响,导致实际分辨率低于理论值[23]。虽然共聚焦成像和双光子成像可以提供良好的光学层切能力,降低了离焦背景的干扰,但是其成像帧率受点扫描模式的制约。例如McConnell等人所设计的基于大视场物镜的成像系统,采用共聚焦扫描模式时的帧率约为5×10-3frame/s[22]。

图1 大视场物镜双光子脑成像[12]。(a)成像系统光路图和物镜实物图(左上);(b) 活体鼠脑神经细胞的双光子成像,深度为150 μm;(c)图(b)中虚线框内的细节放大图Fig. 1 Large FOV objective two-photon brain imaging[12]. (a) Optical path diagram of the imaging system and objective lens(upper left); (b) two-photon imaging of neuronal cells activity of mice brain in vivo, the depth of imaging is 150 μm;(c) magnification of some details in white box of (b)
因此,人们将注意力转向了光片显微成像(Light-sheet microscopy,LSM)[24]。这是一种可以兼具宽场成像的快速和共焦成像的光学层析技术。但是传统LSM的聚光镜和成像物镜多为普通的商业显微物镜,激发区域和成像视场有限,未能突破SBP的限制。因此将光片照明和大视场物镜结合,则可以实现优势互补,2018年,Schniete等[25]利用McConnell设计的大视场物镜,发展了一种基于散斑光片照明的大视场成像系统,实现了0.7 μm的横向分辨率,7 μm的轴向分辨率。与基于该物镜的共焦成像模式相比,分辨率几乎一致,速度却有了30倍的提升,并且像素数较传统光片显微镜高一个数量级。 与落射宽场成像相比,光片成像拓展了深度成像的功能。利用这一方案,Schniete等实现了对斑马鱼全身的高分辨成像。系统光路和结果如图2所示。

图2 基于散斑光片照明的大视场成像系统[25]。(a) 系统光路示意图,激光经磨砂玻璃片形成的散斑图案投影在体积为4.4 mm×3 mm×3 mm的样品内,形成厚度约为3 μm的散斑光片照明;(b) 用光片照明模式实现斑马鱼全身成像;(c)用共聚焦模式实现的斑马鱼全身成像Fig. 2 Speckle light sheet illumination-based large FOV imaging system[25]. (a) System setting, the speckle pattern formed by the laser through the ground glass disk is projected into the sample with a volume of 4.4 mm×3 mm×3 mm, forming a speckle light sheet with a thickness of about 3 μm for illumination; (b) Zebrafish whole body imaging with light sheet illumination; (c) Zebrafish whole body imaging with confocal microscopy
虽然大视场物镜成像系统相对于传统光学显微系统实现了SBP一个数量级的提升,然而它所用的物镜尺寸通常较大,这一方面是由低放大倍率和高NA值的设计要求所限制的,另一方面也是出于像差校正的需要,消除像差所需使用众多透镜,增加了成像物镜的重量和体积,这导致通过移动物镜来实现样品体成像难以实现[26-27]。对于宽场成像,场曲等离轴像差会导致图像中心和边缘的分辨率产生较大差异,使这一技术难以在生物医学领域得到广泛的应用。对于点扫描成像方式,由于常规扫描元件的孔径较小,若要将扫描光束填充物镜的出瞳以达到最佳的分辨率,则需增加相应的扩束系统。然而,扩束系统会降低扫描视场角,这导致实际的扫描视场范围缩小[28],因此需要相对复杂的扫描系统才能实现全视场成像。此外,视场中心和边缘像差的变化同样会对点扫描成像的图像质量产生影响。因此在生物应用领域使用大视场物镜直接成像依然面临着诸多限制。
2.2 曲面探测成像
大视场物镜成像系统虽然提供了大视场高SBP的成像技术,但它是基于物镜直接成像设计的,大视场条件下离轴像差的影响导致这类透镜的设计和制造极度困难,并且实际性能差强人意。而在各类离轴像差中,场曲的校正相对不同。根据Seidel像差理论[29],若某一折射面的球差系数为0,则其慧差和像散的系数也为0,而场曲包含匹兹伐尔场曲和像散,匹兹伐尔场曲系数的修正与球差的修正并不同步。一般显微物镜的场曲校正需要在实像面处增加负光焦度的场镜,而这又会重新引入其他像差,使设计愈加复杂,需要更多的透镜进行校正,并且场曲也是导致获取的图像中心和边缘像质差异较大的原因之一。曲面探测成像技术则放宽了对场曲的限制,利用平面-曲面-平面的成像策略,降低了对主物镜的像差修正要求,实现了高SBP成像并缓解了设计和制造方面的挑战。这种曲面探测成像方式早在2002年就应用在天文望远镜领域[30]。此外,不同视场处分辨率不一致的情况被大大缓解,因此相对于平面成像,曲面探测可允许对更大的视场成像。其具体方式为:通过一个大视场成像物镜,将平面物体成像在其后方的匹兹伐尔像面,一般是个球面;其次,将球面图像光学转移到传统的平面探测器上,转移方法可以是基于波导的传输或是使用小尺度相机,或是直接使用曲面图像传感器探测[31],但这一方法常用于超大视场全景成像,并不适用于生物显微成像。
在生物医学领域,曲面探测成像技术也有较大的进展。2005年Potsaid等[32]利用曲面成像和自适应扫描技术(Adaptive Scanning Optical Microscope,ASOM),将前置主透镜的每个子像面的场曲交由后置小尺度相机补偿,并配备了可变形镜(Deformable mirror,DM)消除其他的离轴像差,并结合高速二维转向镜和定制的扫描透镜组件,实现了单个后置小尺度相机对前置主透镜形成的大尺度曲面图像的串行采集,再通过数字合成,得到40 mm直径的FOV和1.5 μm的分辨率,成像物镜的SBP约为6.5×108,比平场设计的大视场物镜SBP高一个数量级。但是这一方法由于受到串行采集速度的限制,难以用于大视场动态成像。
基于并行采集的成像技术可以有效解决这一问题。一种直接方法是利用与主物镜像面平行排布的多相机阵列并行采集图像。每个相机对应的像面则可以近似为平面。此外由于不同相机对应的不同像面具有不同的视场角和像差系数,因此各相机的镜头可以针对不同的像差系数做特异性补偿,从而实现FOV内成像质量的均衡。清华大学戴琼海院士课题组开发的RUSH系统就是其中的代表[14]。他们利用一个定制的大视场物镜和一个5×7的相机阵列,实现了10 mm×12 mm的大视场成像,视场内的分辨率为1.1~1.4 μm ,差异较小。每帧图像超过1.7×108像素,结合高速数据处理系统,该显微系统每秒可获取30帧图像,共约5.1×109像素。利用这一装置,该课题组实现了对活体小鼠脑部免疫细胞的长时间追迹。
曲面探测成像技术的核心思路和大视场物镜成像技术类似,都是通过直接提升成像物镜的SBP来实现大视场成像。因此,复杂的物镜设计和高难度的制造工艺,导致系统成本无法降低,难以广泛地应用到生物医学研究中。但同时它还揭示了另一个事实,那就是小孔径系统的像差大小和控制难度远低于大孔径系统。基于这一事实,一项新的大视场光学显微成像技术发展了起来。
2.3 阵列显微
既然单个显微镜的成像视场太小,那么是否可以多个显微镜并用以扩大成像视场呢?多轴显微和阵列显微回答了这一问题。多轴显微是将多个显微成像光路耦合,利用多个探测物镜,同时探测不同的区域,观察这些区域之间可能的相互联系[33-34]。但是在实际应用中,由于光路设置空间的约束,往往只能实现双光路耦合或三光路耦合[35],虽然这一技术在对如不同脑区的动态响应观测应用中有良好的表现[36],但其最终SBP的提升有限。阵列显微是另一类并行大视场显微成像技术。其与曲面探测成像的区别是阵列显微将曲面探测成像的主物镜换成了微透镜阵列,每一个微透镜对应一个子FOV,并经过后续的光路成像在探测器上。从本质上看,阵列显微就是将一组小视场显微镜阵列排布后对样品并行采集,后合并为一张大视场的数字图像,这与多轴显微具有异曲同工之处。阵列显微由Weinstein等[15]开发,该团队使用的微透镜阵列包含80个微透镜,每个微透镜的NA为0.65,FOV直径为0.25 mm,对应SBP为~8.7×105,整个系统由80个微透镜组成,单次成像可获取一个总SBP为7×107的图像,其性能已经超越了传统显微物镜。使用该系统,他们展示了一个具有亚微米空间分辨率的225 mm2区域的大型病理切片数字扫描图。阵列显微的一个显著的优点是:相较于需要执行二维扫描才能实现大视场成像的传统小视场多次成像技术,阵列显微由于其微透镜阵列可以设计为倾斜排列,使一个方向上的视场在扫描时存在重叠,因此只需要执行一维扫描既可以实现全视场的覆盖,结构更简单,速度也更快,且降低了微透镜之间的空隙[15,37]。微透镜的排布示意如图3所示。

图3 微透镜的排列与扫描方向示意图[37]Fig. 3 Schematic diagram of microlenses arrangement and scanning direction
一个避免机械扫描,仅需通过数字合成的办法是使用时间顺序成像替代机械扫描,2011年McCall等[38]为每个微透镜提供单独的照明,且相邻视场依次成像,从而保证每个微透镜图像可以在相机上相互重叠,其代替了机械扫描并且放宽了对放大倍率的约束。近年来阵列显微和荧光成像的结合也取得了不少进展。早期的阵列显微镜,物镜和管镜均为微透镜阵列,虽然结构紧凑,但也使滤光片的介入难以实现,从而无法有效分离激发光和荧光。2013年,Orth等[39]利用水浸的微透镜阵列成一次像,再用单反相机做二次成像到传感器上,并将一个高通滤光片置于CMOS传感器和单反镜头之间,实现了小鼠肾脏切片的单色荧光成像,成像视场为1 cm×0.6 cm,横向分辨率为1.7 μm,系统的总SBP达到了108量级,如图4所示。Son等[17]利用具有更大NA值(约0.5)的GRIN透镜阵列替代传统的球面透镜阵列,降低了阵列系统的成本和重量。
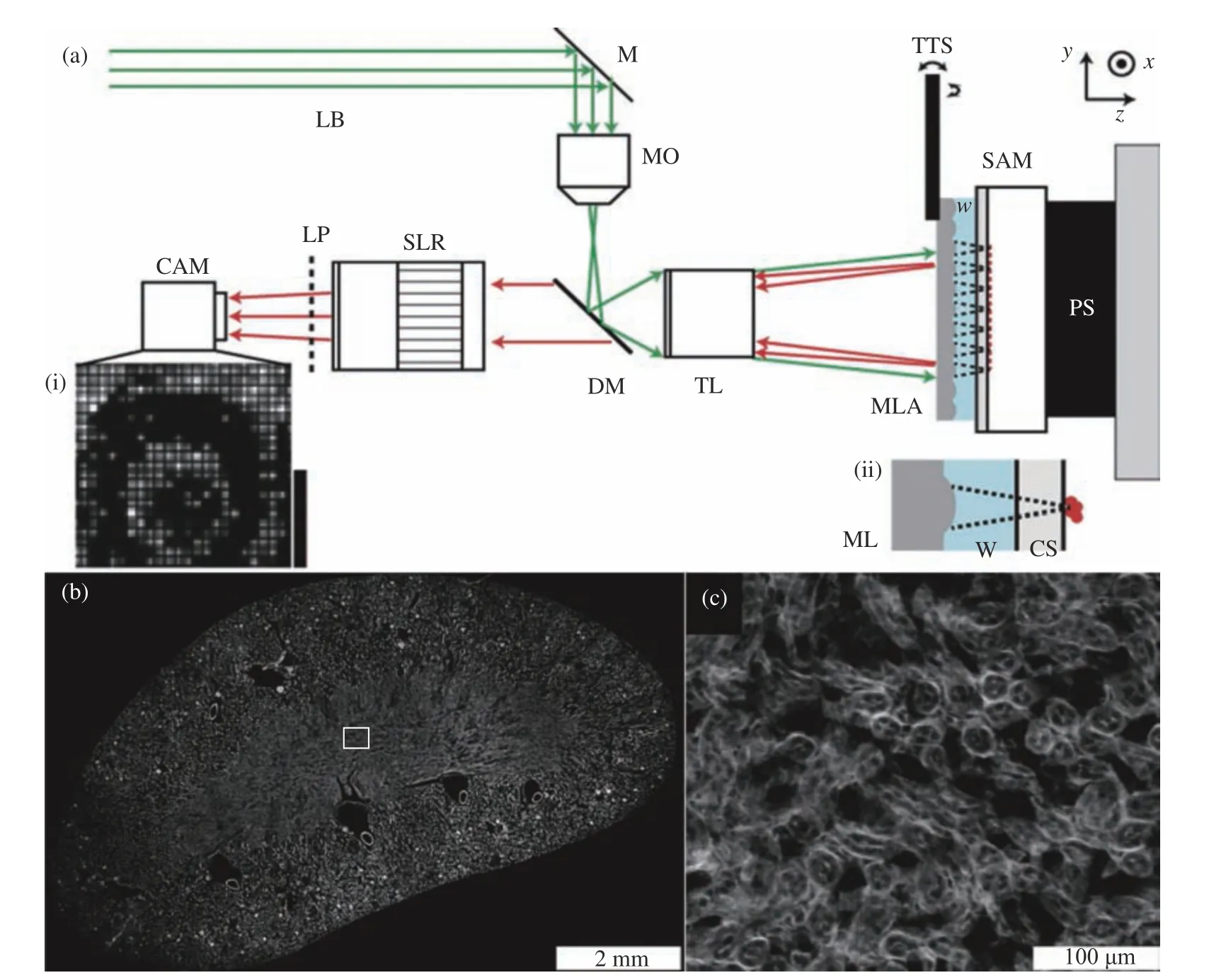
图4 阵列显微系统[39]。 (a) 阵列显微系统光路设置;(b) 小鼠肾脏切片的高通量成像;(c)图(b)中方框内的放大图Fig. 4 Array microscopy system[39]. (a) The optical setting of array microscopy; (b) high-throughput imaging of mouse kidney slices; (c) magnification of the rectangle in (b)
阵列显微成像另一个显著的优点是由于微透镜阵列的孔径可以做到很小,因此一个微透镜阵列可以由多个微透镜组成,每个微透镜所对应的视场角也可以做到很小,例如Orth课题组所使用的微透镜阵列,其单个微透镜的直径为122 μm[16],对应视场角仅有2.5°,因此视场内焦斑的大小和形状没有明显的差异,单个微透镜对应的视场内分辨率的散布也很小,约1.30 ± 0.15 μm。此外,微透镜阵列的透镜数量可以根据需要灵活设置,视场的可拓展性更强,如前述Son的系统就实现了模块化定制,因此相对于大孔径物镜而言便利性更好,结合高分辨率的面阵探测器,可以实现快速的高通量成像。用微透镜阵列替代常规物镜的好处在于可以使系统全视场内分辨率散布非常好,并且SBP的扩展相对容易。然而,平面排列的微透镜阵列结合的焦深有限,使得系统对样品的表面平整度要求苛刻,阵列显微的应用场景也因此受到了极大的限制,目前主要用于对组织切片等表面平整的样品进行成像[40]。
以上提到的3种技术,都是在高分辨率的基础上通过扩大成像视场,进而提高系统的SBP,最终实现高像素数图像获取。这虽然是主要的大视场光学显微成像方式,但是从系统结构的简化和实现的难易程度上来讲存在劣势。以下提到的方法相对更具优势,在一些特殊的大视场光学显微成像应用领域,已然拥有一席之地。
2.4 无透镜显微
无透镜显微技术是一种舍弃了传统的折射光学系统,使用探测器直接对薄样品成像的技术。在系统复杂度方面,它比基于折射光学的显微系统简单的多。在技术难度方面,由于小像素尺寸高像素数量的数字图像传感器技术日渐成熟,以及对采集的衍射图像的处理和重建算法的不断进步,无透镜片上显微技术的实现难度大大下降,目前它的发展已经进入了快车道。按照技术原理,无透镜片上显微技术可以大致分为无透镜阴影成像[41-42],无透镜荧光成像[19,43-44],无透镜全息成像[45-46]3种。无透镜阴影和无透镜荧光成像都是“所见即所得”的成像方式,传感器芯片上样品产生的阴影或荧光分布被传感器记录后直接形成图像。区别在于荧光成像方式需要实现激发光和荧光的分离,具体措施多样,常用的有利用全反射[19],或在样品和探测器之间增加滤光片[44],以及将滤光片集成到探测器上[43]。无透镜全息成像则不同,传感器获取的是样品的相干衍射图样,需要利用重构算法恢复样品的相位信息。
它们的成像视场主要由探测器的感光区域面积决定,目前CCD和CMOS的成像视场大小从20 mm2到20 cm2不等[8,47],取决于具体所用的传感器。单就成像视场而言,已经远大于折射显微系统。就实际分辨率而言,3类技术存在差异,初始条件下,无透镜显微成像的分辨率极限基本取决于传感器像素大小。系统的SBP和传感器像素数一致,可达到107量级。无透镜阴影成像可以利用样品和传感器之间的微孔径阵列进一步提升分辨率。2009年Lee等[42]在一个像素数为1 024 pixel×1 280 pixel,像素尺寸为5.2 μm的CMOS芯片上,借助微孔径阵列,实现了0.8 μm的分辨率,系统SBP约为2×108,提升了约15倍。无透镜荧光成像则是借助了一些硬件和软件方法,但目前分辨率通常低于1 μm[19,43-44,48],在SBP方面要低于阴影成像,因此这两种方法本文不做过多介绍。
无透镜全息成像的分辨率提升潜力则大得多,这是由于全息衍射成像方式使更多的样品高频信息得以被传感器采集,虽然传感器的欠采样会导致部分高频信息丢失,但是结合像素超分辨和图像重构算法,能够尽量还原这些高频信息,合成高保真图像,最终系统的SBP可以达到108像素或更多。像素超分辨技术是通过采集多个样品亚像素移动后的图像序列,使用多帧图像的超分辨算法插值合成亚像素超分辨图像[45,49-50]。常用移动样品、倾斜照明[46]、旋转扫描或多波长复用[51]方法获取多帧图像,再用移加法[52]或梯度下降法[18]确定插值的像素值。若能事先获得关于传感器的光敏区二维像素响应函数,合成后的高分辨图像可以更精确。二维像素响应函数的获取需要视情况而定,对于有较大像素尺寸(约5 μm以上)的传感器(一般为CCD或大像素尺寸的CMOS),可以采用扫描显微镜形成直径远小于像素尺寸的扫描点,对传感器像素的感光区域进门扫描,并以信号响应强度为z轴,感光区域为x-y面,形成初步的二维响应函数。其与扫描点的点扩散函数反卷积后可以得到更为精细的二维响应函数。但这一方法难以用于极小像素尺寸的传感器,如高精度的CMOS,因为扫描点与像素大小相当(均在1 μm左右),此时可以利用二维高斯分布做像素响应函数的初步近似(中心位置一致,x-y方向半高宽与像素大小一致)[50]。值得注意的是,像素超分辨不是传统意义上的超分辨成像,只是突破了有限像素数导致的有限采样频率,进而恢复了部分精细特征,得到更加精细的图像。
2021年,南京理工大学左超教授团队[51]利用基于多波长复用的像素超分辨算法,在一块视场面积为29.85 mm2的无透镜片上显微成像系统上,实现了691 nm的线宽分辨率,而对应像素尺寸为1.67 μm,系统SBP约为2.3×108。他们使用了一个超连续谱连续激光器,可用波长范围为430~1 450 nm,并利用声光调制器控制输出波长(450~520~nm),使用直径为100 μm的针孔进行空间滤波,形成了一个用于照明样品的准单色球面波前。利用这套系统,他们不但观测到了单个HeLa细胞的有丝分裂期间不同阶段的细胞形态,还可以在全视场内实现细胞追迹,并定量分析了单个细胞的干质量变化,展示了对传统细胞培养的高通量、长期快速成像的能力。
Zhang等[20]发展了一款超大视场的无透镜片上显微成像系统,FOV达到了18.15 cm2,由于他们开发的这套系统是用于高通量的封装胰岛胶囊分析,对分辨率要求不高,因此图像重建并没有涉及像素超分辨,最终系统的SBP为6×107。Jiang等[53]将图像传感器相对样品倾斜放置,引入了一个沿横向线性增加的相位调制,使系统可以在横向位移的同时完成样品的离焦多高度测量,解决了传统多高度相位检索中精确轴向定位的难题。结合像素超分辨算法,他们在一个120 mm2的视场内实现了690 nm的线宽分辨率,系统SBP超过2.9×108。他们还通过对全视场内1 014个白细胞的自动计数追迹,展示了系统的高通量成像能力。后来,他们又提出了一种分辨率增强的并行编码叠层高通量成像技术[21],采用了类似散射透镜成像[54-55]的思路,将传感器表面的保护玻璃盖换成了自制的无序表面,如图5(a)(彩图见期刊电子版)所示。实现了240 mm2视场内,308 nm的线宽分辨率,SBP约为3×109。他们自制的这一无序表面是由化学刻蚀技术形成亚微米级的相位散射体,并在刻蚀表面印刷了随机分布的碳纳米颗粒后形成的。相位散射体可以将目标相位信息变化转为强度变化进行检测,而碳纳米颗粒可以将大角度的衍射分量重新定向到小角度,这意味着物体的高频信息被调制到光学系统的通频带[56],因此分辨率能够得到进一步增强。利用这一系统,他们在像素尺寸为1.85 μm的传感器上实现了308 nm的线宽分辨率,可以识别样品中缓慢的相位变化,并利用染色切片验证了系统的高通量成像能力,如图5(b)(彩图见期刊电子版)所示。相较于传统显微镜,这一系统可以用更短的时间对大视场的切片样品成像,并且系统结构大大简化,稳定性更高,成本也更低。

图5 无透镜分辨率增强成像系统[21]。(a) 系统结构和其使用的无序表面示意图;(b) 系统对小鼠肾脏切片的高通量成像,并选取三个子区域b1, b2, b3(图中红色框内)的成像结果与使用20 X, 0.75 NA物镜的荧光显微镜成像结果做对比,两者的相似度约为0.75Fig. 5 Resolution enhanced lensless imaging system[21]. (a) Schematic diagram of system design and the disordered surface;(b) high-throughput imaging of mouse kidney slices. Imaging results of three sub-regions b1, b2, b3 (red boxes) are compared with that of the fluorescence microscope using an objective with 20 X and 0.75 NA. The similarity is about 0.75
总的来说,无透镜显微的优缺点都很突出,其最突出的优点在于成功地解耦了分辨率和视场,使其系统SBP提升的方式与传统解决方法截然不同,其可以通过更少的硬件投入,更多的计算辅助,获得同样SBP的成像系统,而且其成本和系统复杂度要远远优于传统的折射显微系统。同时,它也有明显的缺点,就是对成像样品有较高的要求。探测器直接成像模式使得无透镜成像无法有效区分信号光和散射背景光,因此,实际分辨率受信噪比的影响强烈。此外,衍射全息成像的相干成像条件限制也使得无透镜成像的样品厚度有限(<1 mm)[47]。对于不透光,较厚或密集标记的样本难以使用无透镜成像技术进行观察,此外成像的保真度也还有待提升。因此,无透镜成像目前只适用于一些特殊的应用场景,如高通量的快速切片成像,细胞识别与自动计数等。
2.5 几种技术的比较
以上简要回顾了4种高SBP成像技术,虽然它们只是高SBP成像技术的一部分,但却具有相当的代表性。按照大类它们可以分为基于折射光学的有透镜成像技术和基于计算成像的无透镜成像技术。按照小类,对于有透镜的成像技术,前文着重介绍了其中3种大视场高分辨的成像技术[12-14,17,25,31,34],无透镜的成像技术重点介绍了无透镜片上全息显微成像技术[21,46,51,53],并分享了它们的一些最新进展和成果。对以上这4种技术,就分辨率、视场、适用场景和技术难度进行简要的总结,如表1所示。

表1 4类典型的大视场光学显微成像技术参数对比Tab. 1 Comparison of four representative optical microscopy imaging techniques with large FOV
对于大视场物镜成像技术,使用低倍镜固然可以获得更大的视场,但却损失了分辨率,故其视场扩展潜力相对较小。在保持微米级别分辨率的前提下,其已报道实现的最大视场也没有突破1 cm2,这样的物镜虽说可以兼顾点成像和面成像,但是镜头本身的设计制造难度和配套光学系统的设置难度都是极高的。从光学原理出发,使用大视场物镜成像的技术路线在视场的扩大和SBP提升上的应用前景非常有限,并且只在视场中心附近区域可以实现高分辨率。与之相比,曲面探测成像技术更有潜力,就面成像而言,视场直径已可达4 cm。但是曲面探测成像的技术难点除了复杂的光路设计以外,还由于需要设置多个相机,导致体积庞大和标定过程复杂。不过就分辨率而言,曲面探测成像的整体效果要好于大视场物镜成像[14],SBP的上限更高。目前曲面探测成像的发展方向之一是提高成像速度,如RUSH系统可以达到30 frame/s的帧率,但其时间分辨率仍然不能实现成像细胞动作电位的传播——电位信号的上升和衰减在几个毫秒内完成。进一步提升成像帧率需要解决高速数据采集、处理、传输和多相机同步等问题,最终目标可能需要达到每秒上千帧的成像速率。
阵列显微因采用并行化的采集思路,视场拓展空间和难度要低于前面两种。从理论上讲,微透镜阵列的SBP可以随微透镜数量的提升不断提升[15],对于单个微透镜还可以采用高NA设置实现高分辨率。然而在实际应用上,仍然存在很多限制:微透镜阵列的物理尺寸本身就难以做的太大。此外,还要考虑实际传感器的尺寸和数量、中继光学系统的承接能力、对微透镜的数量和尺寸依然有限制。此外,物镜的NA和焦深负相关,高NA设置会使焦深变浅,图像错位的概率也会大大增加,因此,阵列显微单次快照的SBP并不十分突出。但是阵列显微在病理切片成像,活细胞观测等领域已有很好的发展,这是因为:相较于传统的高NA物镜拼接成像的方式,阵列显微的单次成像面积更大,所以图像采集次数更少,成像时间更短,便于实现快速大规模成像;其次,切片样品薄而平整的特点非常适合阵列显微;另外,阵列显微已经发展出多色成像功能,可以快速对切片样品实现多色成像或光谱成像[40],改善了早期只能单色成像的缺点。已经有研究人员对阵列显微和传统的共聚焦显微镜结合进行了初步探索[57],有望实现两种成像方式的优势结合。
相对而言,无透镜成像系统非常简洁,多数元件都来自成熟的商业化产品,另外视场的扩展空间也很大,可以多个芯片并行成像而无需扫描[56],因此它可以在一个成本相对低廉的小型化平台上实现大视场高分辨成像。虽然只适用于特定范围的样品,无法对活体目标等直接成像,但是在细胞计数,细胞示踪和染色切片成像等领域,无透镜成像还是展现了极好的应用前景。目前无透镜成像的发展主要有两个方向:一是分辨率提升,目前的成像分辨率达不到理想衍射极限,这主要受光源的相干性和传感器结构设计等的影响,这可通过选择相干性较好的激光光源、多角度频移照明和数字解卷积等方法改善;二是成像结果保真度有待提高,这是由于无透镜成像的实际成像过程会受到多种环境因素影响,实际成像模型与理论模型存在偏差,使得计算重构出的结果和基于透镜成像的结果存在差异,为改善这一问题,深度学习已经被大量引入,多种基于深度学习的无透镜成像得到发展,并有效降低了对实际成像过程精确建模的需求,图像的保真度有望得到进一步提升。此外还有其他几个方向有待发展,如快速动态全视场无透镜成像,离焦距离精确测定的无透镜层析成像等。
3 前景与挑战
3.1 深度成像
正常的生物样本都具有一定的厚度,不同深度处的生物组织之间的相互联系也是生物研究感兴趣的重要内容,利用光学显微技术实现生物样本的深度成像可以帮助人们有效获取三维组织和器官的生理信息。由于光在生物组织中存在散射和吸收效应[58-59],导致光学显微在正常生物组织中的成像深度存在一个软极限(约1 mm),限制了成像深度的进一步提高。但是在生物研究领域,许多感兴趣目标所处深度均超过1 mm。例如在脑科学研究中,哺乳动物的大脑皮层下数个毫米内有丰富的神经元和毛细血管分布,对神经元活动的研究有助于理解大脑功能实现的原理,而对脑部血管的精确成像能够对一些脑部疾病进行辅助诊断和病因分析,如阿尔茨海默[60]和肿瘤[61-62]等。此外,在大脑内部更深处还有许多其他重要的部分,如负责记忆的海马体和负责激素调节的下丘脑,垂体等,对它们的成像需要现有的光学显微镜在成像深度上取得更多的进步[63]。因此若能实现成像深度的进一步提升,则有望在以脑科学研究为代表的诸多生物研究领域取得更多进展。
传统的三维成像方法是利用层切技术,即通过机械清除[64-65],或者激光消融[66]等,使较厚的生物组织实现逐层的光学显微成像,再通过后期处理实现三维图像恢复,这一点和利用机械扫描方法实现二维大视场拼接成像在思路上是一致的。后来开发出的一系列组织光透明方法[67-69]可以改变生物组织的折射率分布,使其分布更加均匀,从而降低生物组织的高散射特性,增强光在组织中的穿透深度。这一技术目前已应用在皮下微血管成像[70]、神经系统成像[71-73]等领域。随着基于近红外II区波段的显微成像技术的发展,利用近红外II区在生物组织内低吸收和低散射特性的共聚焦[74]和多光子技术[75-79]均实现了光学成像软极限的突破,并在活体成像领域取得了丰富的成果。
对于本文提到的4种技术,实现深度成像的适用技术则各不相同。对于大视场物镜成像系统,使用传统的层切技术实现三维成像面临新的问题:由于传统的层切技术要求形成均匀厚度的薄切片,因此切片的面积往往很小,可能需要多张切片才能使大视场物镜的FOV得到有效利用[80]。一个可行的思路是利用光片显微的光学层切能力[24,81-82],通过合理的照明物镜选型,实现大视场物镜全FOV内的均匀照明。这一思路同样适用于曲面探测成像技术。这一技术路线有一个明显的优势:由于光片的瑞利长度和厚度正相关,实现毫米视场的光片照明对应的光片厚度很容易达到10 μm以上[82],但是大视场物镜由于大入瞳直径和长工作距离的特点,其焦深也可达到数个微米[6],因此大视场物镜成像和曲面探测成像对厚光片的离焦背景具有更好的鲁棒性。此外,由于大视场物镜具有相对更长的工作距离,与光片技术和组织透明技术结合后,相对于传统的光片成像技术,有可能实现更大的成像深度。而基于近红外II区激发的共聚焦或多光子大视场物镜成像技术可能是个有前景的方向,其可以兼顾大视场和大深度成像,只是在成像速度和分辨率上需要做出一定的取舍。对于阵列显微和无透镜显微,由于只是用于对较薄的样品进行成像,若要实现深度成像,则还是需要通过多次切片成像。
3.2 超分辨成像
前面提到的高SBP显微成像仪的分辨率均受衍射极限的限制,若是可以发展一种可以在大FOV的基础上,实现亚衍射极限分辨率的超分辨成像系统,则可以为探索生物大分子和整体细胞/组织功能之间的联系提供重要思路[1,83-84]。这是因为,对于生命科学而言,发展一类具有大视场超分辨成像能力的显微成像技术具有重要意义。一般来说,生物样本的活体原位观测最为客观,最能反映生物组织内最真实的场景。例如,活体器官中的诸多细胞构成了一个精密的微观世界,细胞之间、细胞和细胞器之间的物质交换、相互作用和迁移等在各种生理现象中发挥着重要作用[85]。而体外观察很难去重建一个具有众多生理信号和完整周边组织的环境,因此所观测到的动态过程也非自然状态下的,这一点在骆利群教授课题组[86]近期的果蝇神经发育实验中得到进一步的证实。然而,观测这些亚细胞结构或信号大分子需要具有超分辨成像能力的显微系统,传统的超分辨成像技术是以牺牲单次成像通量为代价的,完成具有多个细胞的较大视场的超分辨成像需要很长时间,其时间分辨率不足以解析组织内的相互作用和动态过程,影响了生命科学的进一步发展。因此,有必要发展一类不仅可以同时对多个细胞成像且具备亚细胞甚至单分子级别分辨率的大视场的超分辨成像显微成像系统,它在时间分辨率上的提升有望帮助生命科学领域获取新的成果。
常用的超分辨技术包括基于点扫描的受激发射损耗[87](Stimulated Emission Depletion,STED),基于单分子定位(Single-Molecule Localization Microscopy,SMLM)的随机光学重构显微[88](Stochastic Reconstruction Microscopy,STORM)、光激活定位显微[89](PhotoActivated Localization Microscopy,PALM)和结构光照明技术[90](Structured Illumination Microscopy,SIM)等,对于可以实现单分子分辨率(10到100 nm)的超分辨技术,其成像视场多在10 μm×10 μm到50 μm×50 μm之间,这一视场只能覆盖两三个小细胞或大的细胞的一部分,无法实现高通量成像。
目前原理上可适用于大视场成像的超分辨技术主要集中在SMLM和SIM两类,而STED受限于点扫描模式,用于大视场成像时速度太慢,一般不被考虑。近年来,大视场的超分辨成像技术主要有以下几种实现路线:一类是解耦照明和检测光路,包括基于光子芯片的纳米显微镜技术[91-93]和基于光片显微的超分辨技术[81,94-95];二是在传统的宽场显微成像的基础上改进照明模式实现大视场超分辨成像[96-99]。这两种技术路线目前均能够使FOV突破100 μm × 100 μm,且分辨率优于100 nm,SBP可以达到107以上。其中,光子芯片是利用全内反射实现均匀照明,主要用于薄切片样品成像,目前使用低倍率高NA的商业显微物镜,最大成像视场可以达到毫米级别,将来有望和大视场物镜或微透镜阵列结合使用。而基于光片显微技术单帧成像视场相对较小,光片的瑞利长度可以表达为2λ/πNA2,其中λ为照明波长,NA为照明物镜的数值孔径。因为照明物镜的NA难以降低,对于0.06>NA>0.02的照明物镜,通常可以覆盖50~500 μm的FOV(λ=488 nm),再考虑到生物组织内散射对光片的影响,实际FOV会更小。因此目前借助光片显微实现超分辨成像的,主要有晶格光片+SIM/PALM的模式[94],或者和宽场成像类似,结合膨胀显微技术[100]和低倍率物镜实现超分辨成像。其中膨胀显微是近几年的新兴技术,其利用聚丙烯酸水凝胶等化学物质吸水膨胀的方法实现生物样品各向同性的物理放大,从而揭示样品的纳米信息,但系统并未突破衍射极限,这一点和常见的超分辨技术并不相同。目前4倍的膨胀技术已经十分成熟,可以和多种显微成像方式结合,并成功应用于一系列动物模型,如小鼠[101],斑马鱼[102]和果蝇[103],因此膨胀显微和前文提到的诸多高SBP显微成像仪的结合是实现大视场超分辨成像的一个可能解决方案。至于基于照明模式改进方法实现的大视场超分辨,目前实现的成像视场在100 μm到200 μm之间,仍然面临的一些技术问题限制了其视场的进一步扩大。这些问题包括视场内照明的均匀性问题,样品表面散斑干扰问题,以及大功率激光照明对物镜涂层可能的损伤问题等。随着这些问题的逐步解决,其与大视场物镜和曲面探测结合将会是个有前景的方向。
4 结束语
综上所述,高SBP显微成像仪的发展路线多样,在性能上也各自取得了很好的突破。基于透镜成像的3种系统实现SBP的突破相对更复杂,成本更高,但成像的保真度更高,应用场景更广;而基于无透镜计算成像的片上显微实现SBP的突破更简单、更直接、对算法和传感器技术进步的依赖更强,但是其分辨率和成像保真度均有待进一步提升,应用场景相对受限。目前,高SBP显微成像仪多用于宽场成像,其与相对成熟的各类成像模态(双光子,超分辨等)、制样技术(组织光透明、层切、膨胀等)的合理搭配,将会使它的应用场景得到有力拓展,文中也介绍了一些成功的实践案例。除了以上提到的4类光学显微成像技术外,光学相干层析(Optical Coherent Tomography, OCT)、光声显微成像等也在大视场成像领域取得了很好的成果[104-108],其成像原理虽有差异但实现大视场显微成像的方法相似——多次扫描与应用高SBP成像物镜等。目前大视场光学显微成像技术仍普遍面临成像帧率低这一瓶颈,但随着传感器性能和计算机技术的进步,这一问题也必将获得有效解决,其有望为大视场显微生物成像提供更好的工具选项。
