基于多模式切换的高精度电磁炮系统
2023-01-06刘家玮郑力嘉杨钰蕙蔡文聪
陈 楠,刘家玮,郑力嘉,杨钰蕙,蔡文聪,彭 力,2
(1. 华南师范大学 物理与电信工程学院,广东 广州 510006;2. 华南师范大学 (清远)科技创新研究院有限公司,广东 清远 511517)
电磁炮作为发展中的高技术兵器,其军事用途十分广泛,是未来一种先进的武器,目前主要运用于发射低速物体.各国研究者对电磁炮的发射优化进行了许多研究,也取得了很多进展,但还存在发射速度不高、攻击模式单一、打击精确度不够等缺陷[1].
本文结合电磁学中“电生磁”的物理原理,利用二维舵机炮台和OpenMV摄像头等部件,设计出了可以满足颜色识别模式和定点击打模式的多模式小型高精度电磁炮,该电磁炮具有制作简单、小型便携、击打精度高等优点.另外,通过对电磁炮发射原理的分析,有利于加深学生对通电螺线管中磁场分布和铁磁物质在磁场中受力情况的理解,该装置亦可作为电磁学相关内容教学的实验演示装置.
1 电磁炮发射原理
1.1 磁动力加速原理
磁阻式线圈炮是利用给线圈通电后,线圈的铁磁磁路的磁阻发生变化,能够吸引铁磁弹体运动的原理,来加速铁磁体弹体,示意图如图 1.它由环绕于炮膛的一系列固定的加速线圈、铁磁体弹体、储能电容以及开关等电路元件组成.按下开关,固定的加速线圈中会有电流通过,线圈内部产生磁场,对弹体产生吸引力,将弹体加速射出.

图1 弹体发射示意图
当线圈通电时,线圈的内外就有了磁感应线分布,其磁势分布为出入口高内部低,线圈外的铁磁弹体被拉向中心.
以如图2所示的模型来分析弹体所获得的能量.在恒定外磁场的作用下, 将其视为一绕弹体中心轴为对称轴的圆电流体[2].弹体在线圈所产生的磁场中的受力分析可简化为通电圆线圈之间的受力问题, 此时弹体线圈模型中的圆电流的方向应该与线圈中的圆电流的方向一致.
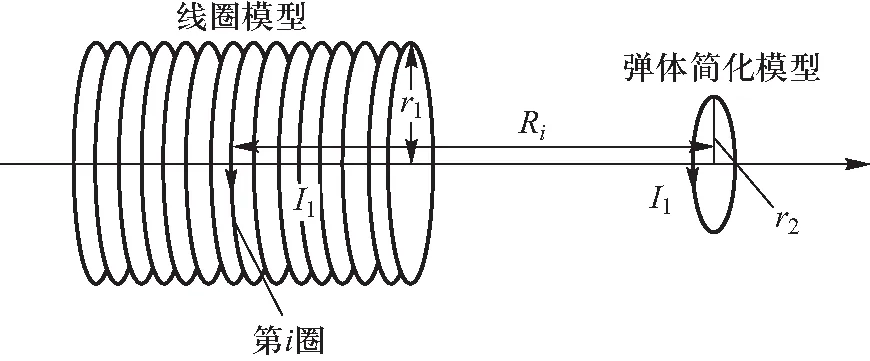
图2 线圈加速原理图
首先考虑线圈(半径为r1) 中第i圈电流环对弹体 (半径为r2) 产生的作用.弹体中心距线圈第i圈电流环中心的距离为Ri, 现考虑第i圈电流环在弹体M2(θ,θ,r2) 处并垂直于I2方向所产生的磁场分量,为简化设M1(r1cosθ,-Ri,r1sinθ)为第i圈电流环上的一点, 如图3所示.

图3 电流方向示意图
由毕奥-萨伐尔定律可得
(1)
其中
第i圈电流环对整个弹体的作用力可用下式得到

(2)
弹体由原点运动到线圈时,第i圈电流环对弹体所做的功,或者此时弹体所获得的动能为

(3)
线圈对弹体做的总功为
(4)
所以质量为m的弹体出射速度为
(5)
根据对电磁炮发射原理的理论分析,我们能够得到弹体的出射速度与电流大小(即电容电压)、螺线管长度、磁场强度等有关,且速度大小与电压大小成线性相关.
1.2 理论计算与误差分析
该装置所采用的半径为3 mm、质量约为0.9 g的磁性弹体,规格为300匝、半径1 cm、长度为8 cm、电阻为0.3 Ω的绕制线圈. 通过理论计算得到,当电容电压为255 V情况下弹体理论速度为32.75 m/s,在实验中得到实际速度为20.62 m/s,误差为37.0 %.
对理论和实际速度误差进行分析,我们认为有以下2点原因:1)实际发射过程中,电解电容无法完全放电,能量利用率较低;2)在弹体高速射出过程中,存在空气阻力对弹体做负功.
2 装置硬件部分设计
2.1 电磁炮整体设计
该装置主要由控制部分和发射部分构成,控制部分电路包含STM32单片机、可视屏幕、矩阵键盘、充电放电开关、电源,可对电磁炮的模式和击打目标进行选择;发射部分电路包含450 V、1 000 μF电容、线圈、升压模块、舵机和摄像头,接受指令后对目标进行识别和发射位置的调整,进而实现弹丸的发射.装置整体设计3D仿真图和实体图,见图4、图5. 其中,发射部分主要由充电回路和放电回路构成,发射采用三级线圈发射来增大出膛速度,三级发射电路图如6所示.
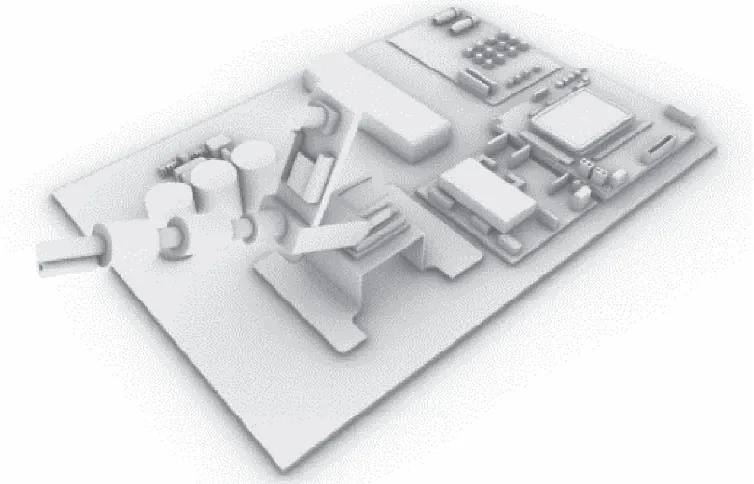
图4 装置3D仿真图
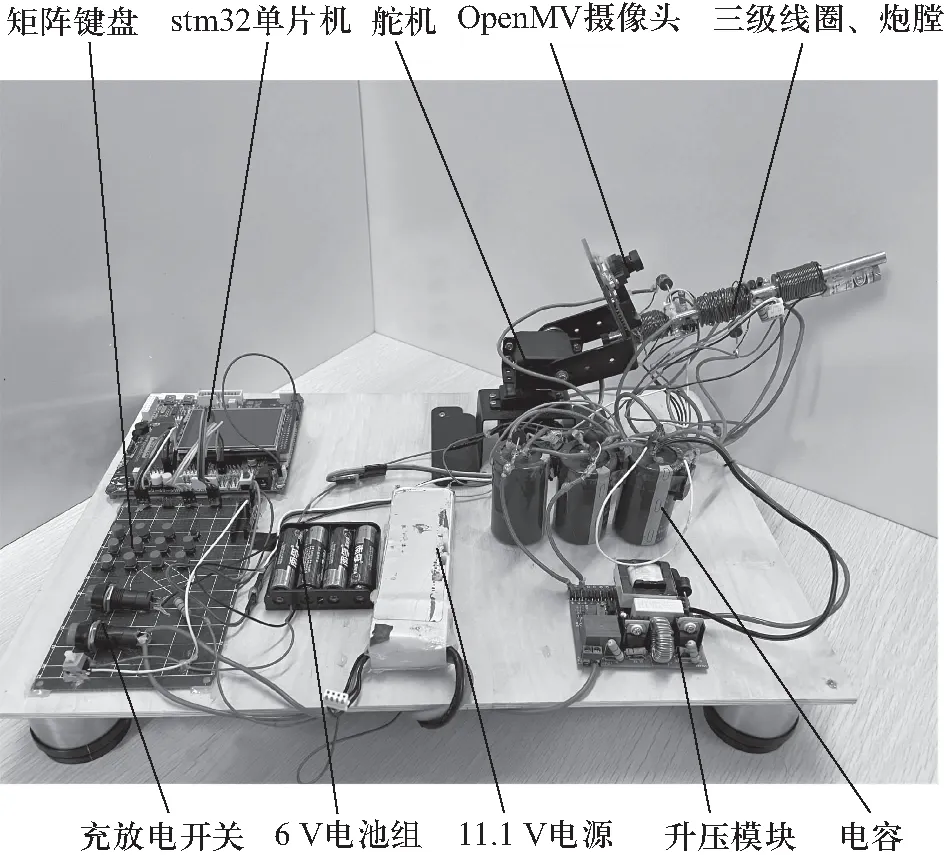
图5 装置实体图
充电回路由11.1 V的直流电源、升压模块、桥式整流二极管、限流电阻、电解电容、控制按钮、STM32单片机构成.充电部分通过编程,让用户按下按钮后,直流电源会经过升压器对电容进行充电.
放电回路由电解电容、线圈、光电开关、控制按钮、可控硅构成.当需要进行发射时,按下控制按钮来控制可控硅开关,使第1个电容开始放电,第1个线圈内产生磁场,弹丸便在磁场的作用下开始运动,当炮弹经过第1个光电开关瞬间,红外传感器发出的红外光线被弹丸遮挡,光敏二极管截至,输出由低电平转为高电平,相当于再一次按下控制开关,第2个电容进行放电,第2个线圈产生磁场.以此反复,直到弹丸经过三级线圈射出炮管[3].
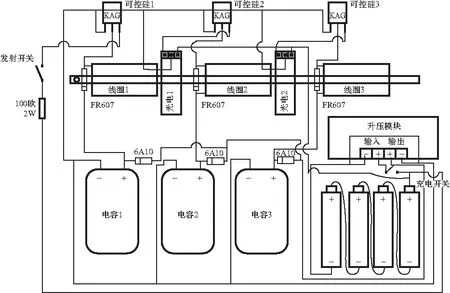
图6 三级发射电路图
2.2 颜色识别处理模块设计
2.2.1 颜色识别硬件设计
实验设计的目标靶定位装置以OpenMV4-H7摄像头为核心,该摄像头由OV7725、MT9V03x全球快门传感器和 FLIR Lepton 1、2和3热传感器组成. 如图7所示.
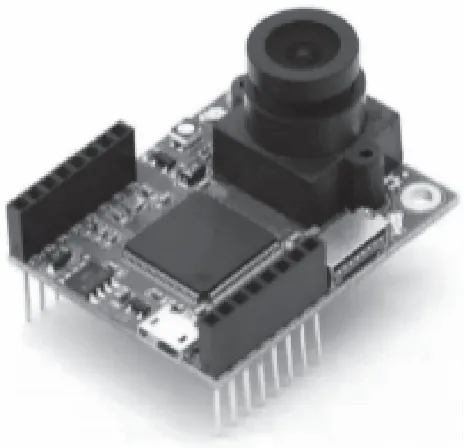
图7 OpenMV4图示
OpenMV 摄像头的识别原理为,在其视野范围内识别并定位出目标环形靶,并将其中心点坐标通过串口传送给 STM32单片机,STM32单片机数据解析成功后,计算出其与图像中心的像素坐标差,作为自动控制算法(PID)[4]调节的输入变量值,并将PID 调节的输出值赋给舵机云台的脉冲宽度(PWM),控制舵机云台转动直至模拟电磁炮炮筒正对目标环形靶中心.
2.2.2 颜色识别追踪程序设计
对于颜色识别追踪程序,我们先让摄像头识别当前环境,得到图像,对图像中颜色进行提取分类处理,再将各个不同颜色的阈值记录在颜色识别追踪程序中,对应特定的颜色.当用户选择需要识别追踪的颜色后,STM32单片机将信息传输给OpenMV,OpenMV提取预处理所设定的颜色阈值,再不断与当前环节颜色进行比对,来捕捉到我们选择的颜色,最后通过与舵机的一体化来控制舵机追踪和瞄准[3].
2.3 旋转瞄准模块设计
本实验采用 DS3115 舵机作为二维舵机炮台系统的核心,该舵机由电路板、驱动马达、减速器与位置检测元件构成. 该舵机云台如图8所示.

图8 DS3115舵机及云台
在对目标进行瞄准的过程中,OpenMV 根据接收到的图像位置输出信号给舵机,舵机内部的马达开始转动,通过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已到达合适位置,通过上述过程实现系统对目标的瞄准过程.
3 主体程序设计
根据我们的设计,主体程序会控制两种模式的选择和切换,控制过程中,通过屏幕来显示,通过矩阵键盘进行选择和输入[5]. 具体流程如图9所示. 在主体程序控制下,我们做到可以实现定点坐标击打和颜色识别追踪2种模式.
1) 定点坐标击打模式下,用户通过键盘输入需要击打位置的X、Y坐标,单片机将信号传输给舵机来控制舵机的旋转角度,待舵机稳定瞄准后,用户按下发射开关完成发射.
2) 颜色识别追踪模式下,用户通过键盘选择需要击打的颜色后,单片机将信号传输给OpenMV摄像头,OpenMV摄像头接收到指令后,将识别所选颜色,再通过与舵机通信实现一体化来控制系统旋转.对颜色识别追踪过程中,通过PID算法[4]不断将指定颜色中心与图像中心进行比较,得到偏移量的反馈后再使舵机进行方向上的调整,最终使颜色中心和图像中心重合,即完成瞄准.瞄准后也为用户按下发射开关发射.
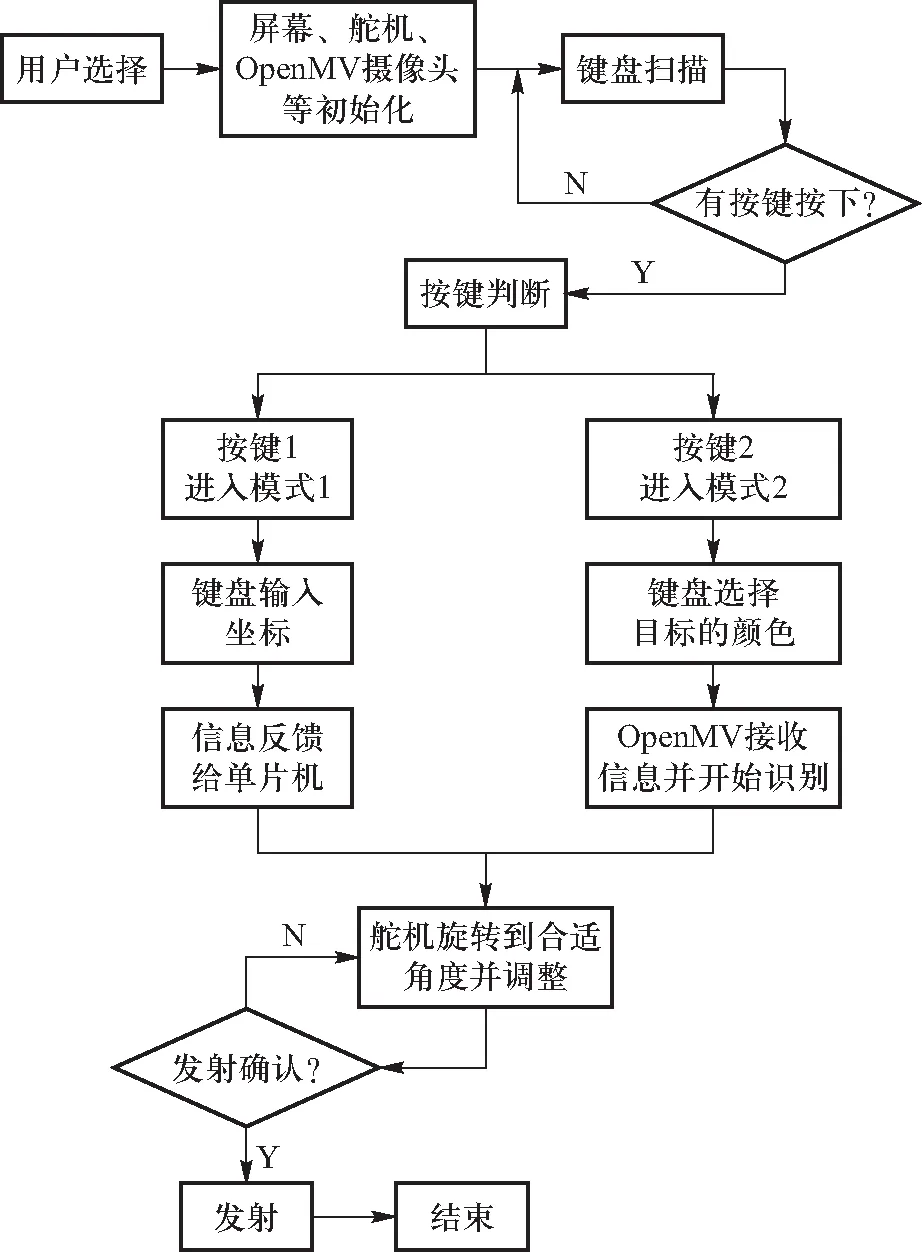
图9 主体程序流程图
4 实验测试与分析
4.1 炮弹发射位置对于电磁炮射程测试
在设计电磁炮过程中,我们多次实验后发现炮弹放置的位置对于电磁炮射程有一定影响,因此本文通过设计实验,改变炮弹发射位置并记录射程,寻找小球最合适的发射位置,示意图如图10.
图10 炮弹在炮管内不同位置3D仿真图
我们从炮管底部向上每隔0.5 mm取一次发射位置,直至弹体因能量不足无法射出时停止取点. 经过多次实验并取平均值,得到图11的相关曲线. 从图中我们可以近似看出图像呈倒V状,在9 mm处射程达到峰值25.57 m.

图11 炮弹在线圈内不同位置射程的变化图
4.2 电磁炮性能分析
4.2.1 稳定性分析
电磁炮的供电电压为11.1 V,经过升压模块升压后的电压达到255 V,舵机的供电电压为6 V,充放电所需时间约为2 s.
颜色识别模式中,若无其他颜色干扰的情况下,电磁炮识别追踪目标颜色,且待舵机稳定所需时间约为2 s;坐标定点击打模式中,输入坐标后,舵机稳定所需时间约为3 s.
4.2.2 电容效率计算
根据实际出射速度20.62 m/s,再利用电容储能计算公式E=0.5CU2和炮弹动能计算公式E=1/2mv2,可计算出电容的平均能量使用效率为0.20 %.
4.2.3 击打准确性分析
对于电磁炮击打准确性的测试在距离目标靶1~1.5 m、1.5~2 m、2~2.5 m、2.5~3 m分别进行测试,在测试中我们随机选择两种模式进行50次击打测试,记录电磁炮每次击中位置与目标圆圆心的距离.
再参考弹道学中一种测量武器精确度的方式——圆形公算误差(CEP)来进行精确度的描述,如图12所示,其中(a)、(b)、(c)、(d)分别为4种击打距离的概率误差图.

图12 概率误差图
对4个概率图分析后发现,当击打距离越近,电磁炮的精度越高,在1~1.5 m的击打距离下,有51%的炮弹打在了半径为0.97 cm的圆内,理想精度为±0.97 cm,另外49 %的炮弹打在了半径为1.35 cm的圆内,总体精度为±1.35 cm.随着击打距离的增加,炮弹击打精度略微下降,但整体仍较为准确.对于击打误差的增加,我们分析是由于距离越近OpenMV对目标点中心识别的精度越高,使舵机更好瞄准目标中心.
5 结束语
本文所提出的电磁炮系统,具有颜色识别与追踪功能和定点精确击打功能,满足了电磁炮在军事使用中的实用性.该电磁炮还可以广泛运用于学科教学,增强学生对电磁场和电路设计方面的知识.
除此之外,该电磁炮系统还有进一步改进的空间,增加与其他模块的互通进一步实现功能多样性,例如可在舵机与炮管下方增加智能车模块,让装置在一定范围内进行移动减少电磁炮位置限制.