一种新能源车辆坡道起步扭矩控制方法
2023-01-06吴光耀周升辉王春生
李 伟,吴光耀,周升辉,王春生
一种新能源车辆坡道起步扭矩控制方法
李 伟,吴光耀,周升辉,王春生
(比亚迪汽车工业有限公司 产品规划及汽车新技术研究院,广东 深圳 518118)
针对目前新能源车辆坡道起步的控制策略效果不佳或者需要增加成本的缺点,文章提到一种新能源车辆坡道起步扭矩控制方法,当整车控制器识别到驾驶员以超过一定的速率释放制动踏板时,提前施加一定的预紧扭矩,此预紧扭矩为该车辆在此道路坡度和制动深度下不产生溜坡现象的最小扭矩;当制动踏板逐步释放时,整车控制器根据制动深度进行目标驱动扭矩的计算,当计算目标驱动扭矩大于预紧扭矩时,驱动扭矩按照计算目标驱动扭矩执行,有效确保了车辆不产生溜坡现象的情况下平稳坡道起步。
新能源汽车;坡道起步;扭矩控制;防溜坡;防冲击
相比传统燃油汽车动力来自于发动机,新能源汽车在怠速起步时动力源主要来自于电机,电机的输出扭矩具有相对速度快和控制精度高的特点[1]。满足车辆坡度起步平稳性能和安全性能要求,对新能源汽车技术的发展具有一定的理论价值和实际工程意义[2]。
在电动汽车怠速起步控制方面,目前已有许多研究。佘建强等电动汽车电动机起步加速控制研究[3],汪贵平等电动汽车起步加速过程的动力学建模和仿真,分别提出了电机转矩和功率控制模型,车速与电流双闭环控制的模型,但文献未讨论控制策略对车辆坡道起步性能所带来的影响[4]。秦大同等纯电动汽车电机与制动器协调起步控制[5]和陈淑江等纯电动汽车坡道自适应起步控制策略,分别从电机与制动器协调控制及电机堵转特性的角度,提出了车辆对坡道自适应起步控制方案,取得了良好的仿真效果,但未进行实车试验的验证[6]。崔海峰等基于扭矩传感器的汽车坡道起步辅助系统[7],王洪亮等基于电子驻车制动系统(Electrical Park Brake, EPB)的汽车坡道起步自动控制技术,他们的思路是增加不同的坡道起步辅助系统,这种方法有效避免了溜车现象的发生,但是辅助系统成本较高,同样是有缺点的[8]。
1 坡道起步性能评价指标
车辆的坡道起步不仅要求安全可靠,而且要求舒适平稳,既不产生明显的溜坡问题也不产生可感知的冲击现象。因此,为了保证车辆坡道起步的安全性和平稳性,本控制方法的分析采用了起步冲击度和溜坡距离作为坡道起步的评价指标[9]。
其中,冲击度是指车辆行驶时的纵向加速度的变化指数。在车联起步过程中,冲击度可以影响车辆运行的顿挫感和平稳性。在实际起步阶段,冲击度越大,起步就会越快,车辆的平稳性就会变差,而且会伴随强烈的顿挫感;而冲击度越小,起步就会相对缓慢,车辆的起步体验就会更加舒适,也会更加平稳。
加速度计算公式为
式中,为计算加速度,m/s2;0为当前时刻车速,km/h;∆t为∆时刻之前车速,km/h;∆等于50 ms。
冲击度计算公式为
式中,为冲击度,m/s3;0为当前时刻计算加速度,m/s2;∆t为∆时刻之前的计算加速度,m/s2;∆等于50 ms。
溜坡距离是指车辆在坡道上怠速无油门起步时向后溜的距离。在理想的情况下,为了保证驾驶车辆的安全性能和舒适性能,溜坡距离应该为零。
当车辆在坡道上怠速起步过程中,行驶阻力主要来自于坡度阻力和滚动阻力的和。当车辆坡道起步时,由于道路的坡度和道路摩擦系数已经确定,所以行驶阻力也是固定的。在此情况下,可以认为车辆的起步是否平稳是电机驱动扭矩与制动器制动扭矩共同作用的结果。若精确控制电机驱动扭矩与制动扭矩的差值在一定范围内,就可以保证车辆的平稳起步,减少车辆起步溜车的风险,保证起步的平稳性和舒适性[10]。
2 坡道起步扭矩控制
本文分析的新能源车辆在结构上取消了离合器,因此,在没有坡道起步辅助设备的情况下其起步的操作一般过程如下:(1)踩下制动踏板,并将变速箱挡位置于驱动挡;(2)右脚迅速由制动踏板转换到加速踏板,用力踩下一定程度后车辆克服起步阻力完成起步[11-12]。
此文的目是车辆在坡道起步时,通过扭矩控制的方式防止车辆有溜坡的现象产生,并非是在发生溜坡的既定事实后再做的后处理。
如图1和图2所示,当车速≤1 km/h,且有制动深度时,认为车辆已处于停止状态。整车挡位为D挡且车辆所在的道路坡度≥1%,或者整车挡位为R挡且车辆所在的道路坡度≤-1%时,汽车整车控制器(Vehicle Control Unit, VCU)识别整车有坡道爬坡起步的工况。
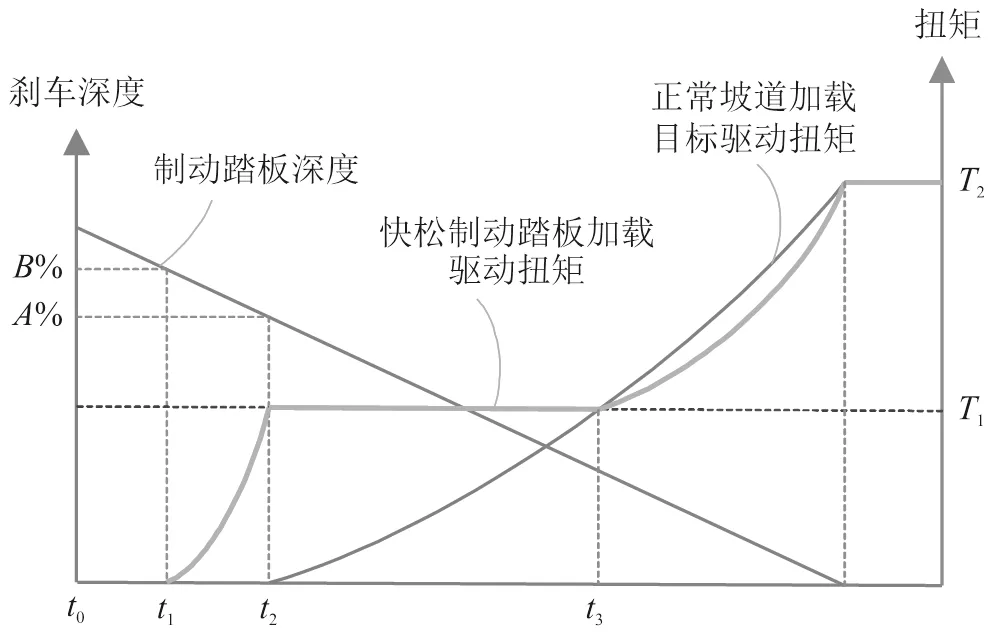
图1 坡道起步扭矩控制示意图
车辆起步时,驾驶员在踩制动踏板完成挂挡动作后,须会松开制动踏板,而整车的驱动扭矩加载有一定延时,如果松开速度过快,就会造成加载的扭矩不足以弥补失去的机械制动力,从而导致车辆的溜坡现象发生。
在驾驶员逐步松开制动踏板起步时,VCU计算制动踏板的释放速率,释放速率等于单位时间内的制动踏板开度变化百分比,当连续三个监测周期识别到制动踏板的释放速率大于阈值,VCU则判定驾驶员的制动踏板释放速度较快,会在三个周期监测完成后1时刻施加预紧扭矩1。该预紧扭矩1的大小由车重和道路坡度查表确定,为该车辆在该坡道下所不溜坡的最小扭矩。预紧扭矩1由标定获取,需要涵盖该车辆在不同坡度下不溜坡的最小扭矩。同样,由驾驶员松开制动踏板的速率查表确定预紧扭矩1扭矩的加载斜率,该斜率严格通过标定获取,既能抵消松开制动踏板失去的机械制动力,又不至于加载扭矩太快对电机产生冲击。
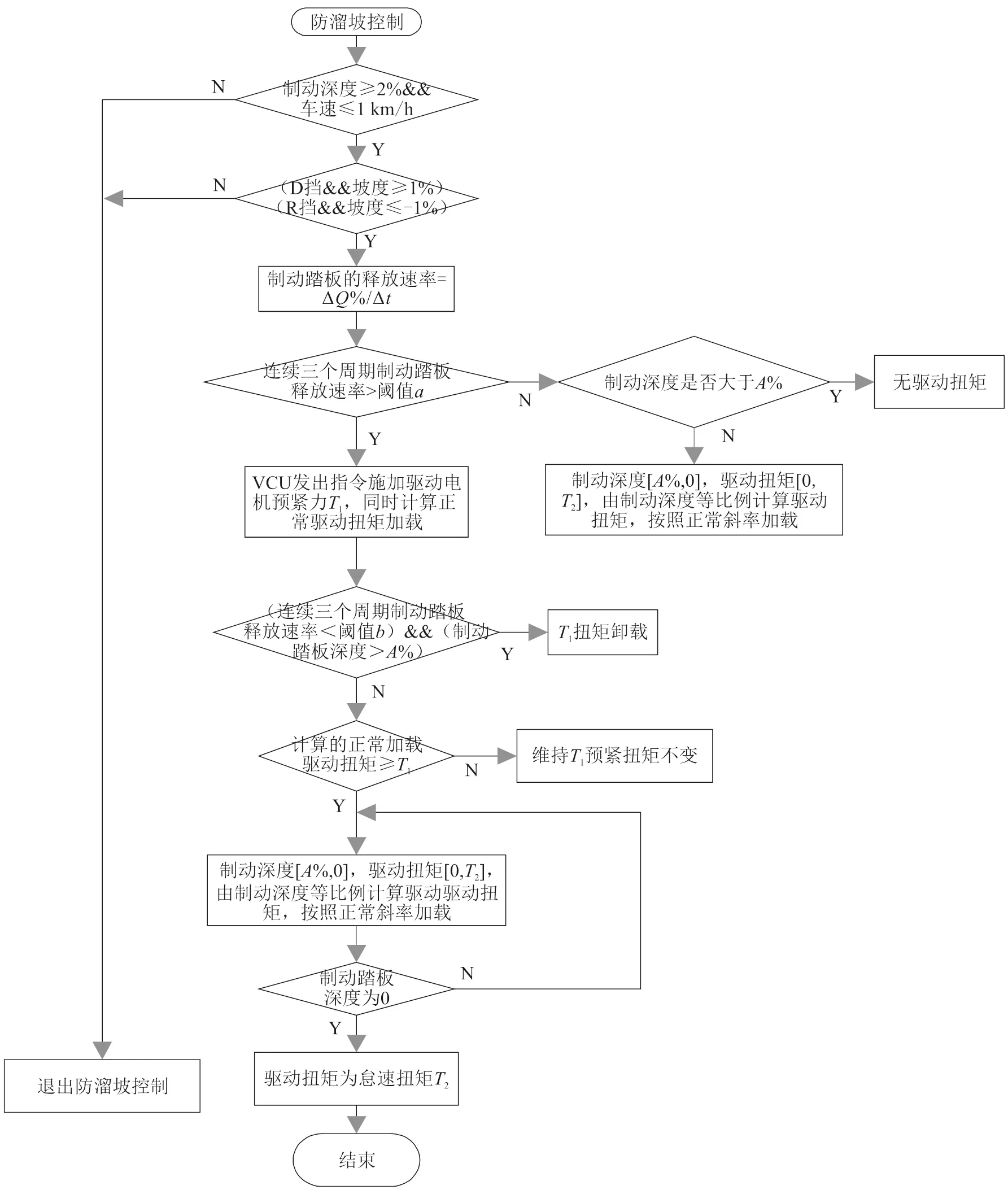
图2 防溜坡坡道起步扭矩控制流程图
如连续三个周期监测制动踏板释放速率小于阈值且制动踏板的深度大于%时,VCU判定制动深度较大,产生的液压制动力足以克服车重不产生溜坡,所以此时VCU不再施加驱动扭矩,以防止驱动扭矩与液压制动力相互抵消。当连续三个周期监测制动踏板释放速率小于阈值且制动踏板深度不大于%时,VCU判定驾驶员没有继续踩制动踏板的意愿,则不再施加快松制动踏板加载的预紧扭矩1,因为按照正常斜率增加的驱动扭矩足以弥补缓松制动踏板失去的液压制动力。
如图1所示,正常坡道加载目标驱动扭矩的计算方法为当制动深度大于%时,正常坡道加载目标驱动扭矩为0;当制动深度不大于%时,目标驱动扭矩的计算为制动深度为%时,目标驱动扭矩为0;制动深度为0%时,目标驱动扭矩为怠速驱动扭矩2,制动深度介于0%和%之间时,等比例计算目标驱动扭矩,此扭矩即为正常加载目标驱动扭矩。
当连续三个周期监测到制动踏板释放速率小于阈值且制动踏板深度大于%时,VCU判定为驾驶员并没有释放制动踏板进行起步的意图,则预紧扭矩1会迅速进行卸载释放,以防止电机的堵转损坏电机。
持续松开制动踏板,当正常目标扭矩计算加载到1之前,整车的驱动扭矩仍然是预紧扭矩1保持不变。当达到1时,则驱动扭矩按照正常目标驱动扭矩线进行加载,车辆则可顺利起步。
当驾驶员完全释放制动踏板,则制动深度为0,在无油门开度信号的情况下整车的驱动扭矩则为怠速扭矩2;有油门信号时按照正常的逻辑计算油门扭矩,车辆顺利坡道起步。
3 整车验证
为验证坡道起步扭矩控制方法的的效果,以某混动乘用车为验证对象,其整车的部分技术参数如表1所示。
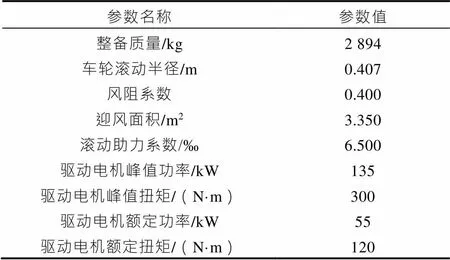
表1 测试车辆技术参数
为充分验证车辆的坡道起步性能,分别在坡度为10%~20%的坡道上测试;同时每个坡道上驾驶员又以较快和正常速率释放制动踏板,记录整车的冲击度和溜坡距离,详细测试数据如图3—图6所示。
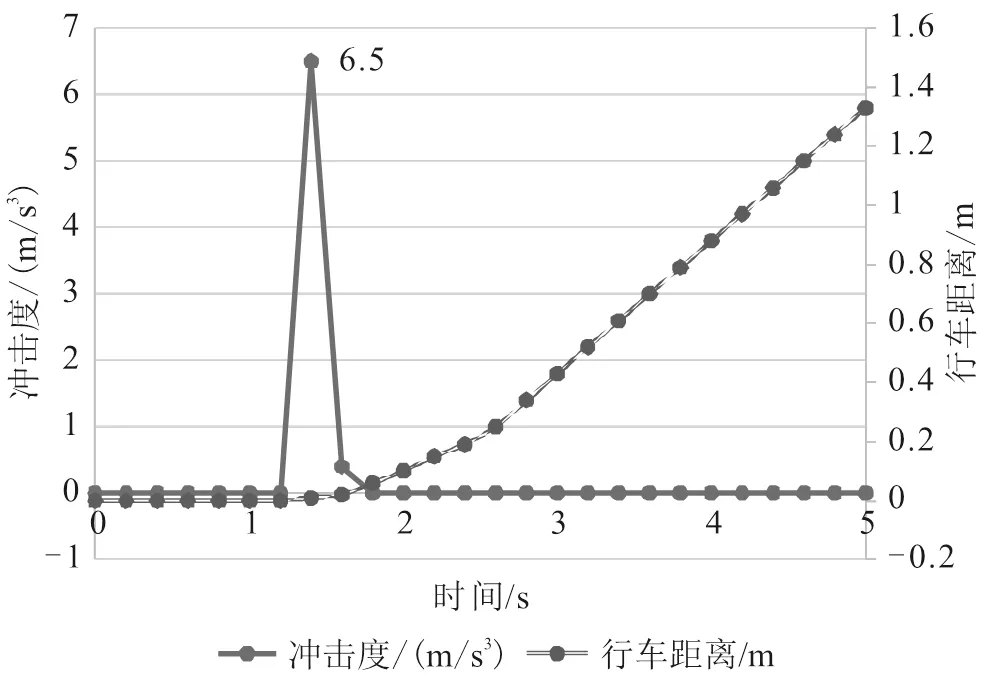
图3 10%坡道正常释放制动踏板
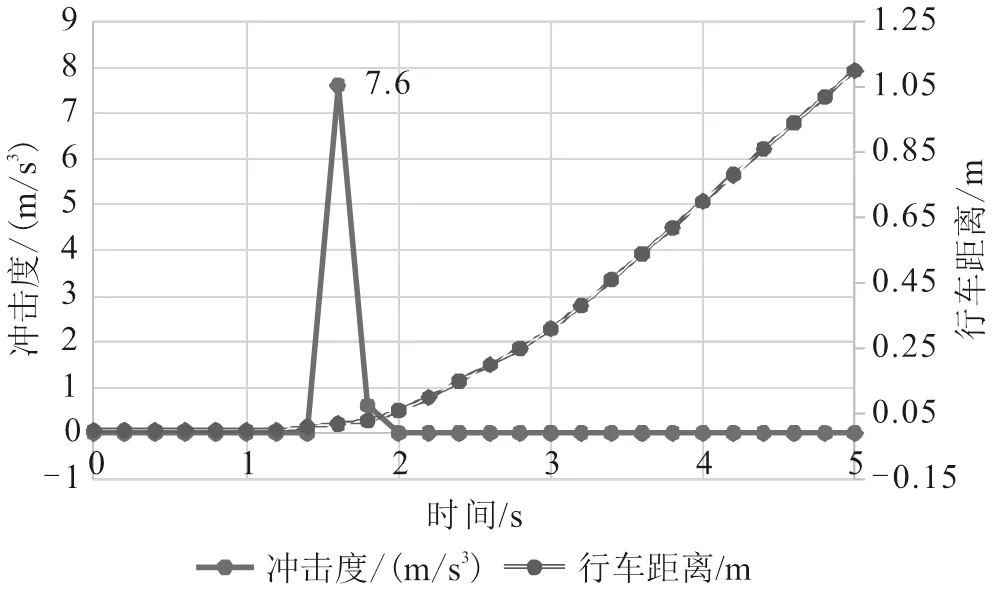
图4 20%坡道正常释放制动踏板
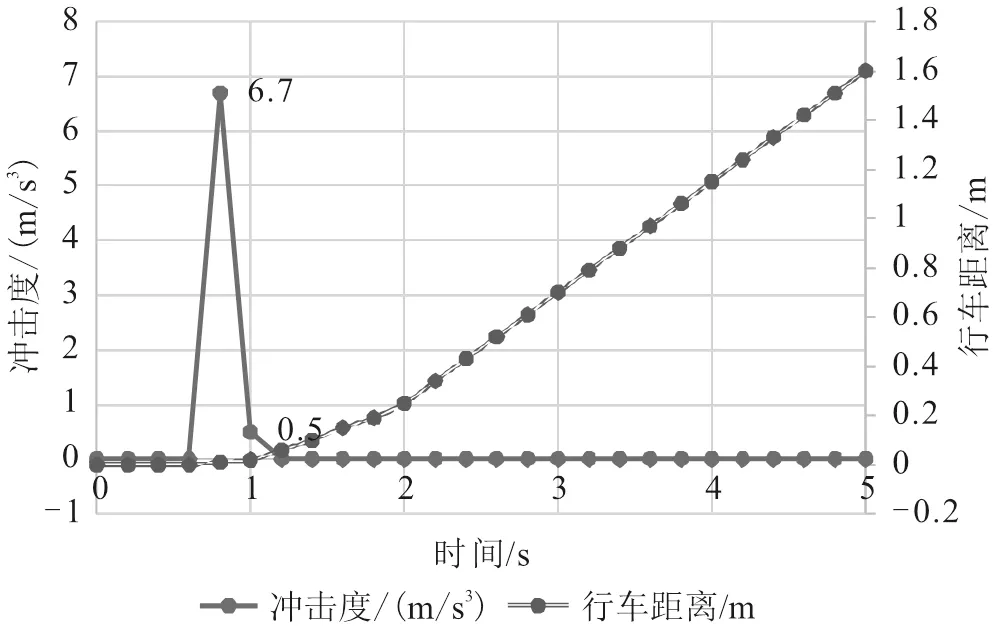
图5 10%坡道较快释放制动踏板
由结果可以看出,10%坡度路况下测试,正常速率释放制动踏板下产生的最大冲击度为6.5 m/s3,行车距离不会产生负的情况,也就是不会产生溜坡的现象;较快速率释放制动踏板下产生的最大冲击度为6.7 m/s3,也不会产生溜坡的现象;20%坡度路况下测试,正常速率释放制动踏板下产生的最大冲击度为7.6 m/s3,不会产生溜坡的现象;较快速率释放制动踏板下产生的冲击度最大为7.9 m/s3,同样不会产生溜坡的现象。
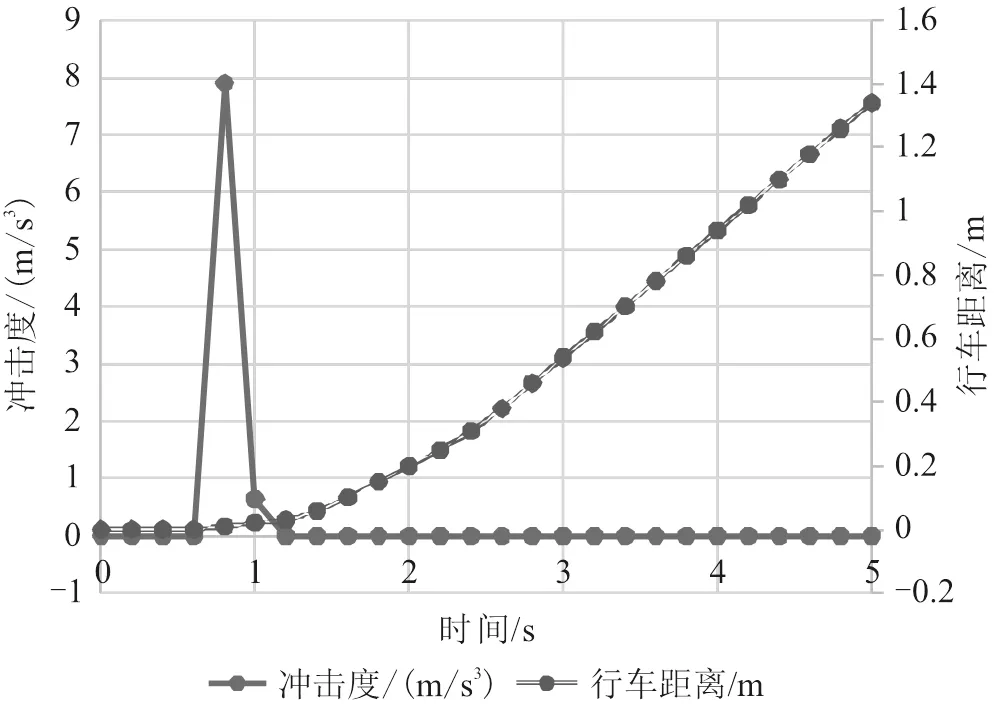
图6 20%坡道较快释放制动踏板
在制定的坡道起步扭矩控制方法下,可以完全解决坡道起步不溜车的问题。而且起步的冲击度均在8 m/s3之内,小于德国推荐值10 m/s3,远小于我国的推荐值17.64 m/s3,达到了车辆坡度起步平稳性能和安全性能要求[13]。
4 结论
本文提出了一种新能源车辆坡道起步扭矩控制方法,当驾驶员以超过一定的速率释放制动踏板时,整车控制器会提前施加一定的预紧扭矩,此预紧扭矩为该车辆在此道路坡度和制动深度下不产生溜坡现象的最小扭矩;当制动踏板将近完全释放时,整车控制器根据制动深度进行目标驱动扭矩的计算,当计算目标驱动扭矩大于预紧扭矩时,驱动扭矩按照计算目标驱动扭矩执行。通过实车验证,在不同的坡道上以不同的速率释放制动踏板均取得了很好的效果,保证了车辆在不溜坡的情况下平顺起步。
[1] 澎湃.基于EPB的中/重型货车坡道起步控制研究[D].南京:南京理工大学,2018.
[2] 陈俊武.基于力矩信号的汽车坡道起步性能分析[J].自动化应用,2019(2):128-129.
[3] 蒋学锋.重型商用车AMT坡道起步系统研究与开发[D].武汉:华中科技大学,2011.
[4] 李贵强,吴正斌,姜帆,等.基于驱动电机控制的电动汽车坡道静止保持系统[J].北京理工大学学报,2022, 40(9):942-947.
[5] 赵迁,杨良会,邢杰,等.动力换挡两档变速器的整车搭载与动力性试验[J].车辆与动力技术,2022(2):54- 56.
[6] 刘俊希.汽车防坡道溜车装置的不同设计方案比较分析[J].科技创新与应用,2017(30):111-113.
[7] 王洪亮,谷文豪,张庆渴,等.汽车坡起中的Bang-Bang控制研究[J].北京理工大学学报,2017,37(1):46-49.
[8] 王洪亮,谷文豪,张庆渴,等.基于PID控制的坡道起步控制仿真与试验研究[J].汽车工程,2017,39(4):480- 484.
[9] 周陆杰.某无人驾驶轻型履带车坡道起步研究[D].北京:北京理工大学,2017.
[10] 吴兵显,周萍.基于纯电动汽车的坡道起步控制策略研究[J].农业装备与车辆工程,2019,57(5):37-40.
[11] 谷文豪.基于气压EPB的汽车坡道起步控制研究[D].南京:南京理工大学,2017.
[12] 朱园园.纯电动汽车自动起步控制策略研究[D].长沙:湖南大学,2017.
[13] 宋勇道.基于两档双离合器自动变速器的纯电动汽车驱动与换挡控制技术研究[D].长春:吉林大学, 2013.
A Torque Control Method for Ramp Starting of New Energy Vehicles
LI Wei, WU Guangyao, ZHOU Shenghui, WANG Chunsheng
( Product Planning and New Technology Research Institute, BYD Auto Industry Company Limited, Shenzhen 518118, China )
In view of the shortcomings of the current control strategy of new energy vehicles on ramp starting that has poor effect or needs to increase costs, this paper refers to a torque control method for new energy vehicles on ramp starting. When the vehicle controller recognizes that the driver releases the brake pedal at a rate exceeding a certain rate, it applies a certain pre tightening torque in advance. This pre tightening torque is the minimum torque that the vehicle will not slide on this road slope and braking depth. When the brake pedal is released gradually, the vehicle controller calculates the target driving torque according to the braking depth. When the calculated target driving torque is greater than the pre tightening torque, the driving torque is executed according to the calculated target driving torque, effectively ensuring that the vehicle can start smoothly on the ramp without slope slipping.
New energy vehicles; Ramp start; Torque control; Anti slide slope; Anti impact
U467
A
1671-7988(2022)23-09-05
U467
A
1671-7988(2022)23-09-05
10.16638/j.cnki.1671-7988.2022.024.002
李伟(1985—),男,硕士,工程师,研究方向为VCU、ECU等新能源系统研发品质管控,E-mail:2503 43990@qq.com。