振动信号提取方式对动平衡精度的影响
2023-01-06张佳伟田国红
张佳伟,田国红
振动信号提取方式对动平衡精度的影响
张佳伟,田国红
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121000)
在转子动平衡系统中,振动信号基频幅值和相位的提取对计算转子不平衡量的精准度起着至关重要的作用。针对传统方法提取振动信号幅值相位导致计算的转子不平衡量出现较大误差的问题,提出了一种峰值差法对转子振动信号幅值相位进行提取。将峰值差法、相关性法、快速傅里叶变换(FFT)法分别编写成LabView转子动平衡振动信号幅值相位提取程序,进行转子动平衡实验,对三种方法计算出的转子不平衡量进行分析对比。实验结果表明:与相关性法和FFT法相比,采用峰值差法作为转子动平衡系统提取振动信号基频幅值相位的程序,计算出的转子不平衡量误差更小,更加精准。
振动信号提取;峰值差法;相关性法;快速傅里叶变换(FFT)法;LabView;动平衡精度
信号作为信息的载体,包含了各式各样的特征信息。人们为了从实际测量的信号中获得有用的特征信息,必须采用有效的振动信号处理方法[1]。在汽车电机转子的动平衡测试中,实际采集到的转子振动信号是由掺杂多种杂质信号组成的混合信号,而需要用到的信号只是与转速同频的基频信号。转子动平衡的过程主要包括:信号的采集、振动信号基频幅值相位的提取、转子不平衡量的计算。其中,振动信号基频幅值相位的提取是转子动平衡最关键的技术之一,它的提取精准程度直接关乎着转子不平衡量计算结果的好坏[2-3]。目前转子动平衡领域中,用到的振动信号基频提取方法大多为相关性法[4]和快速傅里叶变换(Fast Fourier Transform, FFT)法[5]。
本文首先对相关性法和FFT法的原理进行了说明,并结合LabView分别编写了相关性法和FFT法的振动信号基频幅值相位提取程序,并将该程序作为转子动平衡系统的数据处理模块。然后结合LabView编程软件,提出一种峰值差法,作为振动信号基频幅值相位的处理方式,并编写成程序。最后,进行转子动平衡实验,分别用三种信号提取程序进行转子不平衡量的检测,并根据所计算的不平衡量数据进行分析、对比三种方法的优劣。
1 相关性法和FFT法提取振动信号幅值相位原理及程序
1.1 相关性法提取基频信号幅值相位及程序
转子振动信号的基频幅值和相位的提取是动平衡的基础,同时它也是动平衡校正最为关键的一步。转子在进行动平衡时,传感器采集的实际信号是含有多种杂质的混合信号,而我们实际需要的,是与转子同频率、同转速的基频信号。互相关处理能够消除信号干扰的影响,从混合信号中提取得到特定频率信号的幅值和相位。以下为互相关法提取振动信号的理论:
设实际所测得的振动信号表达式为
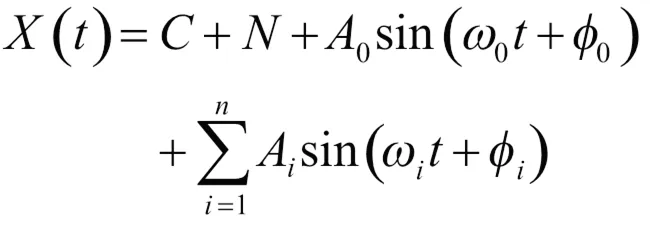
式中,为信号的直流成分;为随机噪声;0为基频信号幅值;0为基频信号相位;0为基频对应的角速度;A为谐波信号的幅值;为谐波信号的相位;ω为基频对应的角速度。
式(1)表示实际测试所获得的振动信号。
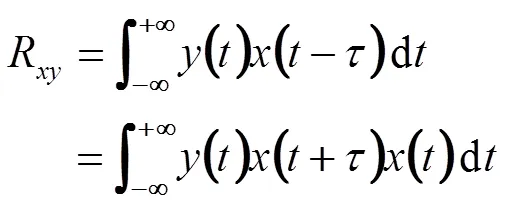
设()、()为实能量信号,其互相关函数为
设与转子相同频率的正弦信号和余弦信号分别为
()=sin() (3)
()=cos() (4)
将两个信号分别与振动信号()进行互相关计算,得


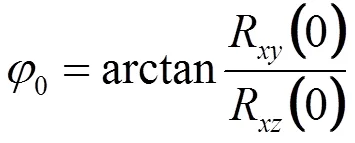
继续转换所得的两个公式,即可得信号的幅值和相位公式为

结合LabView图形化编程软件,对互相关法提取振动信号幅值相位进行编程,如图1所示。
1.2 FFT法提取振动信号的幅值相位及程序
FFT是运用离散傅氏变换(Discrete Fourier Transform, DFT)的一种快速算法。FFT根据离散傅氏变换的奇、偶、虚、实等相关特性,在离散傅立叶变换的算法的基础上进行改进与优化获得。
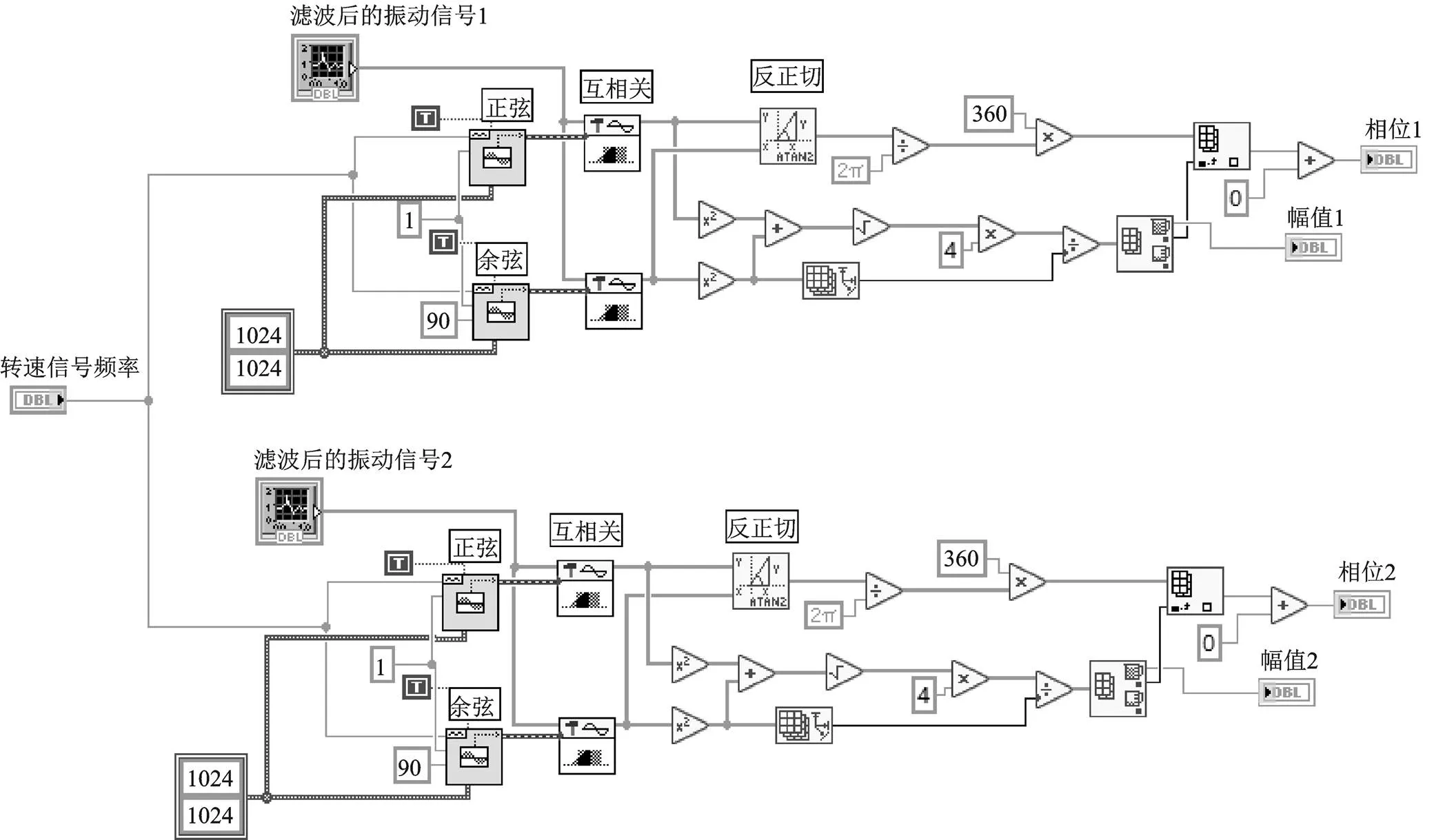
图1 互相关法提取幅值相位程序
在实际的工程和应用中,当对一个振动信号进行分析处理时,最常用的方法是,用键相信号先截取一段所需信号,比如可以截取2N-1个点。若是要将时域信号转换成频域信号,则可以通过直接对这2N-1个点进行FFT变换的方式,提取出该信号的幅值和相位。
结合LabView图形化编程软件,对FFT法提取振动信号幅值相位进行编程,如图2所示。
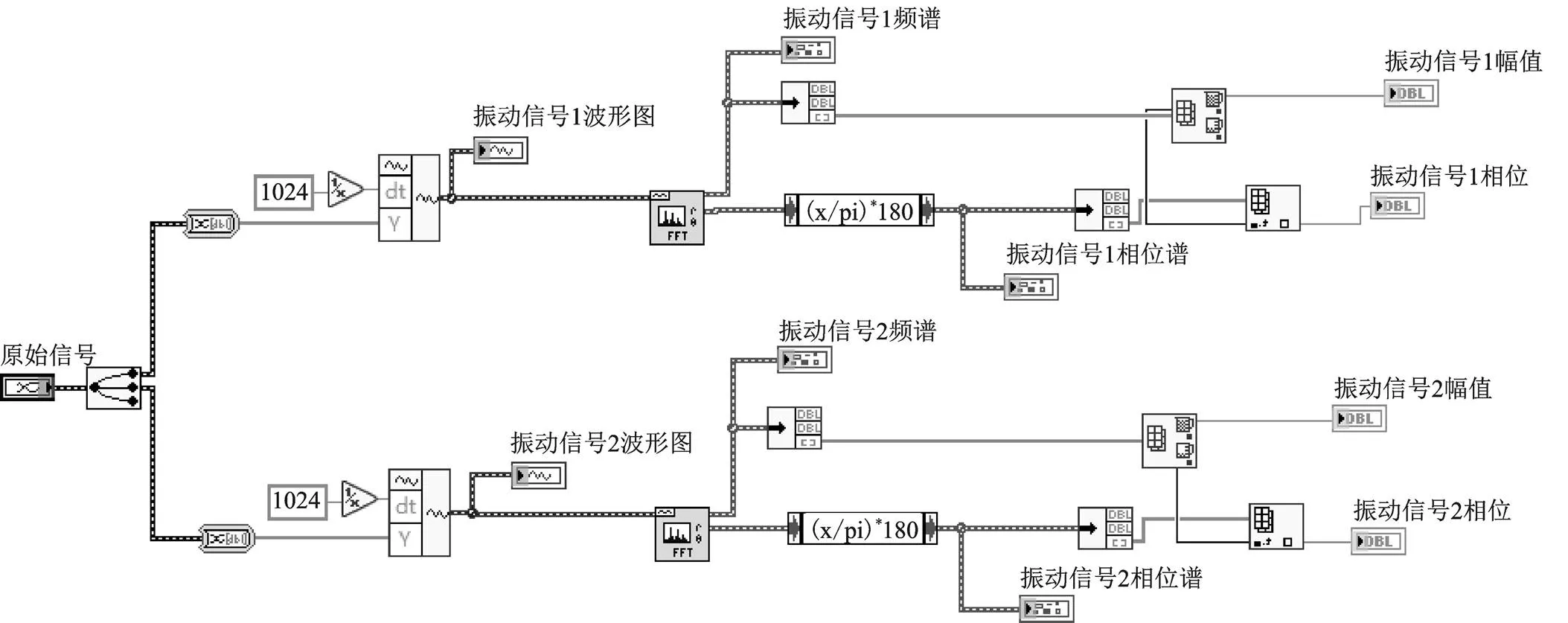
图2 FFT法提取幅值相位程序
2 峰值差法提取振动信号幅值相位
为提高转子动平衡系统精度,提高转子不平衡量检测的精准性,本文提出一种峰值差法对转子的振动信号基频幅值相位进行提取。
峰值差法的原理为对振动信号进行滤波之后,滤波之后的振动信号可用一系列连续的点来表示,LabView可通过特定的波形波峰检测函数,对该波形进行检索,提取出一段时间下的振动信号的幅值及其时间(相对点数位置),通过对各个峰值求和取平均值作为该振动信号的幅值。相位是一个相对量,该方法下的相位为与同时用光电传感器进行采集的转速信号差值。光电传感器采集的转速信号为方波形周期信号,振动信号为正弦信号,通过波形波峰检测函数,检测出转速信号每个上升沿的位置,检测正弦信号波峰位置,由于检测的为同一转子,所以该周期信号与正弦信号的频率一样,理论上转速信号上升沿的位置与正弦信号波峰位置的差值是一定的,在每个正弦信号中,其相邻的波峰与波峰之间的时间间隔构成一个周期,相差角度为360°,一个周期的点数可用后一个波峰时刻的位置点数减去前一个波峰时刻的位置点数,该点数差即为一个周期360°的点数;正弦信号与方波信号的点数差除以一个周期的点数,再乘以360°,即为振动信号的相位。
结合LabView图形化编程软件,对峰值差法提取振动信号幅值相位进行编程,如图3所示。
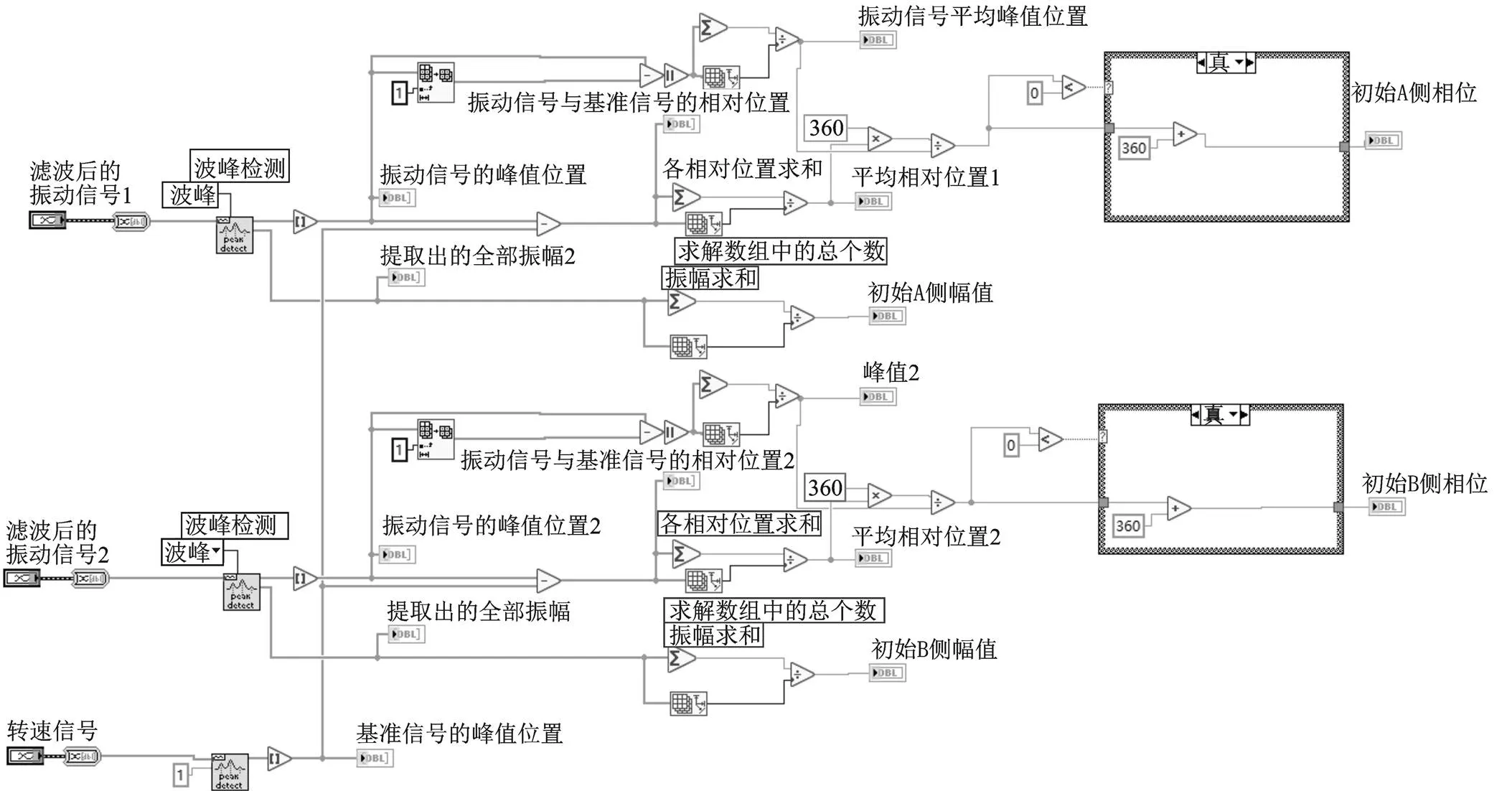
图3 峰值差法提取幅值相位程序
3 转子动平衡实验
3.1 实验要求
实验所用到的相关参数均按照《平衡机的描述检验与评定》(GB/T 4201—2006)的标准进行选取[6]。
(1)转子的要求:转子需使用标准中规定的标准转子,本文所使用的标准转子参数如表1中所示。
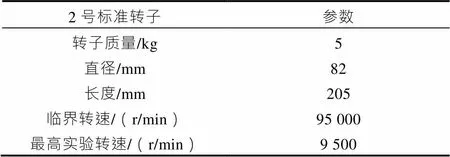
表1 标准转子技术参数
(2)试重的要求:试重质量不能超过标准中规定的质量。
mar=mar(9)
式中,mar为转子的最小可达剩余不平衡量,g.mm;mar为转子最小可达剩余不平衡度,也称动平衡精度等级,g.mm/kg;表示转子的质量,kg。
双面动平衡转子每侧试重质量计算公式为
式中,为转子的每侧试重,g;为转子的半径,mm。
3.2 动平衡计算流程
转子安放简图,如图4所示。

图4 转子安放简图
(1)在无试重的情况下保持转子在规定转速下运动,通过传感器测得、两侧的原始振动信号,该信号为矢量,包含大小与相位,用0、0表示。
(2)取一试重,将该试重放在校正I面上,保持转子在与上次相同转速下转动,测得此时、两侧传感器信号,用01和01表示。
(3)将试重取下放在校正面II上,保持转子在与上次相同转速下转动,测得此时、两侧传感器信号,用02和02表示。
(4)校正I面上、处的变化量为1、1,校正II面上、处的变化量为2、2。

校正I面上、处的影响系数为11、12,校正II面上、处的影响系数为21、22。
影响系数标定后,转子不平衡质量即可用该系数进行求取。

式中,1为I侧不平衡质量;2为II侧不平衡质量。
3.3 不平衡量计算及结果分析
实验条件如下:取5 kg标准转子,设置转速为2 000 r/min,转子平衡精度为G2.5,采样率为1 024 Hz,由于实验所用标准转子是已被调平的转子,所以在转子、两侧90度处加试重0.762g作为转子的初始状态,以便进行动平衡系统不平衡量的检测。对采集后的数据分别用峰值差法、相关性法、FFT法进行振动信号幅值与相位的提取,进行转子不平衡量的计算。
每种方法均采集3次数据进行稳定性分析,计算出的结果如表2所示。

表2 不同方法提取振动信号的转子不平衡量计算表
分析表2中数据可得
(1)每种方法分别进行了3次转子不平衡量的计算,其中峰值差法计算出的3次不平衡质量的波动更小,稳定性更好。
(2)峰值差法计算出的不平衡质量与初始添加的0.762g试重质量更加接近,说明峰值差法提取不平衡质量的幅值相位的方式误差更小,更精确。
4 结论
基于LabView图形化编程软件,分别针对相关性法、FFT法、峰值差法编写了振动信号基频幅值相位提取程序,并进行转子动平衡实验,进行转子不平衡量的检测。实验结果表明,与相关性法和FFT法相比,采用峰值差法作为转子动平衡系统提取振动信号基频幅值相位的程序,计算出的转子不平衡量误差更小,更加精准。
[1] 李舜酩,郭海东,李殿荣.振动信号处理方法综述[J].仪器仪表学报,2013,34(8):1907-1915.
[2] 牟玉喆,潘鑫,高金吉,等.基于LabVIEW的不平衡振动信号相位实时提取方法研究[J].工业仪表与自动化装置,2015(5):17-20.
[3] 郭俊华,伍星,柳小勤,等.转子动平衡中振动信号幅值相位的提取方法研究[J].机械与电子,2011(10):6-10.
[4] 李斌,罗敏,王俊英,等.自适应整周期采样和相关滤波在转子动平衡中的应用[J].机械设计与制造,2016 (10):74-77,82.
[5] 李振兴.细化FFT的短时傅立叶变换方法[J].四川兵工学报,2010,31(2):133-135,141.
[6] 全国试验机标准化技术委员会.平衡机的描述检验与评定:GB/T 4201—2006[S].北京:中国标准出版社, 2006.
Influence of Vibration Signal Extraction Method on Dynamic Balance Accuracy
ZHANG Jiawei, TIAN Guohong
( School of Automobile and Traffic Engineering, Liaoning University of Technology, Jinzhou 121000, China )
In the rotor dynamic balance system, the extraction of fundamental frequency amplitude and phase of vibration signal plays an important role in calculating the accuracy of rotor imbalance. In view of the large error in the calculated rotor unbalance caused by the traditional method of extracting the amplitude and phase of vibration signal, a peak difference method is proposed to extract the amplitude and phase of rotor vibration signal. The peak difference method, correlation method and fast fourier transform(FFT)method are written into LabView rotor dynamic balance vibration signal amplitude and phase extraction program respectively. The rotor dynamic balance experiment is carried out, and the rotor unbalance calculated by the three methods is analyzed and compared. The experimental results show that compared with the correlation method and FFT method, using the peak difference method as the program to extract the amplitude and phase of the fundamental frequency of the vibration signal in the rotor dynamic balance system, the calculated rotor unbalance error is smaller and more accurate.
Vibration signal extraction;Peak difference method;Correlation method; Fast fourier transform(FFT) method;LabView;Dynamic balance accuracy
U464.331.1
A
1671-7988(2022)24-119-05
U464.331.1
A
1671-7988(2022)24-119-05
10.16638/j.cnki.1671-7988.2022.024.022
张佳伟(1995—),男,硕士,研究方向为车辆 CAD/CAE/CAM技术、测试控制与编程,E-mail:1063604547 @qq.com。