基于前馈-反馈联合控制策略的4WS汽车仿真与研究
2023-01-06杨鸿福周红妮冯樱
杨鸿福,周红妮,冯樱
(湖北汽车工业学院汽车动力传动与电子控制湖北省重点实验室,湖北十堰 442002)
四轮转向(four wheel steering,4WS)控制技术是提高汽车主动安全的有效措施之一。4WS 控制系统能根据当前车速、横摆角速度等运动状态信息来控制汽车后轮的转动,使汽车在低速转向时能有效提升汽车的操纵性和机动性,在高速转向时能显著增强汽车的安全性和稳定性。文献[1-3]采用滑模控制、模糊控制和优化调节等理论研究方法,通过控制汽车质心侧偏角或横摆角速度,对4WS汽车展开研究;文献[4-5]分别运用了阿克曼转向原理和零质心侧偏角前馈控制技术,进行了4WS汽车前馈控制仿真,有效降低了汽车质心侧偏角,提高了汽车行驶过程中的轨迹保持能力,但却忽略了横摆角速度的影响。上述研究只对汽车质心侧偏角或横摆角速度进行了独立控制,没有考虑不同工况转向时二者的协调性。基于某4WS 汽车,文中综合考虑质心侧偏角和横摆角速度的相互影响,并对两者进行综合协调控制。首先建立了零质心侧偏角前馈控制器,然后将线性二自由度参考模型的横摆角速度作为理想目标,对后轮实现了模糊PID 反馈控制,最后采用CarSim 与MATLAB/Simu‑link 联合仿真平台,分析和比较4WS 汽车前馈-反馈联合控制效果。
1 汽车动力学模型
线性二自由度(linear two degrees of freedom,2-DOF)汽车模型是汽车操纵稳定性分析中最典型的理想参考模型。为了使汽车的运动状态符合驾驶员的期望和整车行驶的理想状态,创建了4WS汽车线性2-DOF的动力学模型,如图1所示。文中只考虑绕Z轴的横摆运动和沿Y轴的侧向运动,轮胎只考虑线性范围侧偏特性,且忽略转向系统、悬架和地面切向力对轮胎侧偏特性的影响,不考虑空气动力、车轮轮胎由于载荷的变化而引起轮胎特性的变化以及轮胎回正力矩的作用,假设在转向时前后轴的左右车轮转角相同[6]。

图1 车辆侧向与横摆运动示意图
线性2-DOF 汽车所受外力作用沿Y轴方向的合力和绕质心的力矩之和为[7]

由于δf和δr数值很小,cosδf和cosδr近似取1。结合图1分析计算前后轮侧偏力和侧偏角:

将式(2)~(3)代入式(1)中整理可得:
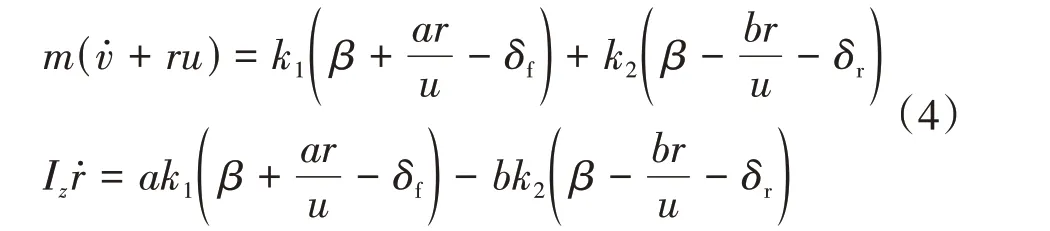
令β≈vu-1,则β̇=v̇u-1,代入式(4)整理得到运动微分方程:

式中:Fyf、Fyr为地面对前后车轮的侧偏力;δf、δr为前后车轮转向角;v为侧向车速;u为纵向车速;γ为横摆角速度;β为质心侧偏角;m为整车质量,取1412 kg;a、b为质心至前后轴距离,分别取10.015 m、1.895 m;L为轴距,取2.910 m;Iz为转动惯量,取1536 kg·m2;k1为前轮总侧偏刚度,取-78 kN·rad‑1;k2为后轮总侧偏刚度,取-64 kN·rad‑1。
当车辆仅前轮转向时,δr取0,在稳态行驶时v̇、β̇和ṙ均为0,结合式(5)可得稳态横摆角速度:

理想的横摆角速度应考虑路面附着条件μ的限制,因此轮胎附着极限下侧向加速度必须满足约束:

线性2-DOF汽车模型中侧向加速度为

由于ay主要由uγr-s决定,而uβ̇只占总侧向加速度极小部分,取因子0.85使该部分仅占总侧向加速度的15%。由式(7)~(8)可确定期望横摆角速度的上限值[8]为

综合式(5)~(9)得到理想的横摆角速度为

由于CarSim 可以精确地分析汽车的操纵稳定性、动力性以及各种关键特性,并且可以利用响应参数的特性曲线以及动画来表达实验的仿真结果,因此选用CarSim 构建整车模拟实验。文中以Car‑Sim 中的C 级车作为研究对象,输入参数为前后轮转角,输出参数为质心侧偏角和横摆角速度,路面的附着系数设置为0.85。轮胎模型选用CarSim 中的Pacejka轮胎模型。
2 前馈-反馈联合控制器系统设计
为了保证汽车的操纵稳定性,驾驶员希望在出现转向、斜坡、侧向风等外界不稳定因素的干扰时,汽车的质心侧偏角能够趋于零值,横摆角速度可以靠近目标值,从而保证汽车的操纵稳定性。基于文中建立的线性2-DOF参考模型和CarSim整车仿真模型,利用Simulink建立了零质心侧偏角前馈控制器和横摆角速度模糊PID反馈控制器,实现4WS后轮转向调节,4WS系统结构如图2所示。
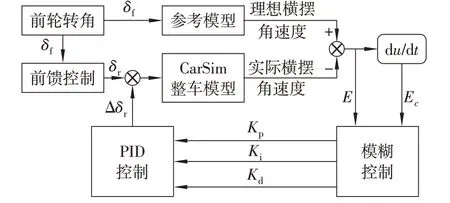
图2 4WS控制系统结构图
2.1 前馈控制策略
4WS 汽车的后轮转向控制采用零质心侧偏角比例控制,通过控制前轮转角实现对后轮转角的控制[9],即

式中:K为前后轮转角的转角比。前后轮转角比与车速的关系曲线如图3所示。从图3可以得知,当u为56.49 km·h⁻¹时,K为0,此时4WS 控制。变为前轮转向(front-wheel steering,2WS)控制。当u小于56.49 km·h⁻¹时,K小于0,后轮与前轮转向方向相反。u大于56.49 km·h⁻¹时,K大于0,后轮与前轮转向方向相同。当u小于24 km·h⁻¹时,可以看到K小于-1,表明在低速时或原地转弯中后轮转角要大于前轮转角,不符合实车设计,所以汽车在低速行驶时的后轮的最大容许转向角最多与前轮相同[9]。当汽车在高速行驶时,前轮转角一般较小,且随着车速的提高K值斜率也逐渐减小,说明在高速状态下后轮同向转角也相应减小,符合汽车高速行驶时的状况。
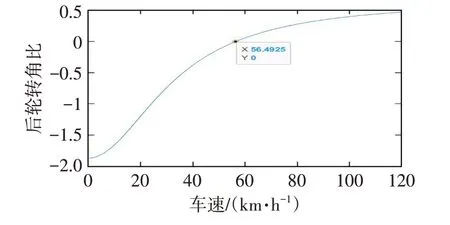
图3 前后轮转角比与车速的关系曲线
2.2 模糊PID控制器
由于模糊控制算法具有较强的鲁棒性和不依赖于数学模型的特点,而PID 控制具有结构简单、自适应性强等优点。文中将PID 控制与模糊控制相融合,将两者优势相互补充,从而达到更好的控制效果[10]。控制器结构如图4所示。
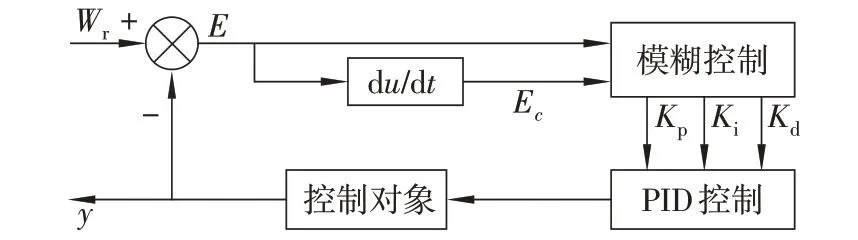
图4 模糊PID控制器结构
在设计4WS控制系统时,选取横摆角速度γ和其期望值γd的偏差变化率Ec和误差E作为控制器的输入参数,KP、Ki、Kd作为输出参数。输入输出参数的模糊集为{NB、NM、NS、ZO、PS、PM、PB},对应模糊规则为{负大,负中,负小,零,正小,正中,正大}。输入变量的隶属度函数如图5所示。输出变量KP、Ki、Kd的隶属度函数如图6所示。为使汽车稳定性具有良好的控制效果,根据参数KP、Ki、Kd自整定要求,确立控制器的输入与输出信号的比例、积分和微分关系,建立了相应的模糊控制规则,如表2~3所示。

图5 输入变量隶属度函数
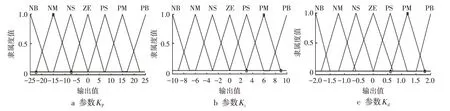
图6 输出变量隶属度函数

表2 参数Kp模糊控制规则
3 仿真结果分析
文中基于CarSim 与MATLAB/Simulink 联合仿真平台,分别对前轮转向、零质心侧偏角前馈控制和前馈-模糊PID反馈综合控制的4WS汽车进行仿真分析和比较。采用前轮角阶跃信号作为输入,汽车转向时前轮的最大转角设定为6°,车速分别选取中低速40 km·h⁻¹、高速100 km·h⁻¹进行性能对比。在仿真研究中,选取反映汽车侧向运动和横摆运动的质心侧偏角和横摆角速度作为响应参数。
3.1 中低速仿真
车速为40 km·h⁻¹、前轮转角为6°时,进行角阶跃工况仿真,结果如图7所示。质心侧偏角曲线如图7a所示,4WS汽车在经过前馈-模糊PID 反馈联合控制后,其质心侧偏角经历短暂波动后平稳地过渡到了稳定状态,与4WS 前馈控制和2WS 相比,4WS 联合控制使得质心侧偏角更趋近于0°;但4WS联合控制和4WS前馈控制的超调量比前轮转向略大。而经过4WS前馈控制的汽车质心侧偏角没有到达0°的原因是前馈控制器的模型公式是由稳态线性2-DOF 推导得到,而CarSim 整车模型比线性2-DOF 汽车模型更符合实车行驶的实际情况。横摆角速度曲线如图7b 所示,与2WS 汽车相比,4WS 汽车横摆角速度明显增大,在低速、大转弯工况下,可以更容易通过弯道,转向能力增加,提高了汽车的操纵性。在低速时后轮逆向转动,减小了汽车的不足转向特性,此时4WS 比2WS 具有更小的转弯半径(图7c),提高了低速转向时的机动性。但4WS 前馈控制的横摆角速度上升幅度过大,会增加驾驶员的操纵难度,而4WS联合控制的横摆角速度更趋近于前轮转向的横摆角速度,保证了驾驶员的操纵稳定性。
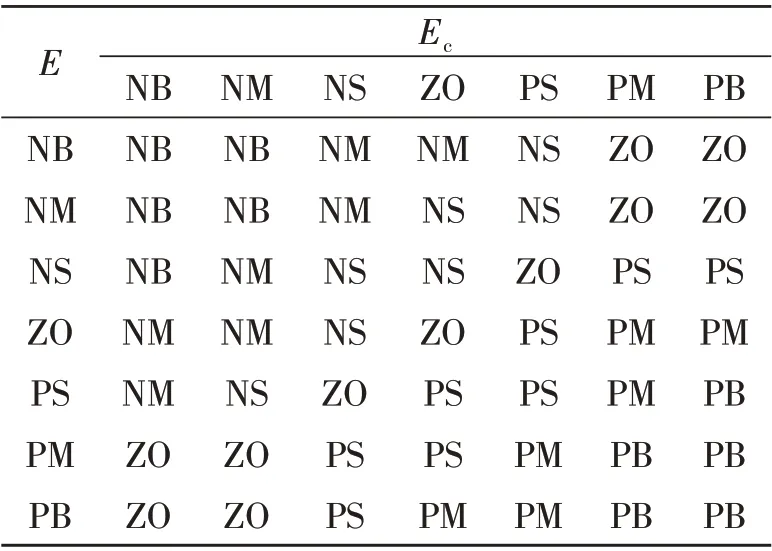
表3 参数Ki、Kd模糊控制规则

图7 40 km·h⁻¹车速下质心侧偏角及横摆角速度响应曲线
3.2 高速仿真
车速为100 km·h⁻¹、前轮转角为6°时,进行角阶跃仿真,结果如图8所示。质心侧偏角曲线如图8a所示,汽车在经过4WS联合控制后,其质心侧偏角经历短暂波动后平稳地到达稳定状态,瞬态响应的品质较好,与2WS 相比,质心侧偏角稳态值较小,提升了轨迹保持能力。虽然稳定状态下的4WS联合控制的质心侧偏角略大于4WS前馈控制的质心侧偏角值,但汽车在高速行驶下应更重视横摆角速度,此时牺牲少量轨迹保持能力来提升横摆角速度的瞬态响应品质,更有利于汽车在转向工况下维持汽车的横向稳定性[11]。由图8b 可知,2WS控制的汽车的横摆角速度超调量最大,波动时间最长,4WS 联合控制的横摆角速度比2WS 控制和4WS 前馈控制的超调量和响应时间更小,提升了瞬态响应的品质,高速时横摆角速度的稳态值介于前轮转向和前馈控制之间。由图8c 可知,与2WS控制相比,4WS 联合控制增加了不足转向量,提高了高速时的横向稳定性与安全性。与4WS前馈控制相比,横摆角速度下降幅度不宜过大,避免了过大不足转向量给驾驶员带来操纵上的困难。

图8 100 km·h-1车速下质心侧偏角及横摆角速度响应曲线
4 结论
基于建立的线性2-DOF 汽车参考模型,设计了汽车4WS 联合控制策略。在中低速转向工况下,4WS 联合控制策略提高了整车的操纵性和机动性,且较小的质心侧偏角保证了汽车有较好的轨迹保持能力,有效控制了车身姿态。在高速转向工况下,4WS 联合控制的汽车虽然轨迹保持能力略微有所减小,但瞬态响应的品质较好,降低了横摆角速度的超调量和响应时间,且适度增加了一定的不足转向量,使汽车在高速转弯时具有较好的安全性和稳定性。
