深施型液肥对靶点施装置设计与试验
2023-01-05王金武刘子铭孙小博周文琪
王金武 刘子铭 孙小博 唐 汉 王 奇 周文琪
(东北农业大学工程学院,哈尔滨 150030)
0 引言
液肥深施技术,即使用相关机具,将液肥施用到作物根部附近的施肥技术。液肥深施技术具有直达作物根系、提高作物产量、减少液肥挥发对农田环境造成的污染,促进根系向下生长等优点[1],符合我国农业绿色可持续发展战略。
国外对液肥深施机具研究起步较早。RAHMAN等[2]研制了圆盘探针式液肥深施机,在施肥圆盘上均布施肥针,施肥针随施肥圆盘滚动依次入土施肥;WOMAC等[3]设计了一种曲柄滑块驱动的液肥深施机,通过曲柄周期性转动,带动注肥针入土喷肥;DA SILVA等[4]研制了一种凸轮-曲柄摇杆驱动式液肥深施装置,采用凸轮控制喷肥针在竖直方向上往复运动和入土喷肥。国内液肥深施技术研究进展较为迅速。赵桂虎[5]研制了舵轮式液态肥深施机,施肥圆盘上均布喷肥针,在拖拉机牵引下,施肥圆盘滚动,喷肥针依次入土施肥;杨自栋等[6]研制了2FDY-02型轮盘式液肥深施机,由拖拉机驱动液肥泵将液肥压入施肥轮,施肥轮上均布导流开穴器,当导流开穴器插入土壤后喷肥口开启,液肥沿导流开穴器射入土壤;东北农业大学王金武团队多年来从事液肥深施机的研究[7-9],研制了1YJ-140深施型液肥穴施肥机、SYJ-2深施型液肥穴施肥机和SYJ-3深施型液肥穴施肥机,其分别采用曲柄摇杆机构、全椭圆齿轮行星轮系和非规则行星齿轮系驱动喷肥针实现入土喷肥、出土停喷,均具有较优的作业效果。在上述研究中,所研制的液肥穴深施机具均通过机械结构实现了液肥定点深施,节约了肥料,减少了液肥挥发,但以上机具在作业过程中,无法确保液肥精准深施于作物植株附近。
综上所述,针对现有液肥穴深施机具施肥位置不准确等问题,结合机械结构设计和自动控制技术,设计一种深施型液肥对靶点施装置。设计关键部件液肥深施开沟器,应用EDEM软件验证开沟器结构的可行性。使用光电传感器和电磁阀协同作用设计液肥对靶点施系统。通过田间试验验证装置的作业性能。
1 整体结构与工作原理
1.1 整体结构
深施型液肥对靶点施装置主要由机架总成、三点悬挂架、减速器、输肥系统、液肥深施开沟器、喷肥针、开沟器安装架、连接杆对靶点施控制系统和地轮总成组成,其中输肥系统包括液肥泵、过滤器、液肥箱、溢流阀和输肥管路,对靶点施控制系统由控制盒、光电传感器和电磁阀等组成。深施型液肥对靶点施装置整体结构如图1所示。
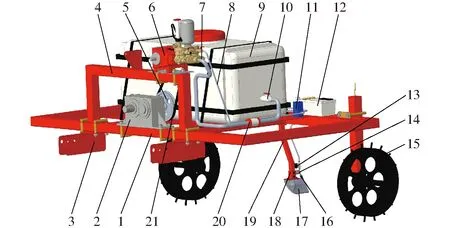
图1 深施型液肥对靶点施装置结构简图
1.2 工作原理
深施型液肥对靶点施装置通过三点悬挂架与牵引拖拉机挂接,拖拉机动力输出轴驱动减速器,减速器输出端的主动带轮带动液肥泵工作,液肥泵从液肥箱中吸取液肥,将液肥输送至电磁阀口。装置由拖拉机牵引作业,液肥深施开沟器再以设定的入土深度开出肥沟,对靶点施控制系统的测速模块实时监测装置前进速度,光电传感器检测植株位置,当前进方向上植株遮挡光电传感器,控制盒结合装置当前速度控制电磁阀开启,液肥经由喷肥针喷出,完成液肥对靶点施。
2 关键部件设计及参数确定
2.1 液肥深施开沟器结构与性能要求
(1)液肥深施开沟器结构
液肥深施开沟器是装置的关键部件,应在确保开沟深度的前提下具有较好回土性能,因此,液肥深施开沟器结构如图2所示,其由滑切刃、扰土面、挤土面、导向斜面和整形面组成。
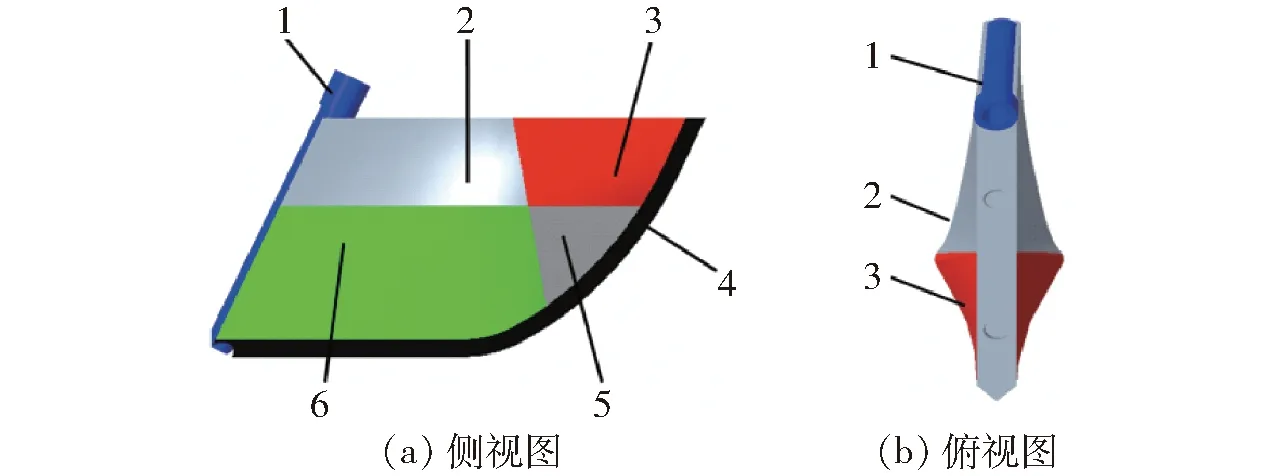
图2 开沟器整体结构图
(2)液肥深施开沟器性能要求
开沟器作业时完全入土,土壤受扰土面扰动发生向上抬升和侧向抛掷,如图3所示。CDE和C1D1E1为侧抛土壤形成的沟垄截面,GG1H1H为向上抬升土壤截面,EE1I为肥沟横截面。根据开沟器结构特点,液肥深施开沟器将肥沟分为两部分,分别是区域EE1F1F和区域F1FI,区域EE1F1F土壤受扰土面抬升侧抛后沿导向斜面回落,区域F1FI土壤受挤土面和整形面挤压形成肥沟。
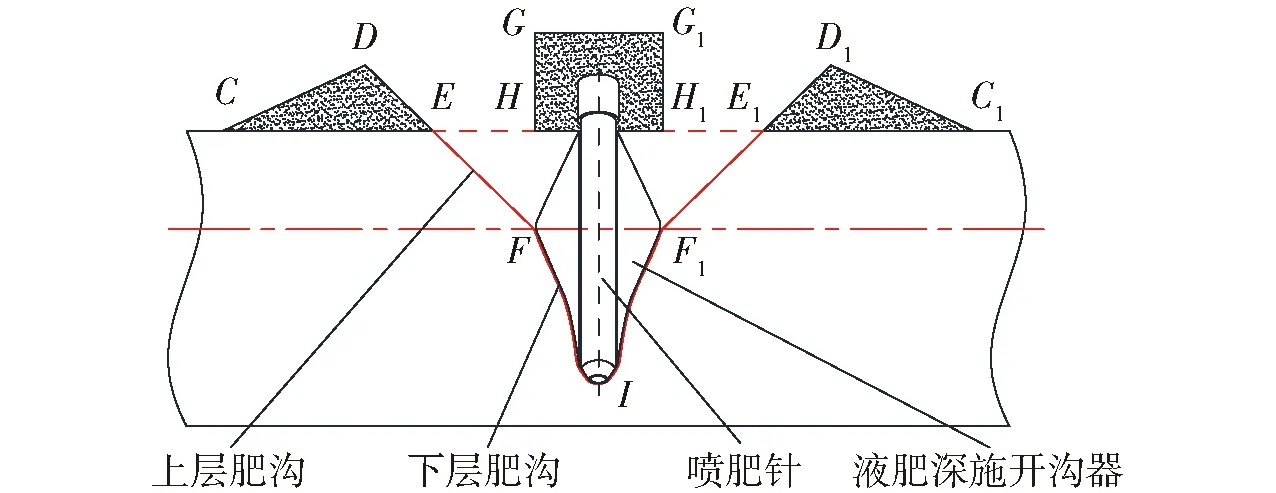
图3 土壤扰动示意图
开沟器作业过程中土壤体积守恒,故土壤横截面面积守恒[10],回土前横截面土壤满足
SEE1F1F=SCDE+SC1D1E1+SGG1H1H
(1)
式中SEE1F1F——上层沟形轮廓截面面积,mm2
SCDE、SC1D1E1——沟垄截面面积,mm2
SGG1H1H——向上抬升区域土壤截面面积,mm2
土壤回流如图4所示,抬升土壤经导向斜面滑落,回填肥沟。侧抛土壤按照土壤自然堆积角堆积[11],部分土壤流回肥沟。综合图3和图4可知,土壤回流后,回填区域土壤满足
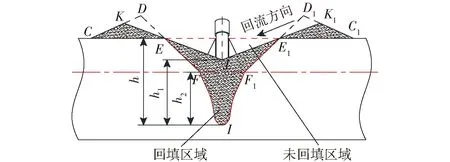
图4 土壤回流示意图
SEJE1I=SKDE+SK1D1E1+SGG1H1H
(2)
式中SEJE1I——回填区域土壤截面面积,mm2
SKDE、SK1D1E1——回流土壤截面面积,mm2
液肥深施开沟器应具有一定的回土能力,根据上述分析可知,开沟器作业时,回落的土壤主要为受扰土面扰动的土壤,即区域EE1F1F内土壤,被填充的区域主要为区域F1FI,但填充的土壤难以量化,而该区域的深度h2是定值,因此选用图4中回土深度h1作为衡量开沟器回土性能的指标,若回土深度h1大于区域F1FI深度h2,则认为液肥深施开沟器达到设计要求。
2.2 滑切曲线设计
为便于控制滑切刃形状,选择抛物线作为滑切曲线。对抛物线建立直角坐标系,如图5所示。取抛物线上两点A(x1,y1)、B(x2,y2),两点滑切角分别为θ1、θ2,yAB为开沟器整体高度。取点A为滑切曲线起始点,点B为滑切曲线终点。则θ1为起始滑切角,θ2为终止滑切角。设滑切曲线AB方程为
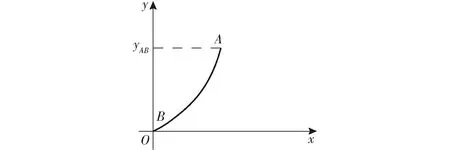
图5 滑切曲线
y=ax2
(3)
式中a——滑切曲线系数
AB斜率为
(4)
AB高度差即滑切刃部分高度
yAB=yA-yB
(5)
联立可得抛物曲线AB方程为
(6)
由式(6)可知,滑切曲线由θ1、θ2和yAB决定。根据液肥深施农艺要求,选择yAB=80 mm。根据滑切原理,滑切角θ应大于土壤摩擦角φ。东北地区黑壤土摩擦角为23°[12],故取起始滑切角θ1=25°。而文献[13-14]表明滑切角在35°~55°范围内滑切效果较好,因此选定终止滑切角θ2=45°,确定滑切曲线方程为y=0.014 3x2。
2.3 扰土面与导向斜面设计
设计开沟器扰土面结构如图6所示。
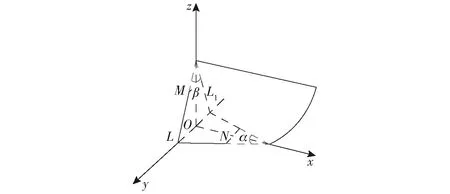
图6 扰土面结构简图
扰土面的开度、高度等参数难以确定,但由于在此开沟器尾部需要镶嵌喷肥针,而现有喷肥针尺寸多为10~20 mm[15-17],因此暂取开沟器开度20 mm。而扰土面高度、扰土面夹角和开沟器开度几何关系为
(7)
式中α——扰土面水平夹角,(°)
β——扰土面竖直夹角,(°)
lOL——扰土面上点L与原点O间距离,mm
hOM——扰土面高度,mm
lON——扰土面长度,mm
开沟器扰土面与竖直平面夹角应大于土壤摩擦角,因此当开沟器开度取20 mm时,根据所取土壤摩擦角数值和式(7)可得扰土面高度为21 mm。而根据回土原理分析,开沟时,肥沟被分为上层肥沟和下层肥沟两部分,即区域EE1F1F和区域FF1I,如 图7 所示。
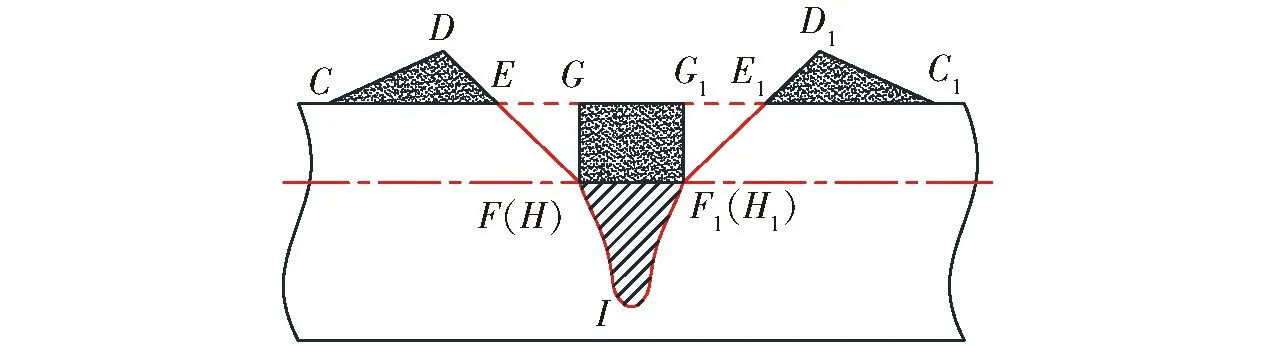
图7 受扰动土壤示意图
由回土原理分析和图7可知,土壤回落主要依靠向上抬升区域GG1H1H,假设区域GG1H1H的土壤完全回落填充下层肥沟区域FF1I,则SGG1H1H和SFF1I应满足
SGG1H1H≥SFF1I
(8)
式中SFF1I——下层肥沟截面面积,mm2
区域EE1F1F可视为矩形区域,区域FF1I可近似视为三角形区域。综合前期所取的开度和扰土面高度数值,可知若开度固定,扰土面高度取21 mm时,SGG1H1H
导向斜面的作用是引导土壤落回沟内,实现回落土壤覆埋肥料的目的。导向斜面结构如图8a所示。
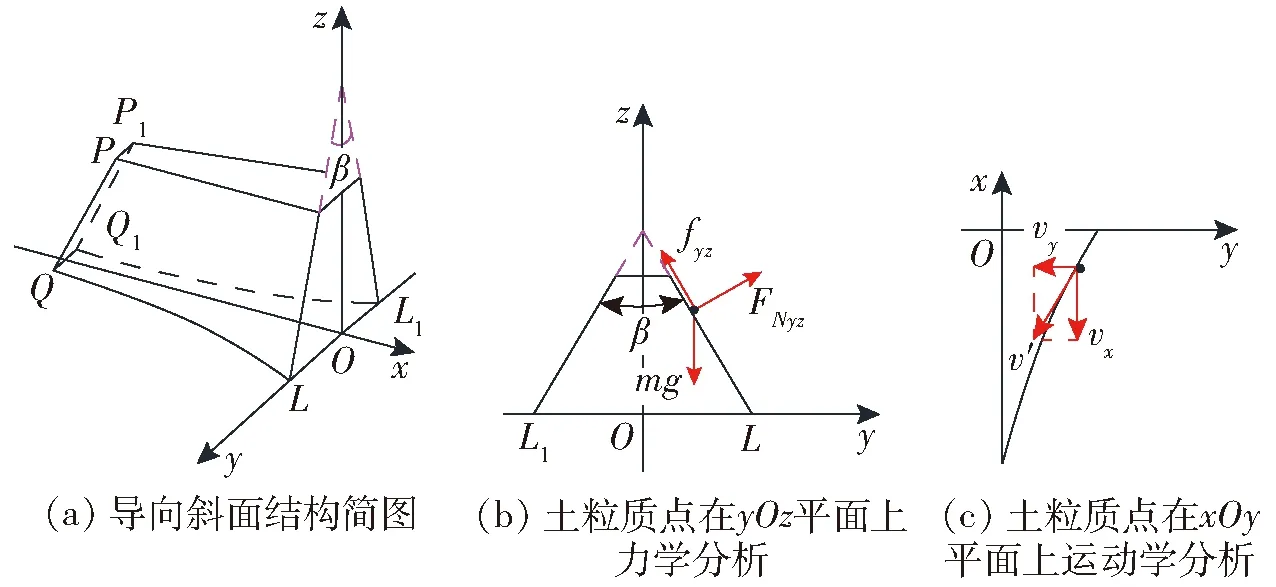
图8 开沟器导向斜面示意图
对其上单一土粒质点进行运动学分析,如图8b,土粒在yOz平面内沿斜面下滑,对其进行动力学分析,有
(9)
(10)
式中m——土壤颗粒质量,kg
fyz——土粒在xOz面所受阻力,N
ayz——土粒沿斜面下滑加速度,m/s2
FNyz——土粒沿斜面下滑所受支持力,N
μ——斜面与土壤颗粒间摩擦因数,取0.5
将式(10)代入式(9),整理得
(11)
根据已确定的开沟器结构参数以及土壤颗粒摩擦因数[18],可知式(11)中μsin(β/2)项极小,因此计算时可忽略摩擦力fyz,整理式(11)得
(12)
根据图8b中几何关系,对土粒质点列运动学方程得
(13)
综合式(12)、(13)可得土粒质点滑落到斜面底端时间为
(14)
土粒质点在xOy面上运动如图8c所示,其速度可分解为沿y轴负方向和沿x轴负方向的速度分量,沿x轴负方向的速度分量与开沟器前进速度大小相等方向相反,因此土粒在导向斜面上沿x轴负方向为匀速直线运动,其位移公式为
x=vxt
(15)
将式(14)代入式(15),可得土粒质点位移x(即导向斜面长度)
(16)
根据式(16)可知,导向斜面长度与开沟器前进速度、开度有关。设开沟器以速度v=1.0 m/s作业时,对开沟器导向斜面进行计算得导向斜面长度 42 mm,为保证传感器与喷肥针间安装距离,取导向斜面长80 mm。土粒离开导向斜面作平抛运动,如图9所示。x′1为尾部倾斜一定角度时的平抛位移,x′2为尾部竖直时平抛位移[19]。
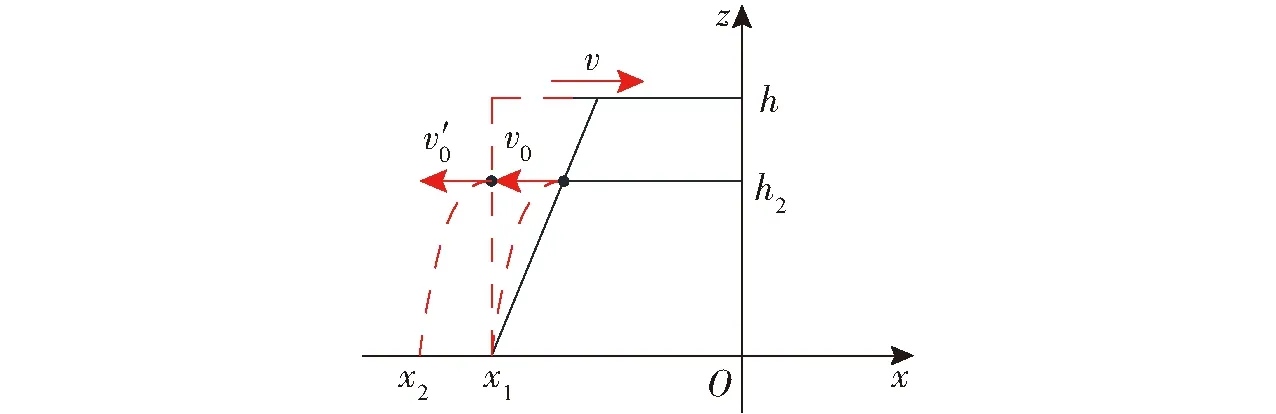
图9 土粒质点平抛运动轨迹
根据图9可知,开沟器尾部斜置一定角度,可使土壤沿导向斜面滑落后直接覆埋肥料。平抛运动水平位移公式为
(17)
计算得x′1=14 mm。由图9几何关系得开沟器尾部倾角
(18)
计算得η=75°。
2.4 挤土面与整形面设计
挤土面与整形面结构尺寸已由扰土面和导向斜面结构参数确定,因此仅对其进行力学分析。开沟器作业时,挤土面推压土壤开启沟壑,再由整形面挤压沟壁,形成肥沟。
挤土面上土粒质点空间受力如图10所示,其空间受力关系为
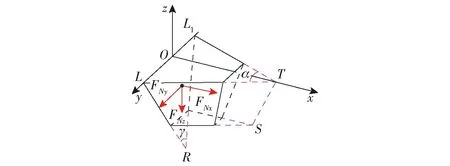
图10 挤土面空间受力示意图
(19)
根据式(19)可得,开沟器作业时,挤土面对土壤产生推压力,从而形成肥沟。
整形面主要对肥沟及沟壁进行整形[20],对其上单一土粒质点进行力学分析,如图11所示。
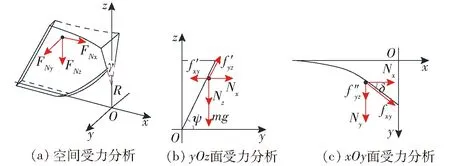
图11 整形面土粒质点动力学分析
土粒质点沿x、y、z轴方向动力学方程为
(20)
式中Nx——土粒受压力x方向上分力,N
Ny——土粒受压力y方向上分力,N
Nz——土粒受压力z方向上分力,N
fxy——土粒在xOy平面内摩擦力,N
f′xy——fxy在yOz平面上的分力,N
f″yz——f′yz在xOy平面上的分力,N
ψ——整形面与y方向夹角,(°)
δ——土粒运动方向与x轴夹角,(°)
ax——土粒在x方向上加速度,m/s2
ay——土粒在y方向上加速度,m/s2
az——土粒在z方向上加速度,m/s2
将式(20)整理为
(21)
由式(21)可知,角δ增大,ay和az增大,整形面对土壤水平和竖直方向压力FNy和FNz增大,可有效挤压沟壁达到整形目的。
3 虚拟仿真
3.1 虚拟仿真模型建立
(1)虚拟仿真接触模型确定
东北地区土壤是含水率较高的黏重黑土,土壤与触土部件间的黏附力较大,为使虚拟土壤贴近实际土壤条件,保证虚拟仿真的准确性,选用Hertz-Mindlin JKR Cohesion接触模型[21],该模型是一种凝聚力接触模型,适用于模拟泥土等颗粒间易发生粘结和团聚的含湿物料。
(2)虚拟土壤模型建立
为使虚拟土壤贴近真实土壤条件,设置虚拟土壤颗粒半径为2 mm[22-23]。虚拟土壤分层建立,每层20 mm,深度0~100 mm土壤为作业层,此深度内土壤颗粒随机生成,100~140 mm为缓冲层,用于隔离作业层和虚拟土槽底部[24]。综上所述,确定虚拟土壤尺寸为1500 mm×600 mm×140 mm,并分别设置准备区和数据收集区。虚拟土壤如图12所示,虚拟土壤参数见表1。
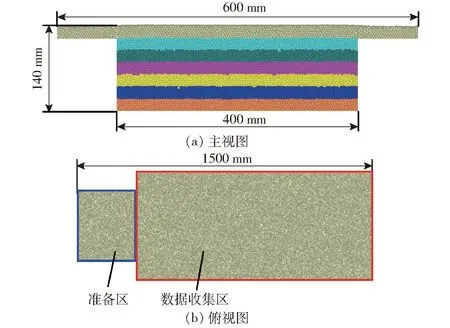
图12 虚拟土壤模型
表1 离散元仿真参数
(3)整体模型建立
运用CREO 5.0软件对开沟器进行三维建模(比例1∶1),并以.step文件格式导入EDEM中,设置开沟器材料为65Mn,密度7 861 kg/m3,泊松比0.29,剪切模量7.9×104MPa。整体模型如图13所示。
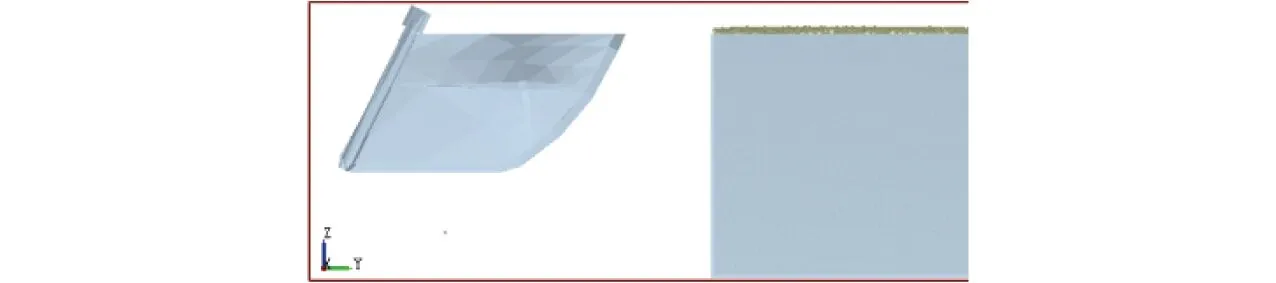
图13 离散元虚拟仿真模型
设置开沟器沿作业方向前进速度1.0 m/s,入土深度80 mm,总时间2.0 s,进行虚拟仿真。
3.2 开沟器结构可行性验证
根据开沟器理论分析可知,对土壤回落起主要作用的是开沟器扰土面和导向斜面,故在仿真中主要分析上述结构。EDEM软件后处理模块中将颗粒转换为位移矢量表示,可观察土壤颗粒受扰动情况[25]。
扰土面对土壤扰动仿真结果如图14所示。开沟器作业时,扰土面促使土壤向上抬升和侧向抛掷。向上抬升的土壤随着开沟器前进会直接回落于开沟器表面,并沿导向斜面滑落。开沟器刚入土时,与扰土面所接触的土壤向侧面抛撒,如图15a所示,其中绿色箭头表示发生侧抛的土壤,土壤抛出后,在沟侧堆积形成沟垄。随着开沟器前进,侧抛所形成的沟垄按照自然堆积角堆积,一部分土壤滑落回沟内,如图15b所示,图中箭头方向表示侧抛回落的土壤。
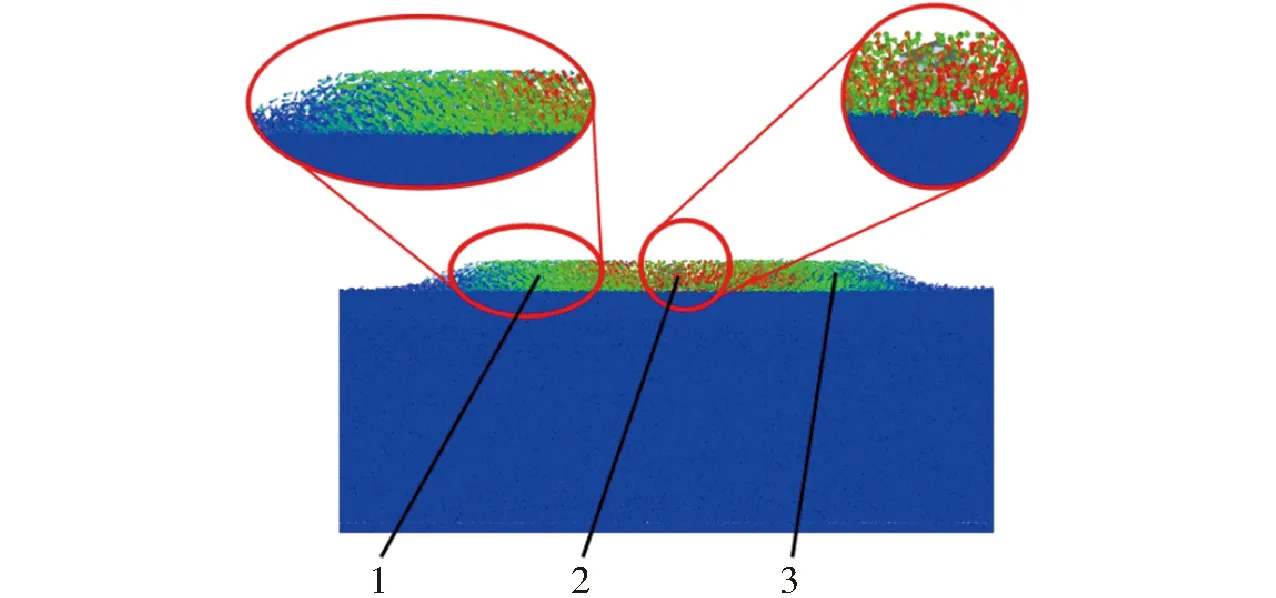
图14 土壤扰动仿真结果
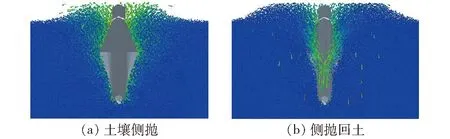
图15 土壤侧向抛掷仿真结果
受扰动的土壤回落时,首先落于开沟器表面,随着开沟器前进,土壤沿导向斜面下滑,并最终落于喷肥针后方,如图16所示。
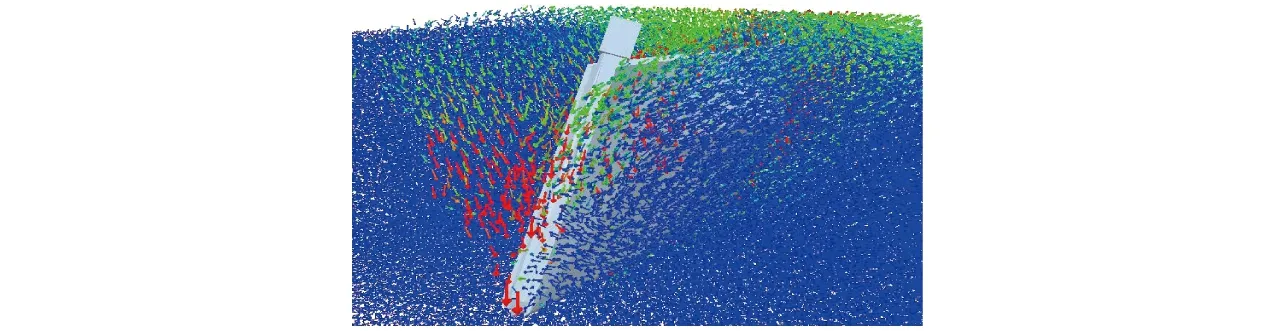
图16 回落土壤流向图
虚拟仿真获取沟形轮廓如图17所示。由图17a可知,开沟器作业后,回落土壤为上层土壤。沟形轮廓虚拟仿真结果与开沟器对比如图17b所示,开沟器回土深度h1高于开沟器整形面高度,整形面高度即下层肥沟深度h2,可知开沟器具有回土性能。

图17 沟形轮廓虚拟仿真图
综合虚拟仿真过程和结果,可知理论分析与虚拟仿真较为一致,EDEM虚拟仿真验证了液肥深施开沟器回土性能和其结构的可行性。
4 对靶点施控制系统设计
系统通过传感器检测植株茎秆,再由单片机根据装置前进速度控制电磁阀启闭,从而实现液肥对靶点施作业。系统硬件由光电传感器、电磁阀、测速模块和继电器模块等组成,液肥对靶点施控制系统硬件框图如图18所示。
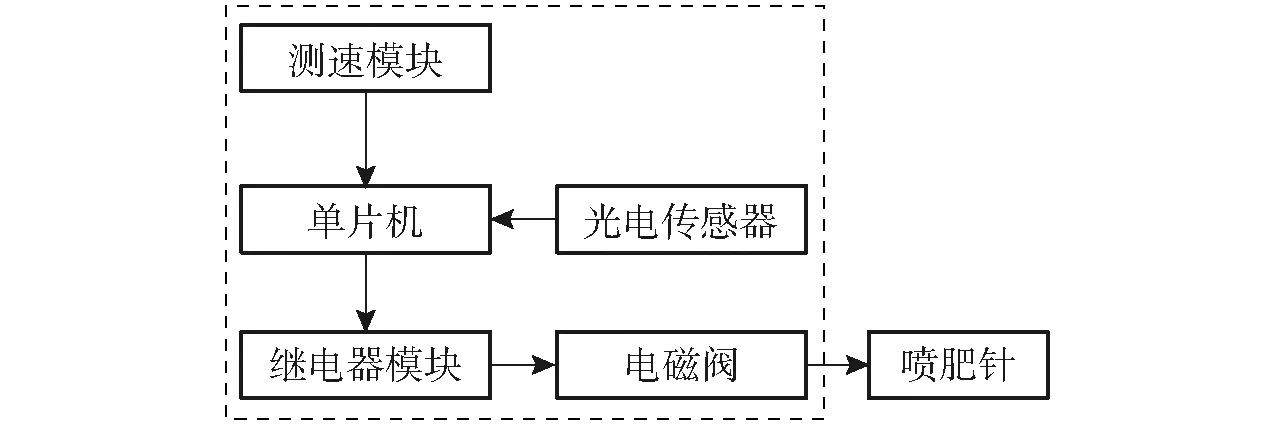
图18 对靶点施控制系统硬件框图
4.1 系统硬件
系统电路如图19所示,微控制器采用STM32F103C8T6单片机,其工作频率可达72 MHz,满足系统设计需求;U1是电源转换模块,采用MK002184芯片,用以将作业机具蓄电池提供的 12 V 电源转换为系统中各模块需要的5 V或3.3 V电源;P1为光电传感器,其信号输出端通过分压电路板与单片机PC13引脚相连,确保输入单片机的电压信号在规定范围内;P2为电磁阀,微控制器在接收传感器信号后,驱动5 V继电器吸合,实现电磁阀开启。
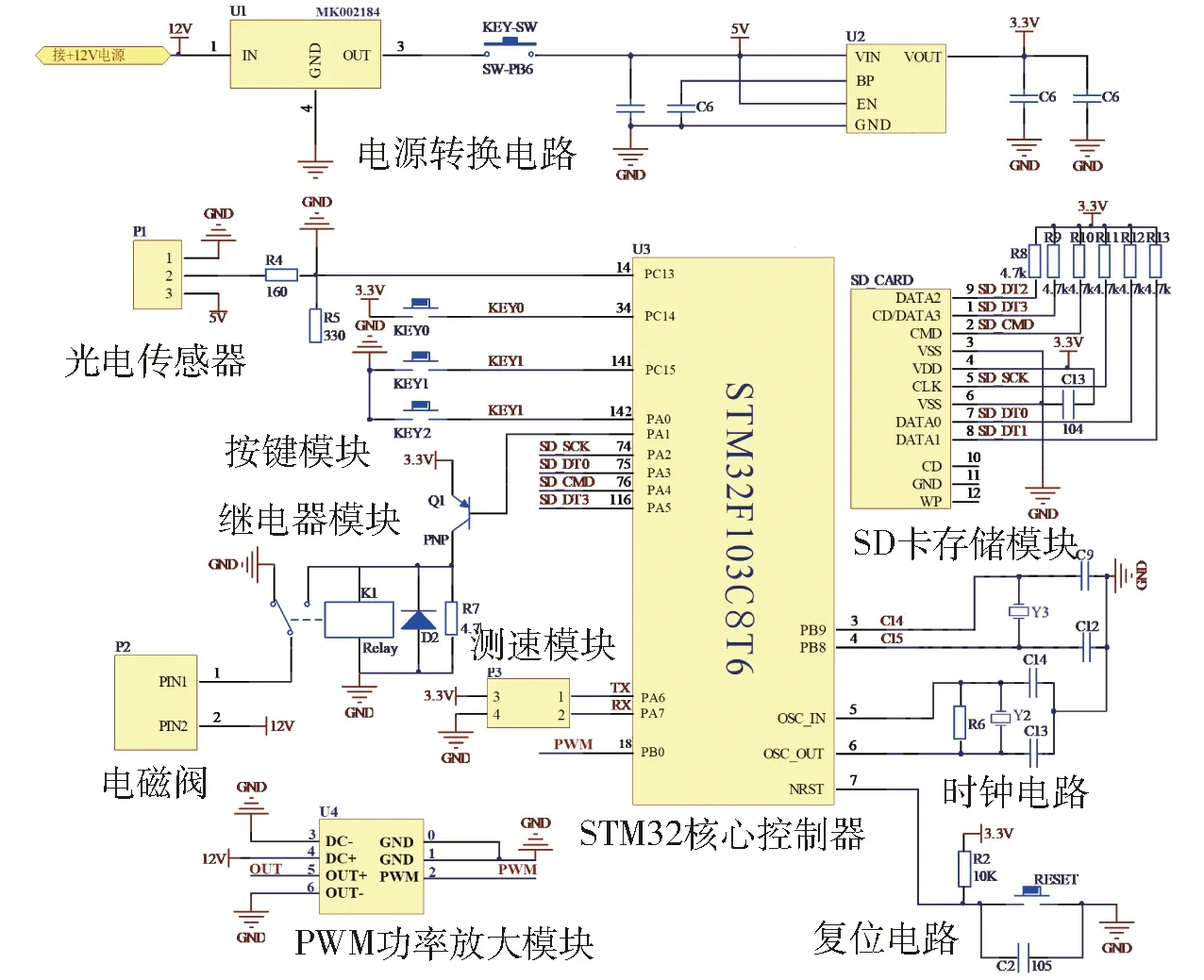
图19 对靶点施控制系统电路
探测元件采用沪丰机床电器制造厂生产的 E18-D80NK 光电传感器,其可发射640~650 nm红色可见激光,工作电压6~36 V DC,工作电流200 mA,响应时间2 ms;执行元件采用Kamoer流体科技公司生产的KVE21PS12N2N651A型常闭电磁阀,工作电压12 V DC,响应时间25 ms,最大工作压力0.8 MPa。对靶点施控制系统及电路板实物如图20所示。
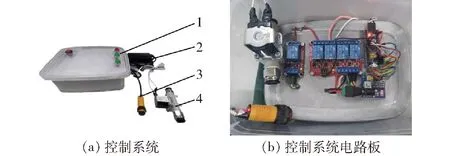
图20 对靶点施控制系统实物图及其电路板
4.2 系统程序
系统软件程序工作流程如图21所示。首先初始化系统I/O端口、定时器和寄存器。随后系统开始工作,测速模块监控作业速度,光电传感器检测植株位置。当传感器检测到植株后,单片机根据作业速度得出电磁阀开启时机,继电器吸合,电磁阀开启,喷肥针喷肥,喷肥量由系统延时程序控制,在延时结束后,继电器关断,电磁阀闭合,喷肥针停喷,完成对靶施肥作业。
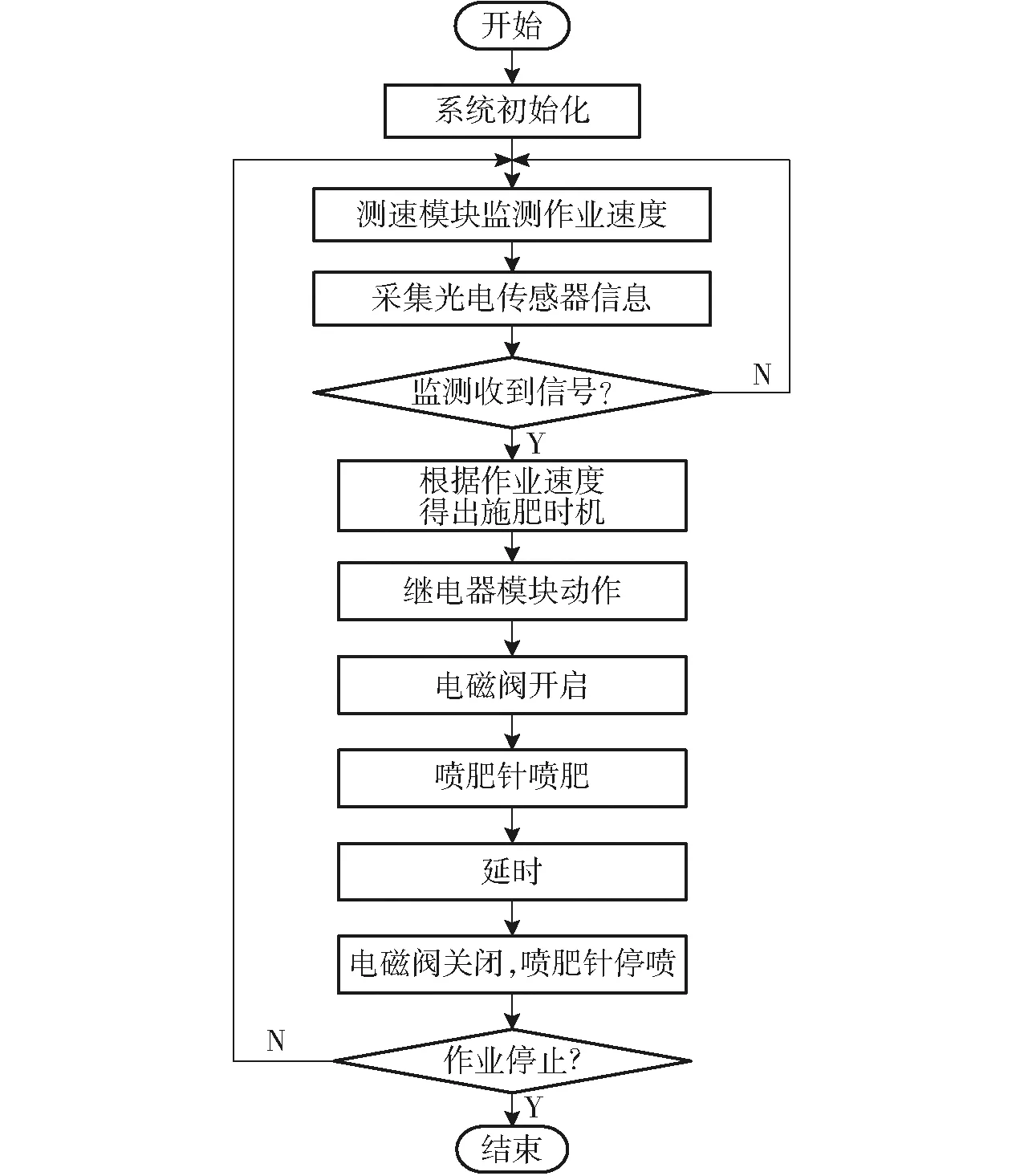
图21 对靶点施控制系统工作流程图
4.3 对靶点施运动过程分析
光电传感器检测植株位置,测速模块监测行进速度,随后控制盒控制电磁阀开启,执行施肥动作。如图22所示,光电传感器与喷肥针间有一定安装距离,当传感器首次检测到植株时即位置Ⅰ,由于微控制器、继电器模块和电磁阀需要一定的响应时间,且喷肥针距离植株较远,因此位置Ⅰ时电磁阀不动作,喷肥针不施肥。当装置到达位置Ⅱ时,微控制器、继电器模块和电磁阀达到响应时间且满足液肥施用农艺要求时,继电器模块吸合,电磁阀开启,喷肥针施肥,达到一定施肥量后,电磁阀关闭,完成一次对靶施肥动作。装置继续行进,在位置Ⅲ时,传感器未检测到植株,电磁阀不开启,喷肥针不施肥,直至检测到下一植株。

图22 施肥过程示意图
根据对靶点施系统运动过程分析可知,装置施肥时机与行进速度、传感器安装位置、控制系统响应时间有关。传感器安装位置与装置喷肥位置关系图如图23所示。
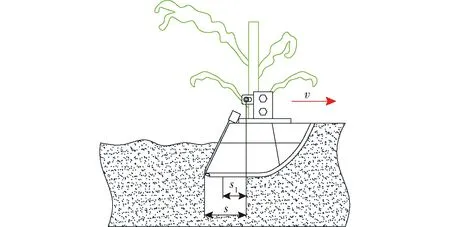
图23 施肥位置与传感器安装位置关系图
在实际作业过程中对靶点施系统根据机具行进速度变化实时调整电磁阀开启时机,从而避免电磁阀开启时间过早或过晚,造成液肥误施或漏施。因此根据施肥作业要求和所选传感器、继电器模块及电磁阀响应时间,传感器安装距离和机具前进速度之间应满足
(22)
其中
t1=t2+t3+t4
(23)
式中t1——喷肥动作总时间,s
t2——传感器响应时间,s
t3——继电器模块响应时间,s
t4——电磁阀响应时间,s
s1——喷肥起始点与植株间距,mm
s——安装间距,mm
根据式(22)、(23),结合液肥深施“侧5深8”农艺要求[26],取s1=50 mm,传感器安装架固接于开沟器连接杆上,取安装间距s=80 mm,传感器响应时间t2=2 ms,继电器响应时间t3=2 ms,电磁阀响应时间t4=25 ms,可得装置前进速度不大于1.0 m/s。
施肥位置与装置行进速度关系如图24所示。根据上述系统的响应时间、传感器安装距离和机具前进速度之间关系可知,在行进速度较为合适时,传感器检测植株后,喷肥针运动到施肥位置再进行施肥,如图24a所示;在速度较低时,传感器检测到植株和系统响应时间结束后,喷肥针还未到达指定施肥位置,如图24b所示,此时会造成施肥提前,即装置误施;在行进速度较快时,传感器检测植株后,系统未达到指定响应时间,喷肥针已离开施肥位置,如图24c所示,即装置漏施。

图24 施肥位置与行进速度关系示意图
5 田间试验
5.1 试验方法
为验证深施型液肥对靶点施装置在田间的作业性能,于2021年7月1—8日,在东北农业大学阿城试验田进行田间试验。试验期间平均气温28~32℃,无降雨。试验田为玉米植株,平均行距 650 mm,平均高度270 mm,平均株距330 mm。试验时,以20 m作为一个试验区长度,设置试验区前后各5 m区域作为缓冲区用于装置启停缓冲。统计方法为在试验区内沿装置前进方向选取4个测试小区,测试小区为0.4 m(玉米种植垄宽)×2 m,每个测试小区间隔0.5 m。装置由拖拉机牵引。试验前,调整拖拉机三点悬挂控制装置作业深度80 mm。试验时控制拖拉机前进速度为0.4、0.6、0.8、1.0 m/s。以回土率和对靶率为试验指标,田间试验现场如图25所示。

图25 田间试验现场
5.2 田间试验评价指标
(1)回土深度
回土深度反映装置作业后回落土壤对液肥覆埋情况。田间沟形轮廓如图26所示。
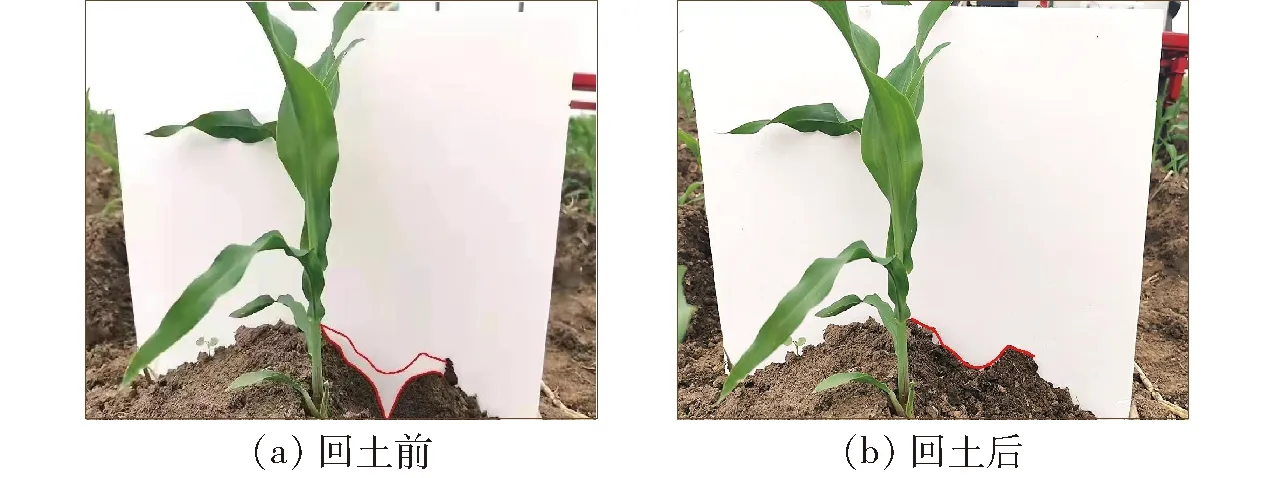
图26 田间沟形轮廓图
提取图26中田间沟形轮廓,如图27所示,分别取回土最低点A和沟底最低点B,hAB即为田间回土深度。
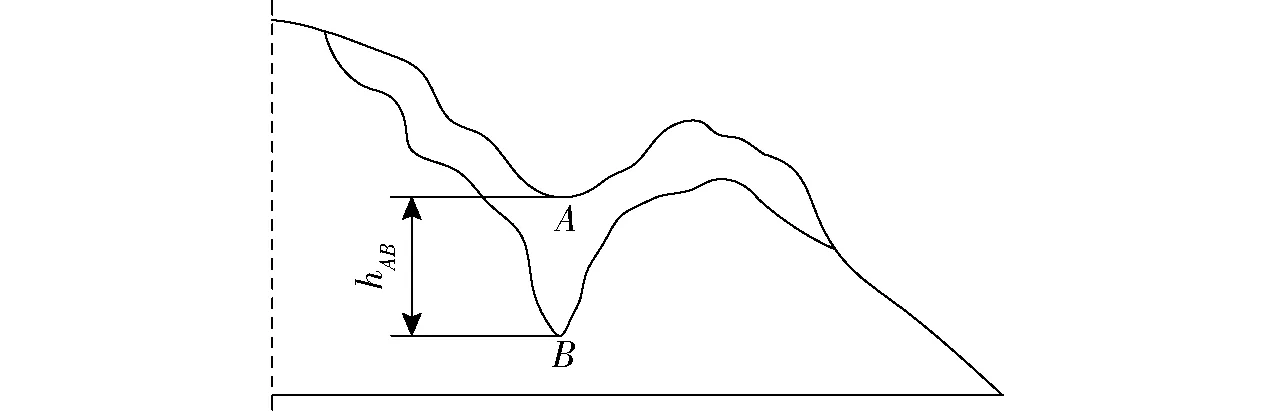
图27 田间沟形轮廓提取图
回土深度统计方法为在每个测试小区内随机选取3处位置测量回土深度并取平均值,即该测试小区回土深度。每个试验区内测试小区回土深度取平均值,即试验区回土深度。根据液肥深施开沟器性能要求,定义若hAB高于开沟器整形面高度h1,称装置回土性能满足设计要求。
(2)对靶率
对靶率表征装置的对靶施肥性能,判定方法依据液肥深施农艺要求“侧5深8”,以玉米植株为圆心,半径50 mm作圆,在此区域内施肥均为对靶施肥;超出此区域则为误施或漏施,对靶施肥判定方法如图28所示。
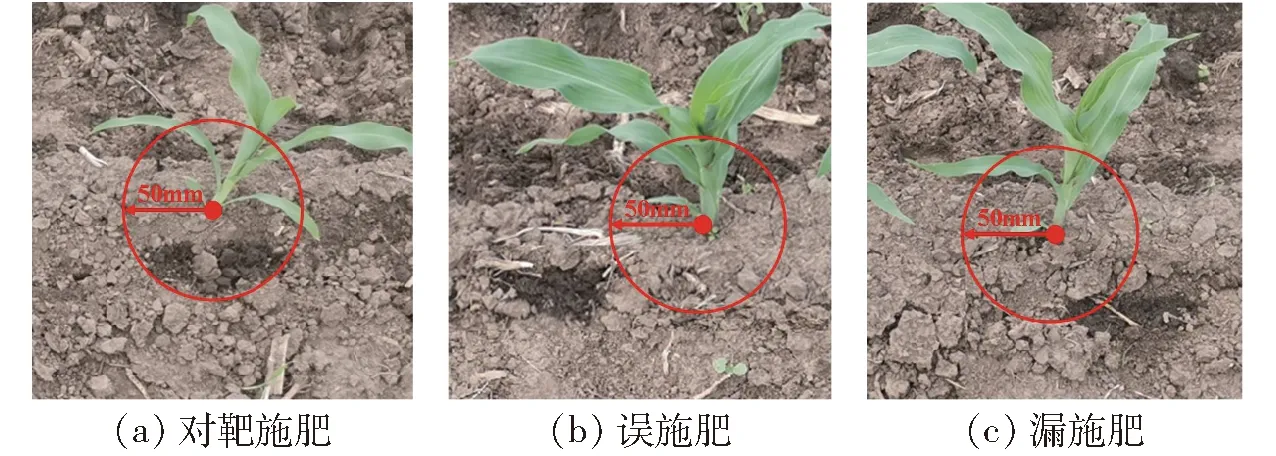
图28 对靶施肥判定方法
对靶率统计方法为在每个测试小区内分别统计对靶施肥的植株,用对靶施肥植株数除以测试小区内总植株数,即为每一测试小区内对靶率。在同一速度下,分别计算试验区内4个测试小区对靶率并取平均值,即为此试验区的对靶率。
5.3 田间试验结果与分析
记录作业前后每个测试小区内回土深度和对靶率,每组水平试验重复3次,测试结果取平均值作为试验结果。田间试验结果见表2。

表2 田间试验结果
由表2可知,深施型液肥对靶点施装置的平均回土深度为52.8 mm,平均对靶率为84.03%。回土深度随着作业速度增加先增大后减小,对靶率随着作业速度增加先增大后降低。当作业速度增加时,回土深度先升高后降低。在速度0.4~0.6 m/s范围内,速度较低时,开沟器各曲面结构挤压土壤导致土壤粘结不易回落,随着速度增加,开沟器滑切刃对土壤滑切作用增强,回土深度升高;在速度0.6、0.8 m/s时,回土深度较为稳定,分别为54.8 mm和54.1 mm。在速度1.0 m/s时,回土深度降低原因是随着速度增大,开沟时土壤外抛量增多,回土深度降低。
液肥对靶点施系统随着前进速度增加,对靶率先升高后略有降低,原因是在速度0.4 m/s时,喷肥针到达施肥区域的时间超过系统响应时间,导致系统提前施肥。当速度为0.6~0.8 m/s时,对靶率较稳定。随着作业速度达到1.0 m/s,由于作业速度较快,喷肥针到达施肥区域时间略短于系统响应时间,导致施肥滞后,对靶率降低。田间试验结果表明深施型液肥对靶点施装置回土覆肥性能较好,液肥点施系统运行稳定,作业满足装置设计要求。
6 结论
(1)设计了一种深施型液肥对靶点施装置,该装置检测植株位置并依据植株位置进行液肥定点深施。该装置对靶施肥性能稳定,液肥覆埋效果较好,满足液肥深施作业要求。
(2)设计了液肥深施开沟器,构建了开沟器与土壤间力学接触模型,解析了土壤回落原理,确定了开沟器结构参数,提出了液肥深施开沟器性能要求,应用EDEM验证了液肥深施开沟器结构的可行性。
(3)利用光电传感器和电磁阀的协同作用,设计了一种液肥对靶点施系统。光电传感器检测作物植株位置,测速模块监测前进速度,实时调节电磁阀开启时机,以保证施肥位置满足液肥深施农艺要求。
(4)田间试验表明,深施型液肥对靶点施装置平均回土深度为52.8 mm、平均对靶率为84.03%,回土覆肥和对靶施肥作业性能稳定。
