运用步态分析系统评估下肢康复机器人对脑卒中偏瘫患者步态的临床疗效
2023-01-04余洪俊谭小丹谢晶晶雷蕊绮
黄 悦,余洪俊,谭小丹,谢晶晶,雷蕊绮,任 林
(重庆医科大学附属第三医院/捷尔医院康复医学科,重庆 401120)
脑卒中是全球常见的致死原因[1]。卒中后步态异常会降低患者的功能独立性,限制其日常生活和社会参与能力,降低了生活质量[2]。30%~40%的脑卒中患者经系统康复治疗后仍存在下肢运动功能障碍,甚至丧失步行能力[3]。目前,患者下肢运动功能的康复多依赖治疗师一对一或多对一的训练,难以满足高强度、个性化训练需求,且疗效难以得到客观评价。
下肢康复机器人基于“神经可塑性”原理,通过带动下肢进行标准、高频、准确的步行训练,刺激神经系统重塑,纠正异常步态,恢复行走功能。同时,帮助固定的患者以接近正常的速度练习步态运动,并且以更规律的步态进行训练,与减重支持系统比较,其可以帮助患者在更长的时间内独立于物理治疗师的手动努力[4]。据文献报道,卒中患者在前3个月内接受下肢康复机器人联合康复治疗比单独接受常规康复治疗者更有可能实现独立行走[5]。由于脑卒中患者多存在特殊的偏瘫步态,针对偏瘫的临床研究应主要观察不同病程中髋、膝和踝等关节的表现,其康复效果的评估包括步态参数、卒中相关量表等[6]。近年来,因脑卒中失去行动能力的患者不断增多,下肢运动障碍严重影响了患者的生活质量,安全、有效地恢复其运动功能至关重要。因此,本研究运用步态分析系统比较了下肢康复机器人联合康复疗法与单独常规康复疗法对步态的影响,现报道如下。
1 资料与方法
1.1资料
1.1.1一般资料 选取2021年7月至2022年4月本院收治的脑卒中后偏瘫患者53例作为研究对象,将拒绝尝试下肢康复机器人治疗者(对下肢康复机器人不了解且拒绝尝试者、门诊患者治疗时间有限)设为对照组(15例),尝试下肢康复机器人治疗者设为观察组(38例)。对照组患者中男11例,女4例;年龄50~81岁,平均(70.00±8.73)岁;脑梗死6例,脑出血9例。观察组患者中男26例,女12例;年龄46~80岁,平均(68.92±8.03)岁;脑梗死23例,脑出血15例。2组患者性别、年龄、病程、病变类型、偏瘫侧等一般资料比较,差异均无统计学意义(P>0.05)。见表1。本研究经本院医学伦理审查委员会审批。

表1 2组患者一般资料比较
1.1.2纳入标准 (1)符合脑血管病分类与诊断标准[7],经头颅CT或磁共振成像检查确诊为脑梗死或脑出血;(2)病程小于1年的临床诊断为脑卒中;(3)首次脑卒中;(4)重度步态障碍的依赖行走(功能性步行量表评分小于2分);(5)具有足够的认知功能理解程序并在选择程序前提供书面知情同意书;(6)适合机器人套装(悠行外骨骼机器人UGO200)的体型(身高155~190 cm,体重小于或等于100 kg);(7)下肢活动度:膝关节屈曲小于90°,膝关节屈曲挛缩大于10°,髋关节屈曲挛缩大于25°,踝关节屈曲挛缩大于15°。
1.1.3排除标准 (1)可能影响自主神经或平衡功能的小脑或脑干病变;(2)涉及下肢的肌肉、骨骼疾病,如严重疼痛性关节炎、骨质疏松症、截肢或关节挛缩等;(3)其他并发神经系统疾病,如帕金森病、多发性硬化症等;(4)不受控制的心血管或呼吸系统疾病;(5)使用起搏器;(6)认知功能障碍(精神状态评估表评分小于或等于21分)。
1.2方法
1.2.1治疗方法 2组患者均给予基础药物治疗加常规康复治疗。常规康复治疗均由熟练且经验丰富的物理治疗师进行,基于Bobath开发的神经发育技术,根据患者的功能状态,训练任务包括姿势控制、改善关节活动度、抗痉挛、坐立平衡训练、主动转移、传统步行训练等。职业训练包括上肢的伸展和加强锻炼,以及针对日常生活能力的任务导向治疗、精细运动训练和感觉运动恢复。同时,指导患者的陪护人员配合治疗师参与康复训练。每天1次,每周6次,共治疗4周。观察组在常规康复训练基础上再接受下肢康复机器人辅助步态训练,每天2次,每次30 min,每周6 d,共治疗4周。下肢康复机器人是由控制背包、电池、腿部总成、肘杖、记录软件和控制背包电池充电器组成的下肢康复训练设备。采用绑带将患者固定在设备主体上,由设备主体带动患者进行康复训练。
1.2.2评估方法 由同一名医师采用WALKERVIEWTM步态分析系统评估2组患者治疗前和治疗后4周步态时空参数(包括步长、步频、触地时长等)及关节运动学参数(膝关节活动度等)。

2 结 果
2.12组患者治疗前和治疗后4周步态时空参数及关节运动学参数比较 2组患者治疗前步频、步长、触地时长、重心垂直位移、膝关节活动度比较,差异均无统计学意义(P>0.05);2组患者治疗后4周步频、步长、双侧膝关节活动度均较治疗前明显改善,且观察组患者治疗后4周步频、双膝关节活动度及双膝关节最大活动度均较对照组改善更明显,差异均有统计学意义(P<0.05)。见表2。

表2 2组患者治疗前和治疗后4周步态时空参数及关节运动学参数比较
2.2偏瘫患者重心垂直位移 脑卒中偏瘫患者重心向前运动轨迹形状参差不齐。见图1。
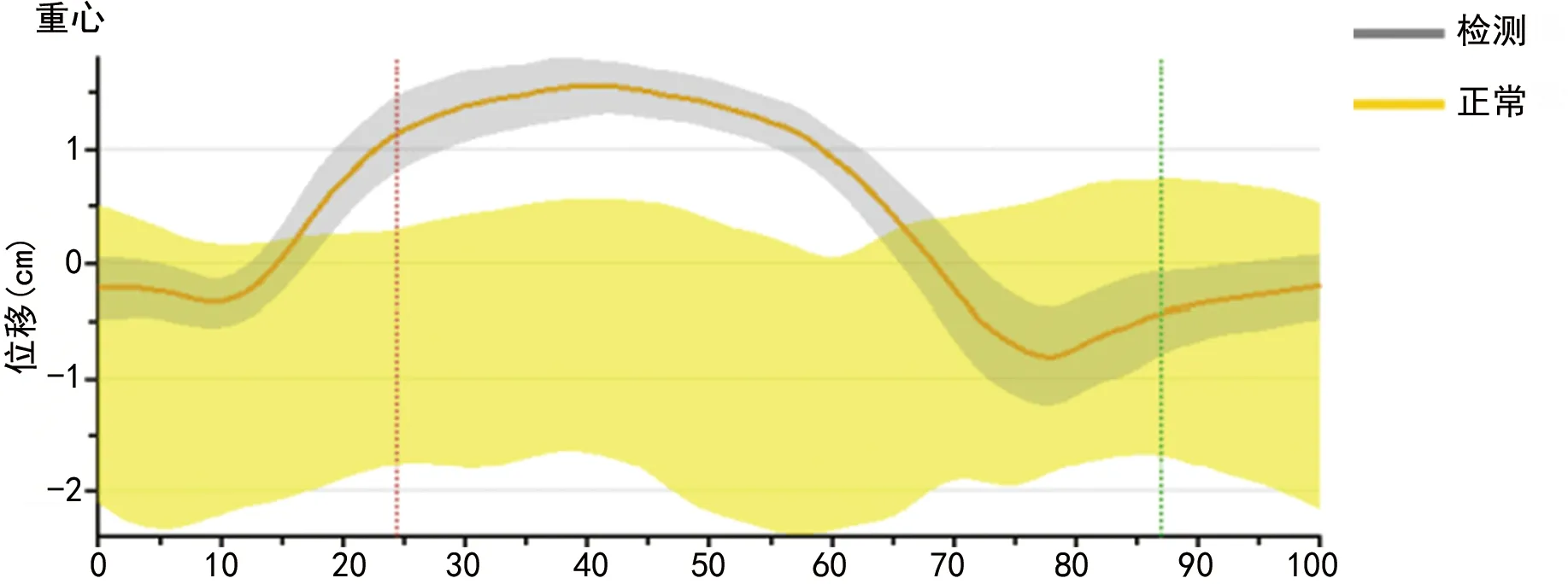
图1 偏瘫患者重心垂直位移
3 讨 论
近年来,随着脑卒中发病率增加,卒中后下肢运动障碍、步态异常者逐渐增加,下肢康复机器人辅助步态训练是一种安全、密集且针对特定任务的重复练习,可帮助下肢运动障碍的卒中患者重新获得运动协调能力。然而相比于下肢康复机器人,患者对物理治疗师的手法治疗信任度及接受度更高,基于此,本研究运用步态分析系统评估脑卒中偏瘫患者的步态,并比较下肢康复机器人联合常规康复治疗与单独常规康复治疗对脑卒中偏瘫步态的改善效果。结果显示,下肢康复机器人联合康复治疗与单独常规康复治疗均能改善卒中患者的偏瘫步态,而下肢康复机器人结合康复治疗比单独常规康复治疗在改善脑卒中偏瘫步态方面效果更佳。
人类步态是最基本的身体运动之一,形成独特的、重复的模式。正常步态的3个特征是步长适当、身体平稳和耗能减少,而偏瘫步态往往行走不对称、行走路径倾斜、稳定性差、耗能增加[8]。步长是从一侧足跟着地处至另一侧足跟着地处之间的线性距离,健康成年人步长为50~80 cm,偏瘫患者步长明显短于健康者[9],本研究结果也支持这一结论。步长除取决于种族、性别、年龄、身高等因素外,主要受患者发病时间长短和康复进程影响[10]。有研究表明,偏瘫患者步长较短的主要原因是偏瘫侧下肢肌力降低、摆动初期地面推进力不够、足离地及摆动初期屈髋力量差、偏瘫侧摆动末期减速快、健侧支撑期髋关节伸肌过度活动等[11]。本研究结果显示,下肢康复机器人辅助步态训练联合康复治疗与单独常规康复治疗均能改善脑卒中偏瘫患者的步长,使步长接近正常范围,而有下肢康复机器人介入治疗的观察组患者步长得到更明显的改善。下肢机器人这种带有强制性的步态训练方法通过强迫运动,促使患者努力迈步,使其步长提高,同时,又会增加步速。本研究观察组患者步长、步频改善更为明显,使观察组患者治疗后步幅变大、步速变快、稳定性增加,从而进入步态参数相互促进的良性循环,说明下肢康复机器人治疗对偏瘫患者步态改善具有积极影响。
人体下肢的活动主要在矢状面进行,要关注的是髋关节和膝关节的屈曲、伸展活动。膝关节的屈曲将有效提高步态的协调有效性[12]。支撑相时屈膝可使重心在垂直方向的运动变得更加平缓;摆动相时屈膝使摆动侧肢体的垂直长度变短,以帮助足在地面上的廓清。临床发现,偏瘫患者在患侧支撑时髋关节常不能伸直,持续地以屈髋状态行走,再加上膝关节控制较差,常游走在膝过伸和膝过屈两个极端。髋关节过屈时膝关节常发生继发性屈曲畸形,加重步态异常。有研究表明,偏瘫患者下肢3个关节的活动度均比健康者小,且髋、膝、踝关节角度变化可用于评估偏瘫水平[13]。另有研究发现,当偏瘫患者被要求走得更快会增加髋关节屈伸角度和膝关节屈曲角度[14]。卒中患者偏瘫侧的肌张力增高、肌力下降及关节挛缩是导致患侧伸髋、屈膝受限的主要原因。有研究发现,下肢运动功能与髋、膝关节活动度均呈正相关,表明下肢康复机器人训练对脑卒中偏瘫患者运动功能恢复具有显著促进作用[15]。每次30 min的下肢康复机器人训练增加了患者下肢被动负重的能力,而外固定设备是按健康者步行角度设置的,再加上足部固定支持带的拉伸,可帮助偏瘫患者摆脱髋、膝、踝关节活动度小的偏瘫下肢伸肌运动模式,从而促进髋、膝关节的分离运动。本研究结果显示,观察组患者治疗后4周患侧髋关节、膝关节屈伸活动角度均明显优于对照组,表明下肢外骨骼机器人训练相比于常规康复治疗更有利于提高偏瘫侧髋、膝活动角度,使患侧具有更强的廓清能力,对摆动期表现出有利影响。
人体平衡是指在运动或受力时通过调整重心维持姿势稳定的能力。人体失衡将不能维持正常的步态。偏瘫患者步行时主要表现为大范围的躯体侧方移动和骨盆旋转、小范围的垂直运动和躯体运动的不对称及重心偏移、重心摆动系数增大等[16]。在步行过程中躯体运动的控制能力是评价步态稳定性最有价值的指标,主要包括身体重心的侧方和垂直移动,以及骨盆的旋转、前后倾斜和左右倾斜运动[17]。步行运动的完成取决于重心能否控制在支撑面内[18]。有研究表明,步态周期中身体重心侧方移动、偏瘫侧髋关节伸展和膝关节屈曲等三维运动学参数异常是影响脑卒中患者步行能力恢复的主要因素[19]。通常当人类站立时重心位于骨盆或肚脐的前面,在改变姿势或移动身体的过程中移动。在正常的步行过程中沿X轴(从后到前的方向对齐)重心线性向前移动。然而卒中偏瘫患者重心向前运动不那么清晰,轨迹形状参差不齐,造成这种现象的原因是身体的平衡不稳定。考虑到重心在Y方向的轨迹也不同,这种差异源于整体力线的偏移,导致患者行走的不稳定性。在Y轴方向髋关节相对骨盆的额外旋转将改变步态模式,允许跨步长增加和重心摆动的幅度减少,提示这些可使重心平缓行进及行走中减少唐突转移出现。机械能的转移需要重心的波动,从而减低步行中的能量消耗。而步行中最小化身体重心的位移可节省身体的能量。卒中患者只有调整重心保持身体平衡,才能恢复行走能力[20]。
本研究有几个局限性:(1)最严重的是评估的受试者数量相对较少,这不足以概括下肢康复机器人的效果。确认本研究结果并确定两种治疗类型的差异将需要未来更多参与者的研究。(2)干预时间较短,未进行长期随访;因此,尚无法评估下肢康复机器人对步态的长期影响。
综上所述,下肢康复机器人联合常规康复治疗与常规康复治疗均能改善脑卒中偏瘫患者的步态,而前者比后者在改善脑卒中偏瘫步态方面效果更好。然而尚需更长期随访的进一步大规模研究进一步探索下肢康复机器人对卒中后步态改善的影响。
