地下金属矿凿岩台车自动控制系统设计
2023-01-03杜富瑞张元生
杜富瑞,张元生,战 凯
1.矿冶科技集团有限公司,北京 100160;2.矿冶过程自动控制国家重点实验室,北京 102628
金属矿产资源为人类社会发展提供了坚实的物质保障和能源保障,在国民经济生活中扮演着不可或缺的重要角色[1]。近20年来,随着高强度开采的持续,已有大量的大中型露天矿转入地下开采。随着越来越多新地下矿的开发,为了满足未来矿山智能化、无人化[2-3]的发展要求,巷道开拓掘进技术及掘进装备的研究应得到更多的重视。凿岩台车是地下金属矿重要无轨采矿装备,用于钻爆法施工时炮孔或锚杆孔的穿孔。传统的凿岩台车进行作业时,台车驾驶员处于碎石迸溅、高温潮湿的危险作业环境下,劳动强度大且存在一定的安全隐患。面对矿井恶劣工况,如何提高凿岩台车工作效率及安全性,是未来矿山发展需要解决的问题。
本文以传统有人驾驶凿岩台车为研究对象,利用自动控制、高速通信网络、井下空间三维建模等相关理论和技术,构建了凿岩台车远程遥控自动控制系统。利用高速通信网络,操作员可以在地面监控中心实时监测凿岩台车工作状态,操作井下凿岩台车进行凿岩作业,实现井下凿岩台车的远程“遥测、遥动、遥控”。与传统有人驾驶凿岩台车相比,远程遥控凿岩台车在钻孔精确度、钻孔效率、人员安全性、环保指标等方面的技术优势明显。
1 凿岩台车车体结构及工作流程
凿岩台车用于在地下金属矿矿体掘进作业过程中炮孔的布孔作业,为了适应井下狭窄受限空间作业环境,凿岩台车通常选择铰接式车体结构。作为铰接式车辆,凿岩台车由前后车体通过车体中间的铰接销轴连接组成,前车体主要由推进梁、凿岩机、大臂、操作台、驾驶台等构成,后车体主要由液压系统、发动机、传动部分、供电系统等构成,凿岩台车结构如图1所示。铰接式车体结构可以保证前车体与后车体既可以在同一水平面内运动,又可以在垂直面内运动。通过改变布置在中央铰接点处的液压油缸中活塞杆形成的方式,凿岩台车实现前后车体“折腰式”相对运动。近年来,随着人工智能特别是智能矿山技术的发展,使得采矿无轨装备智能化改造具备了技术基础。通过加装激光雷达、摄像机、惯导单元等智能感知系统,可以使凿岩台车具备智能化作业功能。
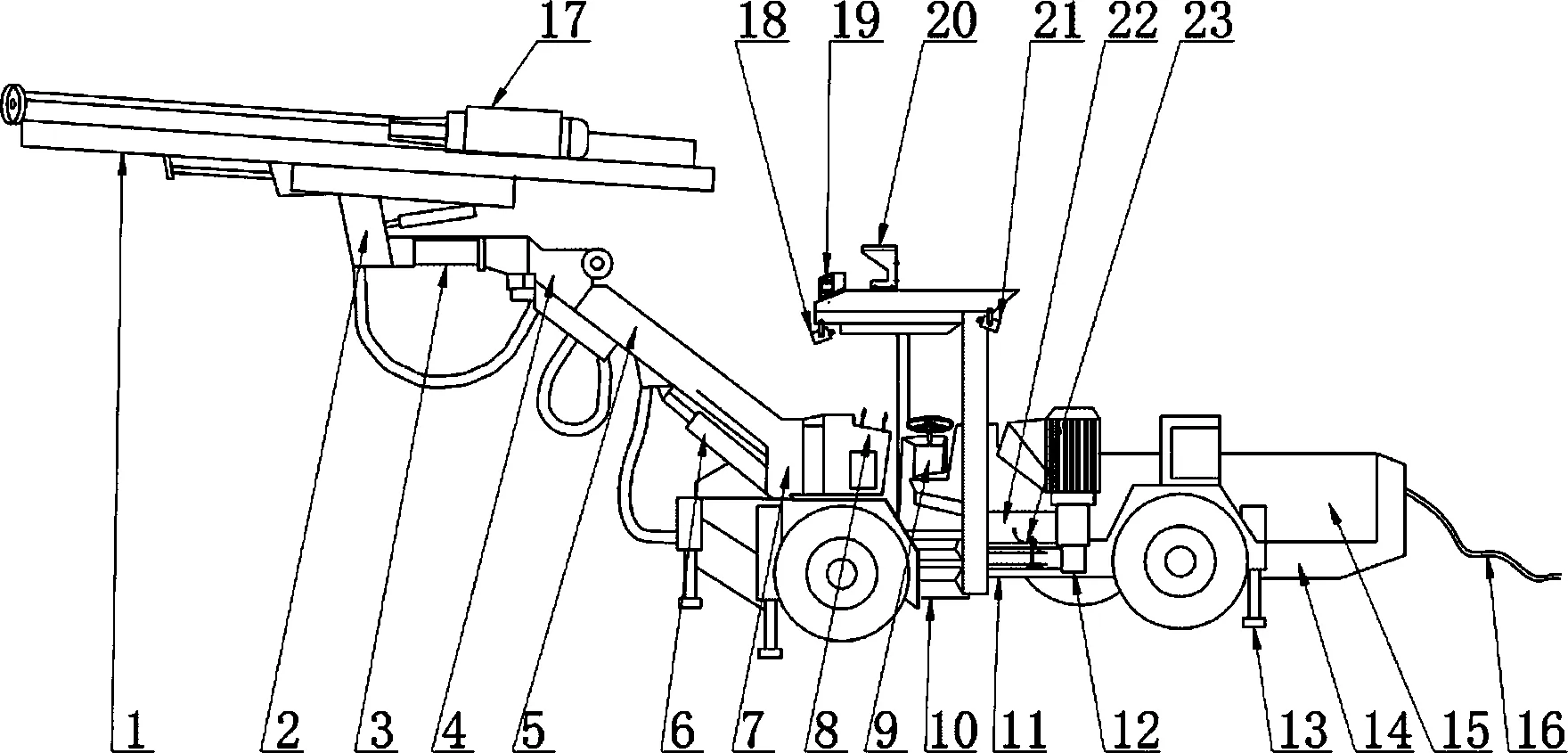
1—推进梁;2—推进梁转角马达;3—推进梁翻转马达;4—推进梁调平臂;5—大臂;6—仰俯油缸;7—大臂摆动机构;8—操作台;9—驾驶台;10—前机架;11—中央铰接;12—液压系统;13—车体定位部分;14—后机架;15—发动机;16—交流供电系统;17—凿岩机;18—前摄像头;19—激光雷达;20—惯导单元;21—后摄像头;22—转角传感器;23—测速传感器。图1 凿岩台车结构
在地下金属矿钻爆法施工中,利用凿岩台车制作炮孔装填炸药进行爆破作业。为了保证岩体爆破效果,需要做炮孔布孔设计,如图2所示。布孔设计是根据不同的爆破参数在巷道断面上布置相应的炮孔,爆破参数需要根据矿体岩石性质及巷道工作面尺寸设定。根据功能和位置的不同,炮孔可分为周边孔、掏槽孔和辅助孔[4-5]。周边孔是工作面最外一圈沿巷道轮廓布置的炮孔,故又称轮廓孔,其作用是控制巷道断面爆破之后的轮廓,使断面形状和方向符合设计要求。掏槽孔的目的是在一个工作面上首先爆破出一个槽腔,合理的掏槽孔设计可以为爆破创造有利条件。常用的掏槽形式可分为直孔掏槽、斜孔掏槽和混合掏槽;辅助孔的作用是进一步加大爆破量和掏槽体积,需要设计人员根据现场工况和经验手动设计调整。
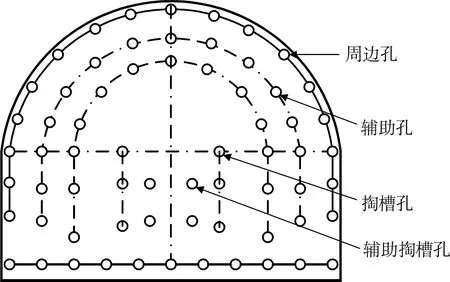
图2 炮孔布置
2 系统组成
凿岩台车自动驾驶系统主要由云计算系统、地面远程监控平台、无线网络通信系统及车载智能控制系统组成,系统架构如图3所示。云计算系统通过云服务器进行台车状态数据管理、自动布孔设计、钻爆结果评估优化及作业数据三维可视化,操作员可以通过电脑客户端、手机客户端登录云服务器进行操作,云计算系统可以与矿山生产管理系统实现数据对接共享。地面远程监控平台采用中心式监控模式,主要由监控上位机构成,操作方式通常为一对一操作,即一台操作装置对应一台台车;在特殊工况下,可以实现一对多切换操作。远程操作平台采用与车载操作设备类似的操作接口,包含显示屏幕、键盘鼠标、操作手柄、功能按钮等设备;可以展示车载摄像机图像和车辆状态数据、布孔图设计数据。地面远程监控平台利用手柄及按钮,可以实现远程控制凿岩台车行驶、支腿固定、臂架动作等功能。

图3 系统架构
无线网络通信系统用于凿岩台车与地面监控平台之间的远程通信。通信系统硬件主要由车载式无线通信终端、工作区域无线网络AP、长距离光纤通信系统、地面监控平台通信终端等组成。凿岩台车在无线网络覆盖范围工作区域内可以自由移动,通过车载无线通信终端接入无线网络,使得台车可以与监控中心远程通信。无线网络采用高速Wi-Fi组网,在井下台车工作范围内每隔一段距离布置一个无线网络AP,多个AP通过无线桥接连接,通过多个AP组成无线网络。长距离光纤通信系统用于有线连接工作区域无线网络与地面监控平台,以保障网络通信的高速和低时延。地面监控平台的监控系统和操作装置分别与通信终端相连。无线网络通信系统软件主要包含台车端通信软件、地面监控平台端通信软件,以及网络通信系统控制软件。
机载智能控制系统的硬件主要由机载计算平台、车辆专用控制器、人机交互平台、激光雷达、油缸长度传感器、马达角度传感器等组成,如图4所示。机载计算平台主要负责自动驾驶系统算法的运行,包含巷道三维模型生成、臂架位姿计算及臂架运动指令计算。车辆专用控制器主要负责根据计算平台的指令和传感器反馈控制电液比例阀,使油缸和马达运动到指令要求位置,为自动驾驶系统的执行层。人机交互平台主要负责人机交互,主要功能包括显示凿岩孔位及车辆工作状态、各种工作参数输入、故障诊断显示和运行数据记录。激光雷达及各种传感器主要负责数据采集和位置监控,为自动驾驶系统的感知层。机载智能控制系统的软件主要包含巷道激光雷达扫描软件、三维模型生成软件、臂架位姿计算软件、臂架多关节计算软件、油缸位置闭合控制软件、马达位置闭合控制软件、人机界面软件等,分布于系统各个硬件中。
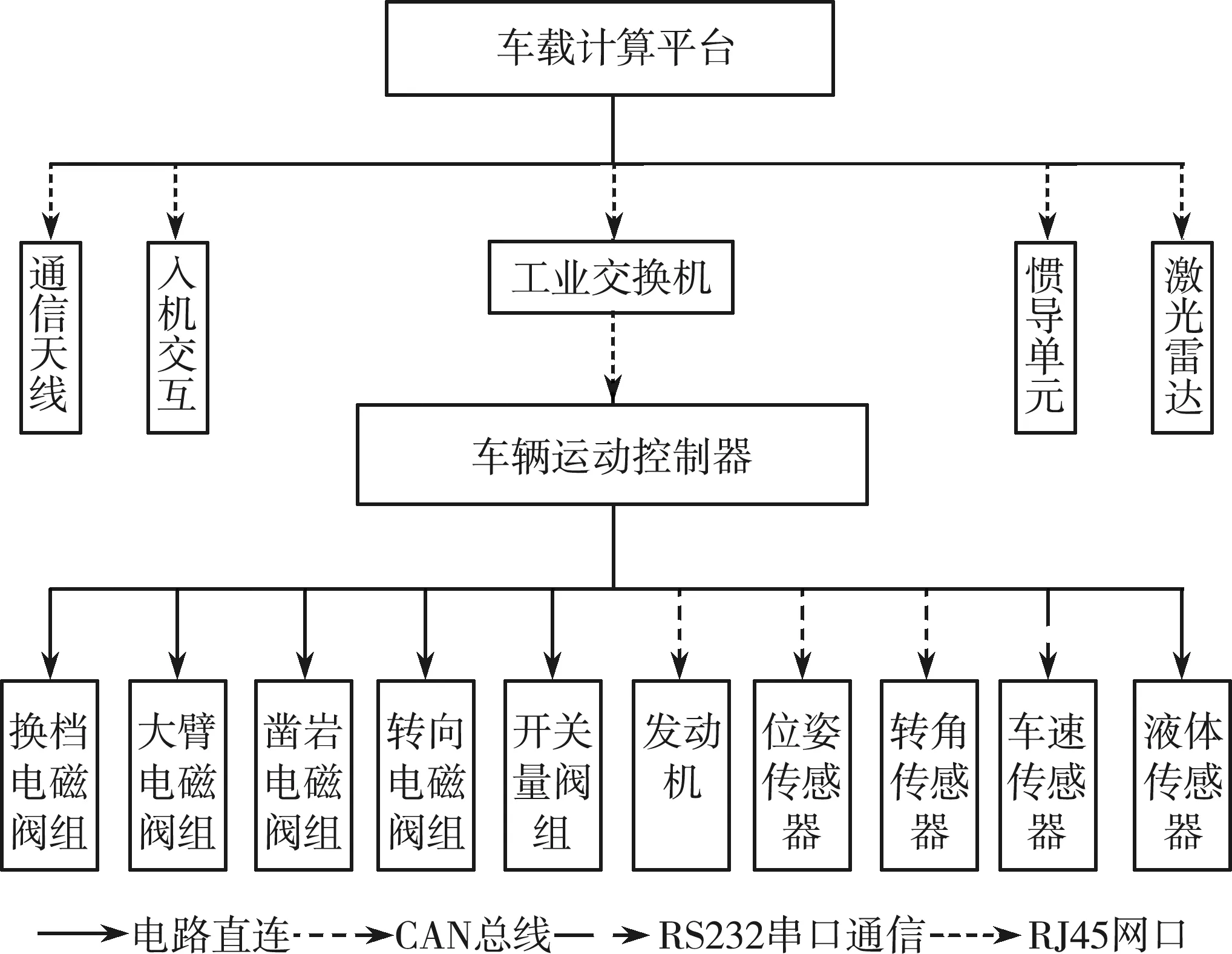
图4 车载控制系统
3 系统功能
凿岩台车自动控制系统具有巷道三维建模、炮孔自动布置、地面远程遥控、臂架自动控制、底盘自动驾驶、钻爆结果评估、数据三维可视化及数据云服务是等功能,主要功能如下:
(1)巷道三维建模功能的实现主要通过3D激光雷达和建模软件来实现。通过3D激光雷达对巷道进行实时扫描,利用扫描数据通过建模软件来实时生成巷道三维模型。巷道三维模型的主要用途是感知巷道空间结构,为布孔设计和臂架自动运行提供感知数据,它是钻孔作业自动化的基础,所有自动化无人化功能都建立在巷道三维模型上,如图5所示。
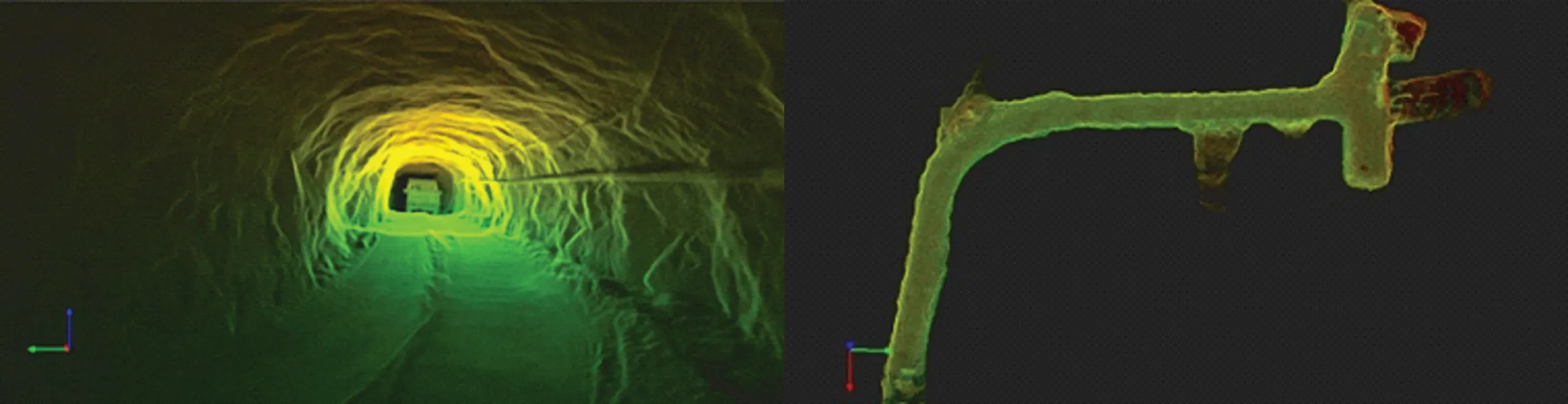
图5 井下三维空间建模
(2)自动布孔设计的主要目的是生成布孔图。通过巷道三维模型,提取掌子面实体,形成掌子面图形,在该掌子面图形上,根据爆破模式和钻孔策略自动生成布孔图。布孔图生成后,在显示屏上显示处理以供操作人员检验审核。在特定条件下,由于环境的复杂性和策略的多样性,生成的孔位可能存在不合理性,操作人员可手动更改不合理的孔位。布孔图设计是一项复杂的工程,与工程施工经验是否丰富、钻爆数据是否充足、岩石和钻爆模型是否合理及设计算法是否先进等多种因素相关。自动布孔设计如图6所示。

图6 自动布孔
(3)自动控制的凿岩台车最终能否精准定位,有赖于钻臂能否精准到达预定位置,而钻臂的精准到达依赖于电气液压系统的稳定、快速工作[6-7]。臂架自动控制分为决策层和执行层。决策层的主要目的是自主选择目标孔位,并根据孔位和系统多传感器感知融合计算结果得到的臂架实际位置,计算臂架运行轨迹,并根据运行轨迹计算各臂架的目标位置,将各目标位置发送给执行层。执行层收到目标位置后,根据实际位置反馈,通过PID闭环控制计算比例阀电流大小,控制比例阀开口度。由于凿岩台车的臂架为多关节多自由度系统,因此传感器感知融合、臂架运行轨迹和各臂架目标位置计算都必须通过非常复杂的软件算法才能实现。
(4)凿岩台车远程遥控操作是利用远程操作装置和无线通信系统,实现地面远程操作井下凿岩台车。通过安装在台车上的多个摄像头将视频信号实时传回到监控中心并显示在屏幕上,操作人员根据视频图像发出远程控制指令,凿岩台车根据控制指令进行相应的动作。井下环境多粉尘且潮湿,摄像机镜头容易被粉尘遮盖挡住视线,需要摄像机旁边增加清洗装置。操作人员不仅要观察摄像头画面,还需要观察激光雷达实时扫描出的实时点云图远程驾驶台车行驶。当台车距离巷道壁太近时,远程操作系统将发出警报,并在达到设定的限制值时强制停车。凿岩台车远程遥控如图7所示。

图7 地面远程遥控
(5)钻爆结果评估及设计再优化是台车自动控制系统的高级功能,具有自学习功能。通过评估及再优化,自动控制系统将对爆破后掌子面进行分析,根据分析结果优化岩石和爆破模型参数,布孔设计根据优化的参数设计优化后的布孔图,根据优化后的布孔图爆破后重复本过程,不断循环迭代优化。
(6)作业数据三维可视化是将各种实时采集的作业数据进行融合并三维展示。各种作业数据未经三维可视化处理前,可读性差。利用三维可视化技术,爆破后的巷道三维模型可以直观的呈现出来,并且在三维模型上可以识别出爆破后效果较差的部分并突出显示。三维可视化数据可以作为智能矿山其他系统的基础数据,例如建立智能矿山巷道模型。作业数据三维可视化如图8所示。
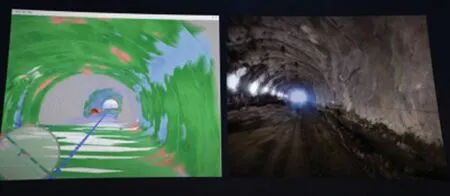
图8 数据三维可视化
4 结 论
传统有人驾驶凿岩台车,存在劳动强度大及安全风险高的问题。如何在井下恶劣工况中提高凿岩台车工作效率及安全性、降低劳动强度,是制约井下采矿的瓶颈问题。以传统有人驾驶凿岩台车为研究对象,创建了由云计算系统、地面远程监控平台、无线网络通信系统及车载智能控制系统构成的凿岩台车自动控制系统,系统具备巷道三维建模、自动布孔、臂架自动控制、远程遥控、底盘自动行驶、钻爆结果评估、作业数据三维可视化等功能。使用智能化凿岩台车,除了具有打孔速度快、安全,能够改善环境条件的优点外,还具备钻孔质量好[8-10]、工人劳动强度低[11-12]的优势。矿山智能化是未来矿山发展方向,智能化凿岩台车是智能矿山的重要装备支撑。
