DP-2动力定位船舶故障模式与影响分析
2023-01-03曲兆源
曲兆源,文 武
应用研究
DP-2动力定位船舶故障模式与影响分析
曲兆源1,文 武2
(1. 中海油能源发展采油服务公司,天津 300451;2. 武汉船用电力推进装置研究所,武汉 430064)
故障模式与影响分析对动力定位船舶的安全性和可靠性有重要的影响,本文以中海油海洋石油791海底管道巡检船为例,介绍了DP-2动力定位船舶的设备配置与主要功能,同时对船舶的故障模式与影响分析(FMEA)进行了研究。
DP-2 动力定位 故障模式与影响分析
0 引言
动力定位系统(Dynamic Positioning System)简称DP系统,是上个世纪70年代逐渐发展起来的,并逐步由浅水海域向深水海域发展,目前广泛应用于各种海洋工程、海上科考、风电安装运维、水下工程等领域[1]。在国内海洋工程领域,该系统已经成为多种类型海洋工程船舶的标准配置,面临的作业环境和工况也越来越复杂,因此对动力定位系统的可靠性也提出了更高的要求。
传统船舶、浮式生产平台的系泊主要采用锚泊系统,但随着水深的增加,锚泊系统的抓底力减小,抛锚的的困难程度增加,同时锚泊系统的锚链长度和强度都要增加,海上作业也变得复杂,造价和安装费用猛增,其定位功能也会受到很大限制。动力定位系统是一种闭环的控制系统,其功能是不借助锚泊的作用使船舶尽可能的保持在预订要求的位置上[2]。其优点是定位成本不会随着水深增加而增加,并且操作也比较方便,因此,动力定位系统在船舶和浮式生产平台上的应用也越来越广泛。
不同船舶类型对动力定位系统的要求也不同,本文以海洋石油791海底管道巡检船为分析对象,针对动力定位系统的主要配置、主要功能和故障模式与影响分析(FMEA)进行了研究和介绍。
1 海洋石油791动力定位系统配置
1.1 海洋石油791船型简介
海洋石油791是国内第一艘现代化的专业用于的海底油气管道定期巡检、详细调查和应急处理等工作的调查船。其主要功能是对海底管道的路由变化、外部损伤、腐蚀情况、第三方破坏进行调查。本船安装有升降鳍板,升降鳍板底部搭载若干声学测量设备,工作时升降鳍板下探至船底2.5米以下,利用声学测量设备对海底油气管道进行探测,必要时可下放随船携带的ROV(水下机器人),悬浮在管线上方,可以对海管进行更加细致的扫描。
1.2 海洋石油791船型简介
海洋石油791装备船舶动力定位系统,取得了中国船级社DP-2的附加标志,可以在以下环境条件下,使得本船停留在设定的位置上,实现定点、定位和定向要求。
有义波高:1.5 m
表面流速:2.0 kn
风速:10.8 m/s
海洋石油791为电力推进船舶,机舱配有4台主发电机组作为全船主电源,为全船用电设备供电。
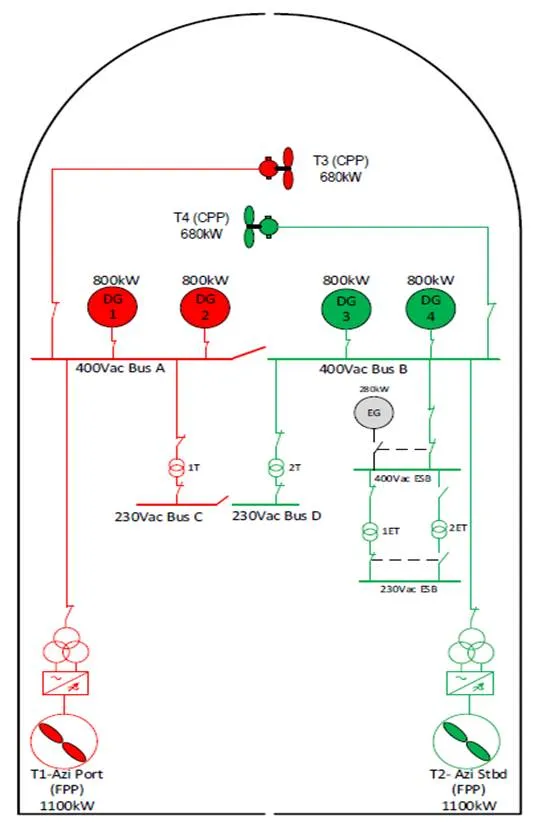
图1 海洋石油791电力系统配置图
机舱集控室配有一套主配电板,作为接收和分配电能的电气装置。主配电板汇流排联络屏设有母联开关,将主配电板汇流排分为两段。在非DP工况时,母联开关闭合,两段汇流排合成一个整体,为全船所有用电设备供电;在DP工况时,母联开关断开,发电机组左右分区,两两并车,为各自汇流排供电。海洋石油791电力系统配置图如图1所示。
本船在主配电板内设有功率管理系统,对4台主发电机组进行管理,并具备报警和保护功能。本船功率管理系统由2 组完全冗余设计的S7-400系列PLC 组成,配置有2个同步模块,通过光纤进行实时同步通讯,两套S7-400独立运行并互为备用。一套S7-400将在电站管理装置中发挥主控制站的功能,另一套做为备用控制站保持运行。一旦主用控制器出现故障,备用S7-400将被自动切换成主用控制器,满足DP-2热冗余操作要求。
在DP工况时,船舶电站能在功率管理系统管理下,母排自动分段运行、负荷自动分区,确保在一侧母排短路的情况下,确保一主推和侧推能个正常工作,以此提高系统的冗余性。海洋石油791功率管理系统网络图见图2。
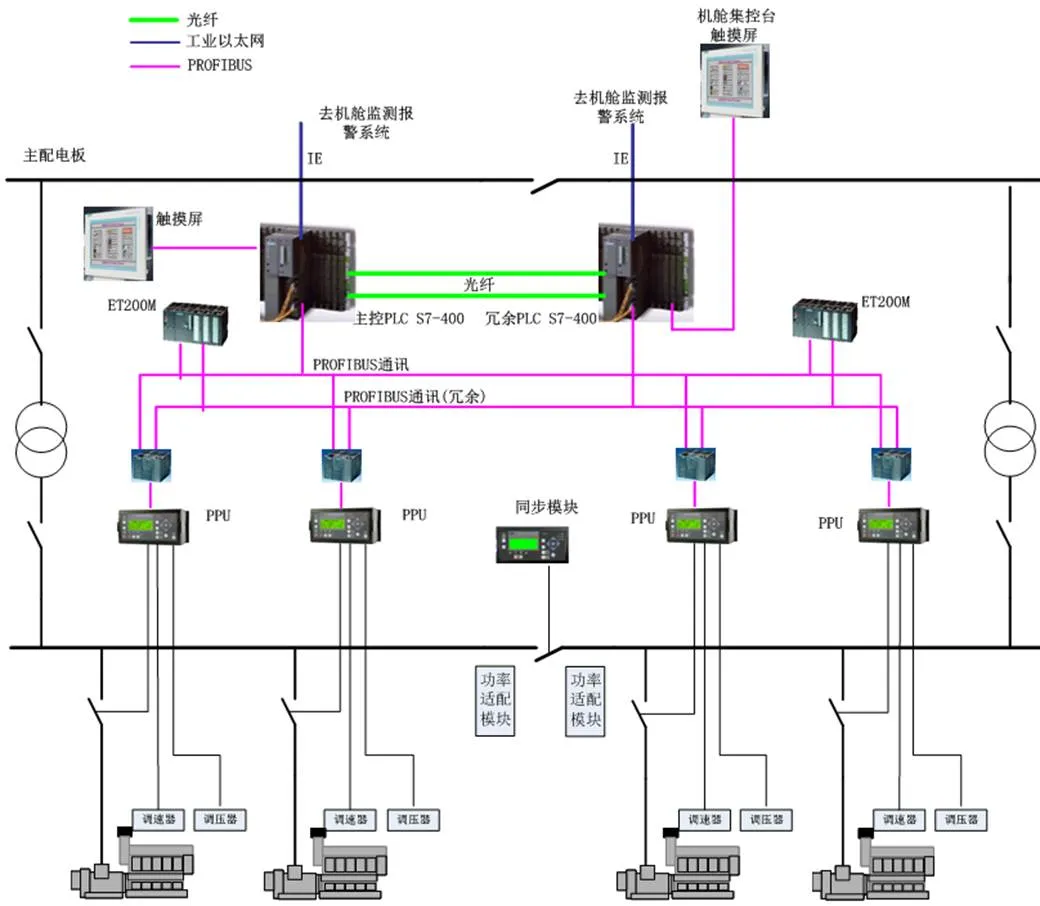
图2 海洋石油791功率管理系统网络图
1.3 海洋石油791推进器系统配置
推进器系统是动力定位系统的一个组成部分,用于产生力和力矩,来抗衡作用于船上的干扰力和干扰力矩。
本船艏部配有两台管隧式侧向推进器,为船舶提供侧向推力(见图2 T3、T4);船艉左右各配有一台全回转推进器,为全船提供360°推力(见图2 T1、T2)。上述四台推进器均由主发电机组供电。DP工况时,主配电板汇流排母联开关断开,1#发电机组DG1和2#发电机组DG2并联运行,通过BusA汇流排为1#艏侧推(T3)和左全回转推进器(T1)供电;同理,3#发电机组DG3和4#发电机组DG4并联运行,通过BusB汇流排为2#艏侧推(T4)和右全回转推进器(T2供电)。两台艏侧推及两台全回转推进器在DP工况时同时工作但又相互冗余,由于单个故障导致任意一台推进器丢失都不会导致船舶失位。
1.4 海洋石油791动力定位控制系统配置
海洋石油791动力定位控制系统由双冗余的控制器单元和操作站组成。控制器单元包含两台控制计算机,计算机系统用来接收来自传感器及位置参照系统的电信号,经过比较,计算处理后,向全回转推进装置、侧推装置发出一系列控制指令。计算机系统的公用设备如自检程序、数据传输及接口失效时,不会引起两个系统全部失效。当一套计算机系统失效时,可自动转换至冗余计算机系统进行控制。两台操作站包括船用计算机、控制面板及操作软件等,并配置一台报警打印机及两台容量满足30分钟连续使用的UPS。
本船配有一套独立的联合操纵杆系统(Joystick),对全回转推进装置和侧推装置进行联合操纵,使其达到最佳运行工况。另配一套便携式Joystick操作终端,在前驾控台及驾驶室两翼设有插座,以实现对船舶的灵活操控。联合操纵杆系统配有独立的UPS。海洋石油791动力定位系统配置如图3所示。
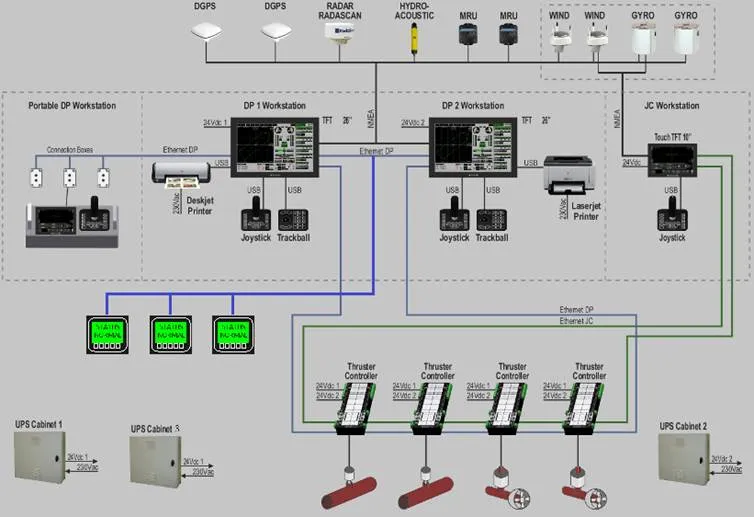
图3 海洋石油791动力定位系统配置
动力定位传感器系统主要分为位置参照系统和外部传感器系统。
一艘动力定位船舶能否顺利执行一项或几项任务,很自然的取决于动力定位系统所用的位置测量系统,要求以足够的速度和精度获取所需的信息,以便控制器计算出推力器指令,使船舶完成预定的任务。控制系统所需的信息包括船舶位置、艏向以及外部干扰力的信息[3]。位置参照系统会将上述信息传递给动力定位控制系统,当船舶偏离目标位置时,可自动发出听觉和视觉报警。对于DP-2附加标志的动力定位船舶,配备了3套位置参照系统。
海洋石油791动力定位位置参照系统配置如下:
1)DGPS系统
本船配有2套动力定位系统专用的DGPS(Differential Global Position System),DGPS是在GPS的基础上利用差分技术使GPS用户获得更高的定位精度,其精度通常可达0.5-1m每秒。本船2套DGPS安装于雷达桅上。DGPS卫星可从不同角度发送信号,但高大的物体(如风力发电机、海洋钻井平台、FPSO等大型船舶)可能会阻碍DGPS信号的接收,这种情况下需要使用其他位置传感器,如微波雷达定位系统[4]。
2)微波雷达定位系统
本船配有1套微波雷达定位系统,用于近距离精确测距。本系统利用微波雷达发射微波信号,测得雷达与固定目标反射器之间的距离来直接测得相对距离和方位。本船微波雷达安装在船舶的罗经甲板,雷达反射器可安装在如海洋钻井平台或FPSO等固定位置。
3)水下声呐系统
本船配有一套用于ROV跟随的水下声呐系统。水下声呐系统由安装于船舶底部可伸缩的收发器(HIPAP)与水下信标组成。当水下信标收到收发机发来的声频信号,立即启动发射装置,反馈一个信号给收发器。收发器收到信号后,它们之间的距离和方位就可以计算出来并传输给动力定位控制系统。水下信标安装于ROV上,从而实现船舶对ROV的跟随[4]。
上述3套位置参考系统采用不同工作原理,且在动力定位操作中可同时使用。
位置参照系统可根据运行条件、调度方式的限制和工作条件下期望的性能进行选择。不同的位置参照系统可相互校准。
外部传感器系统用于船舶姿态检测、环境风力检测以及航向检测。外力传感器系统包含运动传感器、风向风速仪和电罗经。
1)运动传感器
船舶在海上时,受到来自风、浪、和涌等外力,一般从6个自由度来考虑船舶受力:艏摇、纵荡、横荡、纵揺、横摇和垂荡(参见图5)。动力定位系统主要克服来自水平方向外力的影响,即:艏摇、纵荡和横荡;对于纵揺、横摇和垂荡并不能被动力定位系统所控制,但可通过运动传感器检测出来[4],并将信息传输至动力定位控制系统,由动力定位控制系统对其位置参照系统进行补偿。海洋石油791动力定位系统配有2个运动传感器,对船舶姿态进行检测。运动传感器需安装在振动小、且靠近船舶重心位置处。
2)风向风速仪
风是船舶在海上受到的一个主要外力,因此必须精确测量动力定位船舶所在海域的风速和风向。海洋石油791配有2台超声波式风向风速仪(与航行设备共用),满足动力定位系统对其精度与冗余度的要求。
3)电罗经
电罗经能够反映精确的船艏数据,本船配有两台电罗经,除船舶自动舵使用以外还为动力定位系统提供船舶艏向信号。两台电罗经一用一备,备用的电罗经处于热冗余状态,在出现故障的情况下,另外一台可以立即投入使用,从而能够确保定位系统的精确性。
2 海洋石油791动力定位系统的主要功能
海洋石油791动力定位系统主要用于船舶沿海底管线进行路由调查、ROV定点释放以及ROV自动跟随。本船动力定位系统主要包含以下功能:
2.1 自动定位功能
本船可通过动力定位操作站对目标位置坐标(相对坐标或绝对坐标)和艏向进行设置,确认后,船舶会从当前位置自移动到目标位置并保持,艏向也能自动保持到预设的艏向。当船舶偏离目标位置一定距离或预设艏向一定角度后,动力定位系统会发出声光报警。海洋石油791设置为偏离目标位置3米或偏离预设艏向3°即发出报警信号。
2.2 自动定位最小功耗模式
为了以节约燃料和避免推进器的磨损,海洋石油791可以在最小功耗模式下,即船舶在保持满足作业需求位置的前提下,推进器以最小的功耗工作。最小功耗模式分为风向标模式和定位圈模式。
在风向标模式下,动力定位系统会不断调整船舶艏向,使船艏正对外力方向,从而使推进器可以最小功耗保持船位。船舶艏向的方向是有外环境力方向决定的,主要是风和流的影响。
定位圈模式是指在允许船舶在一定范围内移动的前提下,以目标位置为中心设置定位圈,当船舶因环境外力影响移出定位圈时,动力定位系统会通过推进器将船舶移至目标位置。该模式可减少推进器的功率,从而达到节约燃料、减少排放的效果[5]。
2.3 自动航迹功能
海洋石油791可通过在动力定位操作站输入航点表或绘制航迹的方式,使船舶自动沿着预先设置的航迹航行。本船自动航迹航行功能主要用于海底油气管线的路由调查。此功能可大大减轻船员的工作强度并提高了工作效率。
2.4 目标跟随功能
海洋石油791动力定位系统目标跟随功能主要用于ROV跟随。在此模式下,船舶可与目标保持恒定的相对位置。船舶艏向可以是设定的航向也可以自动指向目标。此外,可以在目标周围设置观察圈,圈内船舶不移动,当目标移出圈外时,船舶即进行跟随运动。
2.5 联合操纵功能
本船的联合操纵功能通过独立的联合操纵杆系统(Joystick),实现对全回转推进装置和侧推装置的联合操纵。联合操纵杆可实现纵向推力、横向推力、转向力矩和这些推力分量的一切组合的控制,同时还具备可选择的自动艏向控制。在独立的联合操纵杆系统中,如出现任一故障会导致操作人员对一台或几台推进器失去控制时,控制器会将上述推进器的推进命令自动归零,其他未受影响的推进器在操纵杆的控制下,以确保船舶安全。
3 故障模式与影响分析(FMEA)
FMEA的主要功能是说明与动力定位系统有关的系统设备的不同的故障模式,以及发生故障后对动力定位所产生的影响分析。FMEA主要包括:所有系统的主要部件的描述及相互之间的作用;所有的故障模式;探测故障的方法;故障对船位及系统的影响分析等。
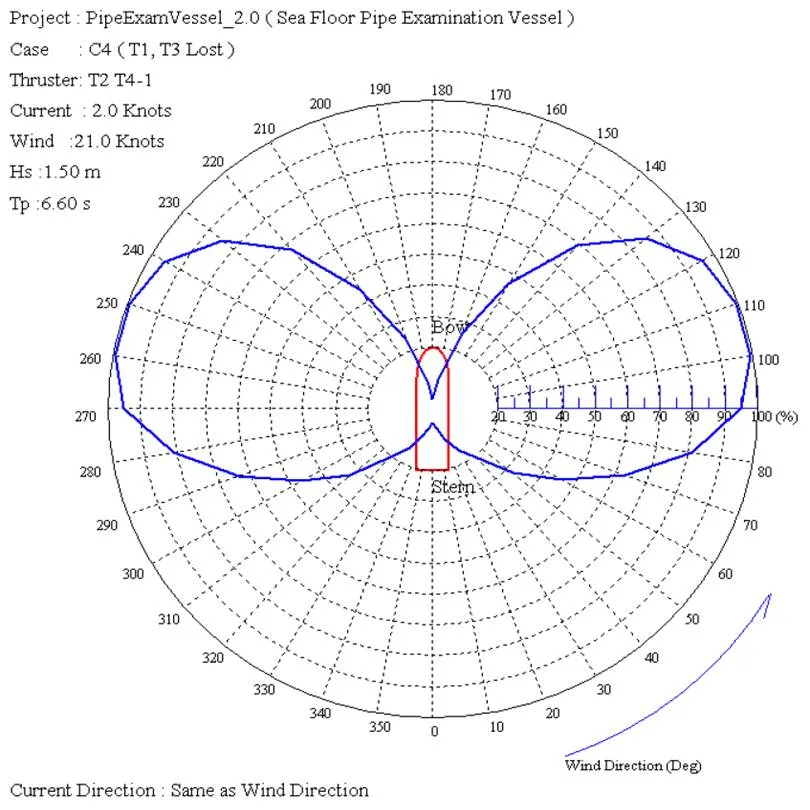
图4 海洋石油791动力定位性能分析图
FMEA中最严重的故障点即最大单点故障。海洋石油791最大单点故障为主配电板汇流排短路引发主配电板BusA或BusB汇流排故障,从而导致一台艏侧推和一台全回转推进器丢失,根据FMEA要求,最大单点故障发生时,在规定的最大环境条件下,船舶依靠剩余推进器仍可保持当前位置及艏向。图4为本船失去一台艏侧推和一台全回转推进器时的动力定位性能分析图。根据分析图可以判断在当前工作环境下情况下,船舶是否可以依靠剩余推进器来保证船舶的位置及艏向。
此外,动力定位船舶通过FMEA分析可以找出船舶设计、建造、主要设备和系统中不能满足IMO和各船级社规范之处,找出潜在故障模式和风险并分析原因,避免在船舶建造阶段因为大的改动,重新订购设备等引起的时间和经济损失,还能提升船舶的冗余性和安全性能[5]。
4 结束语
船舶动力定位是较为先进的定位技术,并且发展迅速。但是国内船舶动力定位控制系统一直被国外设备商垄断,比较知名的动力定位设备商有挪威的Kongsberg公司,美国的GE公司,芬兰的Navis公司以及荷兰的Praxis公司等。目前,国内对船舶动力定位系统的研究还处于理论研究阶段,其研究主要集中在船舶运动模型、控制模型和控制算法等方面,对FMEA的研究较少。近年来,随着我国船舶与海洋工程的迅速发展,作为船舶及海洋平台运营基础技术的动力定位系统必将得到更多的重视和发展。
[1] 王卫卫. 动力定位(DP)系统简介[J]. 广东造船, 2014, 33(1): 52-54.
[2] 中国船级社. 钢制海船入级规范(修改通报)[M]. 北京: 人民交通出版社, 2014.
[3] 赵志高, 杨建民, 王磊, 等. 动力定位系统发展状态及研究方法[J]. 海洋工程, 2002, 20(1): 91-97.
[4] 马超, 庄亚锋, 陈俊英. 船舶动力定位系统技术[J]. 中国造船, 2010, 50(A11): 52-57.
[5] 沈锦康. 动力定位船舶的FMEA介绍[J]. 江苏船舶, 2010, 27(3): 26-29, 32.
Failure mode and effect analysis of DP-2 dynamic positioning ships
Qu Zhaoyuan1, Weng Wu2
(1.CNOOC Energy Development Oil Production Service Corporation, Tianjin 300451China; 2.Wuhan Institute of Marine Electric Propulsion, Wuhan 430064 China)
U674
A
1003-4862(2022)12-0071-05
2022-4-23
曲兆源(1982-),男,工程师。研究方向:船舶电气与自动化。E-mail:quzhy3@cnooc.com.cn
