一种电机驱动系统电流传感器故障诊断方法
2023-01-03高原,金翔,李锐
高 原,金 翔,李 锐
应用研究
一种电机驱动系统电流传感器故障诊断方法
高 原1,金 翔2,李 锐2
(1. 海装驻锦州地区军事代表室,辽宁锦州 121000;2. 武汉第二船舶设计研究所,武汉 430074)
对于电机驱动系统,准确、可靠、实时的控制是保证系统安全稳定运行的基础,而传感器的可靠运行是实现合理控制的关键一环。因此,为了保证系统的可靠运行,必须对传感器的故障进行准确、快速的辨识。本文以三相永磁同步电机驱动系统中的电流传感器为例,分析了传感器常见故障的特性,并考虑到卷积神经网络的特征提取能力,提出了一种基于卷积神经网络的故障诊断方法,最后通过仿真验证了该方法的有效性。
电机驱动系统 电流传感器 故障诊断 卷积神经网络
0 引言
电机驱动系统是多种应用场合的关键系统,其准确、可靠、实时的控制是保证系统安全稳定运行的基础。而传感器作为驱动系统中检测电压、电流以及转速信号的元件,其可靠运行是实现合理控制的关键一环。但是,由于设备老化、环境干扰以及机械振动等因素的影响,驱动系统中的传感器易出现故障。传感器故障可能导致测量信号失真,造成性能下降,甚至由于驱动系统的闭环控制策略而损坏其他部件[1]。因此,有必要对传感器的故障进行准确、快速的辨识与定位,以保证系统的安全可靠运行。
根据故障特性,传感器的故障大致可以分为增益故障,噪声故障,漂移故障,失效故障。在过去的几十年中,学者们进行了相关研究,其提出的故障诊断方法大致可以分为:基于模型故障诊断、基于信号故障诊断、基于知识故障诊断。
基于模型的故障诊断法是通过构建系统的等效模型以预测系统的理想输出,通过预测值与实测值的残差来评价传感器的工作状态。该类方法简单直接,但是在复杂系统中,因为噪声、参数偏差等多种不利因素,使得对系统的准确建模存在困难,一定程度上限制了该方法的应用[2-3]。
基于信号的故障诊断方法采用信号处理技术,包括时频分析方法,如小波变换、希尔伯特转换、派克矢量等,对测量信号的特征值如峰值、周期、极差等进行评价,从而对传感器的故障进行诊断和检测。这一类方法的弊端是鲁棒性较差,暂态过程易出现误诊断[4]。
基于知识的传感器故障检测方法是人工智能技术快速发展的成果,其主要通过对系统运行中相关数据的处理分析,自动学习系统故障表征与故障模式之间的关系以进行故障识别[5-6]。其中,传统的数据驱动的方法,如支持向量机(SVM)、K近邻算法(KNN)、模糊逻辑等需要手工设计故障特征[7-8],再利用相关网络去构建特征与故障类型之间的关系。然而,手工设计特征依赖专家知识,并且特征的合理性对故障的准确辨识有决定性影响,是一个耗时耗力的过程。考虑到在图像识别领域,卷积神经网络能够自动提取图片特征,进行模式识别,省略了人为构建故障特征的过程,更加的智能与高效。因此,本文将卷积神经网络迁移应用至传感器的故障诊断问题上,以三相永磁同步电机(PMSM)驱动系统中的电流传感器为例,提出了一种基于卷积神经网络的电流传感器故障诊断方法,将实际系统中的传感器测量信号送入卷积神经网络,通过网络自动提取故障特征,再构建特征与故障模式之间的映射关系以进行故障的识别。
本文的章节安排如下:第一章介绍系统模型以及电流传感器的故障特性,相关的故障诊断方法将在第二章进行详细叙述,第三章进行仿真验证以及结果分析,最后,在第四章中进行了总结。
1 系统描述和故障分析
本文以三相永磁同步电机驱动系统为例,进行传感器的故障诊断分析,系统示意图如图1所示。在该系统中,矢量控制是常见的控制方式,其需要电流和转速传感器反馈信息,形成闭环控制。考虑到随着数字处理技术的发展,无速度传感器控制在电动机传动系统中的应用越来越广泛,对转速传感器的依赖性也随之降低。因此本文主要聚焦于驱动系统中的电流传感器的故障诊断问题。

图1 系统结构示意图
电流传感器故障的原因有很多,诸如化学腐蚀、机械振动、环境影响等都会导致传感器测量信号失真,常见的故障类型与原因如表1所示。
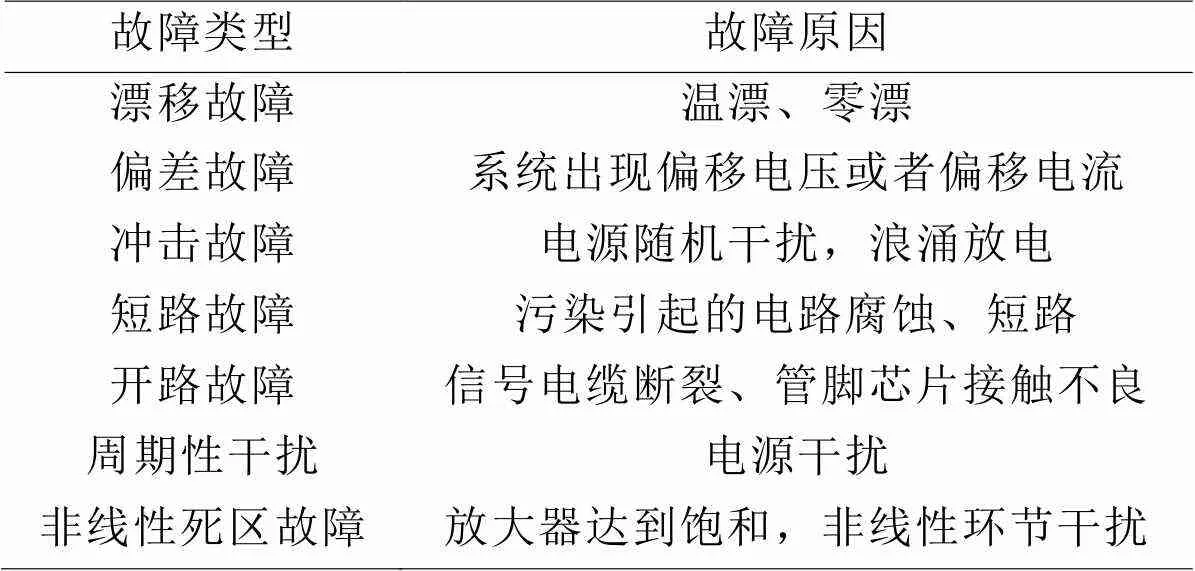
表1 电流传感器常见故障类型及原因
从反馈信号的输出特征来看,可以将传感器故障大致归类为以下几种情况,分别为增益故障,噪声故障,漂移故障,失效故障。接下来对不同类型的传感器故障进行数学模型的搭建。
电流传感器漂移故障:
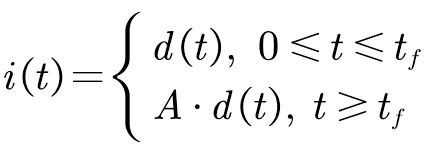
电流传感器增益故障:
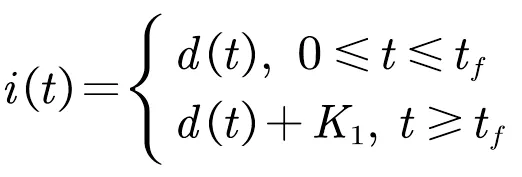
电流传感器失效故障:

电流传感器噪声故障:

上式中t表示故障时刻,()表示正常的测量值,表示随机噪声。
这些故障将导致闭环控制中的反馈信号出现偏差,从而生成错误的指令信号,进一步恶化系统表现,甚至损坏系统部件、造成安全隐患。
2 故障诊断方法
对于上述电机驱动系统中的传感器漂移、失效、噪声、增益四种故障,本文选择机器学习的CNN算法对其进行故障诊断。
CNN的结构如图2所示,主要由输入层、卷积层、池化层、全连接层和输出层构成,其通过卷积层和池化层能够自动学习输入信号的特征,并且通过多层卷积和池化能够学习到更深层次的特性。同时CNN使用局部感知和参数共享,可有效降低训练参数的数量,具有较强的实用性。因此CNN广泛应用于图像分类和物品识别等应用场合。
该网络的训练主要包括两个阶段,第一阶段为前向传播过程,在该阶段中,主要根据输入信号逐步计算输出层的信号;第二阶段为反向传播过程,主要是根据计算结果与目标值的差异,由输出层向输入层逐层更新网络参数。训练一直重复上述过程,直至输出值与目标值之间的误差小于设置的期望值时,训练过程结束,具体的计算细节可参考文献[9]。

图2 1DCNN结构模型图
对于CNN在故障诊断方向的应用,考虑到CNN无需人工提取特征值,因此,可直接利用传感器的原始时域信号来完成故障诊断。其故障诊断流程如下:
1)数据采集以及处理:通过仿真得到数据集并对数据进行划分。
2)CNN模型的构建:确定模型的结构及参数,包括卷积步长、卷积核的大小、池化核的大小、激活函数及迭代次数等。同时对网络模型的参数进行初始化设置。
3)CNN网络模型的培训与测试:先使用数据的训练集完成网络的训练,再使用数据的测试集检测网络的性能。
3 仿真验证和结果分析
本文在MATLAB/Simulink中建立了三相PMSM矢量控制系统模型,相关参数如表2所示。
3.1 电流传感器的故障仿真方法
考虑到三相系统中的电流传感器通常为2个,本文以A、B相传感器为例,假设A相传感器发生故障,根据章节1中的相关公式模拟传感器的四种故障。
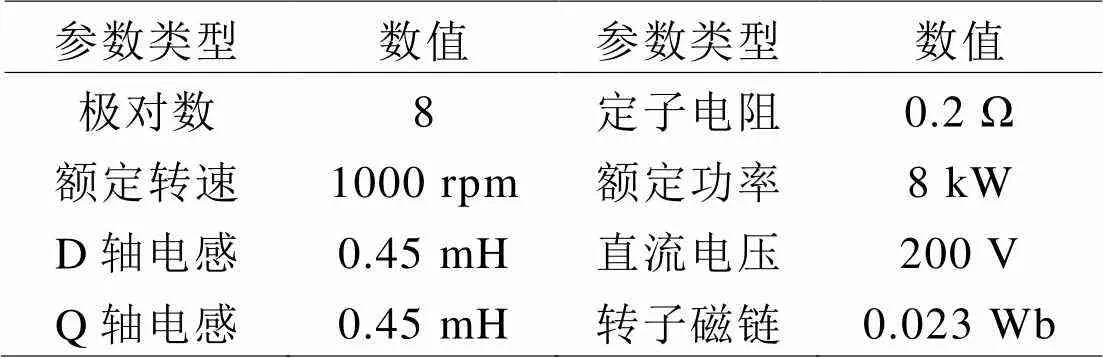
表2 PMSM驱动系统参数
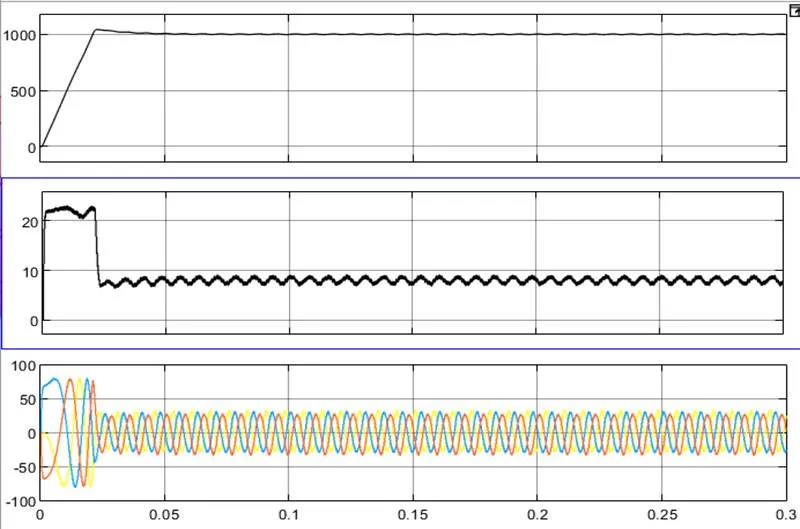
图3 漂移故障下转速-转矩-电流波形

图4 增益故障下转速-转矩-电流波形

图5 失效故障下转速-转矩-电流波形

图6 噪声故障下转速-转矩-电流波形
3.2 故障数据的获取
在上述仿真模型的基础上,分别收集A相电流传感器增益故障、漂移故障、失效故障、噪声故障以及正常情况的工作数据。在各种情况下,首先保持额定转矩,改变速度采集100组数据,再保持额定转速不变,改变转矩采集到100组数据,每组数据采集10000个点(采样频率10 kHz),五种工况下共计1000组数据。同时设置标签分类为正常情况为标签0,噪声故障为标签1,增益故障为标签2,漂移故障为标签3,失效故障为标签4。按照比例7:3将数据划分为训练集和测试集,训练集700组数据,测试集300组数据。
3.3 故障诊断模型的参数设置
基于网络的原理,搭建一维卷积神经网络的模型,包括输入层、卷积层、激活层、池化层、全连接层五个部分。使用一维宽卷积核,从而得到相当大的感受野,也可以获得更多的有效特征信息。而对于池化层使用的则是最大池化方法,从而能够保留更主要的特征信息。激活函数采用的是ReLU函数。

表3 网络结构
3.4 实验结果与分析
首先,将训练集输入到新建立的卷积神经网络中进行反复迭代练习。接着使用测试集进行网络性能的测试,训练集和测试集的损失函数值以及准确率如图7所示。可以看到建立的模型在迭代十次之后损失函数值不再发生显著变化。此时模型在测试集上的精确度约为94%,并且未出现过拟合现象,这也表明了卷积式神经网络的模拟训练成效相当不错。

图7 训练集与测试集损失函数及准确度趋势图
为了更加清晰地看到卷积神经网络模型对于测试集各故障类型的识别效果,对测试集的测试结果导出混沌矩阵进行分析,结果如图8所示,以及测试集的堆叠图如下图9所示。可以看出噪声故障和正常情况之间的识别存在误差,其原因可能为仿真模型模拟噪声故障时,设置的随机噪声的值较小,导致噪声故障和正常工况不易区分。其他几种故障的识别准确度都接近100%,表明此卷积神经网络具有较高的故障识别能力。

图8 诊断结果的混沌矩阵

图9 诊断结果的堆叠图
4 总结
本文将卷积神经网络迁移应用至电流传感器的故障诊断领域,将传感器的时域信号直接输入至卷积神经网络,借助网络能自动提取输入信号特征的优点,让其自适应的去捕捉输入信号的故障特征,省略了人为设计故障特征的过程,更加的高效与智能。并通过仿真的方式去验证了该方法的有效性,仿真结果表明,该诊断方法在测试集上的准确率为93.5%,证明所搭建的卷积神经网络模型对于电流传感器的故障诊断性能具有一定的优越性和稳定性。
[1] Gou B, Xu Y, Xia Y, et al. An online data-driven method for simultaneous diagnosis of IGBT and current sensor fault of three-phase PWM inverter in induction motor drives[J]. IEEE Trans Power Electron, 2020, 35(12): 13281-13294.
[2] 周洪雷. 内置式永磁电机驱动系统电流传感器故障容错控制[D]. 哈尔滨: 哈尔滨工业大学, 2019.
[3] 曹文明. 异步电机驱动系统中的电流传感器故障诊断[D]. 武汉: 华中科技大学, 2015.
[4] 王国鑫. 永磁电机驱动系统传感器故障诊断与容错控制[D]. 哈尔滨: 哈尔滨工业大学, 2018.
[5] Xia Y, Xu Y, Gou B. Current sensor fault diagnosis and fault-tolerant control for single-phase PWM rectifier based on a hybrid model-based and data-driven method[J]. IET Power Electron, 2021, 13(18): 4150-4157.
[6] 王权. 电动汽车电机驱动系统传感器故障诊断及容错研究[D]. 成都: 电子科技大学, 2012.
[7] 姜俊. 六相永磁同步电机控制器故障诊断[D]. 沈阳: 沈阳工业大学, 2017.
[8] 张昊宇, 姚钢, 殷志柱, 等. 基于小波神经网络与KNN机器学习算法的六相永磁同步电机故障态势感知方法[J]. 电测与仪表, 2019, 56(2): 1-9.
[9] Krizhevsky A, Sutskever I, Hinton G E. ImageNet classification with deep convolutional neural networks[J]. Commun ACM, 2017, 60(6): 84-90.
A fault diagnosis method of current sensor in motor drive system
Gao Yuan1, Jin Xiang2, Li Rui2
(1. The Navy Representative Office in Jinzhou, Jinzhou 121000, Liaoning, China; 2. Wuhan Second Ship Design and Research Institute, Wuhan 430074, China)
TP212
A
1003-4862(2022)12-0025-05
2022-09-09
高原(1978-),男,高级工程师。研究方向:舰船电力系统。E-mail:1085955753@qq.com
